
Algorithms for Reducing Noise in Synthetic Aperture Radar Images
Outline
Introduction
Image Filtering Algorithms
Conclusion
Algorithms for Reducing Noise
in Synthetic Aperture Radar Images
Troy Peterson Kling
& Jeffrey Kidwell
University of North Carolina Wilmington
April 24, 2015
1/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Introduction
Problem Description
Natural Language Description
Formal Description
Why CSC 380?
Image Filtering Algorithms
Local Filters
Boxcar Filter
Gaussian Convolution
J. S. Lee’s Filter
Non-local Filters
Non-local Means
Fourier Transform
Modified ART-2
Conclusion
The Numbers
Results for SAR Images
Future Work
Questions
2/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Problem Description
Why CSC 380?
Natural Language Description
Images of Earth’s surface taken by synthetic aperture radar (SAR)
instruments are inherently noisy. In order to perform any kind of
analysis or classification on SAR images, it is desirable to first
reduce their granularity. This can be achieved by applying noise
reduction filters to the images.
3/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Problem Description
Why CSC 380?
Natural Language Description
Images of Earth’s surface taken by synthetic aperture radar (SAR)
instruments are inherently noisy. In order to perform any kind of
analysis or classification on SAR images, it is desirable to first
reduce their granularity. This can be achieved by applying noise
reduction filters to the images.
Problem description: Given a noisy synthetic aperture radar
image and a selection of image filters (Boxcar, Gaussian
convolution, Lee, non-local means, Fourier transform, and modified
ART-2 neural networks), the goal is to select the filter that best
reduces noise in the image while also retaining image clarity by
preserving edge details.
3/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Problem Description
Why CSC 380?
Formal Description
Given an n-by-m synthetic aperture radar image, X , with speckle
noise modeled as a standard complex Gaussian distribution
4/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Problem Description
Why CSC 380?
Formal Description
Given an n-by-m synthetic aperture radar image, X , with speckle
noise modeled as a standard complex Gaussian distribution
p(z) =
1
exp(−|z|2 )
π
(1)
4/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Problem Description
Why CSC 380?
Formal Description
Given an n-by-m synthetic aperture radar image, X , with speckle
noise modeled as a standard complex Gaussian distribution
p(z) =
1
exp(−|z|2 )
π
(1)
where z = Ae iθ is a vector with amplitude A and phase θ, and
given a set of noise reduction filters F = {f1 , f2 , ..., fk }, find fp ∈ F
such that
4/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Problem Description
Why CSC 380?
Formal Description
Given an n-by-m synthetic aperture radar image, X , with speckle
noise modeled as a standard complex Gaussian distribution
p(z) =
1
exp(−|z|2 )
π
(1)
where z = Ae iθ is a vector with amplitude A and phase θ, and
given a set of noise reduction filters F = {f1 , f2 , ..., fk }, find fp ∈ F
such that
MSE (fp (X )) ≤ MSE (fq (X )) ∀ fq ∈ F
(2)
4/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Problem Description
Why CSC 380?
Formal Description
Given an n-by-m synthetic aperture radar image, X , with speckle
noise modeled as a standard complex Gaussian distribution
p(z) =
1
exp(−|z|2 )
π
(1)
where z = Ae iθ is a vector with amplitude A and phase θ, and
given a set of noise reduction filters F = {f1 , f2 , ..., fk }, find fp ∈ F
such that
MSE (fp (X )) ≤ MSE (fq (X )) ∀ fq ∈ F
(2)
where
4/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Problem Description
Why CSC 380?
Formal Description
Given an n-by-m synthetic aperture radar image, X , with speckle
noise modeled as a standard complex Gaussian distribution
p(z) =
1
exp(−|z|2 )
π
(1)
where z = Ae iθ is a vector with amplitude A and phase θ, and
given a set of noise reduction filters F = {f1 , f2 , ..., fk }, find fp ∈ F
such that
MSE (fp (X )) ≤ MSE (fq (X )) ∀ fq ∈ F
(2)
where
n
m
1 XX
MSE (fq (X )) =
(fq (Xij ) − Tij )2
nm
(3)
i=0 j=0
4/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Problem Description
Why CSC 380?
