
EC487 Advanced Microeconomicss, Part II: Lecture 10
EC487 Advanced Microeconomicss, Part II:
Lecture 10
Leonardo Felli
NAB.2.04
18 March 2015
Moral Hazard
I
Consider the contractual relationship between two agents (a
principal and an agent)
I
The principal hires the agent to perform a task.
I
The agent chooses his effort intensity, a, which affects the
outcome of the task, q.
I
The principal only cares about the outcome, but effort is
costly for the agent, hence the principal has to compensate
the agent for incurring the cost of effort.
I
Effort is observable only to the agent, (it is the agent’s private
information).
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
2 / 46
Moral Hazard (2)
I
Assume that the outcome of the task can take only two
values: q ∈ {0, 1}.
I
We assume that when q = 1 the task is successful and when
q = 0 the task is a failure.
I
The probability of success is:
P{q = 1|a} = p(a),
p 0 (·) > 0, p 00 (·) < 0.
where p(0) = 0, lim p(a) = 1, and p 0 (0) > 1.
a→∞
I
The principal’s preferences are represented by:
V (q − w ),
V 0 (·) > 0, V 00 (·) ≤ 0
where w is the transfer to the agent.
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
3 / 46
Moral Hazard (3)
I
The agent’s preferences are represented by the utility function
separable in income and effort:
U 0 (·) > 0, U 00 (·) ≤ 0
U(w ) − φ(a),
where φ0 (·) > 0, φ00 (·) ≥ 0.
I
For convenience we take
φ(a) = a
I
We normalize the agent’s outside option to:
U = 0.
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
4 / 46
Moral Hazard (4)
Assume that:
I
a is chosen by the agent before uncertainty is realized;
I
a is only observed by the agent. It is his private information.
I
q is verifiable information (observable to all agents involved in
the contract Court included).
I
the transfer w can only be contingent on the verifiable
information q.
I
q is not in a one-to-one relation with the effort a.
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
5 / 46
First Best Contract
I
The first best contract can be contingent on a. It is obtained
as the solution to the problem:
max
a,wi
s.t.
I
p(a) V (1 − w1 ) + (1 − p(a)) V (−w0 )
p(a) U(w1 ) + (1 − p(a)) U(w0 ) ≥ a
The optimal pair of transfers w1∗ and w0∗ are such that the
following FOC (Borch optimal risk-sharing rule) are satisfied:
V 0 (1 − w1∗ )
V 0 (−w0∗ )
=
∗
0
U (w1 )
U 0 (w0∗ )
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
6 / 46
First Best Contract (2)
I
These transfers are paid only if the effort level coincides with
a∗ that satisfies the following FOC:
∗
∗
U(w1∗ ) − U(w0∗ )
1
0 ∗ V (1 − w1 ) − V (−w0 )
p (a )
+
= 0 ∗
∗
∗
0
0
V (1 − w1 )
U (w1 )
U (w1 )
I
Finally the agent’s expected utility coincides with the outside
option:
p(a∗ ) U(w1∗ ) + (1 − p(a∗ )) U(w0∗ ) = a∗
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
7 / 46
First Best Contract (3)
I
If the principal is risk neutral:
V (x) = x
I
Then the conditions above become:
w1∗ = w0∗ = w ∗
and
U(w ∗ ) = a∗ ,
I
p 0 (a∗ ) =
1
U 0 (w ∗ )
If the agent is risk neutral:
U(x) = x
I
Then the optimum entails:
w1∗ − w0∗ = 1,
Leonardo Felli (LSE)
p 0 (a∗ ) = 1.
EC487 Advanced Microeconomicss, Part II
18 March 2015
8 / 46
Second Best Contract
I
If a is not verifiable then for every w1 and w0 it is determined
so that:
max p(a) U(w1 ) + (1 − p(a)) U(w0 ) − a
(1)
a
I
The latter is the agent’s incentive problem.
I
Only the agent controls a and hence incentives for the agent
to choose the principal’s desired level of a have to be induced
through the contingent trasfer w (q).
I
In other words, the second best contract can be contingent
only on q.
