
On the Sample Size of Randomized MPC for Chance-
On the Sample Size of Randomized MPC for ChanceConstrained Systems with Application to Building Climate Control
Xiaojing Zhang, Sergio Grammatico, Georg Schildbach, Paul Goulart and John Lygeros
Abstract— We consider Stochastic Model Predictive Control
(SMPC) for constrained linear systems with additive disturbance, under affine disturbance feedback (ADF) policies. One
approach to solve the chance-constrained optimization problem
associated with the SMPC formulation is randomization, where
the chance constraints are replaced by a number of sampled
hard constraints, each corresponding to a disturbance realization. The ADF formulation leads to a quadratic growth in the
number of decision variables with respect to the prediction horizon, which results in a quadratic growth in the sample size. This
leads to computationally expensive problems with solutions that
are conservative in terms of both cost and violation probability.
We address these limitations by establishing a bound on the
sample size which scales linearly in the prediction horizon. The
new bound is obtained by explicitly computing the maximum
number of active constraints, leading to significant advantages
both in terms of computational time and conservatism of the
solution. The efficacy of the new bound relative to the existing
one is demonstrated on a building climate control case study.
I. I NTRODUCTION
Model Predictive Control (MPC) is a powerful methodology for control design for systems in which state and
input constraints are present [1]. By predicting the future
behavior of the plant, MPC is able to incorporate feedforward
information in the control design. Such information may
come, for example, in the form of predictions or reference
tracking. At each sampling time, MPC requires to solve
a finite horizon optimal control problem (FHOCP), and to
implement the first element of the optimal control sequence.
One way of designing controllers is to assume an exact
model of the plant and perfect evolution of the states according to that model. In practice, however, disturbances arise
from both model uncertainty and prediction errors. The latter,
for example, is a challenging problem in building climate
control [2], [3], where the goal is to control the comfort
dynamics in a building. In this case, disturbances appear
due to the uncertainty in weather and rooms occupancy. In
general, within the MPC literature two main methods have
been studied to address uncertainty: robust and stochastic
MPC. Robust MPC computes a control law that guarantees
constraint satisfaction for all possible disturbance realizations
[4]. Although successful in many cases, this strategy may
lead to conservative controllers that exhibit poor performance
The authors are with the Automatic Control Laboratory, Department
of Electrical Engineering and Information Technology, Swiss Federal
Institute of Technology Zurich (ETH Zurich), 8092 Zurich, Switzerland.
{xiaozhan, grammatico, schildbach, pgoulart,
lygeros}@control.ee.ethz.ch.
This research was partially funded by a RTD grant from Swiss NanoTera.ch under the project HeatReserves.
in practice. This is due to the need to over-approximate the
uncertainty set to obtain a tractable problem formulation.
These limitations are partially overcome by adopting the
notion of Stochastic MPC (SMPC) [5], where the constraints
of the FHOCP are interpreted probabilistically via chance
constraints, allowing for a (small) constraint violation probability. Unfortunately, chance constrained FHOCPs are in
general non-convex and require the computation of multidimensional integrals. Hence, SMPC is computationally intractable for many applications.
Randomized MPC (RMPC) [6] is a new method to approximate SMPC problems. It is computationally tractable
without being limited to specific probability distributions. At
every time step, the chance constrained FHOCP is solved via
the scenario approach [7]–[9], which is a randomized technique for solving convex chance constrained optimization
problems. The basic idea is to replace the chance constraints
with a finite number of sampled constraints, which correspond to independently sampled disturbance realizations. The
sample size is chosen so that, with high confidence, the
violation probability of the solution of the sampled FHOCP
remains small.
An important challenge for the practical application of
RMPC is its requirement for a large sample size, even
for relatively small systems. A large sample size generates
equally many constraints, so that the resulting sampled
FHOCP becomes computationally expensive to solve, even if
it is convex. Moreover, the bound on the sample complexity
established in [8], [9] is tight for the class of “fully supported” problems, yet many MPC problems do not fall into
this category. This typically leads to conservative solutions,
both in terms of cost and empirical violation probability.
