
Workshops
Workshops MathWorks Sponsor Workshop on “Techniques for Project Based Learning with Low Cost Hardware Support" Time: 12:15 pm – 1:15 pm, Wednesday, October 22, 2014 Location: La Villita Salon A Graduate Student Lunch Workshop on “Future Career Path Selection and Development" Time: 12:15 pm – 1:15 pm, Thursday, October 23, 2014 Location: La Villita Salon A Panelists: Prof. Junmin Wang (moderator), Ohio State University Prof. Jeff Scruggs, University of Michigan Prof. Greg Shaver, Purdue University Prof. Cornel Sultan, Virginia Tech Prof. George Zhu, Michigan State University Prof. Lei Zuo, Virginia Tech This student lunch workshop aims to have an open discussion on future career path selections and development with the graduate students. Six panelists with various academic and industrial career paths will share their thoughts and opinions on career selection, preparation, and development with graduate students. A large portion of the workshop will be dedicated to answering questions from the student attendees. Students at all stages in their training are welcome to attend this free workshop. Lunch boxes and drinks will be provided. Short bios of the panelists: Jeff Scruggs Bio: Jeff Scruggs is an Associate Professor in the Department of Civil & Environmental Engineering at the University of Michigan, which he joined in September of 2011. He received his B.S. and M.S. degrees in Electrical Engineering from Virginia Tech in 1997 and 1999, respectively, and his Ph.D. in Applied Mechanics from Caltech in 2004. Prior to joining UM, he held postdoctoral positions at Caltech and UCSD, and was on the faculty at Duke University from 2007-11. Scruggs’s current research is in the areas of mechanics, vibration, energy, and control. His research is supported by NSF, ONR, and DOE. Greg Shaver Bio: Greg Shaver is an associate professor of Mechanical Engineering at Purdue University, joining the Purdue Faculty in Fall 2006. He is also a graduate of Purdue University's School of Mechanical Engineering, having obtained a Bachelor's degree with highest distinction in 2000, and holds a Master degree and a Ph.D. in Mechanical Engineering from Stanford University, earning the later degree in Summer 2005. His research interests and background include the modeling, optimization, and control of advanced IC engine systems. Greg is an active member of ASME, participating in the Dynamic Systems and Controls Division and the Automotive and Transportation Systems Technical Committee. He is an associate editor for the International Journal of Engine Research and the ASME Journal of Dynamic 1 Systems, Measurement and Control. Greg is an awardee of the 2005 Kalman award for the best paper published in the Journal of Dynamic Systems, Measurement, and Control; the 2012 award for best paper in the Journal of Automobile Engineering; the 2011 SAE Max Bentele Award for Engine Technology Innovation, and the 2013 Ralph Teetor Education Award. In 2014 he was awarded the Purdue College of Engineering’s Early Career Excellence in Research Award, and was selected as a Purdue University Faculty Scholar. Cornel Sultan Bio: Cornel Sultan received a Ph.D. in Aeronautics and Astronautics from Purdue University in 1999. Between 1999-2007 he was affiliated with a start-up company, Tensegra Inc. (19992001), Scientific Systems Company Inc. (SSCI; 2001-2004), Harvard Medical School (2001-2003), and United Technologies Research Center (UTRC; 2004-2007). At Tensegra and Harvard Medical School his work was focused on structural modeling and design involving tensegrity principles, for artificial spinal discs and the cytoskeleton of living cells. At SSCI and UTRC he worked primarily on projects related to formation flying spacecraft and helicopter control such as swashplateless and active rotors, heavy lift helicopters, coordinated helicopters. He joined Virginia Tech’s Aerospace and Ocean Engineering Department in 2007 where he built up a research program in helicopter modeling and control, energy harvesting, tensegrity structures and membranes, and coordination. In 2010 he received a NSF CAREER Award entitled Bio-inspired Controllable Tensegrity Structures. Junmin Wang Bio: Junmin Wang is an associate professor in mechanical engineering at Ohio State University. He received the B.E. degree in Automotive Engineering and his first M.S. degree in Power Machinery and Engineering from the Tsinghua University, Beijing, China in 1997 and 2000, respectively. He received his second and third M.S. degrees in Electrical Engineering and Mechanical Engineering from the University of Minnesota, Twin Cities in 2003, and the Ph.D. degree in Mechanical Engineering from the University of Texas at Austin in 2007. Dr. Wang has 5-years of full-time industrial research experience (2003 - 2008) at Southwest Research Institute (San Antonio, Texas) where he was a Senior Research Engineer. In September 2008, Dr. Wang joined Ohio State University and founded the Vehicle Systems and Control Laboratory (VSCL) whose major research interests include control, modeling, estimation, optimization, and diagnosis of dynamical systems, specifically for automotive engine, powertrain, after treatment, hybrid, flexible fuel, renewable energy, (electric) ground vehicle, transportation, sustainable mobility, energy storage, and mechatronic systems. Dr. Wang is the author or co-author of more than 180 peer-reviewed journal and conference papers, 2 book chapters, and holds 11 U.S. patents. Dr. Wang serves as an Associate Editor for the IEEE Transactions on Vehicular Technology, IFAC Control Engineering Practice, ASME Transactions Journal of Dynamic Systems, Measurement and Control, and SAE International Journal of Engines. Prof. Wang is a recipient of NSFCAREER Award in 2012, SAE International Ralph R. Teetor Educational Award in 2012, the 2009 SAE International Vincent Bendix Automotive Electronics Engineering Award in 2011, Office of Naval Research Young Investigator Program (ONR-YIP) Award in 2009, and ORAU Ralph E. Powe Junior Faculty Enhancement Award in 2009. Guoming (George) Zhu Bio: Dr. Guoming (George) Zhu is a professor of mechanical engineering (ME) and electrical/computer engineering (ECE) at the Michigan State University. Prior to joining the ME and ECE departments, he was a technical fellow in advanced powertrain systems at the Visteon Corporation. He also worked for Cummins Engine Co. as a technical advisor. Dr. Zhu earned his PhD (1992) in aerospace engineering at Purdue University. His BS and MS degrees (1982 and 1984 respectively) were from Beijing University of Aeronautics and Astronautics in China. His current research interests include closed-loop combustion control, adaptive control, closed-loop system identification, LPV control of automotive and structural systems, hybrid powertrain control and optimization, and thermoelectric 2 generator management system. Dr. Zhu has over 30 years of experience related to control theory and applications. He has authored or co-authored more than 140 refereed technical papers and received 40 US patents. He was an associate editor for ASME Journal of Dynamic Systems, Measurement and Control and a member of editorial board of International Journal of Powertrain. Dr. Zhu is a Fellow of ASME and SAE. Lei Zuo Bio: Lei Zuo completed his PhD in mechanical engineering and two MS degrees in both mechanical engineering and electrical engineering from MIT in 2005 and 2002. He also held a B.S. degree in automotive engineering from Tsinghua University. He joined in the department of mechanical engineering of Virginia Tech as an associate professor with tenure in 2014. Prior to that he was an assistant and associate professor in the State University of New York at Stony Brook from 2008 to 2014, and worked in industry from 2004 to 2008. Lei Zuo's research interest includes energy harvesting, mechatronic systems, vibration control, smart structures, thermoelectrics, and advanced sensors. Since Sept 2008 he has secured $5.56M research grants (4.86M as the PI) from federal agencies NSF, DOE, DOT, ONR, and EPA, state agencies NYSERDA and SUNY/RF, and industry. He has authored/co-authored about 100 papers in journals and conferences and holds several patents. Lei Zuo is a receipt of the 2014 SAE Ralph R. Teetor Educational Award, 2014 ASME Best Paper Award in Structures and Structural Dynamics, 2012 Best Application of Energy Harvesting, 2011 R&D 100 Award, and 2010 Best Technology Development of Energy Harvesting. He serves as a technical editor of IEEE/ASME Transaction on Mechatronics and an associated editor of ASME Journal of Vibration and Acoustics. 3 Special/Frontier Sessions Special Session: Advanced Control and Monitoring Systems for Drilling Automation (WA8) Time: Wednesday, Oct. 22, 2014, 10:00 am – 12:00 pm Location: Cavalier Organizers: Prof. Dongmei “Maggie” Chen, University of Texas at Austin Prof. Scott Moura, University of California at Berkeley Dr. Mitchell Pryor, University of Texas at Austin This special session includes a 40-minute keynote speech and four 20-miniute presentations. The keynote speech is presented by Dr. Jason Dykstra of Halliburton as follows. Keynote Speech Solving the big challenges in the oil service industry with advanced control systems Dr. Jason Dykstra Chief Technical Advisor, Corporate Technology and Innovation Halliburton Abstract This talk will encompass the challenges faced by the oil and gas industry to eliminate cost, environment, and technical barriers, and how modeling and control systems will be an enabler for future hydrocarbon production. Within the industry it is commonly stated that “there is no more easy oil”, this challenge has led to technology breakthroughs allowing for extraction of oil and gas out of shale. Referred to as the “shale revolution” today, just a decade ago these formations were too costly to produce. I believe we are on the cusp of another technology revolution within the industry, where automation and controls enables performance improvements that open up new opportunities to produce hydrocarbons commercially. The talk will cover the service side of the oil and gas industry, and how all the parts fit together from finding the hydrocarbons, to well construction, production, and abandonment. The big challenges that face the industry in terms of extreme environments, sensing, actuation, and data collection will be presented, along with an overview of some of the work the Automation Center of Excellence at Halliburton is doing to solve these problems. Speaker’s Biography Dr. Jason Dykstra received his PhD in Mechanical Engineering from the University of Wisconsin – Madison in 2003. He is currently the Chief Advisor to the corporate research group, where he tasked with creating the technology vision of high risk research. He has worked in the automotive, nuclear, steel mill, and heavy equipment industries before joining the oil services company Halliburton upon completion of his doctorate. At Halliburton he has designed control systems for cementing, cryogenic nitrogen pumping, chemical blending, and high pressure fracking equipment along with fault detection and virtual sensing system that are used in over 100 countries every day. He has invented several award winning tools that have been installed in wells in South America, the North Sea, and the Middle East. He holds 56 US patents with over 70 patent applications in process, and has won the E&P meritorious award for engineering innovation 2012, the OTC spotlight on innovation award 2012, and a finalist in the world oil awards 2013. Dr. Dykstra is currently interested in creating value by distilling control theory to practice in the broad range of products and services Halliburton offers. 