
Contents 1 2 9
Contents 1. Contact info 2. Why? 3. Axioms and some consequences 3.1. Euclid 3.2. Hilbert 3.3. Construction 4. Angles and areas 4.1. Angles in a triangle 4.2. Parallelogram 4.3. Area and length 5. Triangles 5.1. SSS and triangle inequality 5.2. Proportion and similarity 5.3. Ceva and Menelaus 5.4. Centers of a triangle 6. Circles 6.1. Arcs and angles 6.2. Properties of circle 6.3. Nine point circle 6.4. Cyclic quadrilaterals 7. Constructibility 7.1. Constructible lengths 7.2. Polygons and non-constructibility 8. Transformations 8.1. Klein 8.2. Translation 8.3. Rotation 8.4. Reflection 8.5. Similarity transformation 8.6. Inversion 9. Non-Euclidean geometries 9.1. Projective geometry 9.2. Hyperbolic geometry 1 1 2 2 2 9 9 10 11 12 13 13 14 17 19 20 20 23 26 27 30 30 31 32 32 34 34 36 37 37 39 39 42 1. Contact info • • • • • • Instructor: Shengda Hu Office: BA547 (Bricker Academic) Office Hours: Wednesday 13:30 - 15:00, Thursday 9:20 - 10:00 And by appointment via email. Contact info: phone: ext. 2223, email: [email protected]. Lectures: Monday, Wednesday, Friday, 11:30-12:20 (Room: DAWB 2-106) Text: A. Berele and J. Goldman, Geometry: Theorems and Constructions, Prentice Hall, 2000 2. Why? The short answer is: because it’s there. This is also the answer given by a certain famous mountaineer, when he was asked why. 1 The longer answer is: because most of our day to day life runs on Euclidean Geometry, it teaches a way of thinking rigorously while at the same time relying on intuitions, it is a beautiful subject (for many reasons). One can come up with many more, but let’s stop here. You will need to have a geometry set. I’m still figuring out what to do with mine. 3. Axioms and some consequences By definition, all of Euclidean Geometry is the consequence of its axioms. 3.1. Euclid. Euclid had five postulates, they are the following; (1) A straight line can be drawn from any point to any other point (2) A finite straight line may be extended continuously in a straight line (3) A circle may be described with any center and any radius (4) All right angles are equal to one another (5) If a straight line meets two other straight lines so as to make the two interior angles on one side of it together less than two right angles, the other straight lines, if extended infinitely, will meet on that side on which the angles are less than two right angles. In stating these postulates this way, Euclid basically took for granted certain concepts and relations, or thought them to be automatically clear. Then he built his Elements starting from these statements, using only logic derivations. It’s a double edged sword when he used physical language – drawn, extend, described, meets, etc. They are both subjective and objective if used through out. For example, one can argue that there is an equilateral triangle by drawing one on a piece of paper, while it maybe countered with the drawing is not exactly precise, and careful measurements will show there are tiny difference. On the other hand, such arguement for non-existence of an equilateral triangle can be countered with if someone has a very steady hand and precise tool, it can be drawn. It can keep on going like this with no end. This is part of the reason modern axioms systems arise to replace the five postulates. The last postulate is the one gets most of the coverage, as the fifth postulate, or parallelism postulate. Much effort was spent trying to prove it from the rest of the postulates – all of which failed. In the mean time, these efforts showed that there are shortcomings in how the postulates were stated, and people started revising and completing them. After long time, it was established that the parallel postulate is indeed independent to the rest of the postulates – meaning that the its truthfulness does not affect any of the rest of the postulates; it was also established that the postulates are insufficient mathematically, and was made rigorous. Gauss, Lobachevsky, Bolyai, Riemann are among the names that should be mentioned. The axioms I will put down are the ones by Hilbert, from the around the beginning of the last century – more than 100 years ago. Most of them will be quite intuitive, but some do need thoughts on why they are needed. We will not argue endlessly on the how and why’s of the axioms system we will use for Euclidean Geometry. Instead, I will write them down, explaining how to think of them and what results they help to derive. 3.2. Hilbert. The main difference between the modern axioms and Euclidean postulates is The terms involved are undefined and besides what the axioms state, there is no more meaning associated to any of the terms. The axioms do not pretend to have anything to do with physical world. In order to use or apply the axiom systems, one needs to interprete the terms. Interpreting the terms in an axiom means to replace it by well defined objects. If the interpretations of all the terms in the axioms turn the axioms into true statements for the objects involved, then the interpretations form a model. Logical derivation only needs to happen on the level of axiom systems. Then whatever comes out will be able to fit the interpretation and leads to knowledge about the models. Different models can 2 be associated to the same axiom system. The relation of axiom system and model is like the relation of blue prints and building. Using the same blue prints, one can build different sized models, or real buildings, in wood, steel, or plastic, for example. Ther are two benefits: To understand how all these buildings work, one really just have to study their common blue print carefully. Or since they share the same blue prints, one only need to study any one of the models to understand how all the versions work. The point of the second one is that in some situation, one particular model could be easier to deal with (for example more intuitive) than others. 3.2.1. Fundamental terms. In Hilbert’s axioms, they are: points, lines (objects) and incident to (relation). A point p is incident to a line ` maybe interpreted as the point p lies on the line `. From these fundamental ones, more relations can be defined. You might realize that the terms like angles, right angles and circles or even parallel are not fundamental (as suggested by Euclid) and need to be defined from the three fundamental terms (using the axioms below). Example 3.1. Use these fundamental terms to define • the lines ` and `0 intersect at the point p • the lines ` and `0 are parallel lines • the points A, B and C are colinear • the lines `1 , `2 , `3 are concurrent 3.2.2. Incidence axioms : planar. The first set of axioms put restrictions on the incidence relation (1) There is a unique line ` incident to any two distinct points A and B (2) For any line `, there exist at least two distinct points incident to ` (3) There exists at least 3 distinct non-colinear points. The first two replace the postulate 1 and the third one states that this is at least planar geometry. Example 3.2. Interpreting points as lines on a plane; lines as points on the same plane; and a line ` is incident to a point P iff P lies on the line `. Then all the incidence axioms are true again. This shows that under incidence axioms, the notion of points and lines are dual to each other. Example 3.3. The first incidence axiom implies that two distinct lines intersect at most at one point. 3.2.3. In-between-ness axioms : planar. These involve a new term in between that is undefined, and the axioms relate this undefined notion with the incidence relation. (1) A point B is in between points A and C means that A, B and C are colinear, and B is also in between points C and A. Given three points on a line, then one and only one of them lies in between the other two (2) Given any two points A and B, there exists points C, D and E on the line determined by A and B such that C is in between A and B; A is in between B and D; and B is in between A and E (3) For every line ` and any three points A, B and C not incident to `: • if A and B are on the same side of ` and B and C are on the same side of `, then A and C are on the same side of ` • if A and B are on the opposite side of ` and B and C are on the opposite side of `, then A and C are on the same side of ` The first two replaces the postulate 2, and the third one again states the geometry is planar (as only on a plane, there are two sides of a line). More precisely, the first axiom defines the new relation in-between, and the second axiom replaces the physical word extend with this new notion of in-between-ness. Example 3.4. Give a definition of a segment, a ray, a angle and a triangle. In the third axiom, the new terms same side or opposite sides of a line ` needs to be defined from the terms that were defined 3 previously. Half-planes and the interior of an angle can be defined with the help of the third axiom. With these definitions, give a definition of the in-between-ness of rays and interior of triangles. Example 3.5. Continue with Example ??. Interpreting in-between-ness as the in-between-ness of num0 00 bers, that is, reduced fraction pq with p odd is in-between the reduced fractions pq0 and pq00 with p0 and p00 odd iff p q lies in-between p0 q0 and p00 . q 00 Which ones of the axioms above are true statements? Remark 3.6. It is very intuitive to think of a line as the set of points which are incident to it. But this way of interpretation is NOT implied by the axioms. Instead, it depends on the interpretation or model. This is a subtle point. With the risk of confusion, we will still use set theoretic notations when dealing with lines and segments, such as ` ∩ `0 = p to denote intersection of two lines at a point, or AC ∪ CB = AB when C is in between A and B and AC etc denote segments. Remark 3.7. To prove the statement “a line is divided by a point on it into two opposite rays emanating from the point” that ostensibly is only about lines and points, one needs to use the last axiom which concerns a plane. On the other hand, it’s often the case that higher dimensional statements could be used to derive the corresponding lower dimension ones. This will also be apparent in the relation between area and length. The next intuitive fact used by Euclid without proof is called Pasch’s theorem. The proof contains another intuitive but important law of logic: law of excluded middle. This law is famously applied in real life – where it makes no sense – by people like George Bush and Vic Toews (on his wikipedia page search for C-30). Theorem 3.8 (Pasch’s theorem). If 4ABC is any triangle and ` is any line that incident to a point in between A and B (i.e. intersects the side AB in the interior), then ` intersects either side AC or BC. If C is not incident to `, then ` does not intersect with both AC and BC. Proof: There are only two cases (law of excluded middle): either C is incident to `, for which the statement in the theorem holds; or C is not incident to `, which we deal with next. By hypothesis, A and B lies on the opposite side of ` (definition). C is not incident to `, then there are again two cases (law of excluded middle): C and A are either on the opposite sides or on the same side of `. Now apply the third in-between-ness axiom, the first case implies that ` intersects AC but not BC. Apply the third in-between-ness axiom and law of excluded middle, the second case implies that C and B are on the opposite sides of ` and ` intersects BC but not AC. 3.2.4. Congruence axioms. These involve another undefined term congruent (∼ =), which will be related by axioms to terms appeared before. − (1) For any AB, A 6= B, and any ray → r emanating from any point A0 , there exists a unique point − B 0 6= A0 on → r such that A0 B 0 ∼ = AB ∼ ∼ (2) If AB = CD and AB = EF , then CD ∼ = EF (3) Suppose that B is in between A and C; and B 0 is in between A0 and C 0 . If AB ∼ = A0 B 0 and BC ∼ = B 0 C 0 , then AC ∼ = A0 C 0 −−→ −→ −−→ (4) Given any angle ∠AOB (the rays OA and OB are not opposite), and any side of any O0 A0 −−→ −−→ emanating from any point O0 , there exists a unique O0 B 0 on the given side of O0 A0 such that ∠AOB ∼ = ∠A0 O0 B 0 (5) If ∠A ∼ = ∠B and ∠A ∼ = ∠C, then ∠B ∼ = ∠C (6) If two sides and the included angle of one triangle are congruent respectively to two sides and the included angle of another triangle, then the two triangles are congruent. The first and second axioms on segments and forth and fifth axioms on angles are completely analogous. They show that congruence is an equivalent relation for segments and angles (reflexive, symmetric 4 and transitive). The third axiom is the additive axiom for segments, from which one can derive a statement about subtraction. The sixth axiom is the SAS criterion for triangle congruence, from which the other triangle congruence criteria are derived. One can also establish the angle addition and subtraction using these axioms. Example 3.9. The congruence of two triangles are used in the last axiom with no definition, define it. Example 3.10. Define midpoint of a segment, bisector of an angle. Remark 3.11. Note that by defining it does not implying existence, uniqueness, or what is being defined makes sense at all. This is why well-defined is a important notion, and existence etc. must be proved. A vacuous definition is not necessarily bad. As an example, one can define the notion of a line along a circle, as “all points incident to the line are also incident to the circle”. It is a perfectly fine definition, which nothing will satisfy, i.e. it is vacuous. A bad definition is one that conflicts with itself already. −→ As an example, one can define the trisector of ∠AOB as the unique OC in the interior of ∠AOB such that either ∠AOC or ∠COB is one third of ∠AOB. This again is perfectly worded sentence, while it should be obvious that there should be more than one such rays. When making a definition, there are more subtle problems than what we saw here, one should