The authors in [10] try to alleviate this conservatism by
using a combination of randomized and robust optimization,
which can be successfully applied towards SMPC in openloop control. However, when the same approach is applied to
closed-loop policies using affine disturbance feedback (ADF)
[11], the solution usually becomes more conservative than
the standard RMPC approach. Unfortunately, in case of ADF
policies, the latter is expensive to solve in practice, because
the number of decision variables grows quadratically in the
prediction horizon. This results in a quadratic growth of
the sampled constraints, making RMPC with ADF almost
impossible to solve in practice, even if the problem remains
convex.
In this paper we attempt to overcome these limitations
by establishing a novel upper bound on the sample size for
RMPC based on the ADF policy. Instead of a quadratic
growth of the number of samples, our bound on the sample size grows linearly in the prediction horizon. This is
achieved by exploiting structural properties of the constraints
in the sampled FHOCP. We apply this improved bound to a
building control problem, where the sample size is reduced
significantly. We restrict to RMPC for linear systems, while
we refer to [12] for the case of nonlinear control-affine
systems, based on the non-convex scenario-approach results
in [13], [14].
In Section II we formulate the Stochastic MPC problem.
Section III summarizes the standard RMPC approach. We
describe the proposed methodology in Section IV, whereas
Section V discusses numerical results for the building control
case study. Conclusions are drawn in Section VI. The proofs
are given in Appendix.
II. MPC P ROBLEM D ESCRIPTION
A. Dynamics, constraints and control objective
We consider the following discrete-time affine system
subject to additive disturbance
x+ = Ax + Bu + V v + Ew,
(1)
where x ∈ Rnx is the state vector, x+ ∈ Rnx the successor
state, u ∈ Rnu the input vector, v ∈ Rnv a vector that is
known a priori, and A, B, V and E are matrices of appropriate dimensions. The vector w ∈ Rnw models the stochastic
disturbance. If N is the prediction horizon and wk , for
k ∈ {0, . . . , N −1}, the disturbance at the kth step, we define
the “full-horizon” disturbance as w := [w0 , . . . , wN −1 ].
We assume that w is defined by a probability measure P.
The distribution itself need not be known explicitly, but we
require that independent samples can be drawn according to
this distribution. In practical applications, the samples could
arise from historical data. Note that the wk at different times
inside w need not be independent and identically distributed
(i.i.d.).
We assume that at each prediction step k ∈ {1, . . . , N },
the state xk is subject to polyhedral constraints which may
be violated with a probability no greater than k ∈ (0, 1).
They can be expressed as
P[F xk ≤ f ] ≥ 1 − k ,
(2)
PN −1
k=0
`(xk , uk ) + `f (xN ),
In its most general setting, the control problem consists
of finding a control policy Π := {µ0 , . . . , µN −1 }, with
µk = µk (x0 , . . . , xk ) ∈ Rnu , which minimizes the cost in
(3) subject to the constraints in (2) and dynamics in (1). The
intuition is to take measurements of the past and current
states into account when computing future control inputs.
However, since it is generally intractable to optimize over
the function space of state feedback policies, a common
approximation is the affine disturbance feedback (ADF)
policy [11] of the form
Pk−1
uk := hk + j=0 Mk,j wj ,
(4)
where one optimizes over all Mk,j ∈ Rnu ×nw and hk ∈
Rnu . It is shown in [11] that (4) is equivalent to affine state
feedback, but gives rise to a convex problem.
If x is the initial state and we define wk := [w0 , . . . , wk−1 ]
as the restriction of w over its first k components, hk :=
[h0 , . . . , hk−1 ], and vk := [v0 , . . . , vk−1 ], then the state xk
can be expressed as
xk = Ak x + Mk wk + Bk hk + Vk vk + Ek wk ,
(5)
for suitable matrices Mk , Bk , Vk , and Ek . Note that due
to causality, the matrix Mk is strictly block lower triangular,
while Bk , Vk , and Ek are block lower triangular.
C. Stochastic MPC formulation
The Stochastic MPC (SMPC) problem is obtained by
combining (1) – (4). Therefore, at each sampling time, we
solve the following chance constrained FHOCP
min E[J(M, h)]
(6)
M,h
s.t.
