
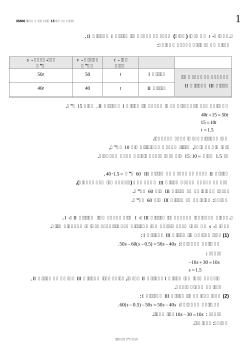
הטרנספורמציות הגיאומטריות
אלכס גולדוורד ולביא קרפ © 1 העתקות האלמנטאריות ( הגיאומטריות) 5 n העתקות הגיאומטריות הבסיסיות של המרחב הם הטלות אורתוגונאליות ,שיקופים וסיבובים. בפרק זה נדון במטריצות של הפעולות הנ "ל ,בקשרים ביניהם וכמובן גם בקשרים שביו הגיאומטריה ולמטריצות העתקה. נזכיר ,כי הנורמה במרחב n נקבעת ,כל עוד לא ציון אחרת ,על פי המכפלה הסקלרית הסטנדרטית. .1.5מטריצת הטלה אורתוגונאלית במרחב n 5.1.1 הטלה על תת מרחב חד ממדי נניח כי span a האורתוגונאלי של x Uכאשר a n וקטור נתון ב . לכל Px , x n זה ההיטל על תת המרחב .Uלפי מה שלמדנו בפרקים הקודמים , x aaT a aT a aT x aT a ( . Px )1 מכאן אנו רואים שמטריצת ההטלה היא aaT aT a דוגמה .1 אם ( .P )2 2 , a 1אז 3 2 4 2 6 1 1 .P 1 3 1 2 1 3 2 14 14 3 6 3 9 6.1.1 היטל על תת מרחב ממד גדול מאחד נניח כי ) Col(A Uכאשר A ליניארית .ההיטל של x n ניתן על ידי ˆ , Axכאשר Axˆ AT x T מטריצה . Aמכיוון שהעמודות של n k A ממשית אשר העמודות שלה בלתי תלויות ̂x זה פתרון של המערכת הנורמלית בלתי תלויות ליניארית ,אז rank(A) k ולכן אלכס גולדוורד ולביא קרפ © 2 מהזהות )rank(AT A) rank(A AT A אנו רואים שהדרגה של הפיכה .לכן ,ההיטל האורתוגונאלי AT x 1 Px T AT A היא k ומכאן שהמטריצה ניתן על ידי ( , Px Axˆ A A A )3 כלומר , AT הערה :אם 1 דוגמה .2 1 , kאז 2 a 1 aT a נתונה המטריצה פתרון :תחילה נחשב 1 A A T ( .P A A A 1 T )4 ואנו רואים ש ( ) 2זה מקרי פרטי ש (.) 4 1 2 . A 1 1מצא את מטריצת ההטלה על . Cal A 1 2 3 3 A 3 9 T . Aאז 1 3 3 18 3 9 1 AT A ו 1 2 1 0 1 9 3 3 12 3 1 1 .P 0 2 0 1 1 3 3 3 6 3 2 18 1 0 1 1 2 7.1.1 תכונות מטריצת ההטלה טענה .1 תהי א. ב. ג. הוכחה: א. AT P 2 1 P A AT A כאשר העמודות של .P T P Px xאם ורק אם ) . x Col(P .P A בלתי תלויות ליניארית .אז אלכס גולדוורד ולביא קרפ © 3 AT P 1 AT 1 AT A AT A AT A AT A 1 AT A AT A A AT A 1 P 2 A AT A . 1 ב. T T 1 1 P A AT A AT A AT A AT 1 T 1 A AT A AT A AT A AT P ג. T ניתן להבין תכונה זו גם ללא הוכחה פורמלית ,מכיוון שאם הווקטור הוא אינו משתנה על ידי ההטלה .ובצורה פורמלית , לכן אם P 2 , Pאז x ) x Col(P שייך ל ) , Col(Pאז אם ורק אם Pz . Px P 2z Pz x טענה .2כל מטריצה ריבועית P היטל אורתוגונאלי על ) . Col(P שמקיימת א. הוכחה :על סמך הגדרת ההיטל האורתוגונאלי צריך לכל () i ) Col(P () ii ) x Px Col(P P 2 ; Pב. x n PT P היא מטריצה של להראות : ; Px . הטענה ) (iברור שמתקיימת .לגבי ) , (iiלכל ) , y Cal(Pמתקיים לפי טענה y 1 y T Py PT x Px y 0T y 0 T T y x Px , Pyלכן x Px . T Px P 2x על סמך טענה 2נגדיר : הגדרה .1 .x כל מטריצה ריבועית , Pשמקיימת הטלה אורתוגונאלית. P 2 Pו PT P נקראת מטריצת אלכס גולדוורד ולביא קרפ © 4 טענה .3 אם ) Nul(P הוכחה :ברור ש P מטריצת הטלה אורתוגונאלית ,אז I P Qמטריצת הטלה על . Q T .Qכעת , I 2P P 2 I P Q ומכאן ש Qמטריצת הטלה על ) . Col(Qלפי טענה x Col(Q ) 1 . Px 0 x Px x Qx x 2 2 I P .Q אם ורק אם הערה :לכל הטלה I P , P הליניארית ומהעובדה ש Pסימטרית ,נקבל זה ההיטל על המשלים האורתוגונאלי .