
DYNAMIC FRICTION CHARACTERISTICS OF PNEUMATIC ACTUATORS AND THEIR MATHEMATICAL MODEL
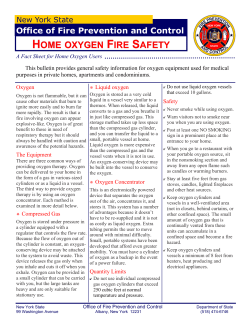
Proceedings of the 8th JFPS International Symposium on Fluid Power, OKINAWA 2011 Oct. 25-28, 2011 2D2-4 DYNAMIC FRICTION CHARACTERISTICS OF PNEUMATIC ACTUATORS AND THEIR MATHEMATICAL MODEL Xuan Bo TRAN* and Hideki YANADA** * Mechanical & Structural Systems Engineering Toyohashi University of Technology 1-1, Hibarigaoka, Tempaku-cho, Toyohashi 441-8580, Japan (E-mail: [email protected]) ** Department of Mechanical Engineering Toyohashi University of Technology 1-1, Hibarigaoka, Tempaku-cho, Toyohashi 441-8580, Japan ABSTRACT This paper deals with dynamic friction characteristics in the gross-sliding regime of pneumatic cylinders. Using three pneumatic cylinders, friction characteristics are investigated and modeled under various conditions of velocity and pressures. It is shown that a hysteresis loop behavior can be seen at low velocities in the friction force-velocity relation and the friction force varies nearly linearly with the velocity at high velocities. The hysteresis loop is expanded to higher velocity when the frequency of the velocity variation is increased, and its size increases with increasing driving pressure and decreases with increasing resistance pressure. It is shown that these behaviors can be relatively accurately modeled by the modified LuGre model. The pressures have influence on the maximum static friction force, the Coulomb friction force and the Stribeck velocity of the model. KEY WORDS Friction, Dynamic behavior, Pneumatic actuator, Mathematical model hss NOMENCLATURE a Ai Fc FL Fr Frss Fs g h : : : : : : : : : : acceleration piston area (i=1,2) Coulomb friction force force acting on load cell friction force steady-state friction force maximum static friction force Stribeck function dimensionless dynamic lubricant film thickness Kf m n pi ps v vb vs 657 : : : : : : : : : : : : dimensionless steady-state lubricant film thickness proportional constant for lubricant film thickness mass of the pneumatic piston exponent for Stribeck curve pressure (i=1,2) supply pressure velocity velocity at maximum film thickness Stribeck velocity Copyright © 2011 by JFPS, ISBN 4-931070-08-6 z σ0 σ1 σ2 τh τhp τhn τh0 : : : : : : : : : : : : mean deflection of bristles stiffness of bristles micro-viscous friction coefficient for bristles viscous coefficient time constant for lubricant film dynamics time constant for acceleration period time constant for decelation period time constant for dwell time model by incorporating lubricant film dynamics into the model and it has been shown that the proposed model, called the modified LuGre model, can simulate dynamic behaviors of friction observed in hydraulic cylinders with a relatively good accuracy [10-12]. However, the validity of the modified LuGre model in simulating the dynamic friction characteristics of pneumatic cylinders has not been investigated. In this paper, first a new experimental test setup is developed to examine dynamic friction characteristics of pneumatic cylinders under various operating conditions of velocity variation and pressures in the cylinder chambers. The modified LuGre model is then used to simulate the dynamic friction characteristics measured. A parameter investigation is also conducted to identify the influence of the pressures in the cylinder chambers on the modified LuGre model’s parameters. INTRODUCTION Friction is always present in pneumatic actuator systems and makes the dynamics of pneumatic position/velocity control systems rather complex and precise position/velocity control is usually difficult. It is, therefore, necessary to investigate the friction characteristics and develop a suitable friction model for pneumatic actuators to improve the control performance of pneumatic actuator systems. However, it is extremely difficult to obtain friction characteristics of a pneumatic actuator when the actuator is pneumatically operated due to the difficulties in controlling the velocity of the actuator. Several experimental methods have been proposed to investigate the friction characteristics of pneumatic actuators [1-3]. Schoroeder and Singh [1] proposed an experimental test setup in which the friction force was calculated by detecting the force exchanged by the rods of the tested pneumatic cylinder and of a load pneumatic cylinder assembled with a reversed working direction. Belforte et