P [F xk ≤ f ] ≥ 1 − k
∀k ∈ {1, . . . , N },
where E is the expectation associated to P and xk is as in
(5). The matrix M ∈ RN nu ×N nw is a strict block lower triangular matrix collecting all Mk,j and h := [h0 , . . . , hN −1 ].
Note that the problem in (6) has multiple chance constraints
(“multi-stage problem”), where each constraint must be
satisfied with a predefined probability of k .
Remark 1 (Input Constraints): To ease the presentation of
our results we consider only state constraints. Nevertheless,
our results can handle input constraints as well, provided
they are interpreted in a probabilistic sense.
III. R ANDOMIZED MPC
where F ∈ Rnf ×nx , f ∈ Rnf , and nf is the number of state
constraints. Note that each stage is viewed as one (joint)
chance constraint.
The control objective is to minimize a performance function of the form
J(u0 , . . . , uN −1 ) =
B. Affine disturbance feedback policy
(3)
where ` : Rnx × Rnu → R and `f : Rnx → R are strictly
convex functions, and {xk }N
k=0 satisfies the dynamics in (1)
under control inputs u0 , . . . , uN −1 .
In general, the chance constraints turn the FHOCP in (6)
into a non-convex and computationally intractable problem,
making SMPC impractical to implement. RMPC is one
method to obtain a tractable approximation, based on the
scenario approach [7]–[9]. In its original formulation, RMPC
uses one joint chance constraint for all constraints along
the horizon [6]. The authors in [15] propose an RMPC
formulation to cope with multiple chance constraints, as
discussed next.
(1)
(S )
For each stage k ∈ {1, . . . , N }, let {wk , . . . , wk k }
be a collection of samples, obtained by first drawing Sk
independent full-horizon samples according to P and then
restricting them to their first k components. The idea of the
scenario approach is to replace the kth chance constraint in
(6) with Sk hard constraints, each corresponding to a sample
(i)
wk , with i ∈ {1, . . . , Sk }, [7]–[9]. Hence, we solve the
sampled FHOCP
min E[J(M, h)]
(7)
M,h
s.t.
(i)
F xk ≤ f
∀i ∈ {1, . . . , Sk }, ∀k ∈ {1, . . . , N },
(i)
where xk is the ith predicted state. It is obtained by
(i)
substituting the ith sample wk into (5). In the interest of
space, we do not describe all technical details of the scenario
approach; instead, the interested reader is referred to [7] for
typical assumptions (convexity, uniqueness of optimizer, i.i.d.
sampling), and to [14] for measure-theoretic technicalities
about the well-definedness of the probability integrals.
The main challenge in RMPC is to establish the required
sample sizes Sk , so that the solution of (7) is feasible for
(6) with high confidence. Based on the results of [8], [9], it
was shown in [15] that if Sk satisfies
Pζk −1 Sk j
Sk −j
≤ βk ,
(8)
j=0
j k (1 − k )
where βk ∈ (0, 1) is the confidence parameter, then the
solution of (7) is feasible for the kth constraint in (6) with
confidence at least 1 − βk . The parameter ζk is the socalled support dimension (s-dimension) [15, Definition 4.1],
and upper bounds the number of support constraints [7,
Definition 4] of the kth chance constraint. We call a sampled
constraint a support constraint if its removal changes the
optimizer. An explicit lower bound on the sample size was
established in [16] as
e
.
(9)
ζk − 1 + ln β1k
Sk ≥ 1k e−1
Thus, for fixed k and βk , it follows that Sk ∼ O(ζk ), so
that problems with a lower ζk require fewer samples.
Unfortunately, explicitly computing ζk is difficult in general, and usually an upper bound has to be computed. As
reported in [10, Section III], the standard bound
k(k − 1)
=: dk ,
(10)
2
always holds, where dk is the number of decision variables
up to stage k. Hence using the standard bound, Sk scales as
O(k 2 nu nw ), which is quadratic along the horizon k 1 . This
quadratic growth makes the application of RMPC challenging because of the number of sampled constraints that need
to be stored in the computer memory and processed when
solving the optimization problem. Moreover, if the sample
size is chosen larger than necessary, the obtained solution
ζk ≤ knu + nu nw
PN
1 If the total number of samples is denoted by S :=
k=1 Sk , then
S grows as O(N 3 nu nw ) using the standard bound in (10). To simplify
discussion, we compare the sample sizes Sk of the individual stages. Hence,
if we say “quadratic growth” along the horizon, we refer to Sk rather than
S. From Faulhaber’s formula, the total number of samples has a growth
rate that is 1 order higher compared to the individual stages.
becomes conservative in terms of violation probability and
consequently in terms of cost.