מהמשפט היסודי של האלגברה ) Nul(PT ) Nul(P דוגמה .3 ) . Col(P מצא את מטריצת ההיטל על המישור . x : 2x 1 x 2 3x 3 0 n פתרון :אפשרות אחת לפתרון היא למצוא בסיס של המישור וממנו לבנות מטריצה A ולאחר זאת T לחשב את מטריצת ההיטל לפי הנוסחה ( .) 4בדרך זו אנו צרכים להפוך את המטריצה A A ובנוסף לבצע כפל ביין שלוש מטריצות .פתרון פשוט יותר הוא להתייחס אל המישור כמשלים האורתוגונאלי של תת המרחב שנפרש על ידי הנורמל של המישור ,ואז אנו מחשבים את ההיטל על תת מרחב שנפרש על ידי הנורמל באמצעות הנוסחה הפשוטה ( , ) 2ולאחר מכאן אנו משתמשים בטענה .3ובכן ,הנורמל הוא 2 N 1וההיטל על span Nהוא 3 4 2 6 1 1 T .P NN 2 1 3 14 NT N 6 3 9 היטל על : 1 0 0 4 2 6 10 2 6 1 1 .Q I P 0 1 0 2 1 3 2 13 3 0 0 1 14 6 3 9 14 6 3 5 הגדרה .2 ( היפר מישור) :יהי N וקטור ב n . תת המרחב אלכס גולדוורד ולביא קרפ © 5 ( x n : NT x 0 )5 נקרא היפר מישור (או מישור ). מדוגמה 3אנו מסיקים : ההיטל האורתוגונאלי על היפר מישור עם נורמל NNT 1 T N N N ניתן על ידי ( .Q I )6 כעת נדון בקשר ביין הניצבות של שביין שני תתי מרחבים ומטריצות ההטלות שלהם. יהיו Uו Wשני תתי מרחבים ב טענה .4 n . יהיו P ו Qההטלות האורתוגונאליות עליהם בהתאמה .אז ( . PQ QP 0 W U הוכחה :נניח 0 0w 0 , PQאז לכל )7 u Uו w Wמתקיים ש w , Pu u Qw u P Q w u PQ w u T T T T T Qwולכן T ( . u w Pu )8 בכיוון השני ,אם , w Wאז מכיוון ש Uניצב ל ,Wאז ההיטל שלו על Uהוא אפס ולכן . Pw 0במיוחד כאשר w Qx באופן דומה משיגים שגם .QP 0 ומכאן ש PQx 0 לכל n , xכלומר 0 . PQ .2.5שיקופים מטריצת השיקוף מעתיקה וקטור xלשיקוף שלו ביחס למישור ,או תת מרחב אחר .נסמן את המטריצה הזאת ב R ונבדוק מה הן התכונות של המטריצה . R א .אם נשקף את הווקטור xפעמיים ביחס לאותו מישור ,אז נקבל בחזרה את אותו הווקטור , . R Rx xכלומר I 2 .R ב .אורך הווקטור אינו משתנה על ידי השיקוף Rx x , תכונה זו היא מטריצה אורתוגונאלית R RRT I : ג. .אנו יודעים שמטריצה שמקיימת T .R מהתכונות א ' ו ב ' אנו מקבלים RT I RT R2 RT R R R הגדרה .3 (מטריצת שיקוף) :מטריצה ריבועית Rכך ש R I T .R ושמקיימת אלכס גולדוורד ולביא קרפ © 6 ( R2 I RT T )9 נקראת מטריצת שיקוף. נבדוק כעת את הקשר שביין שיקוף להטלה .יהי R שיקוף ביחס למישור מישור .מכיוון ש , Rx xאז Rx , x , 0ו x Rx ) x 1 (Rxזה ההיטל האורתוגונאלי של 2 x Rx x 1 2 ? ואמנם ,אם הם קודקודים של מעוין .לכן האלכסונים שלו נציב לווקטור Rx x נחתכים בזווית ישרה ,כלומר הווקטור Rx x x ו P ההיטל על אותו . 21זה מצביע על כך ש על המישור . אנו צרכים לבדוק האם , yאז y T xT y Rx וזאת מכיוון ש R זה שיקוף וכעת y 0 T y 21 xT y Rx x Rx T טענה .5 א .