
Document 243566
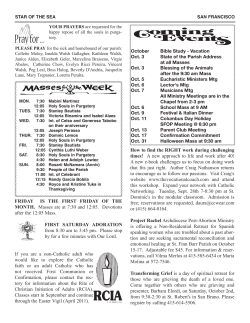
Numerical Methods for Computational Science and Engineering Numerical Methods for Computational Science and Engineering Introduction Topics of today I I I Learn simple and effective iterative methods for problems where direct methods are ineffective. Analyze methods to see when and where they can be applied and how effective they are. Understand modern algorithms, specifically preconditioned conjugate gradients Numerical Methods for Computational Science and Engineering References Lecture 10, Oct 21, 2013: Linear systems: iterative methods I I Peter Arbenz I I Computer Science Department, ETH Z¨ urich E-mail: [email protected] NumCSE, Lecture 10, Oct 21, 2013 1/38 Numerical Methods for Computational Science and Engineering 2/38 Comparison of direct and iterative linear solvers Why not use a direct method? Comparison of direct and iterative linear solvers Direct solvers + Computation is numerically stable in many relevant cases. + Can solve economically for several right-hand sides. + Accuracy can be improved via ‘iterative refinement.’ + ‘Essentially’ a black box. − But: fill-in limits usefulness (memory, flops). A nonsingular n × n. Iterative method: Starting from initial guess x0 , generate iterates x1 , x2 , . . . , xk , . . ., hopefully converging to solution x. But why not simply use LU decomposition, or x = A \ b Iterative solvers + Only a rough approximation to x is required. + A good x0 approximating x is known (warm start) + Matrix often only implicitly needed via matvec product. −− Good preconditioner often necessary for convergence. −− Quality often dependent on ‘right’ choice of parameters, e.g. start vector, basis size, restart (see that later). in Matlab? The matrix size n must be large, and the matrix A must be somehow special to consider iterative methods. NumCSE, Lecture 10, Oct 21, 2013 NumCSE, Lecture 10, Oct 21, 2013 Numerical Methods for Computational Science and Engineering Comparison of direct and iterative linear solvers Ax = b, U. Ascher & C. Greif: Numerical methods. Chapter 7. Y. Saad: Iterative Methods for Sparse Linear Systems. SIAM, 2003. 2nd ed. Barrett et al.: Templates for the Solution of Linear Systems. SIAM, 1994. Online at URL http://www.netlib.org/ linalg/html_templates/Templates.html. 3/38 NumCSE, Lecture 10, Oct 21, 2013 4/38 Numerical Methods for Computational Science and Engineering Numerical Methods for Computational Science and Engineering Comparison of direct and iterative linear solvers Comparison of direct and iterative linear solvers Typical scenarios The ubiquitous Poisson problem Direct solvers I Inverse Iteration I Determinants I Many linear systems with the same matrix A I ‘Difficult’ applications (e.g. circuit simulation) ∆u(x) = f (x) in domain Ω and boundary conditions I Stationary temperature distribution. I Electrical potential due to charged distribution (particles). I Gravitational potential due to mass distribution. Iterative solvers I Inexact Newton-Methods I Many linear systems with ‘slightly changing’ matrices I Matrix-free applications (e.g. matvec product via FFT) I Very large problems NumCSE, Lecture 10, Oct 21, 2013 5/38 Numerical Methods for Computational Science and Engineering NumCSE, Lecture 10, Oct 21, 2013 6/38 Numerical Methods for Computational Science and Engineering Comparison