be wary of them. Remark 3.12. The congruence axioms replace the physical language, for example of moving, superposition, overlap etc. These axioms will be made more concrete later with constructions. The next proposition is again very intuitive. The proof contains a very important method of proof: reductio ad absurdum, or proof by contradiction. To prove a statement, one assumes the negation of what needs to be proven, from this assumption together with the hypothesis in the original statement, one derives an absurd statement (a contradiction to known truths). Proposition 3.13. Given AC ∼ = DF , then for any point in between A and C, there is a unique point E in between D and F such that AB ∼ = DE. −−→ Proof: By the first congruence axiom, there is a unique point E on DF such that AB ∼ = DE. The key is thus to show that E is between D and F , which we will prove by contradiction. Suppose E is not between D and F , then either E = F or F is between D and E. −→ The case E = F implies that AC ∼ = DF = DE ∼ = AB, where B and C two distinct points on AC. Contradicts the first congruence axiom. −→ Suppose then F is between D and E, then on the ray opposite to CA, there is a unique point G, such that F E ∼ = CG. By the third congruence axiom, AG ∼ = DE ∼ = AB, where B and G are two distinct −→ points on AC. Contradicts the first congruence axiom. Thus, E is between D and F . Example 3.14. With Proposition 3.13, an order can be defined for segments. More specifically, two segments AB and CD must satisfy one and only one of the following ( trichotomy): AB > CD, AB ∼ = CD or AB < CD. Define these relations using the axioms. Argue that the relations satisfy the obvious properties, such as AB < CD and CD < EF , then AB < EF . Using the angle congruence axioms and the in-between-ness definition for rays, an order can be defined for angles with a similar proposition. State the corresponding proposition for angles. Define the comparison relations and verify their properties for angles. Definition 3.15. Let ∠AOB and ∠CP D be two angles and let ∠AOB and ∠AOD0 ∼ = ∠CP D be on −−→0 −→ −→ the opposite sides of OA, then ∠AOB and ∠CP D are supplementary if OA and OD are opposite rays. An angle ∠A is a right angle if it is congruent to its supplementary. The angles ∠AOB and ∠A0 OB 0 −−→ −−→ −−→ −→ are vertical angles if the rays OA and OA0 , as well as OB and OB 0 are pairs of opposite rays. 5 One application of the SAS axiom is the following. Proposition 3.16. Supplements of congruent angles are congruent. Proof: B0 B C O C0 A O0 A0 Let ∠AOB ∼ = ∠A0 O0 B 0 . By congruence axioms, it can be chosen such that OA ∼ = O0 A0 , OB ∼ = O0 B 0 . By 0 0 0 0 0 0 ∼ ∼ ∼ SAS, 4AOB = 4A O B , which implies ∠A = ∠A and AB = A B . On the opposite rays of OA and O0 A0 , choose points C and C 0 respectively such that OC ∼ = O0 C 0 . By the third axiom above, AC ∼ = A0 C 0 . 0 0 0 0 0 0 0 0 ∼ ∼ ∼ Again by SAS, 4BAC = 4B A C , which implies that ∠BCA = ∠B C A and BC = B C . By SAS again, 4BCO ∼ = 4B 0 C 0 O0 , which implies that ∠BOC ∼ = ∠B 0 O0 C 0 . Corollary 3.17. Vertical angles are congruent. Corollary 3.18 (Euclid’s postulate (4)). If right angles exist, then they are congruent to each other. Proof: Prove with reductio ad absurdum, using the ordering on angles besides the axioms we have so far. Finish the proof. Example 3.19. A simpler application of SAS is the pons asinorum. If in 4ABC, AB ∼ = AC, then ∠B ∼ = ∠C. Prove it. Such triangles are isosceles triangles. The next proposition gives another example of using SAS. It will become clear that any geometrical identity ultimately relies on these congruence axioms. −−→ −→ −→ −→ Proposition 3.20 (Angle addition). Let OB be a ray in between OA and OC, P E be a ray in between −−→ −→ P D and P F . Suppose that ∠AOB ∼ = ∠DP E and ∠BOC ∼ = ∠EP F . Then ∠AOC ∼ = ∠DP F . Proof: A D B O E P C F The first congruence axiom allows us to assume that the points A, C, D and F are chosen such that −−→ OA ∼ = P D and OC ∼ = P F . Let B be the intersection of OB with AC and the point E is chosen such that OB ∼ = P E. By SAS, 4AOB ∼ = 4DP E and 4BOC ∼ = 4EP F . It follows that ∠ABO ∼ = ∠DEP , ∼ ∼ ∠CBO = ∠F EP and ∠BAO = ∠EDP . As ∠ABO and ∠CBO are supplementary, it follows that −→ −−→ ∠DEP and ∠F EP are supplementary. By the fourth congruence axiom, EF and ED are opposite rays, and D, E and F are colinear. Since E is in between D and F , AB ∼ = DE, BC ∼ = EF , the third ∼ ∼ congruence axiom implies that AC = DF . Then SAS gives 4OAC = 4P DF , which implies that ∠AOC ∼ = ∠DP F . Notice the difference between the statement of Euclid’s postulate (5) and the statement below. 6 Theorem 3.21 (Alternate interior angle). Let `1 and `2 be two distinct lines, and another line ` intersects with `1 and `2 at distinct points. Suppose a pair of alternate interior angles are congruent, then the lines `1 and `2 are parallel. Proof: `2 E ` B C `1 D Prove by contradiction. In the above diagram, suppose ∠CBE ∼ = ∠DCB and that the lines `1 and `2 intersect at D. Then D is on a side of `. Let E be a point on the opposite side of ` to D such that EB ∼ = BD. Then SAS implies that 4DCE ∼ = 4EBC. It follows that ∠DBC ∼ = ∠ECB. Because ∠EBC and ∠DBC are supplements, the angles ∠DCB and ∠ECB are supplements as well. Thus E, C and B are colinear on `1 . It follows that there are two distinct lines `1 and `2 incident to the same two distinct points D and E, contradiction to the first incident axiom. Thus `1 and `2 are parallel. The following congruence criteria are similar and both of them can be shown with reductio ad absurdum, SAS and Theorem 3.21. The proof for ASA is different from what is in the book, and I think ours is better. Example 3.22 (AAS). If a side, the opposite angle and a neighbouring angle of one triangle are congruent respectively to a side, the opposite angle and a neighbouring angle of another triangle, then the two triangles are congruent. Example 3.23 (ASA). If a side and both of its neighbourhing angles of one triangle are congruent respectively to a side and both of its neighbourhing angles of another triangle, then the two triangles are congruent. Another congruence criterion is SSS. Its proof more complicated and we will come back to it later. Example 3.24 (SSS). If the three sides of one triangle are congruent respectively to the three sides of another triangle, then the two triangles are congruent. Notice that all of these proofs only use the axioms that we introduced previously. They do not depend on the tricky fifth postulate. Example 3.25. How many other combinations of S and A’s would give rise to congruent triangles? The following proposition has a constructive proof, i.e. is proven by construction. Proposition 3.26. Midpoint exists and is unique for any segment. Proof: C C O B B A O A D D Figure a) Figure b) 7 Let AB be a segment. Let C be a point not incident to line AB. Let D be a point on the opposite side of line AB from C, such that ∠BAC ∼ = ∠ABD and AC ∼ = BD. By Theorem 3.21, the lines AC and BD are parallel. Let O be the intersection point of line AB and CD, then O 6= A and O 6= B. Suppose that O is not in between A and B, say, A is in between O and B as in Figure b) (the other case will be similar). Then for 4ODB, the line CA intersects with OB at A, then it must intersect with either OD or DB. Neither is possible, contradiction. Thus, O is in between of A and B. It follows that ∠AOC ∼ = ∠BOD, and AAS implies that 4AOC ∼ = 4BOD. Then AO ∼ = OB and O is a midpoint of AB. Suppose that there are at least two midpoints of AB. Let O0 be another midpoint of AB, and without loss of generality, suppose that O0 is in between A and O, then O is in between O0 and D. By the definition of midpoints and order of segments, AO0 < AO ∼ = OD < O0 D ∼ = AO0 , which is absurd. Thus midpoint is unique. Remark 3.27. Write out which axioms / definitions are used for each sentence. Compare the proof of unique-ness with the proof of Euclid’s postulate (4) (Corollary 3.18). 3.2.5. Axiom of parallelism. This replaces Euclid’s postulate (5). In the list of Hilbert, the next set of continuity axioms comes before this one. On the other hand, since the detailed discussion of the continuity axioms will for sure exceeds the scope of this course, we are only going to list them for completeness. Thus, we have the axiom of parallelism here. (1) For every line ` and every point P not incident to `, there is a unique line incident to P that is parallel to `. Remark 3.28. This axiom is the most controversial among Euclid’s postulates. In fact, a weaker form suffices already, where the a unique is replaced by at most one. Then using other axioms, the form above follows. It was a major development in geometry when the axiom of parallelism is shown to be independent of the rest of the axioms. The two possible negations of the axiom both lead to consistent geometries (with appropriate adjustment of the other axioms): in projective geometry, no parallel line exists; in hyperbolic geometry, more than one (thus infinitely many) parallel lines exist. A lot of geometry results may be proven without the use of this axiom. The body of such results are often referred to as neutral geometry, sometimes also called absolute geometry. We are not going to specifically deal with such geometry, while we do try to prove things using as few axioms as possible. Example 3.29. If the axiom of parallelism were used, the proof of Proposition 3.26 can be simplified. Write the simplified proof. The proof of the following statement needs to use the axiom of parallelism. Example 3.30. Let `1 and `2 be parallel lines. If line ` intersects `1 then it also intersects `2 . It follows that the converse of Theorem 3.21 is true only with the axiom of parallelism. Example 3.31. Proof the converse of Theorem 3.21. (Prove by contradiction) Corollary 3.32. Two distinct lines that are perpendicular to the same line are parallel. From a point, there is a unique line perpendicular to a given line. The distance from a point to a line can be defined. These two statements provide a method of constructing parallel lines. 3.2.6. Continuity axioms. The first is called Archimedean axiom and the second is called line completeness axiom. They are really properties of the underlying set of numbers that we use. They provide the foundation to build the cartesian coordinate system and all the computer graphics. It’s possible to do geometry with a different set of axioms replacing these ones – they will be non-Archimedean or non-complete. 8 (1) For any segments AB and CD. There exists a positive integer n, such that starting from A, −→ putting down n segments congruent to CD consequetively on AB, the point B will lie in between A and the end point of the last segment. (2) The set of all points on any line is the maximal set of points incident to the line, for which all the previous axioms (concerning lines and points) apply. The following intuitive results need the continuity axioms. We will omit the proof. Example 3.33. If a line ` is incident to a point inside a circle γ as well as a point outside γ, then ` intersects with γ at exactly two points. Example 3.34. If a circle γ 0 is incident to a point inside a circle γ as well as a point outside γ, then γ 0 intersects with γ at exactly two points. Example 3.35. In the above examples, the new term circle is used but not defined. Define circle. How do you define a point being inside or outside of a given circle, with your definition of a circle? 3.3. Construction. The obvious model for Hilbert’s axiom system is the intuitive geometry, that we can draw with pens and geometry sets. In Euclidean geometry, construciton usually means construction by straightedge and compass. In a sense it relates the axioms to the physical world. Example 3.36. Describe the constructions realizing the incidence and congruence axioms. • A line incident to two distinct points • A segment on a ray congruent to a given segment • A angle on a given side of a ray congruent to a given angle The last two of which implicitly use the continuity axioms. Example 3.37. From a point P outside a line `, construct a line incident to P and perpendicular to `. Then construct a line incident to P and parallel to `. Remark 3.38. The construction described above uses the intersection results for circles and lines. The first construction needs a proof that implies the existence of right angles. Again, defining right angle in Definition 3.15 does not imply such a thing exists. Compare with Remark 3.11. The proof associated to the above construction is the following lemma Lemma 3.39. In an isoceles triangle 4ABC with AB ∼ = AC, let M be the midpoint of BC, then ∠AM B is a right angle. Proof: By pons assinum, ∠B ∼ = ∠C. Since M is the midpoint, BM ∼ = CM . Then SAS implies ∼ 4ABM ∼ 4ACM . It follows that ∠AM B ∠AM C. Since the last two angles are supplementary = = angles, they are right angles. There are objects that can’t be constructed by straightedge and compass. A famous example is Example 3.40 (Angle trisector). For an arbitrary angle ∠A, use only straightedge and compass, one can not construct another angle ∠B such that ∠A ∼ = 3∠B. If we allow other tools, then such construction will become possible. We will discuss constructibility in more details. 4. Angles and areas This is a curious juxtaposation of topics. On the other hand, in spherical and hyperbolic geometries, the area of a triangle is related to the sum of interior angles in a very simple way. In this sense, it is very peculiar for Euclidean geometry that they do not seem to relate to one another. 