Formal Description
Given an n-by-m synthetic aperture radar image, X , with speckle
noise modeled as a standard complex Gaussian distribution
p(z) =
1
exp(−|z|2 )
π
(1)
where z = Ae iθ is a vector with amplitude A and phase θ, and
given a set of noise reduction filters F = {f1 , f2 , ..., fk }, find fp ∈ F
such that
MSE (fp (X )) ≤ MSE (fq (X )) ∀ fq ∈ F
(2)
where
n
m
1 XX
MSE (fq (X )) =
(fq (Xij ) − Tij )2
nm
(3)
i=0 j=0
and where T is the ideal, non-noisy image.
Troy Peterson Kling & Jeffrey Kidwell
4/28
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Problem Description
Why CSC 380?
Why CSC 380?
I
Noise reduction has several real world applications, especially
in the remote sensing and medical fields.
5/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Problem Description
Why CSC 380?
Why CSC 380?
I
Noise reduction has several real world applications, especially
in the remote sensing and medical fields.
I
We researched and implemented six different algorithms for
solving a complex problem.
5/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Problem Description
Why CSC 380?
Why CSC 380?
I
Noise reduction has several real world applications, especially
in the remote sensing and medical fields.
I
We researched and implemented six different algorithms for
solving a complex problem.
I
We analyzed the performance of each algorithm using Big-O
notation and run-time tests.
5/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Problem Description
Why CSC 380?
Why CSC 380?
I
Noise reduction has several real world applications, especially
in the remote sensing and medical fields.
I
We researched and implemented six different algorithms for
solving a complex problem.
I
We analyzed the performance of each algorithm using Big-O
notation and run-time tests.
I
We found the optimal image filter by comparing the root
mean squared error (RMSE) and peak signal-to-noise ratio
(PSNR) statistics for each filter.
5/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Boxcar Filter
The Boxcar filter is a non-adaptive local filter. It reduces the
overall variation present in an image by setting each pixel’s
intensity equal to the average of its neighborhood.
6/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Boxcar Filter
The Boxcar filter is a non-adaptive local filter. It reduces the
overall variation present in an image by setting each pixel’s
intensity equal to the average of its neighborhood.
Let Xi be a pixel from the unfiltered image, and let Yi be the
corresponding pixel in the filtered image. Then the Boxcar filter
can be written as follows:
6/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Boxcar Filter
The Boxcar filter is a non-adaptive local filter. It reduces the
overall variation present in an image by setting each pixel’s
intensity equal to the average of its neighborhood.
Let Xi be a pixel from the unfiltered image, and let Yi be the
corresponding pixel in the filtered image. Then the Boxcar filter
can be written as follows:
1 X
Xj
(4)
Yi = Box(Xi ) =
|Wi |
j∈Wi
6/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Boxcar Filter
The Boxcar filter is a non-adaptive local filter. It reduces the
overall variation present in an image by setting each pixel’s
intensity equal to the average of its neighborhood.
Let Xi be a pixel from the unfiltered image, and let Yi be the
corresponding pixel in the filtered image. Then the Boxcar filter
can be written as follows:
1 X
Xj
(4)
Yi = Box(Xi ) =
|Wi |
j∈Wi
where Wi denotes the set of all pixels in pixel i’s neighborhood.
6/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Boxcar Filter Results
Figure: Left: Original image. Center: Noise added programmatically.
Right: Image after applying a 5x5 Boxcar filter.