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
9 / 46
Second Best Contract (2)
I
The second best contract can be obtained as the solution to
the problem:
max p(ˆa) V (1 − w1 ) + (1 − p(ˆa)) V (−w0 )
wi
s.t. p(ˆa) U(w1 ) + (1 − p(ˆa)) U(w0 ) ≥ ˆa
ˆa(w1 , w0 ) ∈ arg max p(a) U(w1 ) + (1 − p(a)) U(w0 ) − a
a
I
The first constraint is known as the agent’s individual
rationality constraint (IR),
I
The second constraint is known as the agent’s incentive
compatibility constraint (IC).
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
10 / 46
Second Best Contract (3)
I
The FOC of the incentive compatibility constraint are:
p 0 (ˆa) [U(w1 ) − U(w0 )] = 1
I
(2)
A first observation: from this condition it is clear that full
insurance:
w1 = w0
leads to no incentives: p(0) = 0
I
Assumptions on p(·) imply that the solution to this condition
is unique for any pair (w0 , w1 ).
I
We can replace the agent’s (IC) by the set of FOC in (2).
I
In general replacing the (IC) constraint with the FOC of the
agent’s effort choice problem is not a valid approach as we
will see later on.
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
11 / 46
Risk Neutral Agent
I
Consider now the case in which the agent is risk neutral:
U(x) = x
we have seen that first best optimality requires
p 0 (a∗ ) = 1
I
In this case the FOC of the (IC) constraint becomes:
p 0 (ˆa)(w1 − w0 ) = 1
I
Therefore setting
w1 − w0 = 1
leads to the first best allocation: optimal risk sharing and
optimal incentives.
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
12 / 46
Risk Neutral Agent
I
I
The reason is that:
I
optimal risk sharing requires that the agent bears all the risk in
the environment,
I
optimal incentives requires that the agent is residual claimant.
This is achieved by selling the activity to the agent at a fix
price
−w0 > 0
so that the risk averse principal receives full insurance.
I
Notice that in this case we need that the agent has deep
enough pockets: when the outcome is q = 0 the agent’s
payoff is w0 < 0.
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
13 / 46
Risk Neutral and Resource Constrained Agent
I
In other words, the agent must be willing to incur a loss with
a strictly positive probability.
I
It is often natural to assume that the agent has no resources
to put in the activity.
I
This implies a resource constraint: wi ≥ 0.
I
In this case the problem becomes:
max
ˆ
a,wi
s.t.
p(ˆa) V (1 − w1 ) + (1 − p(ˆa)) V (−w0 )
p(ˆa) w1 + (1 − p(ˆa)) w0 ≥ ˆa
p 0 (ˆa)(w1 − w0 ) = 1
wi ≥ 0 ∀i ∈ {0, 1}
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
14 / 46
Risk Neutral and Resource Constrained Agent (2)
I
I
In the situation in which the agent is resource constrained not
all the risk can be transferred to the agent.
The constraint wi ≥ 0 will be binding for the transfer w0 :
w0 = 0
I
I
It is still possible to create first best incentives but for this
purpose the agent’s needs to be rewarded.
If w1 − w0 = 1 then the agent’s payoff is:
p(a∗ ) − a∗ > 0
I
since p 0 (0) > 1 and p 0 (a∗ ) = 1, the (IR) is not binding.
The principal then makes zero profits, this cannot be optimal:
p(a∗ ) V (1 − 1) + (1 − p(a∗ )) V (0) = V (0)
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
15 / 46
Risk Neutral and Resource Constrained Agent (3)
I
Assume now that the principal is risk neutral as well:
V (x) = x
I
The principal’s problem is:
max
ˆ
a,wi
s.t.
p(ˆa) (1 − w1 ) − (1 − p(ˆa)) w0
p(ˆa) w1 + (1 − p(ˆa)) w0 ≥ ˆa
p 0 (ˆa)(w1 − w0 ) = 1
wi ≥ 0
I
∀i ∈ {0, 1}
The solution implies that
w0 = 0,
Leonardo Felli (LSE)
w1 =
1
p 0 (ˆa)
EC487 Advanced Microeconomicss, Part II
18 March 2015
16 / 46
Risk Neutral and Resource Constrained Agent (4)
I
Moreover, ˆa solves the constrained problem:
max
p(ˆa) (1 − w1 )
s.t.
p 0 (ˆa) w1 = 1
ˆ
a
or
p 0 (ˆa) = 1 −
I
p(ˆa) p 00 (ˆa)
(p 0 (ˆa))2
Given that p 00 (·) < 0 we then conclude:
ˆa < a∗ .