4 Special Session: Texas Biorobotics I (WM8) & II (WP8) Time: Wednesday, Oct. 22, 2014, 1:30 pm – 3:30 pm & 4:00 pm – 6:00 pm Location: Cavalier Organizers: Prof. Robert Gregg, University of Texas at Dallas Prof. James Sulzer, University of Texas at Austin While Texas has long been a center of robotics, it has more recently become a focus of biorobotics, with wide ranging applications to health care. The purpose of this session is to present the cutting edge bioengineering and biorobotics research being performed here in Texas. Speaker #1: Prof. Pranav Bhounsule, University of Texas at San Antonio Abstract: Practical legged systems will need to be energy savvy, reliable and robust to be useful. However, current bipedal robots are nowhere close. The most energy-efficient robots, like the passive dynamics walkers, fall down often; while the more robust and reliable robots, like Honda ASIMO and Google PETMAN, consume way too much energy. In this talk, I will present a reflex-based control architecture for walking robots. Next, I will show how we used the control framework to control a custom built simple bipedal robot leading to a 40 miles non-stop walk on a single battery charge using only 6 cents worth of electricity. We suggest that ideas from our reflex-based control might be useful to the rehabilitation community, for example, control of powered prosthetics. Speaker’s Bio: Pranav Bhounsule is an assistant professor in the Department of Mechanical Engineering at the University of Texas at San Antonio. He is broadly interested in developing model-based and learning-based control algorithms for manipulators and legged systems. He received a Bachelor’s degree in Mechanical Engineering from the Goa Engineering College, India, followed by a Master’s degree in Engineering Mechanics from the Indian Institute of Technology Madras, and the PhD degree in Mechanical Engineering from Cornell University. He spent two years as a post-doctoral researcher at Disney Research Pittsburgh. At Disney Research, he developed automation tools for entertainment humanoids, also called Audio-Animatronics Figures, deployed at Disney theme parks around the world. For his PhD, he developed energy-efficient control algorithms for walking robots that lead to a record 40 mile non-stop robot walk on a single battery charge. His PhD work has been featured in Engadget, IEEE spectrum, Gizmag, PC world, MSNBC, Wired News, and Popular science. Speaker #2: Prof. Alan Bowling, University of Texas at Arlington Abstract: This work involves the design, simulation, and experimental testing of a mechanically actuated smart hospital bed for the prevention of pressure ulcers in hospital patients. The smart hospital bed, or Smartbed, is designed to improve the “turning” process currently performed by health care workers, ensuring that patients are turned consistently while decreasing the labor requirement for caregivers. The mechanical structure of the bed is described, along with its advantages over current Smartbed products. Next, dynamic models of the Smartbed actuating systems are discussed along with descriptions of the devised single-unit and overall bed control systems. An update on the status of this project is presented along with plans for future developments. Speaker’s Bio: Prof. Alan Bowling is from Austin, Texas and obtained his Bachelor's degree in Aerospace engineering from the University of Texas at Austin in 1988. After graduating he worked for McDonnell Douglas Space Systems Company in Houston, Texas for two years before going to graduate school at Stanford University and obtaining a Masters degree as well as a Ph. D. in Mechanical engineering in 1998. After graduation he pursued entrepreneurial activities in California for about three years. He joined the faculty at the University of Notre Dame in 2001 and moved to The University of Texas at Arlington in 5 2008. Prof. Bowling's interests lie in the areas of multibody dynamics, design, and control applied to research in legged robots and biomechanics at the molecular level. Speaker #3: Prof. Ashish Deshpande, University of Texas at Austin Abstract: In the ReNeu Robotics Lab at The University of Texas at Austin we are motivated to design and build robots for rehabilitation, prosthetics, and assistive applications. The design challenges and opportunities for robots attached to human limbs are fundamentally different from those associated with typical industrial robots working in isolated and structured environments. Furthermore, with the increasing proportion of seniors and veterans in the US, the need for assistive and rehabilitative robotic devices is on the rise. Currently our research is focused on the mechanical and controller design of robotic systems, including robotic hands and wearable robots for rehabilitation of the upper-body. This research is informed by results from experiments with human subjects, simulations of human musculoskeletal systems, and mathematical analyses of human-robot interactions. Specifically, my research program can be divided into two major research themes: i) Robotic Hand Design and Controls, and ii) Wearable Robotic Systems for Rehabilitation. The unique contributions from these two research themes include the development of next generation of prosthetic hands, improved human-like controls of existing robotic hands, novel wearable robotic devices for delivering rehabilitative interventions, and deeper understanding of the underlying mechanisms of motor recovery after a neurological disorder. Speaker’s Bio: Ashish D. Deshpande is an assistant professor in the Mechanical Engineering Department at the University of Texas since 2011. Dr. Deshpande received his Ph.D. degree in Mechanical Engineering from the University of Michigan, Ann Arbor, in 2007. He then completed a post-doctoral fellowship in the Neurobotics Laboratory at the University of Washington in Seattle. Dr. Deshpande is a recipient of the NSF-CAREER award. At The University of Texas at Austin, Dr. Deshpande directs the Rehabilitation and Neuromuscular (ReNeu) Robotics Lab. The Lab focuses on the development of robotic devices, based on biomechanical analyses, to assist in rehabilitation, to improve prostheses design, and to provide fitness opportunities for the severely disabled. The study of underlying mechanisms of human movement control through human subject experiments and mathematical modeling is another major research area in the ReNeu Robotic Lab. The ReNeu Robotics Lab has a special interest in the study of hands, and is currently developing robotic hands for prosthetic and rehabilitation applications, and conducting human subject studies for an improved understanding of human hand biomechanics and control. Speaker #4: Prof. Robert Gregg, University of Texas at Dallas Abstract: High-performance prostheses could significantly improve the quality of life for nearly a million American lower-limb amputees, whose ambulation is slower, less stable, and requires more metabolic energy than that of able-bodied individuals. Although recent motorized prostheses have the potential to restore mobility in this impaired population, critical barriers in control technology still limit their clinical viability. These systems discretize the gait cycle into multiple distinct control models, each tracking reference joint torques, kinematics, or impedances that resemble human behavior. These increasingly complex designs are difficult to tune to individuals and generalize to different tasks. However, recent bipedal robots can stably walk, run, and climb stairs with a single control model based on virtual constraints, which drive joint patterns as functions of a mechanical variable that continuously represents the robot’s progression through the gait cycle, i.e., a sense of “phase.” These breakthroughs in robot control theory present an emerging opportunity to address a key roadblock in prosthetic and orthotic control technology, which will be the topic of this talk. A unifying prosthesis controller will be designed to enforce biomimetic virtual constraints between the COP and joint angles, known in the prosthetics field as the “effective shapes” of the stance leg during walking. Recent experiments with above-knee 6 amputee subjects using a powered prosthetic leg will be presented, and ongoing research directions will be previewed. Speaker’s Bio: Robert D. Gregg IV received the B.S. degree in electrical engineering and computer sciences from the University of California, Berkeley in 2006 and the M.S. and Ph.D. degrees in electrical and computer engineering from the University of Illinois at Urbana-Champaign in 2007 and 2010, respectively. He joined the Departments of Bioengineering and Mechanical Engineering at the University of Texas at Dallas (UTD) as an Assistant Professor in June 2013. Prior to joining UTD, he was a Research Scientist at the Rehabilitation Institute of Chicago and an Engineering into Medicine Postdoctoral Fellow at Northwestern University. His research concerns the control mechanisms of bipedal locomotion with application to wearable control systems, including prostheses and orthoses. Dr. Gregg is a recipient of the NIH Director's New Innovator Award and the Career Award at the Scientific Interface from the Burroughs Wellcome Fund. He also received the Best Technical Paper Award of the 2011 International Conference on Climbing and Walking Robots, the 2009 O. Hugo Schuck Award from the IFAC American Automatic Control Council, and the Best Student Paper Award of the 2008 American Control Conference. Dr. Gregg is a member of the IEEE Control Systems Society and the IEEE Robotics & Automation Society. Speaker #5: Prof. Yildirim Hurmuzlu, Southern Methodist University Speaker’s Bio: Yildirim Hurmuzlu received his Ph.D. degree in Mechanical Engineering from Drexel University. Since 1987, he has been at the Southern Methodist University, Dallas, Texas, where he is a Professor and Chairman of the Department of Mechanical Engineering. His