of direct and iterative linear solvers Comparison of direct and iterative linear solvers Somewhat similar problems Test problem: Poisson equation on square Linear elasticity problems (forces → displacements → stresses / strains) Let us consider the Poisson equation on a rectangular domain Ω = [0, 1]2 ∂2 ∂2 u(x, y ) − u(x, y ) = f (x, y ), ∂x 2 ∂y 2 u(x, y ) = p(x, y ) on ∂Ω, −∆u(x, y ) = − We define a rectangular grid with grid points that are a distance h apart. In each grid point the Laplacian of u can be expanded as Maxwell equation (electric / magnetic fields → acceleration of particles) −∆u(x, y ) = − = NumCSE, Lecture 10, Oct 21, 2013 7/38 NumCSE, Lecture 10, Oct 21, 2013 ∂ ∂ u(x, y ) − 2 u(x, y ) 2 ∂x ∂y 1 (4u(x, y ) − u(x + h, y ) − u(x − h, y ) h2 −u(x, y + h) − u(x, y − h)) + O(h2 ) 8/38 Numerical Methods for Computational Science and Engineering Numerical Methods for Computational Science and Engineering Comparison of direct and iterative linear solvers Comparison of direct and iterative linear solvers Test problem: Poisson equation on square (cont.) Test problem: Poisson equation on square (cont.) Let xi = ih, yj = jh, 0 ≤ i, j ≤ N + 1. Then −∆u(xi , yj ) ≈ 1 (4u(xi , yj ) − u(xi+1 , yj ) − u(xi−1 , yj ) h2 −u(xi , yj+1 ) − u(xi , yj−1 )) for 0 < i, j < N + 1. The discretized equation now becomes 1 (4u(xi , yj ) − u(xi+1 , yj ) − u(xi−1 , yj ) − u(xi , yj+1 ) − u(xi , yj−1 )) h2 = f (xi , yj ). or 4u(xi , yj )−u(xi+1 , yj )−u(xi−1 , yj )−u(xi , yj+1 )−u(xi , yj−1 ) = h2 f (xi , yj ). NumCSE, Lecture 10, Oct 21, 2013 9/38 Numerical Methods for Computational Science and Engineering NumCSE, Lecture 10, Oct 21, 2013 10/38 Numerical Methods for Computational Science and Engineering Comparison of direct and iterative linear solvers Comparison of direct and iterative linear solvers Test problem: Poisson equation on square (cont.) Test problem: Poisson equation on square (cont.) At the near-boundary points, the prescribed boundary values are pluged in. If, e.g., i = 1 and 1 ≤ j ≤ N we have u1,1 u2,1 .. . uN,1 u1,2 u = u2,2 , .. . uN,2 u1,3 .. . uN,N 1 (4u(x1 , yj ) − u(x2 , yj ) − p(x0 , yj ) − u(x1 , yj+1 ) − u(x1 , yj−1 )) h2 = f (x1 , yj ). We arrange the unknowns u(x1 , y1 ), u(x1 , y2 ), . . . , u(xN , yN ) ‘row-wise’ in a vector u ∈ Rn , n = N 2 : u(xi , yj ) ∼ u(i−1)N+j , 1 ≤ i, j ≤ n. Similarly for f : f(i−1)N+j ∼ h2 f (xi , yj ). b1,1 b2,1 .. . bN,1 b1,2 b = b2,2 , .. . bN,2 b1,3 .. . bN,N bi,j = h2 f (xi , yj ). Au = b NumCSE, Lecture 10, Oct 21, 2013 11/38 NumCSE, Lecture 10, Oct 21, 2013 12/38 Numerical Methods for Computational Science and Engineering Numerical Methods for Computational Science and Engineering Comparison of direct and iterative linear solvers Comparison of direct and iterative linear solvers Structure of a Poisson matrix Eigenvalues of the Poisson matrix For any size N the matrix A is diagonally dominant and nonsingular. It is also a Toeplitz matrix. It can be verified directly that the n = N 2 eigenvalues of A are given by (recall (N + 1)h = 1) λi,j = 4 − 2(cos(iπh) + cos(jπh)), λmin ≈ 2π 2 h2 , λmax ≈ 4. Thus λi,j > 0 for all 1 ≤ i, j ≤ N, and we see that the matrixA is also positive definite. Knowing the eigenvalues explicitly is helpful in understanding performance, convergence and accuracy issues related to linear solvers. Matlab spy of a matrix discretization of