9 4.1. Angles in a triangle. −−→ Definition 4.1. A point P is interior to ∠AOB iff P and A is on the same side of OB, and P and −−→ B is on the same side of OA. A OD emanating from O is interior to ∠AOB iff all points incident to −−→ OD is in the interior of ∠AOB. There exists at least one point interior to an angle. −→ Example 4.2. In ∠AOB, let C be a point between A and B, then C is interior to ∠AOB, and OC is −→ −→ interior to ∠AOB. Conversely, if OC is interior to ∠AOB, then OC intersects AB. The second part is also referred to as the Crossbar Theorem. Proof of Crossbar Theorem: Prove by contradiction. −→ −→ Assume that OC is in interior to ∠AOB and OC does not intersect AB. Let A0 be a point on the opposite ray of OA. Then in 4A0 AB, the line OC intersects side A0 A at O, by Pasch’s theorem, the line OC must also intersect one of the segments AB and A0 B. By the assumption, it follows that the line OC intersects A0 B and let the intersection be D. A O C A0 B Then D and B are on the same side of line OA, D and A0 are on the same side of line OB. It follows that D and C are on opposite sides of line OB, which implies that D is on the ray opposite to OC. This further implies that C and D are on opposite sides of line OA. Finally, we derive that C and B −→ are on opposite sides of line OA, which is a contradiction. Thus, OC does intersect AB. −→ Proposition 4.3. In ∠AOB, let C be a point interior to ∠AOB and D on OC such that C is in −−→ between O and D. Then D is interior to ∠ABE, where E is a point on OB such that B is in between O and E. Proof: Because DO intersects the line AB at C, and EO intersects the line AB at B, D and E are both on the A opposite side of AB from O. It follows that D and E are on the same side of AB. The line CD intersects the line D OB at O it follows that CD does not intersect the line C OB (shown by reductio ad absurdum). Thus, C and D are on the same side of BE, which is the same side that O B E A is on. Definition 4.4. In 4ABC, the angles formed by the sides are interior angles. The supplements of the interior angles are exterior angles. Without using the parallelism axiom, one can prove the following. Theorem 4.5 (Exterior angle theorem). An exterior angle is larger than either remote interior angles. B E D C Proof: Let D be the midpoint of AB, let E be the −−→ point on CD such that CD ∼ = DE. Then E is interior to ∠BAF . By SAS, 4ADE ∼ = 4BDC. Thus, ∠ABC ∼ = ∠DAE < ∠BAF since E is interior to ∠BAF . Similarly, using a midpoint on AC it can be shown that ∠ACB < ∠BAF . A F With the parallelism axiom, the following stronger results can be shown. 10 Example 4.6. The sum of the interior angles of any triangle is a flat angle. C A B 4.2. Parallelogram. Definition 4.7. Let A, B, C and D be four points, no three of which are colinear and any pair of the segments AB, BC, CD and DA either have no intersection or have only an endpoint in common. A quadrilateral ABCD consists of the four such segments, which are called the sides and the four points are called vertices. The quadrilateral ABCD is convex if each vertex is interior to its opposite angle, e.g. A is interior to ∠BCD, etc. Example 4.8. Is there a minimal condition for convexity, i.e. the interior condition for a smaller number of vertices and their opposite angles than all 4 of them? Example 4.9. The diagonals of a convex quadrilateral must intersect. This follows from the Crossbar Theorem. Definition 4.10. A parallelogram is a quadrilateral with two pairs of parallel opposite sides. Example 4.11. There exists a parallelogram. Parallelograms are convex. The last statement does not need parallelism axiom while the next one does. Proposition 4.12. In a parallelogram, opposite sides are congruent and the diagonals bisect each other; opposite angles are congruent and adjacent angles are supplementary. A D O B Proof: Using the converse of the alternate interior angle theorem and ASA congruence criterion, 4ABC ∼ = ∼ 4CDA, it follows that ∠B ∼ ∠D, AD CB and = = AB ∼ = DC. Similarly, ∠A ∼ = ∠C. In 4ABO and 4CDO, the converse of the alternate interior angle theC orem and ASA implies 4ABO ∼ = 4CDO. It follows AO ∼ = CO and BO ∼ = DO. Since the sum of interior angles of triangle is a flat angle, ∼ ∠B + ∠A = ∠B + ∠BAC + ∠ACB is a flat angle. Thus ∠A and ∠B are supplementary. The proof of the diagonals bisect each other can be used in the proof of the midpoint exists. Proposition 4.13. A quadrilateral is a parallelogram if one of the following holds • the diagonals bisect each other • one of the opposite sides are parallel and congruent to each other Definition 4.14. A rectangle is a paralellogram, one of whose interior angle is a right angle. A rhombus is a parallelogram, a pair of adjacent sides of which are congruent. A square is both a rectangle and a rhombus. Example 4.15. All interior angles of a rectangle are right angles, and all sides of a rhombus are congruent. Show by construction that there exists a rectangle, a rhombus and a square. 11 The existence of rectangle implies that the distance between parallel lines is well-defined. Example 4.16. The diagonals of a rhombus are perpendicular bisectors of each other, and are angle bisectors of their respective interior angles. This gives a simpler construction of perpendicular bisectors of segments and angle bisectors. Compare to Example 3.37. 4.3. Area and length. The way area is introduced is very non-constructive. On the other hand, it follows the same pattern as all the definitions above: define a concept by necessary properties and then prove that such concept makes sense. Example 4.17. A polygon is defined similarly as a quadrilateral. Write the definition. We will be less precise and provide less detail in this part, instead, to save time, we will resort to intuitive terminology. Definition 4.18. Area a function on the set of all polygons satisfying the following: • |P | is a non-negative real number • P ∼ = P 0 ⇒ |P | = |P 0 | • if P is subdivided into two polygons P1 and P2 , then |P | = |P1 | + |P2 | Remark 4.19. This is a special case of a more general concept called measure, which is very important for properly defining integration. Note that area here are only defined for polygons. For arbitrary shape, the last properties needs to be replaced by additivity of infinite subdivision, and involves taking limit and such. In this course, we keep it simple and whenever possible, restrict to polygons. It can be shown that area exists (and up to a scalar multiple, it is unique). This is beyond the scope of our course, and lands in the realm of real analysis / measure theory. Together with the axioms, one can use area to define length of segments as following. Let P = ABCD be a square with area |P | = 1 and define the length |AB| of AB to be 1. Then the continuity axioms furnishes a length function for any segment on the line AB. The congruence axioms furnishes a length function for any segment, by requiring congruent segments have the same lengths. Note that this only defines length for segments, as a linear measure. The length of arbitray curve will have to be defined using analysis, representing curves as limits of broken segments. Remark 4.20. The above discussion used a lot of things that we won’t be able to cover in this course. From now on, we fix a length unit and area unit (the unit square as above). Then the following can be shown with the help again from the continuity axiom. We are not going to give a proof of it. Proposition 4.21. The area of a rectangle equals to the product of the lengths of its adjacent sides. Prove this statement for rectangles with rational side lengths. This leads to all the familiar area formulae for parallelograms and triangles, using cut and paste. Example 4.22. Write down and prove the area formulae for parallelograms and triangles. In the above formula, the notion of altitude is needed. A definition is given below Definition 4.23. In 4ABC, the altitude from C is the line incident to C and perpendicular to AB. Let the intersection be X, the height over the side AB is the length |CX|, and |AB| is the base. Corollary 4.24. Let A, B, C and D be four points on line ` and E be a point not on `. Then |4ABE| |AB| = |4CDE| |CD| Proof: They have the same height. The result follows from the area formula. The next theorem has many proofs, while we will give a proof using area. 12 Theorem 4.25 (Pythagorean theorem). For a right triangle 4ABC with right angle ∠C, |AB|2 = |AC|2 + |BC|2 . D C3 C2 B E C A Proof: Construct C1 on line CA such that AC1 ≡ BC and A is in between C and C1 . Construct C3 on line CB such that BC3 ≡ AC and B is in between C and C3 . Construct perpendicular lines of BC at C3 and of AC at C1 , then they intersect at C2 . The quadrilateral CC1 C2 C3 is a square. Construct D in the segment C2 C3 and E in the segment C1 C2 such that C2 D ≡ C1 E ≡ AC. Then C2 E ≡ C3 D ≡ BC. C1 By SAS, the shaded right triangles are all congruent. Furthermore, the angle ∠BAE is the complementary angle of a right angle, and is itself a right angle. It follows that ABDE is a square as well. Writing down the areas, we get 1 |AB|2 = (|AC| + |BC|)2 − 4 × |AC| × |BC| = |AC|2 + |BC|2 2 5. Triangles 5.1. SSS and triangle inequality. We prove the SSS criterion for triangles. Theorem 5.1 (SSS). If the three sides of one triangle are congruent respectively to the three sides of another triangle, then the two triangles are congruent. C0 C A B A0 C B0 C C 00 C 00 A B A B Proof: Prove by contradiction. Assume that the two triangles are not congruent, then without lose of generality, suppose that ∠A > ∠A0 . There is a point C 00 interior to ∠A such that AC 00 ∼ = A0 C 0 and ∠C 00 AB ∼ = ∠A0 ⇒ 4ABC 00 ∼ = 4A0 B 0 C 0 by SAS 13 There are three cases for C 00 : on the line BC (which implies that C 00 = C since BC 00 ∼ = BC, and it 0 00 00 follows that ∠A = ∠A , contradiction); C and A are on different sides of BC; or C and A are on the same side of BC. The last two cases are illustrated above. Suppose that C 00 and A are on different sides of BC. The Crossbar theorem implies that the quadrilateral ABC 00 C is convex. Since 4ACC 00 and 4BCC 00 are both isosceles triangles, ∠ACC 00 ∼ = ∠AC 00 C < ∠BC 00 C ∼ = ∠BCC 00 < ∠ACC 00 . This is contradiction. The other case can be shown with the help of the Exterior Angle Theorem. Thus ∠A ∼ = ∠A0 and by SAS, 4ABC ∼ = 4A0 B 0 C 0 . Recall that SSS provides the proof of the construction of congruent angles. Proposition 5.2. A point P is incident to the perpendicular bisector of AB iff CA ∼ = CB. Using Pythagorean theorem, we have Proposition 5.3. A point P is incident to the angle bisector of ∠AOB iff the distance from P to the two sides of ∠AOB are the same. Remark 5.4. The perpendicular bisector and angle bisector are unique and the two propositions above show that they exist. The uniqueness basically follows from the congruence axiom of angles. For example, by definition a perpendicular bisector passes through the unique midpoint, and is perpendicular to the line AB. The second fact implies that the angles formed are right angles, while right angles are all congruent, and uniqueness follows from the congruence axioms. Proposition 5.5. In a triangle 4ABC, ∠C < ∠B ⇐⇒ AB < AC. C D A B Proof: “AB < AC ⇒ ∠C < ∠B”: Since AB < AC, there exists a point D on AC such that AD ∼ = AB. It ∼ follows that in 4ABD, ∠ABD = ∠ADB. For 4BDC, ∠ADB is an exterior angle, and ∠ADB > ∠C. As D is interior to the angle ∠B, we have ∠ABD < ∠B. Thus ∠C < ∠ADB ∼ = ∠ABD < ∠B. “∠C < ∠B ⇒ AB < AC”: We prove it by contradiction. Suppose ∠C < ∠B and AB > AC. If AB ∼ = AC, then ∠B ∼ = ∠C, leads to contradiction. If AB > AC, by the last step, it follows ∠C > ∠B, which again leads to contradiction. Corollary 5.6 (Triangular inequality). In 4ABC, |AB| + |BC| > |AC|. D −→ Proof: On the ray AB, let D be the point such that A ∗ B ∗ D and BD ∼ = BC. It then follows that ∠D ∼ = ∠BCD < ∠ACD. Prop 5.5 implies AC < AD. Thus, |AC| < |AD| = |AB| + |BD| = |AB| + |BC|. B A C 5.2. Proportion and similarity. Definition 5.7. Two triangles are similar iff they have three pairs of congruent interior angles and the lengths of the respective sides have the same ratio. The notation for similarity is ∼. Remark 5.8. The similarity concept can be extended to arbitrary point and segment configuration, in particular, it’s reasonable and intuitive to define similarity for polygons. Give a definition. 