RMSE: 10.444
PSNR: 27.753
Troy Peterson Kling & Jeffrey Kidwell
7/28
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Gaussian Convolution
A Gaussian convolution filter is a signal processing technique that
convolves a signal f with a Gaussian kernel. Mathematically, this
amounts to a Weierstrass transform
8/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Gaussian Convolution
A Gaussian convolution filter is a signal processing technique that
convolves a signal f with a Gaussian kernel. Mathematically, this
amounts to a Weierstrass transform
Z ∞
(x−y )2
1
F (x) = √
f (y )e − 4 dy
(5)
4π −∞
8/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Gaussian Convolution
A Gaussian convolution filter is a signal processing technique that
convolves a signal f with a Gaussian kernel. Mathematically, this
amounts to a Weierstrass transform
Z ∞
(x−y )2
1
F (x) = √
f (y )e − 4 dy
(5)
4π −∞
Gaussian convolution can be expressed as a moving weighted
average. The process of applying a Gaussian kernel KG of radius r
to a single pixel, Xij , can be written as follows.
8/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Gaussian Convolution
A Gaussian convolution filter is a signal processing technique that
convolves a signal f with a Gaussian kernel. Mathematically, this
amounts to a Weierstrass transform
Z ∞
(x−y )2
1
F (x) = √
f (y )e − 4 dy
(5)
4π −∞
Gaussian convolution can be expressed as a moving weighted
average. The process of applying a Gaussian kernel KG of radius r
to a single pixel, Xij , can be written as follows.
j+r
i+r
X
X
1
Yij = P
KG (p − r , q − r ) · Xpq
KG
(6)
p=i−r q=j−r
8/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Gaussian Convolution
The following is an example of a 5x5 Gaussian convolution filter
used in the image processing domain.
9/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Gaussian Convolution
The following is an example of a 5x5 Gaussian convolution filter
used in the image processing domain.
2 4 5 4 2
4 9 12 9 4
1
5 12 15 12 5 ∗ W
Yij =
(7)
159
4 9 12 9 4
2 4 5 4 2
9/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Gaussian Convolution
The following is an example of a 5x5 Gaussian convolution filter
used in the image processing domain.
2 4 5 4 2
4 9 12 9 4
1
5 12 15 12 5 ∗ W
Yij =
(7)
159
4 9 12 9 4
2 4 5 4 2
This process is repeated for each pixel in the image.
9/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Gaussian Convolution Results
Figure: Left: Original image. Center: Noise added programmatically.
Right: Image after applying a 5x5 Gaussian convolution filter, σ = 1.25.
RMSE: 9.506
PSNR: 28.571
Troy Peterson Kling & Jeffrey Kidwell
10/28
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
J. S. Lee’s Filter
The Lee filter is an adaptive local filter. Compared to the Boxcar
filter, the Lee filter performs better at preserving sharp edges and
point scatterers. It can be written as follows.
11/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
J. S. Lee’s Filter
The Lee filter is an adaptive local filter. Compared to the Boxcar
filter, the Lee filter performs better at preserving sharp edges and
point scatterers. It can be written as follows.
Yi = Lee(Xi ) = Box(Xi ) + k(Xi − Box(Xi ))
(8)
11/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
J. S. Lee’s Filter
The Lee filter is an adaptive local filter. Compared to the Boxcar
filter, the Lee filter performs better at preserving sharp edges and
point scatterers. It can be written as follows.
Yi = Lee(Xi ) = Box(Xi ) + k(Xi − Box(Xi ))
(8)
where k is an adaptive filtering coefficient defined by
11/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
J. S. Lee’s Filter
The Lee filter is an adaptive local filter. Compared to the Boxcar
filter, the Lee filter performs better at preserving sharp edges and
point scatterers. It can be written as follows.
Yi = Lee(Xi ) = Box(Xi ) + k(Xi − Box(Xi ))
(8)
where k is an adaptive filtering coefficient defined by
k=
Var (Y )
Var (W ) − E 2 (W )σ 2
=
Var (W )
Var (W )[1 + σ 2 ]
(9)
11/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
J. S. Lee’s Filter
The Lee filter is an adaptive local filter. Compared to the Boxcar
filter, the Lee filter performs better at preserving sharp edges and
point scatterers. It can be written as follows.
Yi = Lee(Xi ) = Box(Xi ) + k(Xi − Box(Xi ))
(8)
where k is an adaptive filtering coefficient defined by
k=
Var (Y )
Var (W ) − E 2 (W )σ 2
=
Var (W )
Var (W )[1 + σ 2 ]
(9)
where Var () is the variance operator, E () is the expectation, and
σ 2 is the a priori variance of the speckle noise.