I
The resource constraint implies a second best level of effort.
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
17 / 46
Risk Neutral and Resource Constrained Agent (5)
I
The principal trades off the lower effort choice by the agent
against the higher compensation the agents needs to have the
incentives to exert any level of effort.
I
However the agent still gets a strictly positive payoff:
p(ˆa)
− ˆa > 0
p 0 (ˆa)
I
Indeed, by Taylor expansion we can show that there exists
ξ ∈ (0, ˆa) such that
p(ˆa) − p 0 (ˆa) ˆa = −p 00 (ξ)
Leonardo Felli (LSE)
ˆa2
>0
2
EC487 Advanced Microeconomicss, Part II
18 March 2015
18 / 46
Risk Averse Principal and Agent
I
Consider now the problem with risk averse principal and agent:
max
ˆ
a,wi
s.t.
p(ˆa) V (1 − w1 ) + (1 − p(ˆa)) V (−w0 )
p(ˆa) U(w1 ) + (1 − p(ˆa)) U(w0 ) ≥ ˆa
p 0 (ˆa) [U(w1 ) − U(w0 )] = 1
I
Let λ and µ be the lagrange multipliers of the (IR) and (IC)
constraints, respectively.
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
19 / 46
Risk Averse Principal and Agent (2)
I
The FOC with respect to w1 and w0 imply:
V 0 (1 − w1∗∗ )
p 0 (a∗∗ )
=
λ
+
µ
U 0 (w1∗∗ )
p(a∗∗ )
and
V 0 (−w0∗∗ )
p 0 (a∗∗ )
=
λ
−
µ
U 0 (w0∗∗ )
1 − p(a∗∗ )
I
Clearly for µ = 0 we get back Borch rule, however µ > 0:
optimal insurance is distorted.
I
Since V 00 (·) < 0 and U 00 (·) < 0 the agent faces in equilibrium
more risk than he would face in the absence of moral hazard:
w1∗∗ > w1∗ ,
Leonardo Felli (LSE)
w0∗∗ < w0∗
EC487 Advanced Microeconomicss, Part II
18 March 2015
20 / 46
Risk Averse Principal and Agent (3)
I
Moreover we get that:
U(w1∗∗ ) = a∗∗ +
1 − p(a∗∗ )
>0
p 0 (a∗∗ )
U(w0∗∗ ) = a∗∗ −
I
p(a∗∗ )
<0
p 0 (a∗∗ )
In other words, λ > 0 and
p(a∗∗ )U(w1∗∗ ) + (1 − p(a∗∗ ))U(w0∗∗ ) = a∗∗
I
The agent cannot be resource constrained.
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
21 / 46
Risk Averse Principal and Agent (4)
I
The principal trades off the gains from providing optimal risk
sharing with the need to leave some extra risk to the agent in
order to create incentives.
I
This implies that in order to satisfy the (IR) constraint the
principal has to leave some of the risk premium to the agent.
I
This implies that the agent will choose a second best level of
effort:
a∗∗ < a∗
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
22 / 46
Sufficient Statistics
I
Assume now that there exist two signals of the state of
nature: q and s ∈ {0, 1}.
I
The signal s may or may not depend on the agent’s effort a,
but does not enter the principal’s and the agent’s utility
function.
I
Let s be verifiable:
w (q = i, s = j) = wij
I
Denote:
Pr {q = i, s = j|a} = pij (a)
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
23 / 46
Sufficient Statistics (2)
I
The principal’s problem is now:
max
ˆ
a,wij
s.t.
1 X
1
X
pij (ˆa) V (i − wij )
i=0 j=0
1 X
1
X
pij (ˆa) U(wij ) ≥ ˆa
i=0 j=0
1 X
1
X
pij0 (ˆa)U(wij ) = 1
i=0 j=0
I
The latter are the FOC of the anget’s (IC) constraint.