14 The fundamental result for the similarity of triangles is the following AA criterion of similarity. Note that the proof uses the parallelism axiom. Theorem 5.9 (AA). Two triangles are similar if they have two pairs of congruent interior angles. Proof: The proof uses the following lemma concerning parallel lines in a triangle. Suppose that 4ABC and 4DEF satisfy ∠A ∼ = ∠D and ∠B ∼ = ∠E. If DE ∼ = AB, it implies that 4ABC ∼ = 4DEF , 0 0 which implies similarity. Thus, suppose that DE < AB. Let E and F be points on segment AB and −→ ray AC respectively such that AE 0 ∼ = ∠B, = 4DEF ⇒ ∠E 0 ∼ = DE and AF 0 ∼ = DF . Then 4AE 0 F 0 ∼ 0 0 and it follows that E F k BC. The lemma below then implies |DE| |AE 0 | |AF 0 | |DF | = = = |AB| |AB| |AC| |AC| Switch the role of A and B as well as D and E, we obtain using the same argument |DE| |EF | = |AB| |BC| The parallelism axiom implies that the sum of interior angles of a triangle is a flat angle, which shows that ∠C ∼ = ∠F . It follows that 4ABC ∼ 4DEF Lemma 5.10. In 4ABC, let D and E be points on the sides AB and AC respectively. Then DE k |AD| |AE| BC ⇐⇒ = |AB| |AC| Proof: A D B H E K C Let H and K be points on BC such that DH and EK are perpendicular to BC. Then 1 |BD| 1 |CE| |4ABC| and |4BEC| = |BC| · |EK| = |4ABC| |4BDC| = |BC| · |DH| = 2 |AB| 2 |AC| It follows, using Proposition 4.13, that |BD| |CE| |AD| |AE| = ⇐⇒ = BC k DE ⇐⇒ DH ∼ = EK ⇐⇒ |AB| |AC| |AB| |AC| . Theorem 5.11 (SAS for similarity). Two triangles are similar if they have a pair of congruent interior angles and the lengths of the neighbouring sides have the same ratio. |AB| |AC| Proof: Suppose that 4ABC and 4DEF satisfy ∠A ∼ = . Suppose the ratio = ∠D and |DE| |DF | −→ is not 1, otherwise, the triangles are congruent, and are of course similar. Construct on AB a point −→ E 0 such that AE 0 ∼ = DE and on AC a point F 0 such that AF 0 ∼ = DF . By SAS for congruence, 4AE 0 F 0 ∼ = 4DEF . On the other hand by Lemma 5.10, E 0 F 0 k BC. It follows that ∠B ∼ = ∠E 0 ∼ = ∠E 0 ∼ and ∠C ∼ ∠F ∠F . By AA criterion, 4ABC ∼ 4DEF . = = 15 Corollary 5.12. For 4ABC, let D and E be distinct points on the lines ( not segments) AB and AC |AD| |AE| respectively. Then DE k BC ⇐⇒ 4ABC ∼ 4ADE ⇐⇒ = . |AB| |AC| This provides a method to construct arbitrary rational fraction of any segment. Corollary 5.13. Let 4ABC be a right triangle with the right angle at A. Let D be the intersection of the altitude from A with BC, then |AD|2 = |BD| × |DC|. In fact, 4ABD ∼ 4CAD ∼ 4CBA, and other equalities can be obtained from these similarities. Remark 5.14. The similarity of right triangles gives the definition of trignometry functions. From now on, we will use trignometric functions freely since they are now defined. Example 5.15. Let `1 and `2 be two lines, A, B, C points on `1 A and A0 , B 0 , C 0 points on `2 such that B is the midpoints of AC. 0 0 0 Suppose that AC does not intersect `2 and AA k BB k CC , then |AA0 | + |CC 0 | = 2|BB 0 | B Proof: First, suppose that AA0 ∼ = CC 0 , then ACC 0 A0 is a parallelogram and `1 k `2 . It follows that ABB 0 A0 is also a C parallelogram, and BB 0 ∼ = AA0 and the statement holds. A0 D B0 E C0 `3 Next, suppose that AA0 ∼ 6= CC 0 , say AA0 < CC 0 . Let `3 be the line through A parallel to `2 , and let D and E be its intersection with DD0 and EE 0 respectively. Then AEC 0 A0 is a parallelgram and C ∗ E ∗ C 0 . In 4ACE, BD k CE and 2|AB| = |CE|. It follows that 2|BD| = |CE|. Thus it follows |CC 0 | + |AA0 | = 2|BB 0 |. Q D Example 5.16. Let ABCD be a convex quadrilateral, and P, Q, R and S are respectively the midpoints of AB, CD, AD and BC. Then P Q and RS bisect each other. S R O A Example 5.17. Let ABCD be a convex quadrilateral, and P1 , P2 the trisection points of AB and Q1 , Q2 be the trisection |P1 P2 Q1 Q2 | 1 points of CD as shown below. Show that = |ABCD| 3 Proof: Drop perpendicular lines from Q1 , Q2 and C to AB, with intersection points H1 , H2 and H respectively. Then Q1 H1 k Q2 H2 k CH, and |4Q1 AP1 | + |4CP2 B| |Q1 H1 | + |CH| = =2 A |4Q2 P1 P2 | |Q2 H2 | 1 D|+|4BQ2 C| = 2. These add up to give Similar argument shows that |4AQ|4P 1 Q1 Q2 | the result follows. 16 C B P D Q1 Q2 C PH 1 1 HP 22 H B |ADQ1 P1 |+|BCQ2 P2 | |P1 Q1 Q2 P2 | = 2 and Alternative proof: In 4ADC and 4ABC |4ADQ1 | |DQ1 | 1 |4P2 BC| |P2 B| 1 = = and = = |4ADC| |DC| 3 |ABC| |AB| 3 It follows that 1 |4ADQ1 | + |4P2 BC| = |ABCD| 3 Now |4AP1 Q1 | = |4P1 P2 Q1 | and |4Q1 Q2 P2 | = |4Q2 CP2 |. It follows that Q1 C Q2 D A P1 P2 B |ABCD| = (|4ADQ1 | + |4P2 BC|) + (|4AP1 Q1 | + |4Q2 CP2 |) + |P1 P2 Q2 Q1 | 1 = |ABCD| + (|4P1 P2 Q1 | + |4Q1 Q2 P2 |) + |P1 P2 Q2 Q1 | 3 1 = |ABCD| + 2|P1 P2 Q2 Q1 | 3 It then follows that |P1 P2 Q2 Q1 | = 31 |ABCD| D Q 1 Example 5.18. Continue with the last example and let R1 , R2 be the trisection points of AD and S1 , S2 be the trisection 1 |KLM N | = points of BC as shown below. Show that |ABCD| 9 R2 N Q2 C M S2 R1 K L S1 A P1 P2 B Proof: The proof uses the result of Example 5.17. The key is to show the points K, L, M and N are also trisection points, which uses the idea of Example 5.16. 5.3. Ceva and Menelaus. We discuss Ceva’s and Menelaus’ theorems in this section. Both are classical and important. The importance of Ceva’s theorem will be apparent soon. In the statement −→ and proof of these theorems, we use directed lengths |AB| for segments on the same line. Suppose that −→ −→ A, B, C, D are four points on `. Fix a direction on the line AC, |AC| is positive if the ray AC is in the −→ |AC| same direction. On the other hand, the ratio −−→ does not depend on the choice of positive direction. |BD| −−→ −→ |CB| |AB| For example, when A ∗ B ∗ C, −1 < −→ < 0 while −−→ > 0. |AC| |BC| Theorem 5.19 (Ceva’s theorem). For a triangle ABC in the plane, let X, Y and Z be points on the lines BC, CA and AB respectively and none of them coincide with the vertices. Then the lines AX, BY and CZ are concurrent (all three lines pass through the same point) iff −−→ −−→ −→ |BX| |CY | |AZ| −−→ −→ −→ = 1 |XC| |Y A| |ZB| Each ratio can be negative since it concerns two segments on the same line, see the right figure below. Proof: 17 C Y C Y X P P X A Z B A B Z “Concurrency ⇒ equality”: We will first assume that the points X, Y and Z lies on the respective |4BY C| |4P Y C| sides, i.e. the left figure above. Apply the Corollary 4.24 for and , we get |4BY A| |4P Y A| |4BY C| − |4P Y C| |CY | |4BP C| = = |4AP B| |4BY A| − |4P Y A| |Y A| Similarly, it can be shown |4AP B| |BX| |4CP A| |AZ| = and = |4CP A| |XC| |4BP C| |ZB| then the equality follows. The same argument can be adapted to work for the figure on the right. There is another case, and it would be good exercise to sketch the figure and adapt the proof to work for it. It remains to see that if the point of concurrency P is on the exterior of the triangle 4ABC, then exactly two of the three ratios are negative. This fact follows from the observation that such point P would lie on the exterior of two of the interior angles of 4ABC, while lie on the interior of the other one, or its vertical angle. Thus, the product remains positive, which is 1. “Equality ⇒ concurrency”: Suppose the equality holds for a configuration, i.e. −−→ −−→ −→ |BX| |CY | |AZ| −−→ −→ −→ = 1 |XC| |Y A| |ZB| Let P 0 be the intersection point (which exists due to the Crossbar Theorem) of AX and BY , Z 0 the intersection of the lines AB and CP 0 (need to show that the two lines are not parallel). By the last part −−→ −−→ −−→ −−→ −→ −→ −→ |BX| |CY | |AZ 0 | |AB| |AZ 0 | |AZ| |AB| −−→ −→ −−→ = 1 ⇒ −−0→ = −→ ⇒ −−0→ = −→ |XC| |Y A| |Z 0 B| |ZB| |ZB| |Z B| |Z B| It follows that ZB = Z 0 B ⇒ Z = Z 0 , i.e. the lines are concurrent. Theorem 5.20 (Menelaus’ theorem). For 4ABC in the plane, let X, Y and Z be points on the lines BC, CA and AB respectively, and none of them coincide with the vertices. The points are colinear iff −−→ −−→ −→ |BX| |CY | |AZ| −−→ −→ −→ = −1 |XC| |Y A| |ZB| Proof: 18 A A H2 Z B Y X H1 C C Z H2 H1 H3 H3 Y X B “Conlinearity ⇒ equality”: The proof is using similar triangles obtained from dropping perpendiculars to the line XY Z. The ratios of the line segments are identified with the ratios of the distances. “Equality ⇒ colinearity”: The proof is by contradiction, similar to Ceva’s theorem. 5.4. Centers of a triangle. Definition 5.21. In a triangle 4ABC, a median is a segment connecting a vetex and the midpoint of the oppositing side, e.g. A and the midpoint of BC. The following is one of many important facts that can be shown as corollaries of Ceva’s theorem. Corollary 5.22. The three medians of a triangle are concurrent. The point of common intersection is called the centroid. Proof: In this case, each ratio in the product is 1. The centroid sometimes is also called the center of mass. Lemma 5.23. The three medians of a triangle subdivides the triangle into 6 triangles of equal area. From this lemma, it’s easy to see Corollary 5.24. The centroid divides each median into two parts. The ratio of the length from the vertex against the length from the opposite middle point is 2 Using similar triangles and Ceva’s theorem, the following can be shown. Corollary 5.25. In 4ABC, the altitudes from A, B and C are concurrent. The point of concurrency is the orthocenter. The following are corollaries of Propositions 5.2 and 5.3. Corollary 5.26. In 4ABC, the perpendicular bisectors of AB, BC and CA are concurrent. The point of concurrency is the circumcenter. Corollary 5.27. In 4ABC, let E be a point on BC such that AE bisects ∠A, then |AB| |BE| = . |AC| |EC| The corollary above can be shown using areas. There are now two ways of showing the next corollary. Corollary 5.28. In 4ABC, the angle bisectors of ∠A, ∠B and ∠C are concurrent. The point of concurrencey is the incenter. Example 5.29. In 4ABC, among its centroid, circumcenter, incenter and orthocenter, any two coincide ⇐⇒ 4ABC is equilateral, in which case, all of them coincide. Corollary 5.30. The angle bisectors of two external angles and the remote interior angle of a triangle are concurrent. The point of concurrency is an excenter. There are three excenters of a triangle. 19 A Definition 5.31. In a given triangle, its median triangle is formed by the three middle points of its three sides. Proposition 5.32. The median triangle is similar to the original triangle. The circumcenter of the original triangle coincides with the orthocenter of the median triangle. F B O E D C It’s very intuitive that for congruent triangles, the segments between the corresponding special points should be congruent; or for similar triangles, the corresponding segments should have the same ratio as the ratio of the sides. On the other hand, these are facts that require proof. Example 5.33. 4ABC ∼ = 4A0 B 0 C 0 , and H, H 0 are the respective althocenters, then AH ∼ = A0 H 0 . Proof: Let AX and A0 X 0 be the respective altitudes of the triangles, where X and X 0 are the feet. In the right triangles 4BAX and 4B 0 A0 X 0 , ∠B ∼ = ∠B 0 and AB ∼ = A0 B 0 . It follows from ASA that 4BAX ∼ = 4B 0 A0 X 0 and ∠BAH ∼ = ∠B 0 A0 H 0 . Similarly ∠ABH ∼ = ∠A0 B 0 H 0 . By ASA again, 0 0 0 0 0 ∼ ∼ 4BAH = 4B A H . Thus AH = A H . Example 5.34. 4ABC ∼ 4A0 B 0 C 0 , and O, O0 are the respective circumcenters, then |OA| |AB| = 0 0 . 0 0 |A B | |O A | It’s impressive that various lines in a triangle are concurrent. In this sense, it’s much more impressive that some of the centers are even colinear. Theorem 5.35 (Euler line). In 4ABC, let O, G and H be respectively the circumcenter, centroid, and orthocenter. Then O ∗ G ∗ H and |GH| = 2|OG|. Proof: For equilateral 4ABC, all the centers mentioned coincide, and the statement holds. −→ Suppose that 4ABC is not equilateral. On the ray OG, let H 0 be the point such that O ∗ G ∗ H 0 and |GH 0 | = A 2|OG|, we show that AH 0 is an altitude. Then similar arguments will show that BH 0 and CH 0 are altitudes as well, i.e. H 0 = H is the orthocenter. Let D be the midpoint of BC, then OD is perpendicuH0 G lar to BC and A ∗ G ∗ D, with |GA| = 2|DG|. Since O |GH 0 | |CG| = , it follows that 4H 0 GA ∼ 4OGD. By |DG| B C |GA| D the Alternate Interior Angle Theorem, OD k AH 0 , which implies that AH 0 is an altitude. This in fact gives another proof of the concurrency of the altitudes of a triangle. 6. Circles 6.1. Arcs and angles. A circle is centered at O, and we call it circle O. Definition 6.1. Let A and B be two points on the circle O, then AB is a cord. Let M be a point not on AB, the points of circle O lying on the same side of AB as M is an arc of the cord AB. There are two arcs of any cord, and they are said to be supplementary arcs extended by the cord. The center angle of the cord AB is ∠AOB. Let C be a point on an arc of the cord AB, then ∠ACB is an inscribed ¯ be the arc on the opposite side of AB from C, then the angle ∠ACB is angle of the cord AB. Let AB 20 ¯ If O does not lie on the same side of AB as AB, ¯ the center angle ∠AOB said to be opposite to AB. ¯ and the arc AB ¯ is short. is opposite to AB, ¯ be the short arc opposite to the center angle ∠AOB. Then all points on AB ¯ Proposition 6.2. Let AB −−→ ¯ is interior to ∠AOB, and any ray OD interior to ∠AOB intersects with AB. Proof: The second part follows from Crossbar theorem and congruence axioms. ¯ which is not interior Prove the first part by contradiction. Suppose that there is a point P on AB to ∠AOB. Then since P is on the opposite side of AB as O, OP intersects AB at E, thus O ∗ E ∗ P , and E is not on AB. Suppose that E ∗ A ∗ B. By Exterior Angle Theorem for 4AOB and 4AOE, ∠EAO > ∠EBO ∼ = ∠BAO > ∠AEO. Thus, OE > OA, and OP > OE by construction. It follows that OP > OA, which contradicts that P is on the circle O. The line through the center of a circle and perpendicular to a cord bisects it, and its center angle. Lemma 6.3. The center angle opposite to a short arc is twice an inscribed angle opposite to the same arc. Thus, incribed angles opposite to the same short arc are congruent. D B D A B A O O C C Proof: There are two cases, distinguished by if the other end of the diameter through the vertex of ¯ We show one of the cases, in which it lies on AB. ¯ For 4ACO, the the inscribed angle lies on AB. ∼ angle ∠AOD is an external angle and ∠AOD = ∠OAC + ∠OCA. Since 4ACO is an isosceles triangle, ∠OAC ∼ = ∠OCA, ∠AOD ∼ = 2∠OCA. Similarly, ∠BOD ∼ = 2∠BCO. Then ∠AOB ∼ = ∠AOD + ∼ ∼ ∠BOD = 2∠ACO + 2∠BCO = 2∠ACB. Corollary 6.4. Inscribed angle of the diameter is the right angle. For a right triangle, the hypoteneous is a diameter of its circumcircle. Corollary 6.5. No cord is longer than a diameter. Example 6.6 (Stereographic projection). Let AB be a diameter of the circle O and C a point on the circle different from A and B. Let ` be the line through O perpendicular to AB. Let E and F be the intersections of AC and BC with `, then |OE| × |OF | = |OA|2 . ¯ be a short arc and ∠ACB an opposing inscribed angle, then all points on AB ¯ Corollary 6.7. Let AB are interior to ∠ACB. ¯ is interior to ∠AOB. Proof: By contradiction, using the congruence axiom for angles and that AB Corollary 6.8. If C and D are respectively points on the supplementary arcs extended by the cord AB, then CD intersects AB. Note: we only know that CD intersects line AB to start with Definition 6.9. A polygon P is inscribed in a circle if all its vertices are on the circle. In this case, the circle is the circumscribed to the polygon P , and we say the polygon is cyclic. Any triangle is inscribed in a circle and the circumcenter is the center of the circumscribed circle. Proposition 6.10. Cyclic quadrilateral is convex. 