al. [2] proposed an experimental test setup in which the velocity of the test pneumatic cylinder was controlled by a driving hydraulic cylinder and the pressures of the chambers were controlled by pressure-proportional valves in order to measure the friction force under a broad range of operating conditions of velocity and pressures. Nouri [3] proposed an experimental test setup to identify the friction force in both the pre-sliding and gross-sliding regimes of a rodless cylinder. However, these experimental methods mainly focused on investigating the friction characteristics under steady-state conditions. To the best of the authors' knowledge, the friction characteristics of pneumatic actuators under dynamic conditions have not fully been investigated. Several mathematical models that describe the dynamic behaviors of friction have been proposed so far [4-9] and among them, the LuGre model [6] is most widely utilized. However, all these models cannot simulate well the friction behaviors of a hydraulic cylinder in the gross-sliding regime as shown in [10]. Yanada and Sekikawa [10] have made a modification to the LuGre TEST SETUP AND EXPERIMENTS The test setup used in this investigation is shown in Figure 1. It consists of a pneumatic cylinder under test and an electro-hydraulic servo cylinder system. The pneumatic piston was driven by the hydraulic piston in order to precisely control the velocity of the pneumatic piston. Pressures in two chambers of the pneumatic cylinder were independently controlled by using two proportional valves (pressure type). The valves provide air flow up to 0.025 m3/s and allow controlling the pressures up to 0.65 MPa. The motion of the hydraulic cylinder was controlled by a computer through an amplifier and a servovalve. The supply pressure of the servovalve was set at 2 MPa, providing enough force to drive the pneumatic piston. A load cell with a rated output of 500 N and with an accuracy less than 0.15% R.O., which was set between the rod of the pneumatic cylinder and the rod of the hydraulic cylinder, was used to measure the force acting on the pneumatic piston. Two pressure sensors with an accuracy less than 2% F.S. were used to measure the pressures, p1, p2, in the cylinder chambers, and the piston velocity, v, was measured using a tachometer generator with a ripple of less than 2% by converting linear motion of the piston to rotational motion through a pulley and belt system. The values of velocity, pressures, and force from the sensors were read into a computer through an A/D converter and the computer provided the control signals to the proportional valves and servovalve though a D/A converter. The acceleration, a, of the piston was calculated by an approximate differentiation of the piston velocity accompanied by a first-order low pass filter with 50 Hz cutoff frequency. The velocity of the pneumatic cylinder, v, and the pressures, p1, p2, were controlled by using PID control laws. Experimental data, i.e., velocity, v, pressures, p1, p2, and acceleration, a, were recorded at the interval of 0.5 ms (2 kHz). 658 Copyright © 2011 by JFPS, ISBN 4-931070-08-6 Figure 1 Schema of experimental test setup The friction force, Fr, is obtained from the equation of motion of the pneumatic piston using the measured values of the pressures in the cylinder chambers, the inertia force and the force acting on the load cell as follows: Fr = p1 A1 − p 2 A2 − ma + FL the experimental result. MODIFIED LUGRE MODEL Yanada and Sekikawa [10] have extended the LuGre model [6], called the modified LuGre model, for simulating the dynamic friction behaviors of hydraulic cylinders by incorporating a dimensionless lubricant film thickness parameter, h, into the Stribeck function. The model is described by (1) where m is the mass of the pneumatic piston, A1, A2 are the piston areas, and FL is the force acting on the load cell. Three different pneumatic cylinders were used for the experiments: standard, smooth, and low speed cylinders. They are of the same size but have different operating conditions of the velocity and pressure as shown in Table 1. In this experiment, dynamic friction force-velocity characteristic was measured under different conditions of the velocity and pressures. The input velocity of the pneumatic piston was varied sinusoidally in both the extending and retracting strokes of the cylinder between 0.005 and 0.12 m/s at three different frequencies of 0.5, 2, and 4 Hz. Pressures, p1 