Section IV presents tighter bounds on the s-dimension ζk
by exploiting structural properties of the constraint functions.
IV. R EDUCING THE S AMPLE S IZE
We here provide two methods to upper bound the stagewise s-dimensions ζk for the FHOCP in (7). The first bound
is obtained by exploiting structure in the decision space. The
second bound exploits structure in the uncertainty space and
scales linearly in k. In general, the first bound performs well
for small k, whereas the second is better for larger k. Hence,
the minimum among them should be taken to obtain the
tightest possible bound.
A. Structure in the decision space
One way of bounding the stage-wise s-dimensions ζk is
to exploit structural properties of the constraint function in
(2) with respect to the decision space. To this end, we recall
the so-called support rank (s-rank) ρk from [15, Definition
4.6].
Definition 1 (s-rank): For k ∈ {1, . . . , N }, let Lk be the
largest linear subspace of the decision space RdN , with dN
(i)
as in (10), that remains unconstrained by F xk ≤ f for all
(i)
sampled instances wk almost surely. Then the s-rank of the
kth chance constraint is defined as
ρk := dN − dim(Lk ).
Note that dN is the total number of decision variables of the
sampled FHOCP in (7). We know from [15, Theorem 4.7]
that the s-rank upper bounds the s-dimension, i.e. ζk ≤ ρk .
The next statement establishes an explicit bound on the srank for the FHOCP in (7).
Proposition 1: For all k ∈ {1, . . . , N }, the s-rank ρk of
the sampled FHOCP in (7) satisfies
k(k − 1)
+ min{rank(F ), knu }.
2
Proposition 1 consists of an improvement upon the standard
bound in (10), but still scales quadratically along the horizon.
ρk ≤ n u n w
B. Structure in the uncertainty space
Another way of obtaining a bound on ζk is to find an
upper bound on the number of active constraints, which we
define for the kth chance constraint as follows.
(i)
Definition 2 (Active Constraint): The sample wk
∈
(1)
(S )
{wk , . . . , wk k } is called an active sample for the kth
stage and generates an active constraint if, at the optimal
(i)
(i)
solution (M? , h? ) of (7), F xk = f , where xk is the
(i)
trajectory generated by (M? , h? ) and wk according to (5).
For any stage k ∈ {1, . . . , N }, let the set Ak ⊆ {1, . . . , Sk }
index the active samples and |Ak | denote its cardinality.
From [8, pag. 1219], we have that the s-dimension ζk is
bounded by the number of active contraints as follows.
Lemma 1: For all k ∈ {1, . . . , N }, ζk ≤ |Ak |.
For constraint functions of general structure, it is not easy to
determine |Ak |. For FHOCP in (7), however, such a bound
can be found under the following assumption.
Assumption 1 (Probability Measure): The random variable w is defined on a probability space with an absolutely
continuous probability measure P.
Note that a probability measure is absolutely continuous if
and only if it admits a probability density function. Under
this assumption, the next proposition provides a bound on
the number of active constraints.
Proposition 2: For all k ∈ {1, . . . , N }, the number of
active constraints of the sampled FHOCP in (7) almost surely
satisfies
|Ak | ≤ nf knw .
Unlike the bounds dk and ρk , |Ak | does not depend on the
number of decision variables at all, but rather on the dimension of the uncertainty affecting the kth state. Moreover, it
shows that the s-dimension scales at most linearly in the
prediction horizon as O(knw ), as opposed to O(k 2 nw nu )
when using dk or ρk . Moreover, Proposition 2 suggests
that for the same probabilistic guarantees, plants subject to
fewer uncertainties (smaller nw ) require a smaller sample
size compared to plants affected by higher dimensional
uncertainties.