21 ¯ since CD Proof: Let ABCD be an inscribed quadrilateral. C and D must be on the same arc AB does not intersect with AB. It follows that CD is on the same side of line AB. Similarly, BC is on the same side of line AD. It follows that C is interior to ∠DAB. Similarly D is interior to ∠ABC. Corollary 6.11. Inscribed angles opposite to supplementary arcs are supplementary angles. Proof: C B C D A O O D A B There are two cases. If the cord AB is a diameter, the inscribed angles on both sides ∠ACB and ∠ADB are both right angles, which are supplementary. If the cord AB is not a diameter, let C be a point on the circle such that BC is a diameter. Then ¯ and ∠CAB is a right angle. Let D be a point ∠ACB is an inscribed angle opposite to the short arc AB ¯ ¯ Since ∠ADC and ∠ABC both are on AB, then ∠ADB is opposite to the supplementary arc of AB. ¯ (Why?), ∠ADC ∼ opposite to the same short arc AC = ∠ABC. The statement follows from the sum of interior angles of a triangle is the flat angle. Corollary 6.12. A parallelogram is a cyclic quadrilateral iff it is a rectangle. Corollary 6.13. Inscribed angles opposite to the same arc are congruent. Corollary 6.14. Let AB be a cord, which is not a diameter. Then the inscribed angle opposing to the ¯ is smaller than right angle ( acute), and the inscribed angle opposing to the supplementary short arc AB long arc is larger than right angle ( obtuse). Proposition 6.15 (Law of Sines). In 4ABC, let a = |BC|, b = |CA| and c = |AB|, then b c a = = sin ∠A sin ∠B sin ∠C If R is the radius of the circumcircle of 4ABC, then the common ratio is 2R. From the Law of Sines, we can derive the following criteria for 4 points to lie on the same circle, or equivalently, for a quardrilateral to be cyclic. Corollary 6.16. Suppose that ABCD is a convex quadrilateral. The following are equivalent and are both equivalent to ABCD being cyclic: • ∠ACB ∼ = ∠ADB • ∠ABC is supplementary to ∠ADC Proof: We only have to show that any one of the above implies that ABCD is cyclic. For both cases, the special case of one (thus both) of the angles is a right angle is straightforward. We suppose that none of the angles are right angle in the following. For the first case, the points C and D are on the same side of AB. Let circles O and O0 be the circumcircles of 4ACB and 4ADB respectively. By the Law of Sines, circles O and O0 have the same radii. Let D be the midpoint of AB, then OD ⊥ AB and O0 D ⊥ AB. It follows that O, O0 and D are colinear. Pythagorean theorem implies that OD ∼ = O0 D. The only thing left to show is that O and O0 22 are on the same side of AB. Assume that they are on the opposite side of AB, then one of ∠ACB and ∠ADB are opposite to a short arc and one of them are opposite to a long arc, and thus are not equal, which is a contradiction. Thus, O and O0 are on the same side of AB, and they have to coincide. It follows that ABCD is cyclic. For the second case, the points B and D are on the opposite sides of AB. Again, let O and O0 be the circumcircles of 4ABC and 4ADC respectively. Since sin ∠ABC = sin ∠ADC by the properties of sin function, similar to the above, the only thing that we need to show is then O and O0 are on the opposite side of AB, which is again shown by contradiction. 6.2. Properties of circle. Definition 6.17. A line is tangent to a circle if they intersect at exactly one point, which is called the tangent point. A line is a secant line of a circle if they intersect at two points. Corollary 6.18. A line ` and a circle centered at O intersect at P . ` is tangent to circle O iff OP ⊥ `. Proof: “OP ⊥ ` ⇒”: Assume that ` intersects circle O at another point Q. Proof by contradiction. “` tangent to circle O ⇒”: Assume that ` 6⊥ OP , then drop perpendicular line from A, the other intersection of OP with the circle, to `, and find a right triangle. Theorem 6.19. Suppose P is a point not on the circle centered at O. Let `1 and `2 be two secant lines of the circle through P , intersecting respectively at A, B and C, D. Then |P A| · |P B| = |P C| · |P D|. Proof: We show the case when P is on the outside of the circle (or |OP | > radius). Suppose that the configuration B `1 is as in the above diagram. Then ∠P BD ∼ = ∠P CA by A ∼ Lemma 6.3. Together with ∠P = ∠P , it follows that P0 O P 4P CA ∼ 4P BD, Thus D |P A| |P C| = =⇒ |P A| · |P B| = |P C| · |P D| |P D| |P B| `2 C The other case is left as exercise. −→ −−→ −→ Remark 6.20. The equality above actually holds even with directed lengths, i.e. |P A| · |P B| = |P C| · −−→ |P D|. It can be seen from the fact that if P is not on the circle, A ∗ P ∗ B and C ∗ P ∗ D are either both true or both false. When P does lie on the circle, then the product on both sides are 0. Definition 6.21 (Power of point). The power of point D with respect to the circle O is p(D; O) := −−→ −−→ |DA| · |DB| for any secant line AB through D with intersection points A and B. Example 6.22. Let circle O be the circumcircle of an equilateral triangle 4ABC. Let D be a point on ¯ Then |AD| = |DB| + |DC|. the short arc BC. A D0 O B E D C Proof: On line DB, let D0 be the point such that D0 ∗ B ∗ D and D0 B ∼ = DC. Since ∠DCA and ∠ABD are supplementary, it follows that ∠ABD0 ∼ = ∠ACD. By SAS, we have 4ABD0 ∼ 4ACD. It fol= lows that ∠AD0 C ∼ = ∠ADC ∼ = ∠ABC and ∠ADB ∼ = ∠ACB. Furthermore ∠D0 AD = ∠D0 AB + ∠BAD ∼ = ∠CAD + ∠BAD = ∠BAC. Since 4ABC is equilateral, ∠AD0 D ∼ = ∠ADD0 ∼ = ∠DAD0 and 4AD0 D is equilateral as well. Thus |AD| = |D0 B| + |BD| = |CD| + |BD| Example 6.23. Continue from Example 6.22, show that 23 1 1 1 + = |DB| |DC| |DE| Proof: Find the appropriate similar triangles, and use the result from Example 6.22. Lemma 6.24. The angle between a cord and the tangent line at an end point is congruent to the inscribed angle opposite to the enclosed arc. A K B O C Proof: Let AB be a cord in circle O, AC the tangent line ¯ on the same side of at A. First, suppose that the arc AB AB as C is a short arc. Then let D on the supplementary ¯ such that DA is a diameter. Then ∠CAB ∼ arc of AB = ¯ being ∠ADB by similar right triangles. The case for AB supplementary to the short arc follows. D Corollary 6.25. Suppose P is a point exterior to the circle centered at O. Then p(D; O) = |P C|2 . Proof: Let `1 be a secant lines of the circle through P intersecting the circle at A, B; and `2 a tangent line of the circle through P with tangent point C. Then . . . . `1 C B O A P Proposition 6.26. Let D be a point, and and circle O has radius r, then p(D; O) = |OD|2 − r2 −−→ −−→ Proof: If D is on the circle, then A = D or B = D and p(D; O) = |DA| · |DB| = 0. In this case, |OD| = r and the equality holds. If D is interior to the circle, then let AB be the line through D and perpendicular to OD. Then D −−→ −−→ −−→ −−→ is the midpoint of AB and |DA| = −|DB|. It follows that |DA| · |DB| = −|AD|2 = −|r|2 + |OD|2 by Pythagorean theorem. If D is exterior to the circle, consider a tangent line DA, where A is the tangent point. Then 4OAD is a right triangle with right angle at A. It follows from Pythagorean theorem that p(D; O) = |DA|2 = |OD|2 − r2 . Corollary 6.27. From a point exterior to a circle, there are at most two tangent lines. The segments between the given point and the tangent points are congruent. Proof: From the previous corollary, the second half of the statement holds. It follows that the tangent points, if they exist, are intersections of two circles, and there are at most two of them. Proposition 6.28. The locus of all points whose powers with respect to two nonconcentric circles are equal is a line perpendicular to the line of centers of the two circles. The line is called the radical axis of the two circles. Proposition 6.29. There are exactly two tangent lines to a given circle from a point exterior to it. A O M B P Proof: Prove by construction. Let P be the point exterior to the circle O. Let M be the middle point of OP . The circle centered at M with radius OM intersects the circle O exactly at 2 points (by continuity axioms), say A and B. Then P A and P B are the tangent lines. Definition 6.30 (Incircle and excircle). Let I be the incenter of 4ABC. The distance from I to any side of 4ABC is called the inradius, denoted r. The circle with center I and radius r is the incircle 24 of 4ABC. Let Ia denote the excenter opposing to the vertex A. The distance from Ia to BC is called an exradius, denoted ra . The circle with center Ia and radius ra is an excircle of 4ABC. There are three excircles with centers respectively at the three excenters Ia , Ib and Ic , and exradii ra , rb and rc respectively. Then the incircle is tangent to all 3 sides at interior points. An excircle is tangent to one side at an interior point and the other two at exterior points. In 4ABC, let a = |BC|, b = |CA|, c = |AB| and s = 12 (a + b + c). Lemma 6.31. Let I 0 be the excenter opposing to A, and let X 0 , Y 0 and Z 0 be the tangent points of the excircle I 0 with BC, AC and AB respectively. Then |AY 0 | = |AZ 0 | = s. Y0 C b a A I0 X0 c B Z0 Proof: Note that |AY 0 | = |AZ 0 |, |BZ 0 | = |BX 0 | and |CX 0 | = |CY 0 | since each pair are tangent segments from the same point. We compute 2|AY 0 | = |AY 0 |+|AZ 0 | = c+b+|BX 0 |+|CX 0 | = a+b+c Thus |AY 0 | = s Lemma 6.32. Let I be the incenter of 4ABC and X, Y and Z be the respective tangent points of the incircle with the sides BC, CA and AB. Then |AY | = |AZ| = s − a, etc. Y C b X I A c a Proof: Note that |AY | = |AZ|, |BZ| = |BX| and |CX| = |CY | because each pair are tangent segments from the same point. It follows that take one from each pair, the sum of the lengths will be s: e.g. s = |AY |+|BX|+|CX| = |AY |+a ⇒ |AY | = s−a Z B Theorem 6.33 (Heron’s formula). In 4ABC, let a = |BC|, b = |CA| and c = |AB|. Let s = 1 (a + b + c). Then 2 » |4ABC| = s(s − a)(s − b)(s − c) L Proof: First, we find where does s come from. Let I be the incenter of 4ABC, and circle I be the incircle, which tangents to AC at K, to AB at Z to BC at X. Let r be the inradius of 4ABC, then |IK| = |IX| = |IZ| = r and K C X I0 I X0 A Z B Z0 |4ABC| = |4AIB| + |4BIC| + |4CIA| 1 = (|IZ| · |AB| + |IX| · |BC| + |IK| · |AC|) 2 1 = r(a + b + c) = sr 2 Next, we find where do the rest of the terms such as s − a = 12 (b + c − a) come from. Let circle I 0 be the excircle tangent to BC with the exradius r0 , and X 0 , L and Z 0 be the respective tangent points. Then 25 |I 0 X 0 | = |I 0 Z 0 | = |I 0 L| = r0 and |4ABC| = |4AI 0 B| + |4CI 0 A| − |4BI 0 C| 1 = (|I 0 Z 0 | · |AB| + |I 0 L| · |AC| − |I 0 X 0 | · |BC|) 2 1 = r0 (b + c − a) = (s − a)r0 2 Multiply these two equations, it gives |4ABC|2 = s(s − a)rr0 We show rr0 = (s − b)(s − c). Well, |CK| = s − c and |CL| = s − b. Since r = |IK| and r0 = |I 0 L|, −→ −→ the last step is to show that 4IKC ∼ 4CLI 0 . Since CI and CI 0 are angle bisectors for supplementary angles, it follows that ∠ICI 0 is a right angle. Since ∠I 0 LC and ∠IKC are also right angles, we see that ∠I 0 CL ∼ = ∠CIK. By AA criterion of similarity, it follows that 4IKC ∼ 4CLI 0 . From this, it gives r |IK| |CK| s−c = = 0 = ⇒ rr0 = (s − b)(s − c) s−b |CL| |I L| r0 » All together, we have |4ABC| = s(s − a)(s − b)(s − c) 0 From the proof of the Heron’s formula above, r = ra is one of the exradii. The proof could work with other choices of excircle and exradii, e.g. r0 = rb or rc . One can derive that Corollary 6.34. The inradius of 4ABC is s (s − a)(s − b)(s − c) s The inradius r and the three exradii ra , rb and rc are related by 1 1 1 1 = + + r ra rb rc r= 6.3. Nine point circle. This subsection aims to prove the theorem of nine-point circles. A Theorem 6.35 (Nine point circle). Let H be the orthocenter of 4ABC. The midpoints of the sides, the midpoints between the vertices and H (the Euler points), the feet of the altitudes, all lie on a circle, called the nine point circle. The center of this circle is the midpoint of the Euler line, and the radius of it is half of the circumradius of 4ABC. Y Z H F Q O C D Y Z F F E K P H H X X R A A B E K B Q P Q R C B 26 E K O X D R C Proof: The left figure above shows that the nine points indeed lie on the same circle. The segment QE (as well as P D or RF ) is one of the diameters. In the right figure above, we see that the various midpoints imply that QR ∼ = EF are half the length as BC. Similar congruences and SSS imply that ∼ 4P QR = 4DEF . To see that the radius is half of the circumradius, one only have to notice that 4DEF ∼ 4ABC and |DE| : |AB| = 1 : 2, and the nine-point-circle is the circumcircle of 4DEF . P H F E K Q O R H and O are respectively the orthocenters of 4P QR and 4DEF ; and K is the circumcenter for both 4P QR and 4DEF . From Example 5.33, P H ∼ = DO. Similarly, ∠ HK ∼ = OK. SSS implies that 4P HK ∼ = 4DOK. It ∼ follows that ∠KP H = ∠KDO. Since OD k P H, H and O are on opposite sides of P D. Since ∠DKO ∼ = ∠P KH, we see H ∗ K ∗ O and K is the midpoint of OH. D 6.4. Cyclic quadrilaterals. We show some interesting facts associated to cyclic quadrilaterals. We mention but do not prove the formula of Brahmagupta, a Hindu mathematician from 7th century B.C. Theorem 6.36. Let ABCD be a cyclic quadrilateral, with side lengths a, b, c and d. Let s = 1 (a + b + c + d), then 2 |ABCD| = » (s − a)(s − b)(s − c)(s − d) Letting d → 0, then ABCD turns into a triangle and the above formula becomes Heron’s formula for triangle areas. The proof involves much algebraic manipulation, together with trignometry and we will not pursue it here. Theorem 6.37 (Ptolemy’s). In the cyclic quadrilateral ABCD, the following holds |AB| × |CD| + |AD| × |BC| = |AC| × |BD| A B K A D B K C D C Proof: Let K be the point on BD such that ∠BAK ∼ = ∠CAD. (This can be done since ∠CAD < ∠BAD) Then in the left diagram, in the triangles 4BAK and 4CAD, the two pairs of marked angles are congruent (∠BAK ∼ = ∠CAD by construction and ∠ABD ∼ = ∠ACD opposing the same arc). Thus 4BAK ∼ 4CAD, which implies that |AB| |BK| = ⇒ |AB| × |CD| = |AC| × |BK| |AC| |CD| 27 In the right diagram, in the triangles 4BAC and 4KAD, the two pairs of marked angles are congruent (for similar reasons). Thus 4BAC ∼ 4KAD, which implies that |BC| |AC| = ⇒ |AD| × |BC| = |AC| × |KD| |KD| |AD| Since B ∗ K ∗ D, |BK| + |KD| = |BD| and it follows that |AB| × |CD| + |AD| × |BC| = |AC| × |KD| + |AC| × |BK| = |AC| × |BD| The example 6.22 is a special case of Ptolemy’s theorem Corollary 6.38. In an cyclic quadrilateral ABCD, if 4ABC is an equilateral triangle, then |AD| + |CD| = |BD| The converse of Ptolemy’s theorem is also true. Theorem 6.39 (Converse of Ptolemy’s). If a convex quadrilateral ABCD satisfies |AB| × |CD| + |AD| × |BC| = |AC| × |BD|, then it is cyclic. A B A K D B K D C C Proof: Construct K on the same side of AD as B and C, such that ∠KAD ∼ = ∠BAC and ∠ACB ∼ = ∼ ∠ADK. It follows that ∠BAK = ∠CAD. By AA similarity criterion, 4ABC ∼ 4AKD, from which it follows that ∠AKD ∼ = ∠ABC and |KD| |AD| |AK| = = |BC| |AC| |AB| From the first equality above, we obtain |AD| × |BC| = |AC| × |KD| and from the second equality together with ∠BAK ∼ = ∠CAD, we see that 4BAK ∼ 4CAD. It ∼ implies that ∠AKB = ∠ADC and |AB| |BK| = ⇒ |AB| × |CD| = |AC| × |BK| |AC| |CD| Thus |AB| × |CD| + |AD| × |BC| = |AC| × |BK| + |AC| × |KD| = |AC| × (|BK| + |KD|) The hypothesis implies that |BD| = |BK| + |KD| which happens iff B ∗ K ∗ D. It follows that ∠AKB ∼ = ∠ADC are supplementary to ∠AKD ∼ = ∠ABC, which implies that ABCD is cyclic. 