11/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
J. S. Lee’s Filter Results
Figure: Left: Original image. Center: Noise added programmatically.
Right: Image after applying a 5x5 Lee filter.
RMSE: 8.740
PSNR: 29.300
Troy Peterson Kling & Jeffrey Kidwell
12/28
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Non-local Means
I
Non-local filters consider
all pixels in the entire
image.
13/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Non-local Means
I
Non-local filters consider
all pixels in the entire
image.
I
Similarity values are
determined by comparing
small windows.
13/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Non-local Means
I
Non-local filters consider
all pixels in the entire
image.
I
Similarity values are
determined by comparing
small windows.
I
Using this knowledge
about similarity, non-local
filters can more accurately
estimate true pixel
intensities.
13/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Non-local Means
I
Non-local filters consider
all pixels in the entire
image.
I
Similarity values are
determined by comparing
small windows.
I
Using this knowledge
about similarity, non-local
filters can more accurately
estimate true pixel
intensities.
13/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Non-local Means
In the non-local means paradigm, each pixel is assigned a new
value equal to a weighted sum of all pixels in the image.
14/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Non-local Means
In the non-local means paradigm, each pixel is assigned a new
value equal to a weighted sum of all pixels in the image.
X
Yi = NL(Xi ) =
w (i, j)Xj
(10)
j∈Wi
14/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Non-local Means
In the non-local means paradigm, each pixel is assigned a new
value equal to a weighted sum of all pixels in the image.
X
Yi = NL(Xi ) =
w (i, j)Xj
(10)
j∈Wi
where w (i, j) is a weight associated with each pair of pixels,
calculated as follows.
14/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Non-local Means
In the non-local means paradigm, each pixel is assigned a new
value equal to a weighted sum of all pixels in the image.
X
Yi = NL(Xi ) =
w (i, j)Xj
(10)
j∈Wi
where w (i, j) is a weight associated with each pair of pixels,
calculated as follows.
1 − d 2 (i,j)
e h2
w (i, j) =
Z (i)
(11)
14/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Non-local Means
In the non-local means paradigm, each pixel is assigned a new
value equal to a weighted sum of all pixels in the image.
X
Yi = NL(Xi ) =
w (i, j)Xj
(10)
j∈Wi
where w (i, j) is a weight associated with each pair of pixels,
calculated as follows.
1 − d 2 (i,j)
e h2
w (i, j) =
Z (i)
(11)
where h is a tuning parameter, d 2 (i, j) is the Euclidean norm, and
Z (i) is the normalizing constant
14/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Non-local Means
In the non-local means paradigm, each pixel is assigned a new
value equal to a weighted sum of all pixels in the image.
X
Yi = NL(Xi ) =
w (i, j)Xj
(10)
j∈Wi
where w (i, j) is a weight associated with each pair of pixels,
calculated as follows.
1 − d 2 (i,j)
e h2
w (i, j) =
Z (i)
(11)
where h is a tuning parameter, d 2 (i, j) is the Euclidean norm, and
Z (i) is the normalizing constant
X − d 2 (i,j)
Z (i) =
e h2
(12)
j
14/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Non-Local Means Results
Figure: Left: Original image. Center: Noise added programmatically.
Right: Image after applying a non-local means filters, using 5x5 similarity
windows, 35x35 search windows, and h = 13.5.
RMSE: 6.158
PSNR: 32.342
Troy Peterson Kling & Jeffrey Kidwell
15/28
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Fourier Transform
Fourier transforms are used to transform a signal from the time
domain to the frequency domain.
16/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Fourier Transform
Fourier transforms are used to transform a signal from the time
domain to the frequency domain.
Z ∞
f (x) =
F (k)e 2πikx dk
(13)
−∞
16/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Fourier Transform
Fourier transforms are used to transform a signal from the time
domain to the frequency domain.