research focuses on nonlinear dynamical systems and Control, with emphasis on robotics, biomechanics, and vibration control. He has published more than 60 articles in these areas. Dr. Hurmuzlu is the associate Editor of the ASME Transactions on Dynamics Systems, Measurement and Control. Speaker #6: Prof. Ann Majewicz, University of Texas at Dalla Abstract: Human-controlled robotic systems can greatly improve healthcare by synthesizing information, sharing knowledge with the human operator, and assisting with the delivery of care. Robotic devices could also enable complex medical procedures currently not possible. In needle-based procedures, for example, straight needles cannot reach some targets within the body due to obstacles such as bones or vessels. Long, thin, flexible needles with asymmetric tips can be used to reach targets which are unreachable with straight needles. Manual control of these needles can be challenging due to noninuitive motion constraints, as well as manipulation challenges related to defining the overall needle path curvature. We present a Cartesian space teleoperation algorithm in which users can control the desired position of the needle tip in three-dimensional space with a haptic user interface. The curvature of the corresponding needle path is autonomously controlled using novel duty-cycling techniques. Recent experiments demonstrating teleoperated robotic needle steering in artificial tissue and an animal cadaver will be presented. Speaker’s Bio: Ann Majewicz completed B.S. degrees in Mechanical Engineering and Electrical Engineering at the University of St. Thomas, the M.S.E. degree in Mechanical Engineering at Johns Hopkins University, and the Ph.D. degree in Mechanical Engineering at Stanford University. Dr. Majewicz joined the Department of Mechanical Engineering as an Assistant Professor in August 2014, where she directs the Human-Enabled Robotic Technology Laboratory. Her research interests focus on the interface between humans and robotic systems, with an emphasis on improving the delivery of surgical and interventional care, both for the patient and the provider. Speaker #7: Prof. Marcia O’Malley, Rice University 7 Abstract: Robotic devices have been used for several decades to deliver upper limb therapy after neurological injury. Though results have been mixed, it is shown that outcomes of robotic therapy can exceed traditional therapy when participants are engaged, both cognitively and through active participation of their sensorimotor systems, during rehabilitation. We employ a range of techniques for ensuring active engagement of participants in therapeutic interventions with robotic devices after neurological injury. Control architectures can leverage novel hardware design elements in order to facilitate physical interaction for rehabilitation, and for gaining insight into the neurological basis for recovery. Other approaches are intended to continuously challenge the user during upper limb rehabilitation in order to facilitate plasticity. These approaches can require initiation or sustained input from the user in order to generate desired movements. Further, controllers can be designed to adapt to the user's changing capabilities, which may be dependent on position or direction of movement. More recently, we have been working towards non-invasive brain-machine interfaces aimed to detect intention of the participant and support therapeutic movements. Results from a variety of ongoing clinical evaluations with custom upper limb exoskeleton devices will be discussed in relation to these topics. Speaker’s Bio: Marcia O'Malley received the B.S. degree in mechanical engineering from Purdue University in 1996, and the M.S. and Ph.D. degrees in mechanical engineering from Vanderbilt University in 1999 and 2001, respectively. She is currently an Associate Professor of Mechanical Engineering and of Computer Science at Rice University and directs the Mechatronics and Haptic Interfaces Lab. She is an Adjunct Associate Professor in the Departments of Physical Medicine and Rehabilitation at both Baylor College of Medicine and the University of Texas Medical School at Houston. Additionally, she is the Director of Rehabilitation Engineering at TIRR-Memorial Hermann Hospital, and is a co-founder of Houston Medical Robotics, Inc. Her research addresses issues that arise when humans physically interact with robotic systems, with a focus on training and rehabilitation in virtual environments. In 2008, she received the George R. Brown Award for Superior Teaching at Rice University. O'Malley is a 2004 ONR Young Investigator and the recipient of the NSFCAREER Award in 2005. She is a Fellow of the American Society of Mechanical Engineers. Speaker #8: Prof. Josh Schultz, University of Tulsa Abstract: While advances in robotics composed of rigid parts have produced great benefits in the manufacturing environment, the new frontier in robotics will depend on incorporating biological principles into robotics. This will endow robots with some of the advantages inherent in biological systems. The Biological Robotics At Tulsa (BRAT) Research Group seeks to identify the principles that make biological systems successful, describe these principles using engineering methods, and exploit these principles in engineered devices. Current work in the research group focuses on several topics: the first is in soft anthropomorphic hands. The human hand has 23 degrees of freedom, with the actuators (muscles) located far from the joints. Nevertheless, very few of those conceivable motions are actually used in practice. The BRAT group seeks a principled method of underactuating a hand so that the motions of which the hand is capable correspond to the motions used most often in tasks of everyday living. This is important because fully actuated hands are complicated, heavy, and expensive. By constructing an underactuated hand so that each actuator corresponds to a useful motion primitive, the majority of useful human poses can be built up by superposition. The actuator-to-tendon excursion mapping is enforced by an elastic transmission mechanism. This keeps the hand lightweight, with a small number of communication channels, making it suitable as a prosthetic device. The second topic is the science, construction, and behavior of artificial muscle-like actuators. Most researchers agree that to be considered an ``artificial muscle,'' actuators must be ``soft,'' or possess inherent elasticity. Certainly elasticity is an important characteristic of muscles, but its discrete nature (muscles are composed of 8 motor units, groups of fibers innervated by a particular motor neuron) is equally important. Failure of a single muscle fiber or motor unit does not entail failure of a particular joint. The BRAT lab is working on fundamental understanding of actuation systems where numerous small actionable units combine their individual efforts to produce motion. Control is performed by recruiting individual units into the active state. Investigation is underway to find relationships between the characteristics of the individual units, their spatial arrangement, and the static and dynamic performance of the actuator built up from these units. This biologically inspired actuation and control paradigm will lead to highly reliable prosthetic and orthotic actuation systems that are failure tolerant. The BRAT group is also working on novel medical devices to improve reliability and patient outcomes. Under development is a bone marrow biopsy needle driver that will be capable of logging force and torque data throughout the procedure, potentially leading to better understanding of hematology-oncology disorders. It also provides torque assistance with a haptic feedback to the clinician. The researchers in the BRAT group believe that this will lead to fewer failed (read repeat) procedures. A companion benchtop haptic environment is being constructed which will allow providers to learn the procedure in a simulated environment before attempting to perform a biopsy on an actual patient. Speaker’s Bio: Joshua Schultz was born and spent most of his childhood in New England, but also lived in the Midwest, Belgium, and Equatorial Africa. He attended Tufts University, receiving his Bachelor's degree in Mechanical Engineering in 2002. Joshua studied abroad at the Institut National des Sciences Appliques in Lyon, France his junior year. He received his Master's degree in Mechanical Engineering from Vanderbilt University in 2004, working on pneumatic control for a performance-enhancing exoskeleton as part of a DARPA-funded project. From 2004-2008, Joshua worked for Lexmark International on mechatronics and motion control systems for new laser printer products. Following that, Joshua attended the Georgia Institute of Technology, performing his thesis research on discrete, compliant, muscle-like actuator for a biologically inspired camera positioner as part of an NSF-funded project. He was awarded the ARCS scholarship in 2011 and received the Ph.D. degree in 2012. In 2012/2013, Joshua was a postdoctoral fellow at the Istituto Italiano di Tecnologia, working on discretized variable impedance actuators for the European Research Community 7th Framework Programme Softhands project. He joined the faculty of the University of Tulsa in 2013, where he directs the Biological Robotics At Tulsa (BRAT) research group. The BRAT group performs research in the area of biologically inspired grasping and manipulation, soft, muscle-like actuators, and intelligent medical devices. Speaker #9: Prof. Luis Sentis, University of Texas at Austin Speaker’s Bio: Luis Sentis is an Assistant Professor in the Department of Mechanical Engineering at The University of Texas at Austin since January 2010. Between 2007 and 2009 he was a Postdoctoral Fellow at Stanford University. He received his Ph.D. in 2007 from Stanford University and his B.S. (Honors Thesis) from the Polytechnic University of Catalonia (UPC) in 1996. He worked as a Control Engineer in Silicon Valley between 1996 and 1998. He was a recipient of the La Caixa Fellowship given by the Catalan Government to pursue 2 years of Graduate Studies at Stanford. In Austin, he directs the Human Centered Robotics Laboratory, where his research focuses on characterizing, controlling and building humanoid robots. The control methods he has developed have been used in some of the most advanced humanoid robots such as the Meka Humanoid Robot and simulations of the Honda Asimo Humanoid robot. At the University of Texas at Austin, he conducts research on algorithms for the compliant skills of humanoid robots, design of mechanical and embedded hardware for humanoid systems, and 9 biomechatronics. He has created a new class called Topics in Human Centered Robotics to explore foundations and applications of robots for