28 Definition 6.40 (Pedal triangle). For a point P and a triangle 4ABC, the pedal triangle 4XY Z of P (could be degenerate) is the triangle formed by the feet X, Y and Z of the perpendicular lines from P to the lines BC, CA and AB. Example 6.41. Let H be the orthocenter, then its pedal triangle is the orthic triangle, with vertices the feet of altitudes. Let O be the circumcenter, then its pedal triangle is the median triangle, with vertices the midpoints of the sides. Lemma 6.42. For 4ABC, let X, Y and Z be the pedal points of the point P . Then the groups of four points {A, Y, P, Z}, {B, X, P, Z} and {C, Y, P, X} form cyclic quadrilaterals. Proof: By definition, ∠P Y C ∼ = ∠P XC are right angles. It follows that the circumcircle of 4P Y C and 4P XC are the circle with diameter P C. Thus {C, Y, P, X} form a cyclic quadrilateral. The other cases are similar. A Y Z P O B C X Let P be a point interior to 4ABC, and 4XY Z be its pedal triangle. Then P is also interior to 4XY Z. Let 4X2 Y2 Z2 be the pedal triangle of P in 4XY Z, which is called the second pedal triangle. Let 4X3 Y3 Z3 be the pedal triangle of P in 4X2 Y2 Z2 , which is called the third pedal triangle. Proposition 6.43. 4X3 Y3 Z3 ∼ 4ABC A Y X2 X2 Z Y Z Z3 Z2 Y2 Y3 Z2 Y2 B X3 C X X Proof: Follow the marked angles. The lemma and properties of cyclic quadrilaterals ⇒ ∠A ∼ = ∠X3 . Theorem 6.44 (Simson’s). Let P be a point on the circumcircle of 4ABC, then its pedal triangle is degenerate, i.e. the feet of the perpendicular lines to the sides are colinear. Proof: ∠P ZY ∼ = ∠P BX because P ZBX is cyclic; ∠ZP Y ∼ = ∠BAC since they are both supplementary to ∠ZAY , and then ∠BAC ∼ = ∠BP C. It follows that 4ZP Y ∼ 4BP C. Similarly, 4Y P X ∼ 4AP B (e.g. ∠Y P X ∼ = ∠Y CX ∼ = ∠AP B). Since ∠P AB and ∠P CB are supplementary, it follows that ∠P Y Z and ∠P Y X are supplementary as well. Thus X, Y and Z are colinear. Z P A Y O C X The line in Simson’s theorem is called the Simson’s line. The converse of Simson’s theorem also holds. 29 B Theorem 6.45 (Converse of Simson’s). For 4ABC and a point P , if the pedal triangle is degenerate, then P must be on the circumcircle. Proof: Using the same diagram as in Simson’s theorem. Using the lemma and the properties of cyclic quadrilateral, it can be shown that ∠P AY ∼ = ∠P BX, which implies that P ABC is cyclic. 7. Constructibility We consider the various geometry quantities that can be constructed using straightedge and compass, following the axioms of Euclidean geometry. 7.1. Constructible lengths. Fix a segment AB on a plane and suppose that |AB| = 1. What are the lengths that can be constructed by straightedge and compass in Euclidean geometry? Definition 7.1. A length a can be constructed if a segment can be constructed to have length a. A construction starts from three non-colinear points, as provided by the incidence axioms. A point is constructible if it is the given point, or is an intersection point of objects constructed from previously constructed points. A segment is constructible if both its end points are constructible. A circle is constructible if both its center and radius are constructible. An angle is constructible if its sides are determined by constructible points. Proposition 7.2. If a, b and c are constructible and satisfy the triangle inequality, then the triangle with side lengths a, b and c can be constructed. Lemma 7.3. If lengths a and b are constructible, then the length a + b is constructible. If a > b, then a − b is constructible. Proof: This is furnished by the in-between-ness and congruence axioms. Corollary 7.4. All integer lengths are constructible. Lemma 7.5. If lengths a and b are constructible, then the length a × b is constructible. −→ Proof: Construct 4ABC such that |AB| = 1 and |AC| = b (can take |BC| = 1). On AB, let F be the point such that |AF | = a, and D on AC such that DF k BC. Then |AD| = a × b. Lemma 7.6. If length a 6= 0 are constructible, then the length 1 a is constructible. Proof: Let circle O be a circle with radius 1 and CD a diameter. Let ` be the line through O and perpendicular to CD. On `, let E be a point such that |OE| = a, and F the other intersection point of CE with circle O. Let G be the intersection point of CF with `, then |OF | = a1 . Corollary 7.7. If lengths a and b are constructible and b 6= 0, then the length a b is constructible. Proof: This can also be shown using similar triangles: c = a × 1b . Construct 4ABC such that −→ |AB| = a and |AC| = b. On AC, let F be the point such that |AF | = 1, and D on AB such that DF k BC. Then |AD| = a × b. Corollary 7.8. If a ∈ Q and a > 0, then the length a is constructible. √ Lemma 7.9. If a is constructible, then a is constructible. −→ Proof: Let C be the point on AB such that A ∗ B ∗ C and |BC| = a. Let circle O be√the circle with AC as a diameter. On circle O, let D be the point such that DB ⊥ AC, then |DB| = a. 30 Claim √ 7.10. The length a is constructible iff it can be obtained from Q by repeatedly applying +, −, ×, ÷ and ·. In particular, the set of constructible lengths is a subset of the set of algebraic numbers. √ Example 7.11. • The golden ratio ϕ = 5−1 is constructible. 2 √ • π,qe and π are not constructible. √ √ 3−1 3 • 34 is constructible, while 2 is not. 2 2 • If the quadratic equation x − 2px + q 2 = 0, where p > 0, q 2 are constructible, has solutions, then the positive solution(s) can be constructed. √ It follows that one may not square a circle, which is related to the non-constructibility of π. Another √ famous non-constructible problem is doubling a cube, which is related to the non-constructibility of 3 2. 7.2. Polygons and non-constructibility. There is a simple correspondence between constructible lengths and constructible angles. Lemma 7.12. Let circle O be a circle with radius 1 and CD a cord. Then CD is constructible iff ∠COD is constructible. Definition 7.13. A convex polygon P is regular if • all its sides are congruent segments • and all its interior angles are congruent angles. Example 7.14. Equilateral triangles and squares are regular polygons. Proposition 7.15. Regular polygons are cyclic, i.e. they are inscribed to a circle. Consider the regular polygons inscribed in the unit circle. Then using trignometry, their side lengths can be computed in terms of the number of vertices. Thus, for a regular n-gon to be√constructible, its side length must only involve Q together with repeated application of +, −, ×, ÷ and ·. It’s then clear that the first couple of regular polygons can be constructed (in the unit circle): √ 3 • n = 3: equilateral triangle, side length is √ • n = 4: square, side length is 2 q √ • n = 5: regular pentagon, side length is 5−2 5 • n = 6: regular hexigon, side length is 1 • n = 7: regular heptagon, ? The state the relavant result precisely and concisely, one needs to use complex numbers and appeal to the theory of number fields. Here we will instead state the result about constructibility of regular n polygons, without proof. Let Fn = 22 + 1 be the n-th Fermat number. It’s known that 5 of them are prime numbers: F0 = 3, F1 = 5, F2 = 17, F3 = 257, F4 = 65, 537 No one knows yet if the Fermat numbers contain infinitely many prime numbers. Neither does one know if the Fermat numbers contain infinitely many non-prime numbers. The following is true Theorem 7.16. For n > 3, a regular n-gon is constructible using straightedge and compass iff n is of Q the form n = 2k i Fiεi , where ® εi = 0 0 or 1 if Fi is not a prime number if Fi is a prime number Gauss famously showed that regular 17-gon is constructible at the age of 19. The factor 2k is not important in the above expression. Proposition 7.17. If a regular n-gon is constructible, then a regular 2n-gon is as well. 31 Proof: This follows from the fact that angle bisector is constructible. Besides directly construct the angle bisector, that angle bisector is constructible can be seen from the following reasoning using » √ ∠A 1+a lengths. Let a = cos ∠A then x = cos( 2 ) = ·. , which only involves +, ÷ and 2 ∠A On the other hand, given an arbitraty ∠A, 3 is not constructible using only straightedge and compass. Let u = cos( ∠A ), then it is the solution of the equation 4u3 − 3u − a = 0. In general, this 3 √ equation does can not be solved using only · and the arithmetic operations. Note that this does not mean it’s impossible to trisecting any angle. In fact, it’s easy to see that trisect right angle or flat angle is perfectly constructible. Proposition 7.18. With the known Fermat prime numbers, there are exactly 31 constructible regular n-gons with odd n. In the following we describe the construction of a regular s pentagon. As stated before, the side length √ 5− 5 . Once this length is constructed, for a regular pentagon inscribed in a circle with radius 1 is 2 going around the circle with this length will produce the regular pentagon. A little algebra shows that à à s √ √ √ !2 Ç å2 1 5− 5 5−1 5 = + 1 while = +1 2 2 2 2 A A D B O E B F O C G The above diagrams shows the following steps of construction: (1) a circle with center O and radius 1 (2) a line ` through O, intersecting the circle at 2 points x and y (3) using the diameter, construct a perpendicular line of ` through O, intersecting circle O at two points: one of them is A (4) construct the midpoint B of Ox via its perpendicular bisector (done first diagram) (5) construct circle B with radius BA intersects with ` at two points and let C be the one such that B∗O∗C (6) the length AC has the desired length – side length of regular pentagon 8. Transformations 8.1. Klein. Here we are going to provide an alternative point of view at the definition of what is geometry. The approach and point of view we have been taking so far are the axiomatic one. We build up things from ground up, taking some self-evident facts as axioms and have logical derivation lead the way. We have already seen how different set of axioms will lead to different geometries, and will see this 32 more clearly when we come to some more details with non-Euclidean geometries later. We may take geometry to mean these theories built out from the different sets of axioms. Then the question still remains, why do we decide to call these theories geometry anyway? Why are the theories built from some axioms called algebra, or analysis, or set theory? Felix Klein, who preceeds David Hilbert and hired him to G¨ottingen, proposed in 1872 that geometry has something to do with transformations. If the theory studies properties of or classes of objects in “spaces” that are invariant under certain “groups” of transformations, then it can be said to be a geometry. Exactly what kind of geometry it is, depends on the group of transformations that it is associated with. In broad sense, we can take the following as a definition of a transformation Definition 8.1. Let X be a set which we will call a space, then a bijection / invertible map f : X → X is called a transformation on the space X. The following properties of transformations are straightforward. • The identity map id : X → X is a transformation • If f : X → X and g : X → X are transformations, f ◦ g is a transformation • If f : X → X is a transformation, then there is another transformation g such that f ◦ g = g ◦ f = id • If f : X → X, g : X → X and h : X → X are transformations, then f ◦ (g ◦ h) = (f ◦ g) ◦ h Definition 8.2. A set G of transformations on the space X is a transformation group if • id ∈ G • f, g ∈ G then f ◦ g ∈ G • f ∈ G then there exists g ∈ G such that f ◦ g = g ◦ f = id • f, g, h ∈ G then f ◦ (g ◦ h) = (f ◦ g) ◦ h Remark 8.3. The last item in the above definition is obvious for transformations, while is necessary for definition of a general group. Proposition 8.4. The Kleinian geometry of isometric transformations on R2 gives a model of the planar Euclidean geometry. We will not prove this statement. On the other hand, we will use this statement and apply the idea of transformation to geometric problems. In fact, in previous proofs, such as the nine-point-circle, you have already seen the idea of transformations. We can define isometric transformations using only the axioms of Hilbert as following. Definition 8.5. Let f be a transformation of points in Euclidean geometry. f is isometric if f takes any segment to a congruent segment. In this case, f is also called an isometry. This definition alone does not guarantee the existence of isometric transformations. Such transformations will be constructed below, which will imply the existence. It follows that it will take any triangle to a congruent triangle (by SSS criterion). Thus, it takes an angle to a congruent angle. From what we learned before, we see that isometry take a geometrical object into a congruent one. In order to see exactly which transformation group corresponds to Euclidean geometry, we will introduce coordinates and use a little linear algebra. On the vector space R2 , a point A is denoted (x, y), where x, y ∈ R