Z ∞
f (x) =
F (k)e 2πikx dk
(13)
−∞
This transformation can be reverse with the inverse Fourier
transform
16/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Fourier Transform
Fourier transforms are used to transform a signal from the time
domain to the frequency domain.
Z ∞
f (x) =
F (k)e 2πikx dk
(13)
−∞
This transformation can be reverse with the inverse Fourier
transform
Z ∞
F (x) =
f (k)e −2πikx dk
(14)
−∞
16/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Fourier Transform
Fourier transforms are used to transform a signal from the time
domain to the frequency domain.
Z ∞
f (x) =
F (k)e 2πikx dk
(13)
−∞
This transformation can be reverse with the inverse Fourier
transform
Z ∞
F (x) =
f (k)e −2πikx dk
(14)
−∞
Noise reduction can be achieved by taking the Fast Fourier
Transform (FFT) of an image, filtering certain frequencies, and
then performing the inverse FFT.
16/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Fourier Transform Results
Figure: Left: Original image. Center: Noise added programmatically.
Right: Image after applying a band-pass Fourier transform.
RMSE: 10.197
PSNR: 27.961
Troy Peterson Kling & Jeffrey Kidwell
17/28
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
ART-2
I
The Adapative Resonance
Theory (ART-2) neural
network is specifically for
pattern recognition.
18/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
ART-2
I
The Adapative Resonance
Theory (ART-2) neural
network is specifically for
pattern recognition.
I
ART-2 is able to
categorize continuous
input patterns into
different groups based on
similarity.
18/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
ART-2
I
The Adapative Resonance
Theory (ART-2) neural
network is specifically for
pattern recognition.
I
ART-2 is able to
categorize continuous
input patterns into
different groups based on
similarity.
I
F1 layer acts as short-term
memory, F2 as long-term.
18/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
ART-2
I
The Adapative Resonance
Theory (ART-2) neural
network is specifically for
pattern recognition.
I
ART-2 is able to
categorize continuous
input patterns into
different groups based on
similarity.
I
F1 layer acts as short-term
memory, F2 as long-term.
I
Black circles indicate
normalization.
Troy Peterson Kling & Jeffrey Kidwell
18/28
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
ART-2
Short-term memory equations
19/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
ART-2
Short-term memory equations
X
pi = ui +
g (yj )zji
qi =
j
pi
e + ||pi ||
vi
ui =
e + ||vi ||
vi = f (xi ) + bf (qi )
wi = Ii + aui
xi =
wi
e + ||wi ||
19/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
ART-2
Short-term memory equations
X
pi = ui +
g (yj )zji
qi =
j
pi
e + ||pi ||
vi
ui =
e + ||vi ||
vi = f (xi ) + bf (qi )
wi = Ii + aui
xi =
wi
e + ||wi ||
Filter function
19/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
ART-2
Short-term memory equations
X
pi = ui +
g (yj )zji
qi =
j
pi
e + ||pi ||
vi
ui =
e + ||vi ||
vi = f (xi ) + bf (qi )
wi = Ii + aui
xi =
Filter function
f (x) =
wi
e + ||wi ||
0 if 0 ≤ x < θ
x if x ≥ θ
(15)
19/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
ART-2
Short-term memory equations
X
pi = ui +
g (yj )zji
qi =
j
pi
e + ||pi ||
vi
ui =
e + ||vi ||
vi = f (xi ) + bf (qi )
wi = Ii + aui
xi =
Filter function
f (x) =
wi
e + ||wi ||
0 if 0 ≤ x < θ
x if x ≥ θ
And lots more!
Troy Peterson Kling & Jeffrey Kidwell
(15)
19/28
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Modified ART-2
I
ART-2 is capable of performing basic noise reduction.
20/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Modified ART-2
I
ART-2 is capable of performing basic noise reduction.
I
We are in the process of modifying it so that it has similar
properties to the non-local means filter.
20/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Modified ART-2
I
ART-2 is capable of performing basic noise reduction.
I
We are in the process of modifying it so that it has similar
properties to the non-local means filter.