the assistance and augmentation of humans in their daily lives. He is co-designer of the open-source software architecture, the Compliant Whole-Body Control Framework which endows complex compliant skills to humanoid robots. He is recipient of Funding Awards by the Office of Naval Research, the NSF National Robotics Initiative, and the DARPA Robotics Challenge. Speaker #10: Prof. James Sulzer, University of Texas at Austin Abstract: Physical rehabilitation following neuromuscular insult such as stroke focuses primarily on the limbs despite the source of the problem in the brain. As a result, we cannot be certain that rehabilitation is facilitating positive improvements or compensatory mechanisms that may inhibit fuller recovery. One main line of my research focuses on developing neurally guided methods of neurotherapy by observing brain activity in specific regions in vivo using functional magnetic resonance imaging (fMRI). This online fMRI, known as real-time fMRI allows biofeedback applications where the patients can potentially learn to control region- and network-specific activity to ensure that neuroplasticity is properly guided. I will discuss my approaches in this direction. While neurotherapy is advancing, we still require more immediate solutions to impairment, i.e. assistive technology. The second line of my research involves the development of an impairment specific robotic exoskeleton to assist gait in people with Stiff-Knee gait (SKG) following stroke. Initial attempts proved that neuromuscular discoordination must be accounted for as well as weakness and spasticity. Our goal is to first model the impaired neuromusculoskeletal system, and then device the optimal assistance that can restore healthy gait in those with SKG. Speaker’s Bio: Dr. Sulzer is an assistant professor at UT Austin and the PI of the Rewire (REhabilitation With Insight from Robotics and Engineering) Lab in the Department of Mechanical Engineering. His research involves the intersection of robotics and neuroscience for the purpose of developing novel interventions following neurological injury such as stroke. He received his PhD from Northwestern University and the Rehabilitation Institute of Chicago in 2009 on lower limb exoskeletons and completed a postdoc at the Swiss Federal Institute of Technology, Zurich in 2013 researching fMRI-based neurofeedback. Prof. Sulzer hails from Cleveland, Ohio. 10 Frontier Session: Frontiers of Dynamics and Control in Medicine (TA8) Time: Thursday, Oct. 23, 2014, 10:00 am – 12:00 pm Location: Cavalier Organizer: Prof. Rajesh Rajamani, University of Minnesota - Twin Cities This session brings together six speakers working on leading-edge applications of dynamics and control in medicine and surgery. The six talks in this session will be presented individually by the PIs themselves. They provide a great illustration of how dynamic modeling, estimation and control are enabling new frontiers in health care Speaker #1:Prof. Robert J Webster, Vanderbilt University Title: Is a Robot Through Your Urethra Really A Good Idea? Abstract: If you have Benign Prostatic Hyperplasia (BPH) and the right kind of robot, the answer is a resounding yes! This talk will describe a new kind of robot that can help the surgeon remove prostate tissue less invasively and more rapidly, bringing a laser-based procedure with proven clinical benefits to many more patients. The robot is a hand-held device that delivers two concentric tube manipulators through an endoscope to retract tissue and dissect it with a laser. The talk will cover the design of the robot and experiments using it to resect tissue. Speaker #2:Prof. Hashem Ashrafiuon, Villanova University Title: EEG Signal Processing for Alzheimer ’s Disease Diagnosis Abstract: Alzheimer's disease (AD) is the most common form of dementia, affecting millions of Americans over the age of 50 and the numbers continue to grow as life expectancy increases. AD is a progressive neurodegenerative disease affecting the brain regions associated with memory and executive functions. Given that the current therapies delay onset of symptoms of the disease, early detection and differentiation of AD from normal aging processes are critical for effective treatment strategies. Quantitative analysis of the human brain electroencephalography (EEG) recordings as a tool to aid with the diagnosis of brain injuries and disorders is considered to be a potential tool that may aid in early diagnosis of Alzheimer’s disease. In this presentation, I will review a variety of techniques including discrete and continuous wavelet transform methods, and stochastic nonlinear dynamic analysis which we have employed to analyze EEG signals recorded from human brain. I will also introduce the utilization of statistical analysis and decision support tools for EEG discriminant identification followed by a discussion of the quantitative and qualitative differences between EEG signals from AD patients and age-matched healthy normal subjects. In general, our study has resulted in identification of many reliable EEG discriminants of AD patients, some of which have been previously reported and some which are introduced for the first time. Our goal is to follow this study with a much larger AD study and to extend the approach to study other brain disorders and injuries such as concussion. Speaker #3:Dr. Vincent Chan, Oxbridge Biotech Roundtable Prof. Harry Asada, MIT Title: Bio-Fabrication and Optogenetic Control of Bioartificial Muscle for the Development of Locomotive Bio-Bots 11 Abstract: The quest to engineer biological robots remains a grand challenge. Cells and tissues can be used as components of a robot. For example, skeletal and cardiac muscle cells have the potential to be effective actuators for powering these robots. Such live biological materials will be a game-changing technology in designing robotic systems and extending their applications to the bio-systems and healthcare fields. This talk will introduce the development of locomotive “bio-bots” by 3D printing muscle cells on hydrogel constructs. The bio-bots consist of a ‘biological bimorph’ cantilever structure as the actuator to power the bio-bot and a base structure to define the asymmetric shape for locomotion. The muscle cells are genetically altered so that each muscle strip can be controlled individually with high spatiotemporal resolution using "optogenetics". When exposed to light, a group of light-sensitive muscle strips contract locally and dynamically, creating multi-DOF motion in a compact body. A new fabrication technique will also be introduced for scaling up the bio-artificial muscles to a large-scale functional muscle. Speaker #4:Prof. Jin-Oh Hahn, University of Maryland Title: Control Algorithms and Test Bed for Automated Critical Care System Abstract: The transport of critically ill casualties requires the highest level of intensive care, including the administration of a multitude of medications to resuscitate and stabilize the casualty. In today’s clinical practice, medication dose is adjusted by human clinician, which makes it very difficult to optimize it against large inter-individual dose-response variability. The automated critical care system (ACCS), a deployable closed-loop control and decision-support system that can autonomously monitor and sustain casualties, may serve as a future vehicle to ensure quality monitoring and treatment by eliminating the challenges associated with the current manual dose adjustment practice. In this presentation, we discuss two outstanding challenges that hamper translation and deployment of ACCS capabilities: (1) adaptive personalized control of medication therapy for optimal balance between performance and robustness of control systems, and (2) high-fidelity model-based simulation that reproduces physiologic responses to critical care medications as cost-effective approach to validate emerging ACCS capabilities. We review the state-of-the-art, and outline our effort to exploit data-driven, hybrid physicsbased/phenomenological dose-response models as a viable platform to tackle the challenges. Speaker #5:Prof. Jongeun Choi, Michigan State University Title: Patient-Specific Model Calibration Abstract: To successfully translate systems and control paradigms into individualized medicine, a physiology-based, mathematical model needs to be selected and calibrated from available data sets for each patient. A calibrated model for a patient can be used to make a prediction with a high confidence level for decision-making as well. However, model calibration of a human physiological process in a patient-specific way is very challenging due to lack of observations with respect to unknown multiple model parameters. In this talk we will present two different approaches: A1) a traditional system identification approach to a reduced-order model, and A2) a Bayesian approach to take into account prior distributions of model parameters and various sources of uncertainties. These two approaches will be demonstrated via recent results from two NIH funded research projects. In particular, the first part (A1) of the talk will be on the time-domain optimal experiment design in human postural control testing. The second part (A2) of the talk will be about the prediction of abdominal aortic aneurysm (AAA) expansion using Bayesian calibration of a growth and remodeling (G&R) computation model. Some challenges and future research directions will be discussed. Speaker #6:Prof. Rajesh Rajamani, University of Minnesota 12 Title: Flexible Smart Skin for Medical Applications Abstract: This talk presents research aimed at developing flexible instrumented sensor sheets, or “artificial skin” that can be useful in a number of robotic and biomedical applications. The sensors on the skin will be capable of configuration to measure tissue stiffness, Young’s modulus, shear modulus of elasticity, tension in taut soft tissues, pressure inside in-vivo compartments, and tactile force distribution. The artificial skin can be used on minimally invasive medical instruments and will play a valuable role in improving a number of diagnostic and surgical medical procedures. These include minimally invasive surgery for precise removal of brain cancer tissues, open surgery orthopedic applications such as knee implants and hip implants, non-invasive diagnosis of compartment syndrome, and natural orifice applications such as in urethral catheters for diagnostic analysis of urinary incontinence. 