אם ב. P מטריצת הטלה ,אז 1 2 y R 2P I אם Rמטריצת שיקוף ,אז R I 1 2 Rx x T 1 2 . x מטריצת שיקוף. P מטריצת הטלה. הוכחה :ברור ששתי המטריצות סימטריות. I א .צריך לבדוק האם מתקיים 2 ? Rואמנם ,מכיוון ש 4P 2 4P I I ב. צריך לבדוק האם מתקיים P R I P 2 4 P 2 2 2R I 2 , Pאז 2 I 2 . R 2P I ? Pואמנם ,מכיוון ש R 2 1 4 , Rאז R I 2 1 2 2 .P על סמך טענה 5אנו יכולים בקלות לחשב את מטריצת השיקוף על היפר מישור עם נורמל . Nלפי (, )6 ההיטל הוא NNT 1 T N N 2 I . Pלכן 1 2P I 2 I T NNT I I T NNT N N N N שיקוף ביחס ל היפר מישור : NT x 0 x n : .R אלכס גולדוורד ולביא קרפ © 7 NNT דוגמה .4 2 ( .R I T N N מצא את מטריצת השיקוף ביחס למישור פתרון :הנורמל 2 . N 1 3 )10 :2x1 x2 3x 3 0 3 x . אז 1 0 0 2 6 4 12 2 1 . R 0 1 0 1 2 1 3 4 12 6 14 0 0 1 14 3 12 6 4 דוגמה .5 נתונה המטריצה 1 2 2 1 . R 2 1 2 3 2 2 1 וודא ש R מטריצת שיקוף ומצא את תת המרחב שביחס אליו נעשה השיקוף. פתרון :ברור ש R סימטרית וחישוב מראה ש נעשה השיקוף אם ורק אם x I 2 . Rהווקטור x שייך לתת המרחב שביחס אליו אינו משתנה על ידי השיקוף .כלומר , ( . Rx x המשוואה ( ) 11מובילה למערכת משוואות R I x 0 )11 ,שזה שקול ל 2 2 2 0 2 0 . 2 2 2 2 2 0 אלכס גולדוורד ולביא קרפ © 8 1 . N 1 1 מכאן שהשיקוף הוא ביחס למישור עם נורמל הערה :אם הווקטור x x אינו משתקף ,כלומר , עם ערך עצמי . 1לפיכך ,אם R שיקוף הערכים העצמיים הם וקטור עצמי של מטריצת שיקוף ביחס למישור , אז כל וקטור שנמצא במישור הוא וקטור עצמי עם ערך עצמי . 1והנורמל למישור 1 מקיים את המערכת ( , ) 11אז x R N הוא וקטור עצמי עם ערך עצמי . 1למטריצת ו . 1 .3.5סיבובם מטריצה ריבועית A היא מטריצת סיבוב עם היא אורתוגונאלית ( A AAT I במישור 2 במרחב 3 ראינו שמטריצת הסיבוב בזווית T ) Aובנוסף 1 ). det(A היא sin cos cos . sin המצב שונה כי תמיד הסיבוב הוא סביב ציר מסיום שאינו משתנה על ידי הסיבוב .אם זה סיבוב סביב ציר בכיוון , aאז Aa a והסיבוב הוא במישור אשר aהוא הנורמל שלו .נציג תחילה את הסיבובים סביב הצירים הראשיים. סיבוב סביב ציר ה:x - z z y x 0 sin cos 1 0 , Px 0 cos 0 sin A אלכס גולדוורד ולביא קרפ © 9 סיבוב סביב ציר ה:y - 0 sin 1 0 0 cos סיבוב סביב ציר ה:z - 0 0 1 8.1.1 cos ,P 0 y sin sin cos 0 cos . P sin z 0 הקשר ביין סיבובי ושיקופים טענה .6 יהיו aוb למישור עם הנורמל שני וקטורים ב a ויהי Rb 3 אשר הזווית ביניהם היא . יהי Ra שיקוף ביחס שיקוף ביחס למישור על הנורמל . bאז ( A RbRa סיבוב בזווית 2 סביב מסקה .1 ab )12 .c באמצעות השיקופים ניתן לבנות את כל העתקות האלמנטאריות (הטלות וסיבובים ). הוכחה :אני אתן הוכחה פורמאלית .ניתן להראות טענה זו גם על סמך שיקולים גיאומטריים בלבד. מכיוון ש Raו Rb הם מטריצות אורתוגונאליות ,אז det(A) det(Ra )det(Rb ) (1)2 1 שנמצאים במישור עם הנורמל במישור עם הנורמל b a A גם אורתוגונאלית , ולכן A אינם משתנים על ידי השיקוף מטריצת סיבוב .