the Poisson equation −∆u = f in Ω = (0, 1)2 , u = 0 on ∂Ω, with finite differences on a 10 × 10 grid (N = 10). NumCSE, Lecture 10, Oct 21, 2013 1 ≤ i, j ≤ N. 13/38 Numerical Methods for Computational Science and Engineering NumCSE, Lecture 10, Oct 21, 2013 14/38 Numerical Methods for Computational Science and Engineering Stationary iterative methods Stationary iterative methods Motivation Motivation Stationary iterative methods: Motivation Stationary iterative methods: Motivation (cont.) Let M be an invertible matrix with the following properties Let A be so large that it is impossible to compute its LU factorization (fill-in). Then, we try to solve Ax = b iteratively. Let xk be an approximation to the solution x∗ of Ax = b. Then 1. M is a good approximation to A. 2. Mz = r can be solved (relatively) cheaply. 3. M can be formed (relatively) cheaply. x∗ = xk + ek |{z} error ∗ Aek = Ax − Axk = b − Axk =: x∗ = xk + A−1 rk Then, instead of solving (1) we iterate according to rk |{z} residual rk xk+1 (2) (1) M is called a preconditioner. Of course, the above assumption prevents us from solving (1) for the error ek . NumCSE, Lecture 10, Oct 21, 2013 = b − Axk = xk + M −1 rk 15/38 NumCSE, Lecture 10, Oct 21, 2013 16/38 Numerical Methods for Computational Science and Engineering Numerical Methods for Computational Science and Engineering Stationary iterative methods Stationary iterative methods Motivation Theory Stationary iterative methods: Motivation (cont.) Stationary iterative methods: Theory Practical procedure: Definition (Matrix splitting) rk = b − Axk Mzk = rk Let A be nonsingular. Then A = M − N, with M nonsingular, is called a matrix splitting. (Compute residual) (Solve with preconditioner) xk+1 = xk + zk (Update approximate) We consider the iteration Remarks: I In step 1, we have to multiply a matrix with a vector. In practice: we need to have a procedure that computes y ← Ax. I In step 2, we have to solve a system of equations with the preconditioner which is “by definition” relatively easy to do. This step is usually the most expensive one. NumCSE, Lecture 10, Oct 21, 2013 xk+1 = xk + M −1 rk ⇐⇒ Mxk+1 = Nxk + b. Note: 17/38 Numerical Methods for Computational Science and Engineering I If M −1 = A−1 , then one-step convergence: xk+1 = A−1 b. I In practice, M −1 should be a good (but cheaper to invert) approximation to A−1 (‘preconditioner’). NumCSE, Lecture 10, Oct 21, 2013 18/38 Numerical Methods for Computational Science and Engineering Stationary iterative methods Stationary iterative methods Theory Theorem on convergence Formulation as fixed-point iteration Theorem on convergence Theorem (Convergence theorem for stationary iterations) xk+1 = xk + M −1 rk = M −1 (Mxk + rk ) Let A = M − N be a matrix splitting with M invertible. Then, = M −1 ((M − A)xk + b) −1 −1 = M | {z N} xk + M | {z b}, =: c =: G (1) The iteration N = M − A. Mxk+1 = Nxk + b, (+) converges for any x(0) if and only if ⇒ xk+1 = G xk + c fixed point iteration ρ(G ) < 1, G = M −1 N = I − M −1 A is called the iteration matrix. G = M −1 N = I − M −1 A. (2) If, for any vector norm, kG k < 1, then iteration (+) converges. Theorem.The error satisfies ek+1 = G ek . Proof: With fixed point x∗ = A−1 b, one has x∗ = G x∗ + c. NumCSE, Lecture 10, Oct 21, 2013 19/38 NumCSE, Lecture 10, Oct 21, 2013 20/38 Numerical Methods for Computational Science and Engineering Numerical Methods for Computational Science and Engineering Stationary iterative methods Stationary iterative methods Theorem on convergence Theorem on convergence Convergence rate Remarks I Earlier we derived a convergence rate for fixed point iterations xk+1 = g (xk ) for solving nonlinear systems. I I Here, the situation is similar: xk+1 = g (xk ) = G xk + c. I I How many iteration steps are required to reduce the error norm by an order of magnitude? 