Remark 2: Note that Assumption 1 does not allow for
“concentrated” probability masses. While it might seem
restrictive in general, this is not the case for many practical applications. For example in building climate control,
the main disturbances are due to the uncertainty in future
temperatures, solar radiation, and occupancy, which can be
assumed to arise from continuous distributions. Indeed, even
occupancy can take continuous values. This is because the
system model is discretized, but people enter and leave a
room at arbitrary times.
We refer to [17] for similar sample-size bounds where
Assumption 1 is released.
C. Combining the bounds
In general, the bounds ρk and |Ak | will not be the same
since they depend on the dimension of the decision and
uncertainty space, respectively. To obtain the tightest possible
bound, the minimum among both should be taken when
upper bounding the s-dimension.
Theorem 1: For all k , βk ∈ (0, 1), with k ∈ {1, . . . , N },
if Sk satisfies (8) with
o
n
k(k − 1)
+ min{rank(F ), knu }
min nf knw , nu nw
2
in place of ζk , with confidence no smaller than 1 − βk , the
optimal solution of the sampled FHOCP in (7) is feasible for
each chance constraint in (6).
Note that for k = 1, ρk ≤ |Ak |, while for larger k we have
|Ak | ≤ ρk because |Ak | grows linearly in k compared to ρk .
V. A PPLICATION TO B UILDING C LIMATE C ONTROL
In this section we consider a case study in building climate
control, where we regulate the room temperature of an office
room. In the spirit of [3], we use historical data or scenarios
in ensemble forecasting to construct samples for weather
prediction uncertainty, without having to know the exact
distribution. We use the reduced model presented in [18].
The system dynamics are affine in the form of (1). The
vector xk = [xk,1 , xk,2 , xk,3 ]> ∈ R3 is the state vector,
where xk,1 is the room temperature, xk,2 the temperature
of the inside wall, and xk,3 the temperature of the outside
wall. The weather and occupancy prediction is modeled by
the vector vk = [vk,1 , vk,2 , vk,3 ]> ∈ R3 where vk,1 is the
outside air temperature, vk,2 the solar radiation, and vk,3 the
occupancy. We investigate three cases in which we allow the
uncertainty w to have different dimensions varying between
nw ∈ {1, 2, 3}. For nw = 1 we only assume uncertainty in
vk,1 , for nw = 2 uncertainty in vk,1 and vk,2 , and for nw = 3
uncertainty in all three predicted components.
The control objective is to keep room temperature above
21◦ C with minimum energy cost. Four constrained inputs
uk ∈ R4 represent actuators commonly found in Swiss
office buildings: a radiator heater, cooled ceiling, floor
heating system, and mechanical ventilation for additional
heating/cooling purposes. TheP
minimum energy requirement
N
is modeled by a linear cost E[ k=0 c> uk ]. The probabilistic
state constraint can be expressed as P [xk,1 ≥ 21] ≥ 1 − k
for every k = 1, . . . , N . For the purpose of illustration and
to keep computation short, we select N = 8, k = 0.2 and
βk = 0.1 for all k ∈ {1, . . . , N }.
In the following, we compare the performance of the
sampled FHOCP using the new bound from Theorem 1
with rank(F ) = 1 and nf = 1, versus the standard bound
based on (10). We focus on the following three questions:
sample size, computational complexity, and conservatism of
the solution.
A. Sample size
Table I lists the sample complexity of nw = 1, 2, 3. The
sample sizes Sk are obtained by numerical inversion of (8).
It can be seen from Table I that the new bound dramatically
improves upon the standard one of (10). Indeed, for this
particular example the total number of samples S based on
Theorem 1 is almost an order of magnitude lower than the
one obtained using the standard bound.
TABLE I
P
C OMPARISON OF THE TOTAL NUMBER OF SAMPLES S := 8k=1 Sk ,
FOR nw ∈ {1, 2, 3}.
S=
P
k
Sk
nw = 1
new
standard
nw = 2
new
standard
nw = 3
new
standard
277
491
694
2729
4500
6254
TABLE II
AVERAGE CPU TIMES TO SOLVE RMPC FOR nw = 1, 2, 3 FOR
DIFFERENT HORIZON LENGTH N .