are the coordinates of A. Let B = (u, v) ∈ R2 , then Definition 8.6. The Euclidean distance between A and B is d(A, B) = » (x − u)2 + (y − v)2 . Due to Pythagorean theorem, the Euclidean distance d(A, B) coincides with the length |AB| of the segment AB. Thus 33 Proposition 8.7. Isometric transformations on R2 are the transformations that preserve Euclidean distance. The fundamental isometric transformations are the following • translation • rotation • reflection The group of isometric transformations on R2 can be identified with O(2) n R2 , where O(2) is the set (group) of orthogonal matrices of size 2 × 2 consists of rotations and reflections; and R2 consists of translations. In fact, it can be shown that any isometry can be written into a composition of reflections, with respect to different lines. Example 8.8. Isometries preserves all the geometric relations, such as • If A∗B ∗C and P, Q and R are the respective images of the points A, B and C under an isometry, then P ∗ Q ∗ R • If AB k CD and M, N, P and Q are the respective images of the points A, B, C and D under an isometry, then M N k P Q • If C is interior to the angle ∠AOB and D, E, F and P are the respective images of the points A, B, C and O under an isometry, then F is interior to ∠DP E All these can be shown only using the definition that isometry takes any segment to a segment congruent to it. Other transformation groups provide models for the non-Euclidean geometries we will learn about a little later, the projective and hyperbolic geometries. The point of view of Klein generalizes much further and leads to very modern subjects like differential geometry (MA419), Riemannian geometry, symplectic geometry and such. 8.2. Translation. Translation can be defined using parallelograms (might be degenerate). Definition 8.9. Let AB be a segment. For each point P , its image under the translation given by AB −→ in the direction of AB is the last vertex of the paralellogram with two adjacent sides AB and AP . The paralellogram is degenerate if and only if the points A, B and P are colinear. By our definition, translation takes any line to a line parallel to it. When the axioms are interpreted as the usual Euclidean geometry, the interpretation of translation coincides with the usual notion of translation in the direction −→ of AB and length |AB|. Example 8.10. The cut and paste in the computation of the area of a parallelogram can be seen as one application of translation. 8.3. Rotation. Rotation can be defined using circle and congruent angles. Definition 8.11. Let ∠AOB be an angle. For each point P , its image under the rotation given by ∠AOB in the direction of A → B, is the point Q on the circle O with radius |OP | such that ∠P OQ ∼ = ∠AOB and ∠AOP ∼ = ∠BOQ. In particular, if P = O, then it’s the image of itself under the rotation. Rotations are isometric can be shown using the SAS criterion of triangle congruence. We use rotation to find the Fermat’s point of an acute triangle. This is a special case of the so called Steiner tree problem, which looks for points to minimize the total distances among a given number of points. This type of problems belongs to the glass of geometric optimization problems. Definition 8.12. Let 4ABC be a triangle, all the interior angles of which are acute. A point P is a Fermat’s point of 4ABC if |P A| + |P B| + |P C| is minimal among all points. 34 This definition does not guarantee the existence or uniqueness of the Fermat’s point. Proposition 8.13. Fermat’s point exists and is unique. In particular, if P is the Fermat’s point, then it is interior to 4ABC and ∠AP B ∼ = ∠BP C ∼ = ∠CP A. Proof: The construction is illustrated by the following diagrams: E F N A F E A Q P M P B C B C The diagram on the left illustrates the following construction, for an arbitrary point M : (1) Construct the equilateral triangle 4ACE, with E and B on opposite sides of AC (2) Construct the equilateral triangle 4AM N , such that N is the image of M under the rotation given by ∠CAE in the direction of C → E (3) Construct the equilateral triangle 4ABF , with F and C on opposite sides of AB (4) Let P be the intersection of CF with BE We show that 4AM N is an equilateral triangle. Since ∠M AN ∼ = ∠CAE and AM ∼ = AN by the definition of rotation, it follows that 4AM N ∼ 4ACE. Since 4ACE is equilateral, 4AM N is an equilateral triangle. It implies that AM ∼ = M N . Since rotation is an isometry, it follows that N E ∼ = M C. By triangular inequality |BM | + |AM | + |CM | = |BM | + |M N | + |N E| > |BE|. Similar construction with side AB shows that |BM | + |AM | + |CM | > |CF |. The diagram on the right illustrates the following construction and proof: (1) Construct the equilateral triangle 4ACE, with E and B on opposite sides of AC (2) Construct the equilateral triangle 4ABF , with F and C on opposite sides of AB (3) Let P be the intersection of CF with BE We show that P is the Fermat point, as well as the properties stated in the proposition. First, we show that CF with BE do intersect, by proving that F and E are respectively interior to ∠ACB and ∠ABC. We prove by contradiction. Assume that F is exterior to ∠ABC, say, F and B are on opposite sides of AC. Then ∠BAC is supplementary to an acute angle, which implies that ∠BAC is obtuse. This is contradiction and it follows that F and B are on the same side of AC. Similarly, F and A are on the same side of BC, which implies that F is interior to ∠ACB. The statement for E is similar. Then using the Crossbar Theorem twice implies that the segments intersect. The intersection point P is interior to both ∠ABC and ∠ACB, which implies that P is interior to the triangle 4ABC. Second, the rotation given by ∠CAE in the direction of C → E takes F to B. Thus 4F AC ∼ = 4BAE, in particular, CF ∼ = BE. Let Q be the image of P under this rotation, then P C ∼ = QE. Since F ∗ P ∗ C, it follows that B ∗ Q ∗ E. For similar reason as above, 4P AQ is an equilateral triangle, and P Q ∼ = AP . Third, since rotation preserves angles, ∠AP F ∼ = ∠AQB. Since 4P AQ is equilateral, ∠AQB ∼ = ∼ ∠ABF . Thus ∠AP F = ∠ABF and AP BF is cyclic. Since 4ABF is equilateral, P is on its 35 circumcircle, and it implies that |P A| + |P B| = |F P | (see Example 6.22). Thus |F C| = |F P | + |P C| = |P A| + |P B| + |P C| and P is the Fermat’s point. The uniqueness follows from the construction. 8.4. Reflection. Similarly, reflection can be defined with the Euclidean axioms Definition 8.14. Let ` be a line. For each point P , its image under the reflection with respect to the line ` is the point Q for which ` becomes the perpendicular bisector of P Q. In particular, if P lies on `, it’s the image of itself under the reflection. Using triangle congruency, one can show that reflections are isometric. Reflection can be used to solve geometric optimization problems as well. Example 8.15. Let A and B be points on the same side of `. Find point C on ` such that |AC| + |CB| is smallest among all points on `. Definition 8.16. Let 4ABC be an acute triangle and E, F and G be respectively the feet of altitudes from A, B and C. Then 4EF G is the orthic triangle of 4ABC. Proposition 8.17 (Fagnano’s problem). Let 4ABC be an acute triangle, and X, Y and Z be points on the respective sides BC, CA and AB. Then the perimeter of 4XY Z is minimized when 4XY Z is the orthic triangle. Proof: A A Q Y0 P E L Y F M X X0 B D C B K D C The optimization has two steps. The first step is fixing a point D on BC and determine the points E and F on the other two sides such that the perimeter of 4DEF is minimized. The construction is illustrated in the diagram on the left. Let X and Y be respectively the image of D under the reflection with respect to AB and AC. Then for any points Q on AB and P on AC, QD ∼ = QX and P D ∼ = PY . Let E and F be the intersection of XY with AC and AB respectively (which exist due to Crossbar Theorem), then the perimeter of 4DEF is given by |DE| + |EF | + |F D| = |XY | 6 |XQ| + |QP | + |P Y | by triangular inequality. Thus 4DEF minimizes the perimeter for the fixed D. Note that since X and Y are completely determined by D, the points E and F are completely determined by D. The second step is determining the point D such that the perimeter of 4DEF found in the previous step is minimized. The construction is illustrated in the diagram on the right. For any D on BC, the first step constructs 4AXY . The definition of reflection implies that • ∠XAB ∼ = ∠BAD and ∠Y AC ∼ = ∠DAC, it follows that ∠XAY = 2∠BAC ∼ ∼ • AX = AD = AY 36 This holds for any D. In particular, let K be the point on BC such that AK ⊥ BC, and 4AX 0 Y 0 be the triangle as constructed from K in the first step. Then SAS for similarity implies 4AXY ∼ 4AX 0 Y 0 and in particular, |X 0 Y 0 | |AX 0 | |AK| = = 61 |XY | |AX| |AD| as for all D 6= K, 4AKD is a right triangle with right angle at K. Let M and L be the intersections of X 0 Y 0 with AB and AC respectively, then the perimiter of 4KM L is given by |X 0 Y 0 |, which is minimal among the inscribed triangles. It implies that CM ⊥ AB and BL ⊥ AC. Assume otherwise, say, CM 6⊥ AB, then follow the same arguments as above, with the point F on AB, one finds another inscribed triangle with minimal perimeter, for which the point on BC is different from K. This is obviously contradiction. Thus, CM ⊥ AB and BL ⊥ AC, and 4KLM is the orthic triangle. 8.5. Similarity transformation. Other transformations besides isometries are also useful. Definition 8.18. Let f be a transformation of points in Euclidean geometry. For any points A, B and C, let D, E and F be respectively the image them under f . Then f is a similarity transformation if 4ABC ∼ 4DEF holds for all 4ABC. Lemma 8.19. Let f be a similarity transformation, then there is a number k > 0 ∈ R, such that |AB| = k|CD| for any pair of points A, B and their images c, D under f . The following defines a particular type of similarity transformation: Definition 8.20. Let O be a point and k > 0 ∈ R. Then the image of a point P under the scaling of −→ factor k with respect to O is given by a point Q on the ray OP such that |OQ| = k|OP |. Lemma 8.21. Scaling with respect to a point is a similarity transformation. Often, spiral is used to denote the composition of a rotation and a scaling with respect to the same point. It can be shown that any similarity transformation can be obtained as the composition of an isometry with a scaling. 8.6. Inversion. Given a circle, with center O and radius OP , a transformation of the points in Euclidean geometry except O can be defined using Example 6.6. Definition 8.22. Let OP be the radius of the circle O and A is a point different from O. The image of −→ A under the inversion with respect to the circle O is the point B on the ray OA such that |OA| × |OB| = |OP |2 . Example 8.23. Given a circle O and a point A, construct the inversion of A with respect to circle O. Inversions have many amazing properties: Proposition 8.24. Under the inversion with respect to the circle O (1) A point P coincides with its image iff P is on the circle O (2) A point P is exterior to the circle O iff the image of P is interior to the circle O (3) The image of a line or circle is either a line or a circle (4) Angles are preserved (after properly interpreting the angles defined by circles or lines) We will not have time to prove much here. There are more detailed statements for the last item above. This transformation is very useful in complex analysis and non-Euclidean geometry. 37 Proposition 8.25. For the circle O and line `, the image of ` under the inversion with respect to circle O is either the line ` (when ` passes through O) or a circle through O (when ` does not pass through O). Proof: The case when ` passes through O is clear. We show the other cases. P P P P0 O A A0 O P 0 P A O 0 A A0 Let R be the radius of the circle O. Since ` does not pass through O, there is a point A on ` such that OA ⊥ `. Let A0 be the image of A under the reversion with respect to circle O. We show that the image of ` is given by the circle with diameter OA0 . There are three cases, given by the relative position of the line with respect to the circle. The proof is identical for all cases. When ` is tangent to circle O, we think of it as A = A0 . ` and circle O do not intersect. Then A is exterior to circle O and A0 is interior to circle O. For any point P 6= A on `, let P 0 be the intersection point of OP with the circle with diameter OA0 , then ∠OP 0 A0 is a right angle. Thus 4OP 0 A0 ∼ 4OAP , from which it follows that |OP 0 | |OA0 | = ⇒ |OP 0 | × |OP | = |OA0 | × |OA| = R2 |OA| |OP | Namely, P 0 is the image of P under the reversion. This can be traced backwards and any point (except O) on the circle with diameter OA0 is an image of some point on `. Remark 8.26. From the first two diagrams in the above, we see that the image of the shaded circle under the inversion with respect to the circle O is the half plane to the right of the line `. −−→ Definition 8.27. Let α be an arc on the circle O with one end at P . The tangent ray of α at P is P D −−→ where D is a point on the tangent line at P such that DO intersects the arc. The angle formed by α −−→ −→ and P Q is the angle ∠QP D. Let α0 be an arc on the circle O with one end at P , and P D0 the tangent ray of α0 at P . The angle between the arcs α and α0 is the angle ∠DP D0 . Example 8.28. Show that in the last diagram above, the angle formed by the line ` and the circle O is congruent to the angle formed by its image and circle O. B O A A 0 Example 8.29. Given line ` and circle O, construct the image of ` under inversion with respect to the circle. Solution: For the case where ` intersects circle O, it is shown in the diagram to the left. 38 Example 8.30. Given circle O, show that the image of any circle that does not pass through O is a circle. Construct this image. C C0 O B0 P 0 A0 A P B Proof: The case when the circle P is to the exterior of the circle O is illustrated above. The proof for other cases are the same. Let A and B be the intersection points of OP with the circle P . Let C be any other point on circle P . Let A0 , B 0 and C 0 be the respective images of A, B and C under the inversion with respect to circle O. Then the proposition is equivalent to ∠A0 C 0 B 0 is the right angle. By definition of inversion and the SAS criterion of triangle similarity, we get |OA| × |OA0 | = |OB| × |OB 0 | = |OC| × |OC 0 | ⇒ 4OB 0 C 0 ∼ 4OCB and 4OA0 C 0 ∼ 4OCA Since ∠OB 0 C 0 ∼ = ∠OA0 C 0 + ∠B 0 C 0 A0 and ∠OCB ∼ = ∠OCA + ∠BCA, it follows that ∠B 0 C 0 A0 ∼ = ∠BCA is the right angle. Remark 8.31. In the above diagram, the point P 0 is the image of the point P 0 under the inversion. Notice that P 0 is not the center of the image circle. This is due to the non-linearity of the inversion transformation. Also, although we have ∠B 0 C 0 A0 ∼ = ∠BCA, it is not true that the triangles 4ABC and 4A0 B 0 C 0 are similar, since by exterior angle theorem, ∠CAB > ∠OCA ∼ = ∠C 0 A0 B 0 . 