and p2, in the cylinder chambers were varied between 0 and 0.6 MPa. Every experiment was conducted three times to verify the repeatability of σ 0z dz =v− v dt g (v, h ) Fr = σ 0 z + σ 1 (2) dz + σ 2v dt (3) where z is the mean deflection of the elastic bristles, v is the velocity between the two surfaces in contact, Fr is the friction force, σ0 is the stiffness of the elastic bristles, σ1 is the micro-viscous friction coefficient, and σ2 is the viscous friction coefficient. g(v,h) is a Stribeck function that expresses the Coulomb friction and the Stribeck Table 1 Specifications of pneumatic cylinders tested Specifications Bore diameter (mm) Rod diameter (mm) Stroke (mm) Operating velocity (mm/s) Operating pressure (MPa) Standard cylinder 50 - 750 0.05 - 1 659 Smooth cylinder 25 10 300 5 - 500 0.02 - 1 Low speed cylinder 0.5 - 300 0.005 - 1 Copyright © 2011 by JFPS, ISBN 4-931070-08-6 effect and is given by g ( v , h ) = Fc + [(1 − h ) F s − Fc ]e − ( v vs ) n (4) where Fc is the Coulomb friction force, Fs corresponds to the maximum static friction force, vs is the Stribeck velocity, and n is an appropriate exponent. The lubricant film dynamics can be given by dh 1 = ( hss − h ) dt τ h (5) ⎧τ hp (v ≠ 0, h ≤ hss ) ⎪ τ h = ⎨τ hn (v ≠ 0, h ≥ hss ) ⎪τ (v = 0) ⎩ h0 (6) ⎧⎪ K | v | 2 / 3 ( v ≤ vb ) hss = ⎨ f 2/3 ( v > vb ) ⎪⎩K f | vb | (7) K f = (1 − Fc Fs )|vb |−2 3 (8) a) Velocity variation (f=0.5 Hz) where hss is the dimensionless steady-state lubricant film thickness parameter, Kf is the proportional constant for lubricant film thickness, vb is the velocity at which the steady-state friction force becomes minimum, and τhp, τhn, and τh0 are the time constants for acceleration, deceleration, and dwell periods, respectively. In Eq. (6), h<hss corresponds to the acceleration period, h>hss to the deceleration period. For steady-state, friction force is given by Frss = Fc + [(1 − h ss ) Fs − Fc ]e − ( v v s ) + σ 2 v n b) Friction force vs. velocity Figure 2 Dynamic friction force-velocity characteristics for three pneumatic cylinders in extending stroke (p1=0.3 MPa, p2=0 MPa) pneumatic cylinders. The hysteresis loops of the smooth and low speed cylinders are relatively small as compared to the one of the standard cylinder. At high velocities, the friction forces are increased nearly linearly with the velocity. Figure 3 shows dynamic friction force-velocity characteristics measured in the retracting stroke of three pneumatic cylinders. In this case, the pressures, p1 and p2, in the cylinder chambers were kept constant at 0 and 0.3 MPa, respectively. As can be seen from Figure 3(b), the hysteresis behavior can be obtained only for the standard cylinder at small velocities. For the smooth and low speed cylinders, the friction force varies almost linearly with the velocity in the whole velocity range. Figure 4 shows dynamic friction force-velocity characteristics of the standard cylinder measured at three different frequencies of velocity variation: 0.5, 2, and 4 Hz, for both the extending and retracting strokes. It is shown in Figure 4(a) for the case of extending stroke that when the frequency is increased, the hysteresis loop is expanded to higher velocities and becomes larger. In addition, a reduction of the friction force at small velocities can be seen when the frequency is increased. For the case of retracting stroke in Figure 4(b), it is shown that the hysteresis loop is also expanded to higher velocities but becomes smaller when the frequency is increased. The effects of the frequency of velocity (9) The static parameters of the modified LuGre model, Fs, Fc, vs, vb, n, and σ2, can be identified experimentally from steady-state friction force-velocity characteristic and the dynamic parameters, σ0, σ1 and τh, can be identified experimentally by the methods proposed in [11]. RESULTS AND DISCUSSION Figure 2 shows dynamic friction force-velocity characteristics measured in the extending stroke of three pneumatic cylinders. Figure 2(a) shows the sinusoidal velocity variation of the pneumatic piston and Figure 2(b) shows the friction force versus velocity curves. The pressures, p1 and p2, in the cylinder chambers were controlled and kept constant at 0.3 and 0 MPa, respectively. It is shown in Figure 2(b) that a hysteresis behavior can be obtained from the friction force-velocity curves at small velocities ( v ≤ 0.02 m/s ) for all the three 660 Copyright © 2011 by JFPS, ISBN 4-931070-08-6 a) Velocity