13 Special Session: Frontiers in Building HVAC Controls (TM8) Time: Thursday, Oct. 23, 2014, 1:30 pm – 3:30 pm Location: Cavalier Organizer: Prof. Yaoyu Li, University of Texas at Dallas For commercial and residential buildings, the heating, ventilation and air conditioning (HVAC) systems account for a significant portion of energy consumption worldwide. Dynamic modeling, control and optimization can play a critical role for efficient operation of building HVAC systems. However, this is challenged by the inherent complexity of such systems, such as nonlinear, distributed and time-varying characteristics of the thermo-fluid processes in equipment and building physics, dramatic variations in ambient conditions and internal thermal loads, uncertain occupant behavior, manufacturing variations and degradation of systems and components, low investment in commissioning and maintenance, among others. More recently, renewable penetration and smart grid have further complicated such problems. The past decade has observed dramatic growth of research efforts in this area from both academia and industry. In this session, five experts in building HVAC controls, three from academia and two from industry, will bring the audience the frontier research outcomes of several critical topics in this area, from dynamic modeling and control of HVAC equipment, cyber-physical simulation platform, distributed predictive control for building HVAC systems, dynamic optimization of building efficiency with integration of energy storage and smart grid. The speakers will share their visions for the practical challenges and research opportunities for various aspects of building HVAC controls. Keynote Speech Dynamical Modeling and Control for Building HVAC systems Dr. Andrew Alleyne Ralph M. and Catherine V. Fisher Professor Department of Mechanical Science and Engineering University of Illinois at Urbana-Champaign Abstract This talk starts with a broad overview of modeling and controls challenges associated with the transient thermal systems present in Building HVAC systems. The strong energy efficiency motivation is presented along with additional motivations based on interactions with the surrounding power grid. Subsequently, we discuss specific challenges for building HVAC systems starting at the lower level issues associated with equipment control and then transitioning to the overall building systems level. At the lower level, we examine specific dynamical system models associated with HVAC equipment along with control algorithms that can be used to exploit the knowledge gained from these models. At the building systems level, we explore the role of control architecture and its impact on the overall system performance for meeting comfort requirements whilst minimizing energy usage or overall system cost. A summary describes the richness of these dynamical systems that are ready for contributions from the broader Dynamics and Controls community. Speaker’s Biography Professor Alleyne received his B.S. in Engineering Degree from Princeton University in 1989 in Mechanical and Aerospace Engineering. He received his M.S. and Ph.D. degrees in Mechanical 14 Engineering in 1992 and 1994, respectively, from The University of California at Berkeley. He joined the University of Illinois, Urbana-Champaign in 1994 where he currently holds the Ralph M. and Catherine V. Fisher Professorship in the College of Engineering. He was awarded the ASME Dynamics Systems and Control Division’s Outstanding Young Investigator Award and was a Fulbright Fellow to the Netherlands where he held a Visiting Professorship in Vehicle Mechatronics at TU Delft. He is the recipient of the 2008 ASME Gustus L. Larson Memorial Award and is also a Fellow of ASME. His research interests are a mix of theory and implementation with a broad application focus. He has been active in the ASME, the IEEE, and several other societies. Additionally, he has been active on several boards including the Scientific Advisory Board for the U.S. Air Force. Further information may be found at: http://arg.mechse.illinois.edu Speaker #1: Prof. Michael Baldea, University of Texas at Austin Title: Integrated Scheduling and Control of Thermal Energy Storage for Buildings Abstract: Buildings with active thermal energy storage (TES) are complex systems, and the effective use of the TES facilities requires a control system with predictive and optimization capabilities. We propose using Economic Model Predictive Control (E-MPC) for the optimal control of a building Heating, Ventilation, and Air Conditioning (HVAC) system combined with TES. The E-MPC formulation must consider a relatively long prediction horizon to fully benefit from extended disturbance forecasts (e.g., weather, energy prices). This, together with a multiple time scale behavior of the building and the need to account for discrete decisions (related to the states and operating modes in the HVAC and TES systems), lends considerable computational complexity of the E-MPC problem. Motivated by this, we propose a novel hierarchical E-MPC structure based on (i) solving a dynamic scheduling problem in the slow time scale, which aims to establish the economically optimal operation of the TES, and (ii) addressing control objectives in the fast time scale (e.g., comfort levels and indoor air temperature) using a moving-horizon control scheme with a shorter prediction horizon. We illustrate these concepts using a case study concerning the use of TES at the Thermal Façade Laboratory of The University of Texas at Austin. Speaker’s Bio: Michael Baldea is Assistant Professor in the McKetta Department of Chemical Engineering and Affiliated Faculty in the Institute for Computational Engineering and Sciences (ICES) at The University of Texas at Austin. He received his Diploma (2000) and M.Sc. degree (2001) in Chemical Engineering from "Babes-Bolyai" University in Cluj-Napoca, Romania and obtained a Ph.D. in Chemical Engineering from the University of Minnesota in 2006. Prior to joining The University of Texas, he held industrial research positions with Praxair Technology Center in Tonawanda, NY and GE Global Research in Niskayuna, NY. He has received several research and service awards, including the Moncrief Grand Challenges Award, the ACS Doctoral New Investigator award, the Model-Based Innovation Prize from Process Systems Enterprise and the Best Referee Award from the Journal of Process Control. His research interests include the dynamics, optimization and control of process and energy systems, areas in which he has co-authored one book, three book chapters and over 50 peer-reviewed journal and conference articles. Speaker #2: Dr. Scott A. Bortoff, Mitsubishi Electric Research Laboratories Title: Challenges in Modeling and Control of Vapor Compression Systems Abstract: Control of HVAC equipment is an important problem for two reasons. First, HVAC systems consume a significant amount of primary energy worldwide, accounting for approximately 30% of energy consumptions in commercial and residential buildings in North America, which in turn consume 15 about 30% of all primary energy. Obviously this accounts for a significant amount of CO2 production worldwide. Second, control systems have significant and increasing authority over the equipment energy efficiency. This is true because of the introduction of variable speed compressors, variable speed fans and use of electrically operated expansion valves. Unfortunately both modeling and control of these systems is viewed too narrowly in the academic and professional literature. This talk will start by articulate some of the requirements of a control system that are often outside the scope of existing research in this field, yet because they render the control design problem more rich, deserve more attention. First, of course, the control system must regulate certain variables of interest, such as room temperature. Second, the control system must enforce system constraints on temperatures and pressures which protect the equipment and also improve comfort. Sometimes these are time-varying. One constraint that is very challenging is on preventing mal-distribution of refrigerant in evaporators. This constraint exists because, when mal-distribution occurs, excess water can condense on the coils and water droplets can become entrained in the airstream, which is not desirable. Other constraints involve high and low temperatures and pressures some of which are measured and some of which are not. The control system must also provide start up and shut down logic, must switch among modes of operation like heating, cooling and dehumidifying, and must provide diagnostics, some of which are actionable and are therefore forms of hybrid feedback. And it must be applied to a broad variety of product configurations and must be calibrated in the factory. Given this array of requirements, many gaps appear in both modeling tools and also methods of control system design and validation. This talk will also highlight some of these needs, many of which are of sufficient caliber to warrant significant and deep research. Such problems include correct modeling of some physics such as mal-distribution and 2 phase flow, model reduction, incorporation of uncertainty in models to allow for robust control system design, hybrid control system design and validation, and model integration with building-level models. Speaker’s Bio: Scott A. Bortoff is the Group Manager for Mechatronics at Mitsubishi Electric Research Laboratories. He manages a group of 16 researchers who focus on developing next generation control technologies for application to Mitsubishi Electric products including HVAC systems, Factory Automation products, space systems, automotive mechatronics and elevators. Prior to joining MERL in 2009, Scott worked at United Technologies Research Laboratory, where he managed the Control System Technology group and lead projects in Fuel Cell power plant modeling and control, HVAC system control and power system modeling and control. He was Associate Professor at the University of Toronto from 1992-2000 where he conducted research in nonlinear control and taught undergraduate and graduate courses in control. Prior to that he received his Ph.D. from the University of Illinois, and M.S. and B.S. degrees from Syracuse University, all in electrical engineering. Speaker #3: Prof. Bryan P. Rasmussen, Texas A&M University Title: Distributed Predictive Control of Building Energy Systems Abstract: Commercial building energy systems feature many interconnected systems with multi-time scale dynamics, and conflicting objectives. Most utilize building automation systems to centrally monitor the many sensors, and allow adjustment of control setpoints. Despite these sophisticated systems, decentralized, independent control strategies are standard practice. Maintaining a single highly detailed and accurate model of all system behaviors, or updating a centralized controller every time a component is replaced or reconfigured is generally infeasible. Likewise fully communicative distributed control approaches where every subsystem requires perfect knowledge of all other subsystems’ dynamics would place unrealistic demands on the communication and computation infrastructure. Determining a modular, flexible control approach that still achieves the optimality of a centralized control solution is critical to achieving a practical control solution for modern building systems. 