9. Non-Euclidean geometries 9.1. Projective geometry. First evidence of projective geometry came from arts, when people started trying to have perspectively correct paintings of scenes. On the one hand, all points on the same line of view is represented by the same point on the canvas. On the other hand, parallel lines seem to converge toward infinity at the same point. Each point at infinite corresponds to a direction. This points to the idea of interpreting lines in space as points on a plane, and have a correct geometry to study their relations. This gives rise to the projective geometry. Interpreting the terms as following: • lines in space through a given point as points on a plane • planes in space through the same given point as lines on a plane Then as indicated by example / assignment problems earlier in the course, the incidence axioms remain true. What about the rest of the axioms? They mostly hold, except for the in-between-ness and parallelism axioms that need rewritten and interpreted properly. The in-between-ness axioms become the seperation axioms: 39 (1) Let A, B, C and D be four points. If A, B seperate C, D, which is denoted (A, B|C, D), then the four points are collinear and distinct. (2) If (A, B|C, D), then (C, D|A, B) and (B, A|C, D), but not (A, C|B, D) (3) If points A, B, C and D are collinear and distinct, then one of (A, B|C, D), (A, C|B, D) or (A, D|B, C) is true. (4) If points A, B and C are collinear and distinct, then there exists a point D such that (A, B|C, D) (5) For any five distinct collinear points A, B, C, D and E, if (A, B|D, E), then either (A, B|C, D) or (A, B|C, E) A segment in projective geometry is then defined by three points instead of two: Definition 9.1. Let A, B and C be three collinear and distinct points, then the segment ABC consists of all points D such that A, C does not separate B, D. Remark 9.2. The notion of ray stops making sense now, as a line is separated into two segments according to the axioms. Thus, the notion of angle is to be defined using segments meeting at a point. The congruence axioms can then be stated, although the notion of sides has to be defined using the separation axioms apropriately. The parallelism axiom becomes the following Two lines always intersect. This sets projective geometry apart. The Alternate Interior Angle Theorem, which does not rely on the Euclidean parallelism axiom, together with the congruence axioms, shows that parallel lines exist. Here, projective geometry indicates that lines are never parallel. Thus, unlike hyperbolic geometry that will be talked about below, projective geometry is not a simple adaptation of Euclidean geometry. Using the interpretation of points as lines and lines as planes, certain Euclidean geometry statements can be interpreted as statements in projective geometry. Proposition 9.3. Let M be a point and `i , i = 1, 2, 3, 4 be four lines (on the plane) concurrent at M , such that `1 , `3 separates `2 , `4 . Let ` and `0 be any two lines that intersects with all four lines `i , respectively at A, B, C and D and A0 , B 0 , C 0 and D0 , such that (A, C|B, D) and (A0 , B 0 |C 0 , D0 ) then |AC| |BD| |A0 C 0 | |B 0 D0 | · = 0 0 · 0 0 |AD| |BC| |A D | |B C | Proof: The proof reduces to the case when A = A0 or D = D0 , which can be proven using Menelaus’ theorem. M M C D C B A A B A P 0 D B 0 Q P Q D0 C0 D0 40 The diagram on the left shows the step of reducing to the special cases. Suppose that the special cases are proven, then it follows that |AC| |BD| |AQ| |P D0 | |A0 C 0 | |B 0 D0 | · = · = · |AD| |BC| |AD0 | |P Q| |A0 D0 | |B 0 C 0 | The diagram on the right shows how to use Menelaus’ theorem for 4ABP to prove the special case where A = A0 . The other special case is completely similar. Remark 9.4. The proposition indicates that the quantity obtained from a line ` intersecting four concurrent lines |AC| |BD| {AB, CD} = · |AD| |BC| does not depend on the line `, as long as the separation of the points is (A, C|B, D). Thus, thinking of the lines `i , i = 1, . . . 4 as (projective) points on a (projective) line, this quantity defines a number for four (projective) points on the (projective) line. It’s called cross ratio, which can be defined axiomatically in projective geometry without referencing any models, using properties of it. From the point of view of Klein, projective geometry is associated to a group of transformations, which is called projective transformations. Then the following statement shows the importance of cross ratios in projective geometry: Theorem 9.5. If a transformation of a projective line preserves the cross ratios, then it is a projective transformation. This should be compared with the isometries in Euclidean geometry, which are defined to be those transformations that preserve lengths. Below we give some models of plane in projective geometry. (1) The first model is provided by interpreting points as lines in Euclidean 3-space passing through the origin, and lines as planes in Euclidean 3-space passing through the origin, and incidence to as a line lying on a plane in Euclidean 3-space. (2) The second model is basically the first one intersecting with the unit sphere in Euclidean 3-space. Here, the space of points is given by the unit sphere after identifying pairs of antipodal points, and the set of lines consist of what becomes of the great circles of the unit sphere, and the relation incidence to is given by the usual understand of a point lying on a line. (3) The third model is deduced from the second by taking half of the unit sphere, see it as a disc, and glue along the boundary by identifying the ends of the same diameter. In this model lines are given by arcs connecting opposite points on the boundary circle. These models are equivalent, as can be seen from the descriptions. Various properties of the projective plane can be seen from the models. (1) The first model shows that for each Euclidean n + 1-space, there is a corresponding projective n-space. For example, the projective line is simply a circle. This point of view facilitates the algebraic method of doing geometry in projective space, in which geometric objects are defined using polynomial equations with n + 1 variables. (2) The second model can be used to define lengths and areas for projective lines and polygons from those on a sphere in Euclidean space. It becomes evident that projective lines have the same finite length, although there is no end. Similarly, one sees that the sum of interior angles of a triangle in projective space exceeds a flat angle, and the area of the triangle is propotional to this difference. This will correspond to the fact that projective spaces have positive curvature, just like a sphere. 41 (3) From the third model, it shows that projective plane has only one side, i.e. it is non-orientable. In fact, deleting a smaller circle with center at origin and perform the gluing with the annulus that is left, one obtain a M¨obius band, which is non-orientable. It is a general fact that even dimensional projective spaces are non-orientable, while odd ones are. The facts mentioned in the above hint at respectively Algebraic geometry, Differential geometry and Topology. 9.2. Hyperbolic geometry. Change the parallelism axiom in Euclidean geometry to the following: For every line ` and every point P not incident to `, there are at least two lines incident to P and parallel to `. and we get the axioms that give rise to hyperbolic geometry. Gauss, Lobachevsky and Bolyai are the pioneers of hyperbolic geometry. Later, it was shown that Theorem 9.6. Euclidean geometry is consistent iff hyperbolic geometry is consistent. Many theorems we proved without the parallelism axiom would hold in hyperbolic geometry • Midpoint exists and is unique • Alternate Interior Angle Theorem: if the alternate interior angles are congruent, then the lines are parallel. • Exterior Angle Theorem: Exterior angle of a triangle is larger than any one of the remote interior angles • Crossbar Theorem While most of the things that we shown with the help of parallelism axiom will fail here • Converse of AIAT does not hold • Sum of interior angles of a triangle is always less than a flat angle • There does not exist a rectangle: in the sense that all four interior angles are right angles The first model of hyperbolic geometry is the Klein-Beltrami disc model. The set of points is the points in an open Euclidean disc. The lines are the Euclidean cords. Then through each point not on the cord, there are at least two cords that do not intersect with it. This is the simplest model and it realizes all the other axioms. Thus, the segments, angles and triangles in this model have dual interpretations, both from Euclidean geoemtry and hyperbolic geometry. The hyperbolic lengths are defined using (Euclidean) cross-ratios: |P Q|H = | ln({S, P ; Q, T })| where ST is a cord, and P , Q are points on the cord such that S ∗ P ∗ Q and P ∗ Q ∗ T . The defect of this model is that the segments and angles that are congruent in the Euclidean sense are no longer congruent in the hyperbolic sense. Thus, it is less intuitive for doing hyperbolic geometry. The word hyperbolic is made more explict in the second model, which is called the Lorentz model. We look at it from the point of view of projective geometry. The projective plane can be interpreted using the unit sphere in the Euclidean 3-space R3 . Here, instead of using the Euclidean metric in R3 , the following hyperbolic metric is used: dH (P, Q)2 = −(x − a)2 − (y − b)2 + (z − c)2 for P = (x, y, z) and Q = (a, b, c) The unit sphere now is the hyperboloid of two sheets: −x2 − y 2 + z 2 = 1 Take one of the sheets and it is the model of a hyperbolic plane. This model is closely related to the Poincar´e disc model below. From this model, it can be derived that the Kleinian group associated to the hyperbolic geometry (of dimension n) is the group O(1, n), which consists of matrices that preserves the quadratic form with signature (1, n). 42 The most visual models are the Poincar´e disc and half plane models. 1 They can be seen to be equivalent using the reversion with respect to an appropriately chosen circle. In the Poincar´e disc model, the set of points are the open unit disc: D2 = {(x, y)|x2 + y 2 < 1} The lines in the model are the arcs in the unit disc that are perpendicular to the boundary circle O of the disc. In terms of inversion with respect to the circle O, then The lines are arcs inside the disc on the circles which are preserved by the inversion with respect to the circle O. It then is easy to see that the hyperbolic parallelism axiom holds. Putting the Poincar´e disc in R3 on the plane z = 1, then it can be identified with the hyperboloid in the Lorentz model, using rays through the origin. It also shows that the hyperbolic length is not uniform across the disc. The ratio of the hyperbolic lengths with the Euclidean lengths goes to infinity when the points approach the boundary circle. In this model, the hyperbolic angles are congruent iff the corresponding Euclidean angles are congruent. It is also easy to see that the sum of interior angles of a hyperbolic triangles is always less than a flat angle. In fact, it can be shown that the area of a triangle is propotional to the defect, that is the difference between the angle sum and the flat angle. In particular, it follows that similarity does not make sense here – the interior angles of two triangles are congruent pairwisely iff the triangles are congruent. The Poincar´e half plane model is the inversion of the Poincar´e disc model under the inversion with respect to the circle {(x, y)|x2 + (y − 1)2 = 22 } We usually shift the half plane downward, so that it is given by H = {(x, y) : y > 0} Under the inversion, the hyperbolic lines are either vertical lines or semicircles with center on {y = 0}. The advantage of this model is the relation with complex numbers. The half plane H can be interpreted as the complex numbers with positive imaginary parts. Then the M¨obius transformations Ç å az + b a b z 7→ with ∈ SL(2; R) c d cz + d takes √ a given point to any other point in H. In fact, in terms of the coordinates (x, y), where z = x + y −1 the transformation above can be written down as Ä ä 1 2 2 (x, y) 7→ 2(ad + bc)x + ac(x + y ) + bd, y (cx + d)2 + y 2 Of course, the expression using complex numbers is much more succinct and useful. The subset SL(2; Z) of transformations corresponding to integer entries is very important for number theory. In fact, the proof of Fermat’s Last Theorem somehow is related to certain object called modular forms, which in its simplest forms, relates to H and SL(2; Z). Department of Mathematics, Wilfrid Laurier University, 75 University Ave. West, Waterloo, Ontario , Canada E-mail address: [email protected] 1When visual and hyperbolic are mentioned at the same time, one must also mention the name M. C. Escher. 43
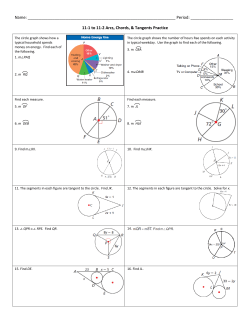








© Copyright 2026