0.12
0.1
pr e de fine d
ne w bound
s t andar d bound
Solver
times
N
N
N
N
N
=8
= 16
= 24
= 32
= 40
nw = 1
new
standard
61 ms
750 ms
5.7 s
26 s
1.5 min
560 ms
16 s
3.2 min
#
#
nw = 2
new
standard
450 ms
4.2 s
36 s
5.5 min
12 min
2.0 s
1.3 min
#
#
#
nw = 3
new
standard
480 ms
11 s
2.5 min
27 min
75 min
4.1 s
3.4 min
#
#
#
βk
0.08
0.06
0.04
0.02
0
1
2
3
4
B. Computational complexity
The difference in the sample size also influences the computation time and memory usage when solving the sampled
FHOCP in (7). Table II reports the average solver times
and Table III the required memory allocation to formulate
the sampled problem for different values of the prediction
horizon N ∈ {8, 16, 24, 32, 40}. We note that prediction
horizons of 40 hours are common in building control. In
fact, [3] has observed that longer horizons improve the
performance of the MPC controller. The timings in Table
II are taken on a server running a 64-bit Linux operating
system, equipped with 16-core hyperthreaded Intel Xeon
processor at 2.6 GHz and 128 GB memory (RAM). We use
the solver CPLEX interfaced via MATLAB 2013a.
TABLE III
R EQUIRED MEMORY ALLOCATION FOR CONSTRAINT MATRICES IN
RMPC FOR nw = 1, 2, 3.
Memory
N
N
N
N
N
nw = 1
new
standard
nw = 2
new
standard
5
6
7
8
time [h]
#: Out of memory error from MATLAB.
nw = 3
new
standard
= 8 6.2 MB 60 MB 21 MB 187 MB 44 MB 383 MB
= 16 81 MB 1.4 GB 287 MB 5.0 GB 614 MB 10.6 GB
= 24 373 MB 9.8 GB 1.3 GB 36 GB 2.87 GB 77.5 GB
= 32 1.1 GB 39 GB 4.0 GB 146 GB 8.77 GB 320 GB
= 40 2.6 GB 116 GB 9.6 GB 437 GB 21 GB 963 GB
Table II shows that our new bound dramatically reduces
the computational times required to solve the sampled program. Moreover, due to the linear scaling of the sample size
in the prediction horizon, we are now able to solve problems that could not be managed previously due to memory
problems, indicated by “#” in Table II. The reason for that
can be explained by Table III. For N = 32, for example,
the sampled FHOCP based on the standard bound can not
be solved, even for nw = 1. On the other hand, the sampled
FHOCP based on the new bound remains manageable in
practice even for nw = 3, allowing the problem to be solved
on most hardware.
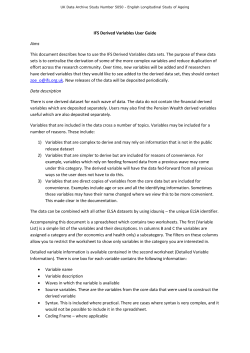
C. Conservatism of the solution
A poor bound on the sample size not only results in an
excessive number of samples, but also introduces conservatism into the solution, both in terms of violation probability
Fig. 1. Predefined βk (“red”), empirical estimate of βk using the new
bounds (“black”), and empirical estimate of βk using the standard bounds
(“blue”) for nw = 1.
TABLE IV
C OMPARISON OF EMPIRICAL COST FOR nw ∈ {1, 2, 3}.
Cost
N =8
nw = 1
new
standard
100.87
102.24
nw = 2
new
standard
103.92
107.70
nw = 3
new
standard
103.94
107.95
and cost. Fig. 1 depicts the empirical estimate of βk over
the prediction horizon for the case nw = 1. We observe
that the empirical confidence level using the new bound is
much closer to the predefined value of βk = 0.1 than the
standard bound. Since the new bound results in more frequent
violations (but remains smaller than a predefined acceptance
level), it also results in a lower cost, as displayed in Table
IV. From there we also see that the solution based on the
new sample size results in lower cost, allowing us to save
more energy in building control in all three cases.