I
The modified ART-2 neural network takes a sequence of
overlapping windows as input patterns.
20/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Modified ART-2
I
ART-2 is capable of performing basic noise reduction.
I
We are in the process of modifying it so that it has similar
properties to the non-local means filter.
I
The modified ART-2 neural network takes a sequence of
overlapping windows as input patterns.
I
Performing categorization on these input patterns tells us
which windows are most similar.
20/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Modified ART-2
I
ART-2 is capable of performing basic noise reduction.
I
We are in the process of modifying it so that it has similar
properties to the non-local means filter.
I
The modified ART-2 neural network takes a sequence of
overlapping windows as input patterns.
I
Performing categorization on these input patterns tells us
which windows are most similar.
I
From there, principles from non-local means can be applied to
reduce noise in the image.
20/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
Local Filters
Non-local Filters
Modified ART-2
I
ART-2 is capable of performing basic noise reduction.
I
We are in the process of modifying it so that it has similar
properties to the non-local means filter.
I
The modified ART-2 neural network takes a sequence of
overlapping windows as input patterns.
I
Performing categorization on these input patterns tells us
which windows are most similar.
I
From there, principles from non-local means can be applied to
reduce noise in the image.
I
No results yet.
20/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
The Numbers
Results for SAR Images
Future Work
Questions
Final Remarks
I
Non-local means
outperforms all other
filters by a sizeable
margin.
Filter
NL-M
Lee’s
Conv.
Fourier
Boxcar
ART-2
RMSE
6.16
8.74
9.51
10.20
10.44
N/A
PSNR
32.34
29.3
28.57
27.96
27.75
N/A
Big-O
O(n2 w 2 k 2 )
O(n2 k 2 )
O(n2 k 2 )
O(n2 log(n))
O(n2 k 2 )
O(?)
Note: Assuming the image is square.
21/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
The Numbers
Results for SAR Images
Future Work
Questions
Final Remarks
I
I
Non-local means
outperforms all other
filters by a sizeable
margin.
Non-local means is
particularly well-suited for
SAR images.
Filter
NL-M
Lee’s
Conv.
Fourier
Boxcar
ART-2
RMSE
6.16
8.74
9.51
10.20
10.44
N/A
PSNR
32.34
29.3
28.57
27.96
27.75
N/A
Big-O
O(n2 w 2 k 2 )
O(n2 k 2 )
O(n2 k 2 )
O(n2 log(n))
O(n2 k 2 )
O(?)
Note: Assuming the image is square.
21/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
The Numbers
Results for SAR Images
Future Work
Questions
Final Remarks
I
Non-local means
outperforms all other
filters by a sizeable
margin.
I
Non-local means is
particularly well-suited for
SAR images.
I
We expect our modified
ART-2 algorithm to
perform better than Lee’s
filter.
Filter
NL-M
Lee’s
Conv.
Fourier
Boxcar
ART-2
RMSE
6.16
8.74
9.51
10.20
10.44
N/A
PSNR
32.34
29.3
28.57
27.96
27.75
N/A
Big-O
O(n2 w 2 k 2 )
O(n2 k 2 )
O(n2 k 2 )
O(n2 log(n))
O(n2 k 2 )
O(?)
Note: Assuming the image is square.
21/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
The Numbers
Results for SAR Images
Future Work
Questions
Results for SAR Images
I
So far we have seen image
filters applied to standard
photographs.
22/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
The Numbers
Results for SAR Images
Future Work
Questions
Results for SAR Images
I
So far we have seen image
filters applied to standard
photographs.
I
How well do these same
filters work on synthetic
aperture radar images?
22/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
The Numbers
Results for SAR Images
Future Work
Questions
Results for SAR Images
I
So far we have seen image
filters applied to standard
photographs.
I
How well do these same
filters work on synthetic
aperture radar images?
I
Since we don’t know what
the “true” de-noised
image looks like, we have
to judge it by eye.