16 This presentation provides an overview of recent efforts to construct predictive optimal control algorithms for building operations. The specific focus will be on distributed approaches that can provide the necessary scalability and modularity that is essential for practical implementation. Experimental verification on a lab-scale building HVAC system will demonstrate the potential of the proposed approach. Speaker’s Bio: Bryan Rasmussen received his B.S. degree magna cum laude in Mechanical and Aerospace Engineering from Utah State University in 2000. He was awarded M.S. and Ph.D. degrees in Mechanical Engineering from the University of Illinois at Urbana-Champaign in 2002 and 2005. Currently an Associate Professor of Mechanical Engineering at Texas A&M University, Prof. Rasmussen research focuses on dynamic modeling and control of building energy systems. He is also the director of the Industrial Assessment Center, a US Dept. of Energy program that trains students to conduct energy audits for industrial manufacturing facilities. He was awarded the NSF CAREER and the ASHRAE Young Investigator awards for research, and is the recipient of various teaching awards. He and his wife Holly are the proud parents of six children. Speaker #4: Dr. Hubertus Tummescheit, Modelon Inc. Title: Using Modelica for the System and Control Design, Modeling and Simulation, and Optimal Operations of HVAC and Energy Systems Abstract: Modelica is an open standard language for modeling of cyber-physical systems, that is increasingly used in many industries, in particular automotive, aerospace, and energy and process. It has been well established for transient simulation for a long time, but is finding new applications by coupling it to different types of solvers and analysis routines. One example is the coupling of Modelica to robust steady-state solvers for system design, using an evolution of the tearing algorithm to reduce the size of non-linear equation systems. A second example is using optimal control technologies for short term production planning for a district heating problem. The optimization is performed in two steps: the first step aims at solving the discrete variables from the unit commitment sub-problem (UCP) using standard mixed integer linear models and optimization techniques. The second step focuses on the economic dispatch sub-problem (EDP) described by high-fidelity, continuous time, physics-based Modelica models together with nonlinear optimization techniques from the JModelica.org platform. The output of the second step includes optimized power flows but also highly relevant variables such as supply temperature, supply flow rate, turbine by-pass valve in the cogeneration plant. The optimization is formulated as a maximization of the benefit from heat and electricity sell over a finite time-horizon. These examples demonstrate how Modelica models can be used throughout the system design phase and later during system operations, resulting in efficiency gains by using consistent and compatible models for all design steps. Speaker’s Bio: Dr. Tummescheit received his MSc in Mechanical Engineering from the Technical University of Hamburg Harburg, Germany in 1996, and his PhD in Automatic Control from the University of Lund, Sweden in 2002. He has been involved in the Design of the Modelica language from the beginning and is the developer of a number of open source and commercial Modelica Libraries in the energy and HVAC domains. In 2003 he worked as a research scientist at United Technologies Research Center and returned to Sweden in 2004 to start Modelon AB, the first company fully dedicated to tools and services based on Modelica. Dr. Tummescheit has served as the CEO of Modelon AB from 2004 to 17 2012 and moved to Hartford, Connecticut in 2013 to establish Modelon as a leading player in system simulation in the United States. 18 Frontier Session: Control Systems for Advanced Manufacturing: New Frontiers or Old Problems Retooled? (TP8) Time: Thursday, Oct. 23, 2014, 4:00 pm – 6:00 pm Location: Cavalier Organizers: Prof. Douglas Bristow, Missouri University of Science & Technology Prof. Kira Barton, University of Michigan at Ann Arbor Prof. David Hoelzle, University of Notre Dame Prof. Sandipan Mishra, Rensselaer Polytechnic Institute Prof. Robert Landers, Missouri University of Science & Technology Advanced manufacturing has once again become a “hot topic” research area, in part because of the recent large investments by the government in the National Network for Manufacturing Innovation and other large programs. Many of the arguments for these investments are economic. Although manufacturing has long been the cornerstone of the US economy, cheap foreign labor has resulted in offshoring US manufacturing for decades, at a rate greatly amplified during the great recession. The conventional wisdom is that low tech, labor intensive manufacturing cannot be sustainable in the US, but that high tech advanced manufacturing in the US can be competitive if the productivity gains are sufficient. Thus, automation and control systems are central to the economic argument. However, automation and control systems have long been an important element in advanced manufacturing research. So what, if anything, has changed over the past one or two decades about control challenges in advanced manufacturing? What progress has there been, and where does the future lie? A panel of experts from academe, industry, and government will present their perspectives of where control systems in manufacturing are and where they are headed, followed by a moderated question and answer session with the audience. Session Format: Two hour session structured as follows: (1 Hour) Individual presentations by each of the panelists. (1 Hour) Panel Q&A with questions from the audience. Speaker #1:Prof. Joseph J. Beaman, University of Texas at Austin Speaker’s Bio: Joseph J. Beaman is the Earnest F. Gloyna Regents Chair in Engineering at the University of Texas at Austin. Professor Joseph J. Beaman’s career work has been in design, manufacturing and control. His specific manufacturing research interest is in Solid Freeform Fabrication, a manufacturing technology that produces freeform solid objects directly from a computer model of the object without part-specific tooling or knowledge. Dr. Beaman coined this term in 1987. Professor Beaman initiated research in the area in 1985 and was the first academic researcher in the field. One of the most successful Solid Freeform Fabrication approaches, Selective Laser Sintering, was a process that was developed in his laboratory. In particular, he has worked with graduate students, faculty, and industrial concerns on the fundamental technology that span materials, laser scanning techniques, thermal control, mold making techniques, direct metal fabrication, and biomedical applications. Besides his work in Solid Freeform Fabrication, Professor Beaman has worked extensively with the special metals processing industry to develop next generation process control for remelting processes that are used to produce special metals alloys such as super alloys and titanium alloys. Professor Beaman has pioneered the use of high fidelity physics-based models in real-time manufacturing process control in order to estimate and control important outputs in these remelting processes. In many cases, it would not have been possible to estimate and control these outputs without detailed models of the processes. Dr. 19 Beaman is a Fellow of the American Society of Mechanical Engineers. He serves on the Army Science Board and Board of Directors of Society of Manufacturing Engineers and was Chair of the Department of Mechanical Engineering at the University of Texas from 2001 to 2012. He was elected to the National Academy of Engineers in February 2013. Speaker #2:Dr. Kevin Creehan, America Makes Speaker’s Bio: Kevin Creehan is America Makes’ Deputy Director for Technology Transition. America Makes exists to accelerate the development and transfer of additive manufacturing technologies to the nation’s manufacturing sector to increase U.S. manufacturing competitiveness. Prior to joining America Makes, Dr. Creehan was Co-founder and President of Aeroprobe Corporation, a small business focused on the development of a patented additive manufacturing process and the manufacturing of a suite of products for fluid measurement applications. Prior to founding Aeroprobe, Dr. Creehan was a faculty member in the Grado Department of Industrial and Systems Engineering at Virginia Tech, where he became the Director of the Center for High Performance Manufacturing. He earned his Ph.D. in Industrial Engineering from the University of Pittsburgh in 2001. Speaker #3:Dr. Lonnie Love, Oak Ridge National Laboratory Speaker’s Bio: Lonnie Love, is the group leader of Oak Ridge National Laboratory’s (ORNL) Manufacturing Systems Research Group. He has over 20 years of experience in the design and control of complex robotic and hydraulic systems. His primary expertise is in the areas of design, robotics, hydraulics and additive manufacturing. He is the project lead for the Big Area Additive Manufacturing (BAAM) program at ORNL that is focusing on large scale, high speed, low cost polymer and metal additive manufacturing. The program has partnered with Cincinnati Incorporated for commercialization and Local Motors for demonstration of the technology printing the first all-additive manufactured composite electric vehicle at the 2014 IMTS. Other focus areas include the development of an all additive manufactured hydraulic underwater robotic platform for the Office of Naval Research and an AM haptic interface for stroke recovery with Neuralutions. Lonnie was ORNL’s 2009 Inventor of the year, has over 30 invention disclosures and patents and 75 peer reviewed publications. He serves on the scientific advisory board for NSF’s Center for Compact and Efficient Fluid Power and is on the Medical and Scientific Advisory Board for OrthoCare Innovations. He is a proud sponsor and mentor for the FIRST Robotics Competition, working at the national level to introduce 3D printers and printed robotics to competition. Lonnie received his PhD from Georgia Tech in 1995. Speaker #4:Dr. Steve Ludwick, Aerotech Inc. Speaker’s Bio: Steve Ludwick is the Director of Mechatronic Research for Aerotech Inc, a manufacturer of precision automation equipment used in advanced manufacturing operations. He joined Aerotech in 1999, and is currently responsible for developing next-generation precision motion control systems