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
24 / 46
Sufficient Statistics (3)
I
The FOC with respect to wij give:
pij0 (ˆa)
V 0 (i − wij )
=
λ
+
µ
U 0 (wij )
pij (ˆa)
I
The variable s drops out of the incentive scheme (wij = wi )
provided that for every ˆa:
0 (ˆ
p 0 (ˆa)
a)
pi0
= i1 ,
pi0 (ˆa)
pi1 (ˆa)
∀i = 0, 1
I
Integrating this condition we obtain for a given constant
ci > 0:
pi0 (ˆa) = ci pi1 (ˆa),
∀i ∈ {0, 1}
I
This condition states that q is a sufficient statistics for (q, s)
with respect to ˆa, or s is not informative about ˆa given q.
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
25 / 46
Continuous Outcomes
I
Consider now the more general environment in which the
state-space representation of the effort’s outcome is the
random variable q(a, θ), where θ ∈ [θ, θ].
I
First let us consider the parameterized distribution
characterization of the same problem: q ∈ Q = [q, q] is the
support of the density f (q, a) > 0 and cdf F (q, a).
I
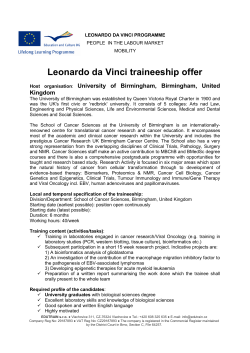
We assume that:
Fa (q, a) < 0,
I
∀q ∈ [q, q]
The effort a produces a first-order stochastic dominant shift
on Q. If a0 < a1 :
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
26 / 46
First-Order Stochastic Dominant Shift
6
1
F (q, a)
F (q, a0 )
F (q, a1 )
-
q
Leonardo Felli (LSE)
q
EC487 Advanced Microeconomicss, Part II
q
18 March 2015
27 / 46
First Best
I
In this setup the first best contract solves:
Z q
max
V (q − w (q)) f (q, a)dq
a,w (·)
q
Z
q
U(w (q)) f (q, a)dq ≥ a
s.t.
q
I
That is:
V 0 (q − w ∗ (q))
= λ,
∀q ∈ Q
U 0 (w ∗ (q))
Z q
U(w ∗ (q)) f (q, a∗ )dq = a∗
q
and
Z
q
[V (q − w ∗ (q)) + λU(w ∗ (q))] fa (q, a∗ )dq = λ
q
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
28 / 46
Second Best
I
The second best contract solves:
Z q
max
V (q − w (q)) f (q, ˆa)dq
ˆ
a,w (·)
q
q
Z
s.t.
U(w (q)) f (q, ˆa)dq ≥ ˆa
Z q
U(w (q)) f (q, a)dq − a
ˆa ∈ arg max
q
a
I
q
The (IC) constraint implies, assuming an interior optimum:
Z q
U(w (q)) fa (q, ˆa)dq = 1
q
and
Z
q
U(w (q)) faa (q, ˆa)dq ≤ 0
q
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
29 / 46
First Order Approach
I
We proceed using the so called first order approach:
substitute the (IC) constraint with the FOC of the agent’s
incentive problem.
I
In this case the lagrangian is:
Z q
L=
V (q − w (q)) f (q, ˆa)dq
q
"Z
#
q
U(w (q)) f (q, ˆa)dq − ˆa
+λ
q
"Z
#
q
U(w (q)) fa (q, ˆa)dq − 1
+ µ
q
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
30 / 46
Second Best Contract
I
There exists no constraint on the first and second derivative
of w (·).
I
Therefore it is possible to solve the problem by pointwise
maximization:
V 0 (q − w (q))
fa (q, ˆa)
=λ+µ
,
0
U (w (q))
f (q, ˆa)
I
∀q ∈ Q
This is, once again, the modified Borch rule.
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
31 / 46
Second Best Contract (2)
Assume that:
I
the agent is strictly risk averse:
U 00 (·) < 0,
I
the distribution F (q, a) has fixed support Q:
Fa (q, a) = Fa (q, a) = 0,
I
the distribution F (q, a) satisfies first order stochastic
dominance:
Fa (q, a) < 0
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
32 / 46
Second Best Contract (3)
Theorem (Holmstr¨om, 1979)
Assume that the first order approach is valid then at the optimum:
µ > 0.
Proof: Assume not: µ ≤ 0.