0.1ke0 k = ρ(G )k ke0 k. k≈ −1 log10 ρ(G ) I 1 ≈ − log10 ρ(G ). k The rate is higher (faster convergence), the smaller ρ. rate = NumCSE, Lecture 10, Oct 21, 2013 (1) in the convergence theorem is based entirely on the eigenvalues of the iteration matrix G . There is however a big difference of the convergence behavior of normal (diagonalizable by a unitary matrix) and nonnormal matrices: Compare the behavior of the error norm p p in Matlab of kek k (e0 = [ 1/2, 1/2]T ) with the two matrices 0.9 0 0.9 10 , . 0 0.9 0 0.9 Pay attention on the norm! E.g., 0.1 −0.4 G= . −0.4 0.8 Here, kG k∞ = 1.2, kG k2 = maxi |λi (G )| = 0.9815. 21/38 Numerical Methods for Computational Science and Engineering NumCSE, Lecture 10, Oct 21, 2013 22/38 Numerical Methods for Computational Science and Engineering Stationary iterative methods Stationary iterative methods: practical schemes Theorem on convergence Jacobi iteration Practicalities Practical schemes: Jacobi and Gauss–Seidel iteration Starting vector, iterates & convergence Improve initial vector x(0) so that xk → x∗ = A−1 b in fewer steps. Let A = L + D + U where D is diagonal, L is strictly lower triangular and U is strictly upper triangular. Let E = D + L. Where to get x(0) from? There are various possibilities (some better than others): D=diag(diag(A)); I Zero/random vector. I Insights into underlying problem. I Solution from a ‘similar’ previously-solved problem. 7 A = −3 1 Stopping criterion A few practical possibilities I krk k ≤ τ kbk. I krk k ≤ τ kr(0) k. NumCSE, Lecture 10, Oct 21, 2013 E = tril(A) 3 1 10 2 7 −15 Jacobi iteration: ⇒ NumCSE, Lecture 10, Oct 21, 2013 0 10 7 0 0 −15 xk+1 = xk + D −1 rk Gauss–Seidel iteration: 23/38 7 0 0 7 0 , E = −3 D = 0 10 0 0 −15 1 xk+1 = xk + E −1 rk 24/38 Numerical Methods for Computational Science and Engineering Numerical Methods for Computational Science and Engineering Stationary iterative methods: practical schemes Stationary iterative methods: practical schemes Jacobi iteration Jacobi iteration Jacobi example Gauss–Seidel example 7x1 = 3 − 10x2 − x3 , 7x1 = 3 − 10x2 − x3 , 10x2 = 4 + 3x1 − 2x3 , 10x2 − 3x1 = 4 − 2x3 , −15x3 = 2 − x1 − 7x2 . −15x3 + x1 + 7x2 = 2. Evaluate right hand side at current iterate k and left hand side as unknown at step k + 1: (k+1) x1 (k+1) x2 (k+1) x3 Evaluate right hand side at current iterate k and left hand side as unknown at step k + 1: 1 (k) (k) 3 − 10x2 − x3 , 7 1 (k) (k) = 4 + 3x1 − 2x3 , 10 −1 (k) (k) = 2 − x1 − 7x2 . 15 (k+1) = x1 (k+1) x2 (k+1) x3 1 (k) (k) 3 − 10x2 − x3 , 7 1 (k+1) (k) = 4 + 3x1 − 2x3 , 10 −1 (k+1) (k+2) = 2 − x1 − 7x2 . 15 = Always use most recent information. NumCSE, Lecture 10, Oct 21, 2013 25/38 Numerical Methods for Computational Science and Engineering Stationary iterative methods: practical schemes Properties of Jacobi and Gauss-Seidel relaxation Successive Over-Relaxation (SOR) Properties of Jacobi and Gauss-Seidel relaxation Jacobi more easily parallelized I Jacobi matrix M is symmetric I GS converges whenever Jacobi converges and often (but not always) twice as fast I Both methods are simple but slow. Used as building blocks for faster, more complex methods. 