הווקטורים Ra והווקטורים שנמצאים אינם משתנים על ידי השיקוף , Rלכן הווקטור b ab שנמצא בחיתוך A של שני המישורים אינו משתנה על ידי RbRa ידי ( ) 12הוא סיבוב במישור אשר a bהוא הנורמל שלו .נותר להראות שהסיבוב הוא בזווית T . 2אז ניקח וקטור יחידה xששייך למישור שבו מתבצע הסיבוב ) x (a b) 0 ( ,ונראה שהזווית ביין xל Axהיא , 2כלומר וזהו ציר הסיבוב .כעת אנו יודעים ש ) ( . x (Ax) cos(2 T אנו יכולים להניח שגם aוb הם וקטורי יחידה .נסמן את הזווית ביניהם ב , אז שינתן על )13 אלכס גולדוורד ולביא קרפ © 10 ( . a b cos T )14 לפי הנוסחה (, ) 10 . Ra x x 2a aT x נפעיל כעת את ( ) 10עם הנורמל b על : Ra x T T T x 2a a x 2b b x 4b b a a x Ax Rb (Ra x) x 2a a x 2bbT x 2a aT x T כעת ,הווקטורים ו xנמצאים באותו מישור .אם הזווית ביין xל aהיא , אז הזוית ביין xל b ,a bהיא , כלומר מתקיים ש xT a cos x a b 1 T . ו ) . x b cos( ובנוסף נשתמש בנתונים ש T ,ב ( ) 14ובנוסחאות טריגונומטריות ונקבל 4 xT a xT b bT a 2 2 2 xT b xT Ax xT x 2 xT a 1 2 cos 2 cos ( ) 4 cos cos( )cos 2 2 2 1 2 cos2 2 cos cos sin sin 4 cos cos cos cos sin sin 1 2 cos2 2 cos2 cos2 sin2 sin2 1 2 cos sin 2 sin sin , 1 2 cos2 cos2 1 2 sin2 sin2 2 2 2 2 1 2 sin2 ) cos(2 כלומר ( ) 13מתקיים וזה מסיים את ההוכחה. 9.1.1 חישוב מטריצת הסיבוב בסעיף זה נדון כיצד לחשב את מטריצת הסיבוב כאשר המישור וזווית הסיבוב נתונים .הנוסחה () 13 אינה יעילה כאן משום שקשה לחשב את הנורמלים aוb כאשר הנורמל של המישור והזווית נתונים. להבדיל מהטלות ושיקופים ,כאן אין נוסחה פשוטה לחישובים .הדרך הפשוטה ביותר מתבססת על בסיס אורתונורמלי ששנים מווקטורי הבסיס פורשים את המישור .נציג דרך זו בדוגמה הבאה. אלכס גולדוורד ולביא קרפ © 11 דוגמה .6 2 מצא את מטריצת הסיבוב בזווית סביב הציר בכיוון 1ונגד כיוון 2 השעון. פתרון :נחפש בסיס אורתונורמלי של 3 כך ששניים מווקטורי הבסיס פורשים את המישור .המישור ניתן על ידי . x 3 :2x 1 x 2 2x 3 0 1 1 אז הווקטורים 0 ו 4 הם גם בסיס של המישור וגם אורתוגונאליים .לפיכך הבסיס האורתו 1 1 נורמאלי המתאים עברונו הוא 1 1 2 2 3 2 3 ( . 0 , 3 4 2 , 31 1 1 2 2 3 2 3 )15 נסמן את וקטורי הבסיס האורתונורמלי ( ) 15ב q 2 , q 1ו q 3נציב q1, q 2, q 3 הסיבוב נסמן ב . Aמכיוון ש Qבסיס אורתונורמלי ו q 3 Qואת מטריצת הוא ציר הסיבוב ,אז Aq1 cos q1 sin q 2 0q 3 ( . Aq 2 sin q1 cos q 2 0q 3 Aq 3 0q1 0q 2 1q 3 3 יהי , x אז . x q 1 q q 3 Q נשלב זאת עם ( ) 16ונקבל )16 © אלכס גולדוורד ולביא קרפ )17 ( , 12 Ax AQ Aq 1 Aq 2 Aq 3 cos q1 sin q 2 0q 3 sin q1 cos q 2 0q 3 q 3 q cos sin q sin cos q 1 2 3 cos sin 0 Q sin cos 0 0 0 1 , כלומר cos sin 0 AQ Q sin cos 0 0 0 1 או )18 cos sin 0 cos sin 0 1 cos 0 Q Q sin cos 0 QT ( . A Q sin 0 0 1 0 0 1




© Copyright 2026