variation (f=0.5 Hz) a) Effect of p1 (p2=0 MPa, f=0.5 Hz) b) Friction force vs. velocity Figure 3 Dynamic friction force-velocity characteristics for three pneumatic cylinders in retracting stroke (p1=0 MPa, p2=0.3 MPa) b) Effect of p2 (p1=0.6 MPa, f=0.5 Hz) Figure 5 Dynamic friction force-velocity characteristics under different pressures in extending stroke (standard cylinder) variation on the dynamic friction force-velocity characteristics for the smooth and low speed cylinders are similar to those for the standard cylinder. Figure 5 shows the effects of pressures, p1 and p2, on the dynamic friction force-velocity characteristics for the standard cylinder in the extending stroke. In this case, p1 is the driving pressure and p2 is the resistance pressure. Figure 5(a) shows the effect of pressure, p1, when the pressure, p2, is kept constant at 0 MPa, and Figure 5(b) shows the effect of pressure, p2, when the pressure, p1, is kept constant at 0.6 MPa. As can be seen from Figures 5(a) and 5(b) that the hysteresis loop becomes larger with increasing pressure, p1, and becomes smaller with increasing pressure, p2. Figure 6 shows the effects of pressures, p1 and p2, on the dynamic friction force-velocity characteristics for the standard cylinder in the retracing stroke. In this case, p2 is the driving pressure and p1 is the resistance pressure. Figure 6(a) shows the effect of pressure, p2, when the pressure, p1, is kept constant at 0 MPa, and Figure 6(b) shows the effect of pressure, p1, when the pressure, p2, is kept constant at 0.6 MPa. As can be seen from Figures 6(a) and 6(b) that the hysteresis loop becomes larger with increasing pressure, p 2 , and becomes smaller with increasing pressure, p1. From the results obtained in Figures 5 and 6, it can conclude that the driving pressure makes hysteresis loop larger and the resistance pressure a) Extension (p1=0.3 MPa, p2=0 MPa) b) Retraction (p1=0 MPa, p2=0.3 MPa) Figure 4 Dynamic friction force-velocity characteristics under different frequencies (standard cylinder) 661 Copyright © 2011 by JFPS, ISBN 4-931070-08-6 a) Effect of p2 (p1=0 MPa, f=0.5 Hz) a) Effect of p1 (p2=0 MPa) b) Effect of p1 (p2=0.6 MPa, f=0.5 Hz) Figure 6 Dynamic friction force-velocity characteristics under different pressures in retracting stoke (standard cylinder) b) Effect of p2 (p1=0.6 MPa) Figure 7 Relations between the pressures and the model parameters in extending stroke (standard cylinder) makes hysteresis loop smaller. The effects of the pressures on the dynamic friction force-velocity characteristics for the smooth and low speed cylinders are similar to those for the standard cylinder. Based on the experimental results, all the parameters of the the modified LuGre model were identified at different conditions of the pressures, p1 and p2, for three cylinders. In this paper, only the identification results for the case of extending stroke are shown. The results identified for three cylinders at a condition of p1=p2=0 MPa are shown in Table 2. For other conditions of pressures, the identification results show that the values of the maximum static friction force (Fs), the Coulomb friction force (Fc) and the Stribeck velocity (vs) of the modified LuGre model are changed with the pressures while other parameters are unchanged. Figure 7 shows the relations between the values of the parameters, Fs, Fc, vs, and the pressures, p1, p2 for the standard cylinder. It is shown in Figure 7 that the value of Fc increases with both p1 and p2, while the values of Fs and vs increase with p1 and decrease with p2. Figure 8 shows comparisons between the dynamic friction characteristics measured and the ones simulated by the modified LuGre model for the standard, smooth and low speed cylinders. The simulations were done using MATLAB/Simulink. As can be seen from Figure 8, all the simulated results are in good overall agreement with the measured results. However, the hysteresis behaviors of the smooth and low speed cylinders at small velocities are hardly simulated by the modified LuGre model. Figures 9 shows the simulation results obtained by the modified LuGre model and needs to be compared with the experimental results shown in Figure 4(a) for the effect of the frequency. The comparison shows that the modified LuGre model cannot predict the expansion of the hysteresis loop in the measured result when the Table 2 Values of parameters of the modified LuGre model for three cylinders at p1=0 