with an emphasis on the interactions between mechanical, electrical, and algorithmic components of a design. Of particular interest is the development of techniques for predicting the dynamic performance of mechatronic systems. Following a B.S. degree in Mechanical Engineering from Carnegie Mellon University, he studied at the Massachusetts Institute of Technology and received a doctorate in Mechanical Engineering for research into high-dynamic machine tools. Since 2007, he has also taught as an adjunct faculty member at the University of Pittsburgh. Speaker #5:Prof. A. Galip Ulsoy, University of Michigan, Ann Arbor 20 Speaker’s Bio: A. Galip Ulsoy is the C.D. Mote, Jr. Distinguished University Professor of Mechanical Engineering and the William Clay Ford Professor of Manufacturing at University of Michigan, Ann Arbor. He received the Ph.D. from University of California at Berkeley (1979), the M.S. degree from Cornell University (1975), and the B.S. degree from Swarthmore College (1973). His research interests are in the dynamics and control of mechanical systems. He has received numerous awards, including the American Automatic Control Council's 1993 O. Hugo Schuck Best Paper Award, the 2003 Rudolf Kalman Best Paper Award from the J. Dynamic Systems, Measurement and Control, the 2008 Albert M. Sargent Progress Award from the Society of Manufacturing Engineers (SME), the 2008 Rufus T. Oldenburger Medal, the 2013 Charles Russ Richards Award from the American Society of Mechanical Engineers (ASME) and the 2014 Hideo Hanafusa Outstanding Investigator Award in Flexible Automation. He is a member of the US National Academy of Engineering, received the 2012 Presidential Special Award from the Scientific and Technological Research Council of Turkey, and is a Fellow of ASME, SME, IEEE and the International Federation of Automatic Control (IFAC). 21 Special Session: Automotive Industry Perspectives (FA8) Time: Friday, Oct. 24, 2014, 10:00 am – 12:00 pm Location: Cavalier Organizer: Prof. John Ferris, Virginia Tech This session on Automotive Industry Perspectives specifically targets research being conducted within the automotive industry. The presentations are provided by researchers in the automotive industry for researchers in the automotive industry. The goal is to encourage active industry participation so that automotive researchers have a clear voice among university researchers about the challenges faced in industry and the creative solutions that they have developed. Speaker #1: Dr. Hussein Dourra, Chrysler Group LLC Title: Multi-Physics Real-Time Engine Models Abstract: High customer demand, challenging regulations and strong competition are creating new and challenging requirements. Designing controls for such requirements will require innovative approaches, reaching out for new technologies, creating physics based solutions, minimizing system calibration, and improving speed to market. This paper will discuss such requirements and approaches, specifically, Model-based developments, advanced controls techniques, and simulation. In order to achieve such solutions, plant models that characterize the system are required. There are many different types of powertrain plant models available (empirical and physics based) which can be used in model-based development. The challenge is how to run such models with high fidelity in a real time application. A balance between plant model detail and computing processor power needs to be established. Such models will lead to Physics based solutions and advanced controls approaches such as Linear Quadratic Regulator (LQR) and Model Predictive Control (MPC). The result is an improved final product and minimized calibration effort with reduced cost. Speaker’s Bio: Dr. Dourra has over 30 years of experience in system design and controls, 22 US patents, 5 international patents, and 18 technical publications. Dr. Dourra leads the Advanced Powertrain Controls team at Chrysler; he is the inventor of double swap transmission shift control utilized in Chrysler FWD 6 speed transmission. Dr. Dourra received the Technical Fellow title in April 2008. In May 2013, he was named the Sr. Tech Fellow for Chrysler PT controls, the first engineer to receive this title at Chrysler. Dr. Dourra teaches graduate level courses related to system controls at several universities. His education background includes a Bachelor Degree in Electrical Engineering, a Master Degree in Electrical and Computer Engineering, a Master Degree in Business Administration and a Ph.D. in Electrical and computer engineering. Dr. Dourra is well known internationally, presented as a keynote speaker in multiple symposium and conferences. He was awarded the SAE Edward Cole Award in 2012 and SAE McFarland Award in 2013. Speaker #2: Dr. Edmund Hodzen, Cummins Inc. Title: Advanced Control Techniques for Embedded Controls Speaker #3: Dr. Nikhil Ravi, Bosch Title: Advanced Battery Management Systems at Bosch – Towards Electrification of Transportation Speaker’s Bio: Nikhil Ravi is a Research Engineer at the Robert Bosch Research and Technology Center in Palo Alto. He is an expert in the field of automotive engine control, and has several years of experience 22 working on modeling and control of advanced combustion modes such as Homogeneous Charge Compression Ignition (HCCI). In addition, he also worked on model development for batteries, developed a hybrid powertrain vehicle model with advanced combustion technologies and evaluated synergies between advanced combustion and hybridization. In 2013 he was awarded the Rudolf Kalman best paper award by the ASME Journal of Dynamic Systems, Measurement and Control for his work on HCCI engine modeling and control. He obtained a Bachelor’s degree in mechanical engineering from the Indian Institute of Technology-Delhi and his MS and Ph.D degrees in the same discipline from Stanford University. He is a recipient of the Stanford Graduate Fellowship and the Indian Institute of TechnologyDelhi Silver Medal. Speaker #4: Drs. Hassene Jammoussi and Imad Makki, Ford Motor Company Title: Adaptive Controls in the Presence of the UEGO Six-Pattern Faults Abstract: Fault monitoring of the upstream universal exhaust gas oxygen (UEGO) sensor, as mandated by California air resources board (CARB), is a necessary action to maintain the performance of the operation of the air-fuel ratio (AFR) control system and indicate the need for maintenance when a fault is present and which could potentially lead to exceeding the emissions limits. When the UEGO sensor fault is accurately diagnosed, i.e. fault is detected, direction is identified and magnitude is estimated, tuning of the controller gains can be performed accurately with minimal calibration efforts. A control strategy has been developed that utilizes the type, direction and magnitude of fault to adapt the gains of the controller and the parameters of the Smith predictor (SP) in order to maintain the stability of the AFR control system. The proposed approach has been validated on a vehicle (Mustang V6 3.7L) equipped with ATI No-Hooks rapid prototyping system. Different fault types and magnitudes were tested and the tailpipe emissions were assessed on federal test procedure (FTP) cycles. The current presentation will cover the adaptive controls part including both the methodology and the experimental results. Speaker’s Bio: Dr. Hassene Jammoussi obtained his PhD in 2011 in Mechanical Engineering from University of Houston. He obtained his MS in 2006 in Computational Mechanics, and BS in 2006 from “Ecole Polytechnique de Tunisie”. He is now a research engineer at Ford Motor Company Research and Innovation Center. His areas of research include automotive system identification, diagnostics and adaptive controls. Dr. Imad Makki received his Ph.D. in 1995 in Electrical Engineering from Wayne State University in Detroit, Michigan. He is a technical expert at Ford Motor Company Research and Innovation Center. Dr. Makki funded and managed multiple research collaboration programs with several universities throughout the US. Dr. Makki’s areas of research mainly include diagnostics, prognostics, and adaptive controls for automotive systems. Speaker #5: Dr. Heather Bobbitt, General Motors Company Title: Developing Improved Design Solutions with High Speed F&M Testing, with focus on Chassis Controls, Vehicle Dynamics & Driveline Systems 23 Special Session: Smart Energy, Cyber Security, and Advanced Manufacturing at SwRI (FM8) Time: Friday, Oct. 24, 2014, 1:30 pm – 3:30 pm Location: Cavalier Organizer: Dr. Sean Mitchem, Southwest Research Institute For almost 70 years Southwest Research Institute has contributed significantly to the improvement of our world through innovative science and engineering. Scientists and engineers at all career levels contribute significantly to Institute projects, with many leading research starting in the early stages in their careers. In this session, up-and-coming and established researchers from Southwest Research Institute will discuss some of their interesting research into developing technology for a better world in areas such as integrating electric vehicles into microgrids, managing reliability on the grid using electric vehicles, securing the next generation of wireless technologies, protecting the next generation of intelligent cars from cyber-attacks, developing new robotics technologies for manufacturing, defining open-source manufacturing methods, and detecting cyber-attacks on GPS-enabled smart grid sensors. Speaker #1: Ms. Yaxi Li, Smart Energy Technologies, SwRI Title: Megawatts on Wheels – Bi-Directional Grid Support through DC Fast Charge Electric Vehicles Abstract: In September last year, Southwest Research Institute successfully implemented an electric vehicle aggregation system for the government's SPIDERS project (Smart Power Infrastructure Demonstration for Energy Reliability and Security) at Fort Carson Army base, Colorado. It is the first time an electric vehicle aggregation system (aggregator) has monitored and controlled bi-directional DC fast charging of electric vehicles compliant with SAE J1772 combo standard. As an essential part of a smart microgrid, the aggregator provides the microgrid control unit with a current and simple picture of the EV fleet’s grid supporting capabilities as if the fleet were just one energy storage unit; following the microgrid control unit’s commands, the aggregator intelligently dispatches variable charge or discharge power and reactive power commands to individual EVs tailored to their operation modes and use schedules. The software architecture of the aggregator focuses on distributed vehicle management that is secure, reliable and self-healable. Speaker’s Bio: Ms. Liu is a Research Analyst in the Smart Energy Technologies Group at Southwest Research Institute. Her research interests are electric vehicle and smart grid technology, as well as cyber physical security. Ms. Liu had played a pivotal role in the successful completion of two electric vehicle and smart grid integration projects recently. She had also designed a software system in computer simulation that monitored and controlled operations of a smart micro grid installation in Fort Leonard Wood, Missouri. Before joining Southwest Research Institute, Ms. Liu worked at Sandia National Laboratories and Alcatel-Lucent Corporation on embedded systems and security modeling. Ms. Liu has dual Master degrees in Computer Science and Broadcast Journalism. Speaker #2: Mr. Gerardo Trevino, Smart Energy Technologies, SwRI Title: Using Electric Vehicles for Fast Response Regulation Services Abstract: Discover how the Southwest Research Institute used a commercial off-the-shelf softwaredesigned controller to monitor grid frequency at 40 Hz and control electric vehicle chargers within 30 cycles. With this system, the client became the first electric vehicle fleet qualified to bid on the Energy Reliability Council of Texas ancillary services electricity market. 