VI. C ONCLUSION
In this paper, we have proposed new bounds on the
sample sizes for RMPC problems with additive uncertainty
and polyhedral constraints. The obtained bound results in
a sample size that scales linearly in the prediction horizon instead of quadratically, as for previous bounds. This
leads to less conservative solutions and dramatically reduces
the computational cost. The building control case study
has demonstrated that previously computationally infeasible
problems can now be solved.
A PPENDIX
Proof of Proposition 1
Let k ∈ {1, . . . , N }. The part “ρk ≤ nu nw k(k−1)
+
2
knu =: dk ” is the standard bound in (10) and follows immediately from
causality of the system in (5), where the decision
N −2
variables hk , . . . , hN −1 ; {Mk,j }k−1
j=0 , . . . , {MN −1,j }j=0
do not constrain the kth stage.
For
the
second
part,
note
that
the
kth
constraint can be expressed as gk (M
,
h
)
:=
k k
F Ak x + Mk wk + Bk hk + Vk vk + Ek wk − f ≤ 0,
where (Mk , hk ) are decision
variables. Clearly, for all
˜ k ∈ hk : F Bk hk = 0 the constraint gk (Mk , h
˜k ) ≤ 0
h
remains the same for all Mk . Hence, dim(Lk ) is at least
dim(null(F Bk )) = knu − rank(F Bk ), where the equality
is due to the Rank-Nullity Theorem. Thus, ρk is at most
+ rank(F ).
dk − (knu − rank(F Bk )) ≤ nu nw k(k−1)
2
Proof of Proposition 2
(1)
(S )
Let k ∈ {1, . . . , N }, and ωk := {wk , . . . , wk k } ⊂
knw
R
be a collection of Sk i.i.d. samples. Furthermore, let
the set Ak [ωk ] ⊆ {1, . . . , Sk } index the active samples of the
kth stage. Then, let us first prove the following supporting
statement.
Claim 1: For F ∈ R1×nx and f ∈ R, we almost surely
have
|Ak [ωk ]| ≤ knw .
Proof: We define p(Mk ) := F (Mk +Ek ) and q(hk ) :=
F (Ak x + Bk hk + Vk vk ) − f , so that the ith sampled
constraint at step k reads
(i)
p(Mk )wk + q(hk ) ≤ 0,
∀i ∈ {1, . . . , Sk }.
(11)
2
Let us assume that p(Mk ) 6= 0 for any Mk . This implies
that, for any pair (Mk , hk ), (11) can be interpreted as a
halfspace in Rknw , separated by a halfplane of the form
H(Mk , hk ) := wk ∈ Rknw p(Mk )wk + q(hk ) = 0 .
From linear algebra we know that knw points in “general position” uniquely define a hyperplane in Rknw . By
Assumption 1 it follows that, with probability one, any
(1)
(kn )
¯k ,...,w
¯k w }
collection of knw drawn samples ω
¯ := {w
uniquely defines a hyperplane. Since hyperplanes are affine
sets of dimension (knw − 1), their measure with respect to
Rknw is zero. Therefore, the probability of another sample
(kn +1)
¯k w
w
lying on the hyperplane defined by ω
¯ is zero.
Since the argument holds for any hyperplane H defined by
any (Mk , hk ), it also holds for the particular hyperplane
H(M?k , h?k ) associated with the solution (M? , h? ) of (7).
By inspection of (11) and the definition of an active sample
(Definition 2), it can be seen that all active samples lie on
the hyperplane H(M?k , h?k ). This concludes the proof of the
claim.
Let now F ∈ Rnf ×nx and f ∈ Rnf . It follows from the
above claim that for each row of the constraint, with probability one we have at most knw active samples. Therefore,
with nf constraints, with probability one we immediately get
at most nf knw active samples. This concludes the proof. 2 For any M it can be verified that the condition p(M ) 6= 0 is satisfied
k
k
whenever F E 6= 0. For most practical systems, the latter is satisfied because
F E = 0 would imply that the constraint is not affected by uncertainty.
In this degenerate case, there is no need to consider uncertainty for the
constraint. Thus, such a constraint can be ignored for the purpose of this
paper.
Proof of Theorem 1
By means of Lemma 1 and [15, Theorem 4.7] we have
ζk ≤ min{ρk , |Ak |}. By taking ρk and |Ak | as in Propositions 1 and 2, respectively, the statement follows immediately
from [15, Theorem 5.1].