26/38 Numerical Methods for Computational Science and Engineering Stationary iterative methods: practical schemes I NumCSE, Lecture 10, Oct 21, 2013 Over-relaxation and under-relaxation Let xk+1 be obtained from xk by Jacobi or GS. Modify it further by xk+1 ← ωxk+1 + (1 − ω)xk where ω is a parameter. Two useful variants: I Based on Gauss-Seidel (GS) and 1 < ω < 2, obtain faster successive over-relaxation (SOR). xk+1 = xk + ω[(1 − ω)D + ωE ]−1 rk ≡ xk + Mω−1 rk . I Based on Jacobi and ω ≈ 0.8, obtain slower under-relaxation which is a good smoother in some applications. xk+1 = xk + ωD −1 rk . NumCSE, Lecture 10, Oct 21, 2013 27/38 NumCSE, Lecture 10, Oct 21, 2013 28/38 Numerical Methods for Computational Science and Engineering Numerical Methods for Computational Science and Engineering Stationary iterative methods: practical schemes Stationary iterative methods: practical schemes Successive Over-Relaxation (SOR) Successive Over-Relaxation (SOR) Optimal parameter for SOR Optimal parameter for SOR (cont.) 4. For matrices of the form tridiag[-1, 2, -1], the above formula holds, and ωopt can be simplified to the following formula: 1. ω = 1: back to Gauss–Seidel. 2. For many matrices there is a known optimal parameter for SOR: ωopt . ωopt = 3. For a large class of matrices, the optimal parameter is given by ωopt = 2 q > 1, 1 + 1 − ρ2J 2 π , 1 + sin n+1 where n is the dimension of the matrix. 5. For this class of matrices ρ(G (ωopt )) = ωopt − 1. 6. Poisson matrix: gallery(’poisson’,m) is n × n matrix with n = m2 2 2 ωopt = = π π . 1 + sin √n+1 1 + sin m+1 with ρJ the spectral radius of the Jacobi iteration matrix. 7. Once the optimal parameter is used, convergence is incredibly faster than Jacobi or Gauss–Seidel. NumCSE, Lecture 10, Oct 21, 2013 29/38 Numerical Methods for Computational Science and Engineering Stationary iterative methods: practical schemes Successive Over-Relaxation (SOR) Block iterations Symmetric Successive Over-Relaxation (SSOR) Practical schemes: Block iterations Combination of standard forward and ‘backward’ SOR: 1 Let e ω x(k+1) = N e ω x(k+ 12 ) + b, M I A12 A22 .. . A1m A2m .. . Amm Block Jacobi iteration M = diag(A11 , A22 , . . . , Amm ) Block Gauss–Seidel iteration Usually only used when A symmetric, i.e. U = LT . A11 A21 M= . .. Symmetric Gauss–Seidel: SSOR(ω = 1). A22 .. . Am1 Am2 NumCSE, Lecture 10, Oct 21, 2013 ··· ··· Am1 Am2 · · · e ω = 1 − ω D − L. N ω Note: I A11 A21 A= . .. with ‘backward’ SOR e ω = 1 D + U, M ω 30/38 Numerical Methods for Computational Science and Engineering Stationary iterative methods: practical schemes Mω x(k+ 2 ) = Nω x(k) + b, NumCSE, Lecture 10, Oct 21, 2013 31/38 NumCSE, Lecture 10, Oct 21, 2013 .. . ··· Amm 32/38 Numerical Methods for Computational Science and Engineering Numerical Methods for Computational Science and Engineering Stationary iterative methods: practical schemes Stationary iterative methods: practical schemes Matlab Matlab MATLAB - Experiment if (nargin < 6), tol = eps; end if (nargin < 5), x = zeros(size(A,1),1); end function [x,k] = statit(A,M,M2,b,x,tol) %STATIT