24 Speaker’s Bio: As a research engineer for Southwest Research Institute® (SwRI®), Gerardo Trevino plays a crucial role in the development of smart energy technologies. Gerardo joined SwRI in 2011, with a Master of Science and Bachelors in Electrical Engineering from The University of Texas at San Antonio (UTSA). While at UTSA, he assisted the university in winning a total of $2.3 million dollars in grants from the Texas State Energy Conservation Office (SECO) for three large solar panel installations on the campus, which he later used to conduct research on energy monitoring, electric vehicle charging, and data collection. His involvement in these projects led him to a summer internship with the National Renewable Energy Laboratory (NREL) where he helped develop a smart charger prototype for a plug-in hybrid electric vehicle. From this research he co-authored a technical paper relative to electric vehicle smart charging control that was accepted and published in the Systems Journal of the Institute of Electrical and Electronics Engineers (IEEE). Since joining SwRI, Gerardo has provided support on a number of projects analyzing the security of smart grid devices and developing new the power system technologies for utility clients. He has also developed ground support equipment (GSE) including data acquisition and control systems for two different satellite space missions. He received the first place for the IEEE and Center for Commercialization of Electric Technologies (CCET) student paper contest, received the Green Engineering Grant from National Instruments and earned the Latino Leaders Magazine Maestro Award for Innovation. Speaker #3: Mr. Jake Casey-Snyder, Smart Energy Technologies, SwRI Title: Fighting Back GPS Attacks: Clock Security for Phasor Measurement Units Abstract: The phasor measurement unit (PMU) has become a valuable asset in measuring the electric grid. The data collected from these devices require a common time source, and GPS is the best solution for these geographically separated units. However, GPS is low power and unencrypted, creating a vulnerability to be exploited. Southwest Research Institute has developed methods to detect and mitigate attacks on GPS from affecting PMU measurements. Speaker’s Bio: Jake Casey-Snyder is an Engineer in the Smart Energy Technologies Group at Southwest Research Institute where he has worked on several projects involving the smart grid. These projects include synchrophasors, cyber security, controls, and signal processing. Jake Casey-Snyder is a Graduate of Texas Tech University with a B.S. in Electrical Engineering. Speaker #4: Mr. Russell Barker, Embedded Systems Security, SwRI Title: Hack’n Stacks Abstract: Wireless security is a growing concern in today's “Internet of Things”. With more and more users demanding interoperability, security can be over looked. To address this, techniques like fuzzing exist to help identify security flaws within systems. Southwest Research Institute has been adapting this technique for testing wireless embedded systems using various protocols such as ZigBee and Bluetooth Low Energy. We would like to share our internal research dedicated to investigating approaches to fuzzing the intermediate and lower layers of wireless protocols, with specific attention to the development of a generalized and adaptable approach that can be realized using low-cost, off-the-shelf tools. Speaker’s Bio: Mr. Barker has been at SwRI for over two years and is currently a Research Engineer in the Embedded Systems Security Group of the Intelligent Systems Department within the Automation and Data Systems Division. Mr. Barker graduated from Lamar University in Beaumont, TX with a Bachelor’s degree in Electrical Engineering. 25 Speaker #5: Ms. Marisa Ramon, Embedded Systems Security, SwRI Title: Anomaly Detection Methods for CAN-Capable Devices Abstract: In modern automobiles, computers and wireless devices are becoming increasingly prevalent. These devices and interfaces significantly increase the car’s attack surface area, making the modern automobile fertile ground for the same sort of malicious attacks that are associated with traditional computers. Security researchers have already compromised car electronic control units (ECUs) and made them execute arbitrary code. With arbitrary code execution and the control of wireless devices in the vehicle accomplished, traditional malware—like viruses and worms—is on the horizon. The objective of this presentation is to discuss an internal research program, performed by Southwest Research Institute, whose purpose was to investigate and demonstrate detection methods for compromised CAN devices. Speaker’s Bio: Ms. Ramon has been a SwRI for over nine years, initially as a student intern, and is currently a Research Engineer in the Embedded Systems Security Group of the Intelligent Systems Department. Ms. Ramon graduated from St. Mary's University in San Antonio, TX with a Bachelor's degree in Computer Engineering and a Master's degree in Electrical Engineering. Speaker #6: Mr. Ryan Wilson, Embedded Systems Security, SwRI Title: Case Studies in Embedded System Security Abstract: The Embedded System Security group in the Automation and Data Systems Division focuses on making technologies secure from cyber threats through techniques such as penetration testing, risk management, threat analysis, and by performing applied security research. We provide embedded and wireless security testing services for customers in the areas of automotive, smart grid, industrial control systems, railway control systems, mobile devices, and medical devices. Recent case studies on mobile device forensics and security of electric vehicle charging stations will be presented showcasing some of the tools and technical tasks involved in these efforts. Speaker’s Bio: Mr. Wilson has been at SwRI for over two years and is currently a Research Engineer in the Embedded Systems Security Group of the Intelligent Systems Department. Mr. Wilson graduated from Texas Tech University in Lubbock, TX with a Bachelor’s degree in Electrical Engineering. Speaker #7: Mr. Shaun Edwards, Manufacturing Systems, SwRI Title: Can Open Source do for Manufacturing What it did for the Internet? Abstract: Open source technologies are a core and vital component of the Web. They are utilized in every aspect of the web from development to production. It’s these technologies that allow a small startup to create a worldwide company with minimal capital investment. Startups compete against larger counterparts in areas in which large development efforts would otherwise represent a barrier to entry. What’s the equivalent in manufacturing? What are these open technologies? What are the benefits of open source manufacturing? What will open source driven manufacturing even look like? Open source technologies are beginning to be adopted by manufacturers. It’s just a matter of time before their use transforms manufacturing like it did the Web. Speaker’s Bio: Shaun Edwards is a Senior Research Engineer in the Robotics and Automation Engineering Section (RAES) at Southwest Research Institute (SwRI®). Mr. Edwards has over 9 years of experience conceptualizing, designing, and deploying robotics and automation systems. His roles range from technical team member to project manager. The systems vary from small turnkey systems to some of the largest robots in the world. Mr. Edwards is the founder and lead architect for the ROS-Industrial 26 open source program. The ROS-Industrial program aims to bring the power of ROS and open source to industrial robotics and automation applications. Mr. Edwards previous experience includes, embedded software developer, adjunct professor in robotics for St. Mary’s University, and visiting researcher at Willow Garage. Mr. Edwards received his Masters of Science in Mechanical Engineering from Case Western Reserve University. Speaker #8: Mr. Paul Hvass, Robotics and Automation Engineering, SwRI Title: Solving Advanced Manufacturing Challenges with Mobile Manipulation Abstract: Modern industrial robots have been utilized in a huge range of small- and medium-scale applications, but very large-scale problems such as those encountered in aerospace manufacturing, ship building, wind turbine manufacturing, and construction have seen limited adoption. A typical approach for large-scale solutions is to mount a standard manipulator on a gantry or rail system; however, this approach is often prohibitive because of cost, limited accuracy or inability to access complex structures and parts. To expand robotics for new large-scale advanced manufacturing applications requires fully integrated mobile manipulator systems that utilize remote position sensing of the end-effector to accurately operate over a large work envelope. A mobile manipulator solution moves the robot to the work instead of bringing the work to the robot. Speaker’s Bio: Paul B. Hvass, MSME, is a Senior Research Engineer in the Robotics and Automation Engineering Section at Southwest Research Institute. He is a champion at SwRI on the topic of Mobile Manipulation and is also the program manager for the ROS-Industrial Consortium Americas, a membership organization fostering the development of open source robot software for factory automation. Mr. Hvass has worked as a robot developer, tester, inventor, and advocate for advanced manufacturing technologies for the past ten years. Mr. Hvass’ role in extending mobile manipulation to industry included the development of a demonstration platform that integrated an off-the-shelf mobile base, manipulator, localization system, and control software. 27


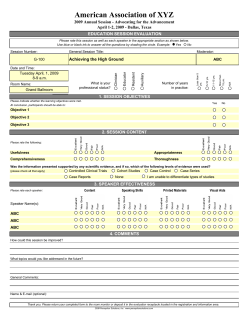







© Copyright 2026