From the necessary condition
∂L
=0
∂a
and the modified (IC) constraint we obtain:
"Z
Z
q
q
V (q − w (q)) fa (q, ˆa)dq + µ
q
Leonardo Felli (LSE)
#
U(w (q)) faa (q, ˆa)dq = 0
q
EC487 Advanced Microeconomicss, Part II
18 March 2015
33 / 46
Second Best Contract (4)
I
Using the second order condition of the agent’s incentive
problem
Z q
U(w (q)) faa (q, ˆa)dq ≤ 0
q
when µ ≤ 0 it becomes:
Z q
V (q − w (q)) fa (q, ˆa)dq ≤ 0
q
I
Define w0 (q) as the function that solves, for µ = 0:
V 0 (q − w0 (q))
= λ,
U 0 (w0 (q))
I
∀q ∈ Q
From U 00 (·) < 0, w00 (·) exists and is such that:
0 ≤ w00 (q) =
Leonardo Felli (LSE)
V 00 U 0
<1
V 00 U 0 + V 0 U 00
EC487 Advanced Microeconomicss, Part II
18 March 2015
34 / 46
Second Best Contract (5)
I
Moreover, when µ ≤ 0 we have from
fa (q, ˆa)
V 0 (q − w (q))
=λ+µ
,
0
U (w (q))
f (q, ˆa)
∀q ∈ Q
that
I
w (q) ≤ w0 (q)
⇔
fa (q, ˆa) ≥ 0
w (q) > w0 (q)
⇔
fa (q, ˆa) < 0
Since
∂(V 0 (q − w (q)/U 0 (w (q)))
V 00 U 0 + V 0 U 00
=−
>0
∂w (q)
(U 0 )2
I
We therefore conclude that for all q ∈ Q:
V (q − w (q)) fa (q, ˆa) ≥ V (q − w0 (q)) fa (q, ˆa)
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
35 / 46
Second Best Contract (6)
I
Integrating over Q we then obtain:
Z q
Z q
V (q − w (q)) fa (q, ˆa) dq ≥
V (q − w0 (q)) fa (q, ˆa) dq
q
I
q
Integrating by parts and using the fixed support and the first
order stochastic dominance we conclude:
Z q
V (q − w0 (q)) fa (q, ˆa) dq =
q
q
V (q − w0 (q)) Fa (q, ˆa) q −
=
Z
−
q
V 0 (q − w0 (q)) (1 − w00 (q)) Fa (q, ˆa) dq > 0
q
A contradiction of the necessary conditions above.
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
36 / 46
Observations
I
We have assumed that a is in the interior of A. The problem
is much simpler if the agent’s incentive problem leads to a
corner solution.
I
The assumption that Q does not depend on a is crucial,
moving support may lead to first best outcome.
I
Commitment to the contract is critical: risk will be
renegotiated away from the agent between choice of a and
realization of q.
I
The fa /f is the derivative of the ln f and the gradient for a
MLE of a.
I
We proved 0 ≤ w00 (·) < 1 but we have not proved that w (·) is
monotonic.
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
37 / 46
MLR Property
I
The monotone likelihood ratio property (MLRP) is satisfied
for F (·) and f (·) iff
d fa (q, a)
>0
dq f (q, a)
I
Notice that MLRP implies FOSD, Fa (q, a) < 0 for every
q ∈ Q.
In fact:
Z q
fa (s, a)
Fa (q, a) =
f (s, a)ds
q f (s, a)
I
I
Since
Z
q
I
(3)
q
fa (s, a)
f (s, a)ds = Fa (q, a) − Fa (q, a) = 0
f (s, a)
Then for every q < q the fact that the likelihood ratio is
increasing in s implies that (3) is strictly negative.
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
38 / 46
MLR Property (2)
Theorem (Holmstr¨om, 1979, Shavell 1979)
Under the first order approach, if f (·) satisfies the MLRP, then the
wage contract w (·) is increasing in output.
The proof is a direct consequence of the definition of MLRP.
Notice that if the agent can freely dispose of output then
monotonicity of w (·) is a constraint that the solution must satisfy.
Theorem (Holmstr¨om, 1979, Shavell 1979)
Under the first order approach, if w (q) is the solution then there
exists a new contract w (q, s) that strictly Pareto dominates w (q)
if and only if [fa (q, s, a)/f (q, s, a)] varies with s.
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
39 / 46
First Order Approach: Problems
The first order approach of first finding w (·) using the relaxed
problem and then checking that the principal’s choice of ˆa actually
solves the agent’s incentive problem is logically invalid (additional
restrictions).