22/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
The Numbers
Results for SAR Images
Future Work
Questions
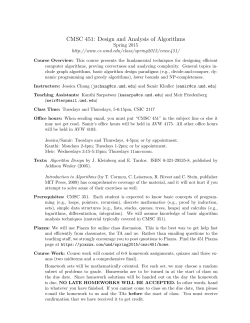
Results for SAR Images
Figure: Top row: Original SAR image; Boxcar; Gaussian convolution.
Bottom row: Lee’s filter; non-local means; FFT filter.
23/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
The Numbers
Results for SAR Images
Future Work
Questions
Results for SAR Images
Figure: Top row: Original SAR image; Boxcar; Gaussian convolution.
Bottom row: Lee’s filter; non-local means; FFT filter.
24/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
The Numbers
Results for SAR Images
Future Work
Questions
Future Work
I
Finish implementing ART-2.
25/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
The Numbers
Results for SAR Images
Future Work
Questions
Future Work
I
Finish implementing ART-2.
I
Try wavelet transforms instead of Fourier transforms.
25/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
The Numbers
Results for SAR Images
Future Work
Questions
Future Work
I
Finish implementing ART-2.
I
Try wavelet transforms instead of Fourier transforms.
I
Make filters work for polarimetric and/or interferometric SAR
images.
25/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
The Numbers
Results for SAR Images
Future Work
Questions
Question #1
1. What is the difference between local and non-local filters, and
why do non-locals filters perform better in most situations?
26/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
The Numbers
Results for SAR Images
Future Work
Questions
Question #1
1. What is the difference between local and non-local filters, and
why do non-locals filters perform better in most situations?
Answer: Local filters estimate each pixel’s true intensity by
looking at the pixels immediately surrounding it. Non-local
filters estimate each pixel’s true intensity by looking at every
pixel in the entire image and performing a weighted average
based on the degree of similarity between windows.
26/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
The Numbers
Results for SAR Images
Future Work
Questions
Question #2
2. The non-local means filter gave the lowest RMSE out of all
the filters we tried, but it’s not the best in every respect.
What is one major drawback of the non-local means
algorithm? (Hint: Think Big-O notation)
27/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
The Numbers
Results for SAR Images
Future Work
Questions
Question #2
2. The non-local means filter gave the lowest RMSE out of all
the filters we tried, but it’s not the best in every respect.
What is one major drawback of the non-local means
algorithm? (Hint: Think Big-O notation)
Answer: The non-local means algorithm has complexity
O(n2 · w 2 · k 2 ), where n is the width of the image (assuming
it is square), w is the width of the search window, and k is
the width of similarity window. For even modestly large values
of n, w , and k, non-local means takes a very long time to
finish running.
27/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
The Numbers
Results for SAR Images
Future Work
Questions
Question #3
3. For the Lee filter, how does the adaptive filtering coefficient,
k, affect the filtering procedure?
28/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
The Numbers
Results for SAR Images
Future Work
Questions
Question #3
3. For the Lee filter, how does the adaptive filtering coefficient,
k, affect the filtering procedure?
Answer: Homogeneous regions of the image produce k values
close to zero, which causes the Lee filter to act more like a
Boxcar filter. Heterogeneous regions of the image that
contain a lot of variation produce k values close to one, which
sets the filtered pixel value equal to the unfiltered pixel value.
28/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
The Numbers
Results for SAR Images
Future Work
Questions
Question #4
4. What was the ART-2 system originally designed for, and how
can it be applied to noise reduction?
29/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima
Outline
Introduction
Image Filtering Algorithms
Conclusion
The Numbers
Results for SAR Images
Future Work
Questions
Question #4
4. What was the ART-2 system originally designed for, and how
can it be applied to noise reduction?
Answer: The ART-2 neural network was originally designed
for categorization/classification of signal patterns. ART-2 can
be applied to noise reduction in several ways - one of which is
by categorizing overlapping windows in the image and then
applying a filter function for each category.
29/28
Troy Peterson Kling & Jeffrey Kidwell
Algorithms for Reducing Noise in Synthetic Aperture Radar Ima









© Copyright 2026