Stationary Iteration % % x^{k+1} = x^{k} + M \ r^{k}, r^{k} = b - A x^{k} % for solving A x = b % % [x,k] = statit(A,M1,M2,b,x,tol) % Input: A system matrix % M1,M2 M = M1*M2 ‘preconditioner’ % (M2 = [] indicates M2=identity) % b right hand side % x initial vector x^{0} (default x = 0) % tol (default tol = eps) % Output: x approximate solution % k number of iteration until convergence % convergence criterion: % norm(b - A*x) <= tol*norm(b - A*x0) NumCSE, Lecture 10, Oct 21, 2013 r = b - A*x; rnrm0 = norm(r); rnrm = rnrm0; for k=1:5000 if isempty(M2), x = x + M\r; else x = x + M2\(M\r); end r = b - A*x; rnrm = norm(r); if rnrm < tol*rnrm0, return, end end 33/38 Numerical Methods for Computational Science and Engineering 34/38 Numerical Methods for Computational Science and Engineering Stationary iterative methods: practical schemes Stationary iterative methods: practical schemes Matlab Matlab Poisson equation on square 11 × 11 - grid Poisson equation on slightly larger grids m=11; A=gallery(’poisson’,m); b = A*[1:m2 ]’; tol = 1e-6, x = zeros(m2 ,1) Solver Jacobi Block Jacobi Gauss–Seidel Block Gauss–Seidel SGS (A s.p.d.) Block SGS SOR(ω = 1.6) Block SOR(ω = 1.5) NumCSE, Lecture 10, Oct 21, 2013 MATLAB M = D = diag(diag(A)) M= DB = triu(tril(A,1),-1) M=tril(A) M=tril(A,1) M1 =tril(A)/sqrt(D); M2 = M1T M1 =tril(A,1)/chol(DB ); M2 = M1T D/omega + tril(A,-1) triu(tril(A,1),-1)/omega + tril(A,-m) solver Jacobi Block Jacobi Gauss–Seidel Block Gauss–Seidel SSOR (ω = 1.8) Block SSOR (ω = 1.8) nit 341 176 174 90 90 48 32 24 n = 312 2157 1093 1085 547 85 61 n = 632 7787 3943 3905 1959 238 132 Table 1: Iteration steps for solving the Poisson equation on a 31-by-31 and on a 63-by-63 grid with an relative residual accuracy of 10−6 . Note: The generation of M for the blocked versions is specific to this problem! NumCSE, Lecture 10, Oct 21, 2013 35/38 NumCSE, Lecture 10, Oct 21, 2013 36/38 Numerical Methods for Computational Science and Engineering Numerical Methods for Computational Science and Engineering Stationary iterative methods: practical schemes Stationary iterative methods: practical schemes Matlab Matlab Iterative refinement/improvement Iterative refinement/improvement (cont.) % Ex. 2.7 from Schwarz-K"ockler A = [0.29412, 0.41176, 0.52941, 0.42857, 0.57143, 0.71429, 0.36842, 0.52632, 0.42105, 0.38462, 0.53846, 0.46154, b = [0.17642, 0.21431, 0.15792, Let Ax = b be solved via GEPP, PA = LU. We wish to improve the accuracy of the computed solution ˆ x. If we execute r = b − Aˆ x Solve L y = Pr Solve U z = y 0 ˆ x =ˆ x+z then, in exact arithmetic, Aˆ x0 = A ˆ x + A z = (b − r) + r = b. Attention: the residual ˆr must be computed with higher precision! Otherwise there may be no improvement. 10α Heuristic: In computation with d decimal digits and κ∞ (A) = d − α digits can be gained per step. (At most d correct digits.) NumCSE, Lecture 10, Oct 21, 2013 37/38 on iterative improvement 0.58824; 0.64286; 0.36842; 0.38462] 0.15380]’ x = single(A)\single(b); r = b - A*x r = b - A*double(x) % solve A*x=b in single precision % residual in single precision % residual in double precision X = A\b; R = b - A*X % solve A*x=b in double precision % residual in double precision x-X, r-R z = single(A)\r; x = x + z % correct single prec. x using double % prec. residual NumCSE, Lecture 10, Oct 21, 2013 38/38






© Copyright 2026