Problem
if the SOC of the agent’s incentive problem are not globally
satisfied, then the solution to the principal’s problem satisfies the
agent’s FOC but not the principal’s ones.
This is because the global maximum to the principal’s problem
might involve a corner solution and so the principal’s selected ˆa
may not satisfy the necessary Kuhn-Tucker conditions of the
relaxed problem.
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
40 / 46
Convexity of Distribution Function Condition
Definition
A distribution F (·) satisfies the Convexity of Distribution Function
Condition (CDFC) if and only if for every γ ∈ [0, 1]:
F (x, γa + (1 − γ)a0 ) ≤ γF (x, a) + (1 − γ)F (x, a0 )
or
Faa (x, a) ≥ 0.
Special case of CDFC is the linear distribution condition: let f (q)
FOSD f (q) then f (q, a) = af (q) + (1 − a)f (q)
Theorem (Mirrlees 1976, Rogerson 1985)
The first order approach is valid if F (q, a) satisfies MLRP and
CDFC.
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
41 / 46
CARA Utility, Normal and Linear Contracts
I
Let the principal be risk neutral V (x) = x and the agent’s
preferences be represented by:
U(x, a) = −e −r (x−φ(a))
I
Recall that r is the index of absolute risk aversion.
I
Let the outcome q be such that
q =a+ε
I
ε ∼ N (0, σ 2 )
where
The cost of effort is quadratic:
φ(a) =
a2
2
and we normalize U = −1.
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
42 / 46
CARA Utility, Normal and Linear Contracts: 1st Best
I
Restrict now the principal to offer only linear contracts:
w (q) = β q + γ
I
Recall also that if
x ∼ N (µ, σ 2 )
then:
I
1 2 2
Ex e t x = e µ t− 2 σ t
First best
max
w (·),ˆ
a
s.t.
I
I
I
Eq [q − β q − γ]
h
i
Eq −e −r (β q+γ−φ(ˆa)) ≥ −1
effort choice a∗ = 1
transfer to the agent w ∗ (q) = 1/2 for every q.
expected profit of the principal Π∗ = 1/2
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
43 / 46
CARA Utility, Normal and Linear Contracts: 2nd Best
I
The principal’s problem is:
max
w (·),ˆ
a
s.t.
Eq [q − β q − γ]
h
i
Eq −e −r (β q+γ−φ(ˆa)) ≥ −1
h
i
ˆa ∈ arg max Eq −e −r (β q+γ−φ(a))
a
I
Notice that:
h
i
1 2 2 2
Eq −e −r (β a+β ε+γ−φ(a)) = − e −r (β a+γ−φ(a))+ 2 β r σ
I
Therefore the agent’s incentive problem becomes:
I
a2
r
− β 2 σ2
a
2
2
The unique solution to this problem is then
ˆa ∈ arg max β a + γ −
ˆa = β
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
44 / 46
CARA Utility, Normal and Linear Contracts: 2nd Best (2)
I
Then the second best problem becomes:
ˆa − ˆa2 − γ
max
γ,ˆ
a
ˆa2 + γ −
s.t.
I
The solution is then:
ˆa = β =
I
r
ˆa2
− ˆa2 σ 2 ≥ 0
2
2
1
,
1 + r σ2
γ=
r σ2 − 1
2 (1 + r σ 2 )2
Moreover:
ˆa < a∗ ,
Leonardo Felli (LSE)
Π=
1
< Π∗
2 (1 + r σ 2 )
EC487 Advanced Microeconomicss, Part II
18 March 2015
45 / 46
Observations
I
Comparative static: if either r or σ 2 decreases the power of
the optimal incentive scheme increases: hidden action
becomes less distortionary.
I
If the contract space is unrestricted then Mirrlees (1999)
shows that if unlimited punishments are possible, the first best
outcome can be approximated arbitrarily closely.
I
Intuition: in the tail of the normal distribution q is very
informative about ˆa. Therefore, a harsh punishment can
achieve first best incentives at a cost to the principal.
I
The unboundedness of the support of the distribution allows
the principal to render these costs arbitrarily small.
I
The result generalizes to other distributions with unbounded
support and to general utility functions.
Leonardo Felli (LSE)
EC487 Advanced Microeconomicss, Part II
18 March 2015
46 / 46










© Copyright 2026