R EFERENCES
[1] D. Q. Mayne, J. Rawlings, C. Rao, and P. Scokaert, “Constrained
model predictive control: stability and optimality,” Automatica, vol. 36,
pp. 789–814, 2000.
[2] F. Oldewurtel, A. Parisio, C. N. Jones, D. Gyalistras, M. Gwerder,
V. Stauch, B. Lehmann, and M. Morari, “Use of model predictive
control and weather forecasts for energy efficient building climate
control,” Energy and Buildings, vol. 45, pp. 15–27, 2012.
[3] X. Zhang, G. Schildbach, D. Sturzenegger, and M. Morari, “Scenariobased MPC for energy-efficient building climate control under weather
and occupancy uncertainty,” in Proc. of the IEEE European Control
Conference, Zurich, Switzerland, 2013.
[4] M. V. Kothare, V. Balakrishnan, and M. Morari, “Robust constrained
model predictive control using linear matrix inequalities,” Automatica,
vol. 32, no. 10, pp. 1361–1379, 1996.
[5] M. Cannon, B. Kouvaritakis, and X. Wu, “Probabilistic constrained
MPC for multiplicative and additive stochastic uncertainty,” IEEE
Trans. on Automatic Control, vol. 54, no. 7, pp. 1626–1632, 2009.
[6] G. C. Calafiore and L. Fagiano, “Robust model predictive control via
scenario optimization,” IEEE Trans. on Automatic Control, vol. 58,
2013.
[7] G. Calafiore and M. C. Campi, “The scenario approach to robust
control design,” IEEE Trans. on Automatic Control, vol. 51, no. 5,
pp. 742–753, 2006.
[8] M. C. Campi and S. Garatti, “The exact feasibility of randomized
solutions of robust convex programs,” SIAM Journal on Optimization,
vol. 19, no. 3, pp. 1211–1230, 2008.
[9] G. C. Calafiore, “Random convex programs,” SIAM Journal on Optimization, vol. 20, no. 6, pp. 3427–3464, 2010.
[10] X. Zhang, K. Margellos, P. Goulart, and J. Lygeros, “Stochastic model
predictive control using a combination of randomized and robust
optimization,” in Proc. of the IEEE Conf. on Decision and Control,
Florence, Italy, 2013.
[11] P. J. Goulart, E. C. Kerrigan, and J. M. Maciejowski, “Optimization
over state feedback policies for robust control with constraints,”
Automatica, vol. 42, no. 4, pp. 523–533, 2006.
[12] X. Zhang, S. Grammatico, K. Margellos, P. Goulart, and J. Lygeros,
“Randomized nonlinear MPC for uncertain control-affine systems with
bounded closed-loop constraint violations,” in IFAC World Congress,
Cape Town, South Africa, 2014.
[13] S. Grammatico, X. Zhang, K. Margellos, P. Goulart, and J. Lygeros,
“A scenario approach to non-convex control design: preliminary
probabilistic guarantees,” in Proc. of the IEEE American Control
Conference, Portland, Oregon, USA, 2014.
[14] ——, “A scenario approach for non-convex control design,” IEEE
Trans. on Automatic Control (submitted), 2014.
[15] G. Schildbach, L. Fagiano, and M. Morari, “Randomized solutions to
convex programs with multiple chance constraints,” SIAM Journal on
Optimization (in press), 2014.
[16] T. Alamo, R. Tempo, and A. Luque, “On the sample complexity of
randomized approaches to the analysis and design under uncertainty,”
in Proc. of IEEE American Control Conference, 2010.
[17] X. Zhang, S. Grammatico, G. Schildbach, P. Goulart, and J. Lygeros,
“On the sample size of random convex programs with structured
dependence on the uncertainty,” Automatica (submitted), 2014.
[18] F. Oldewurtel, C. N. Jones, and M. Morari, “A tractable approximation
of chance constrained stochastic MPC based on affine disturbance
feedback,” in Proc. of IEEE Conference on Decision and Control,
2008, pp. 4731–4736.











© Copyright 2026