MPa, p2=0 MPa Parameters Fs0 [N] Fc0 [N] vs0 [m/s] vb [m/s] n σ2 [Ns/m] σ0 [N/m] σ1 [Ns/m] τhp [s] τhn [s] τh0 [s] Standard cylinder 16 5 0.005 0.025 2.5 25 1.5×104 0.1 0.02 0.15 20 Smooth cylinder 3.6 3.6 0.005 0.025 0.5 72 1.5×104 0.1 0.01 0.2 20 Low speed cylinder 4.5 4.5 0.005 0.025 0.5 53 1.5×104 0.1 0.01 0.2 20 662 Copyright © 2011 by JFPS, ISBN 4-931070-08-6 a) Standard cylinder a) Effect of p1 (p2=0 MPa) b) Effect of p2 (p1=0.6 MPa) Figure 10 Simulation results corresponding to Figure 5 b) Smooth cylinder frequency is increased; as shown in Figure 9, the hysteresis loop predicted by the modified LuGre model becomes smaller by increasing the frequency. However, the model can predict the reduction of the friction force at small velocities when the frequency is increased. The reason for the discrepancy between the simulated results and measured ones obtained in Figures 8 and 9 may be due to the effects of other factors of mechanism, which is not clear at present and are not taken into account in the modified LuGre model. Figure 10 shows the simulation results obtained by the modified LuGre model and needs to be compared with the experimental results shown in Figure 5. The comparison shows that the modified LuGre model can predict accurately the variation of the hysteresis loop when the pressures are varied. c) Low speed cylinder Figure 8 Comparison between measured and simulated results for three pneumatic cylinders (p1=0.3 MPa, p2=0.0 MPa, f=0.5 Hz) CONCLUSION In this paper, dynamic behaviors of friction of pneumatic cylinders are experimentally investigated at various conditions of velocity and pressures. The experimental results show that a hysteresis behavior can be obtained at low velocities in the dynamic friction force-velocity relation and the friction force varies nearly linearly with the velocity at high velocities. The hysteresis loop is expanded to higher velocity when the frequency of the velocity variation is increased, and its size increases with Figure 9 Simulation results corresponding to Figure 4(a) 663 Copyright © 2011 by JFPS, ISBN 4-931070-08-6 of Friction and Simulation, J Dynam Syst Measurement Control, 1991, 113-3, pp.354–62. 6. Canudas de Wit, C., Olsson, H., Åström, K. J., and Linschinsky, P., A New Model for Control of Systems with Friction, IEEE Trans. Automatic Control, 1995, 40-3, pp.419-425. 7. Dupont, P.E. and Dunlop, E.P., Friction Modeling and PD Compensation at Very Low Velocities, J Dynam Syst Measurement Control, 1995,117-1, pp.8–14. 8. Swevers, J., Al-Bencer, F., Ganseman, and C.G., Prajogo, T., An integrated friction model structure with improved presliding behavior for accurate friction compensation, IEEE Trans Automatic Control, 2000, 45-4, pp.675–86. 9. Dupont, P., Hayward, V., Armstrong, B., and Altpeter, F., Single state elastoplastic friction models, IEEE Trans Automatic Control, 2002, 47-5, pp.787–92. 10. Yanada, H., and Sekikawa, Y., Modeling of Dynamic Behaviors of Friction, Mechatronics, 2008, 18-7, pp.330-339. 11. Yanada, H., Takahashi, K., and Matsui, A., Identification of Dynamic Parameters of Modified LuGre Model and Application to Hydraulic Actuator, Trans. Japan Fluid Power System Society, 2009, 40-4, pp.57-64. 12. Tran, X. B., Matsui, A., and Yanada, H., Effects of Viscosity and Type of Oil on Dynamic Behaviors of Friction of Hydraulic Cylinder, Trans. Japan Fluid Power System Society, 2010, 41-2, pp.28-35. the driving pressure and decreases with the resistance pressure. It is shown that these behaviors can be relatively accurately modeled by the modified LuGre model. The pressures have influence only on the maximum static friction force, the Coulomb friction force and the Stribeck velocity. ACKNOWLEDGEMENT The authors would like to express their gratitude to Prof. Y. Wakasawa for his help in part of the experiments and to SMC Corporation for donating the major pneumatic components used in the investigation. REFERENCES 1. 2. 3. 4. 5. Schroeder, L.E. and Sigh, R., Experimental Analysis of Friction in a Pneumatic Actuator at Constant Velocity, ASME J. Dynam. Syst. Meas. Contr., 1993, 115-3, pp.575-577. Sc Belforte, G., Mattiazzo, G., and Mauro, S., Measurement of Friction Force in Pneumatic Cylinders, Tribol. J., 2003, 10-5, pp.33-48. Nouri, Bashir M. Y., Friction Identification in Mechatronic Systems, ISA Trans., 2004, 43, pp. 205-216. Armstrong-Helouvry B., Dupont P., and Canudas de Wit C., A Survey of Models, Analysis Tools and Compensation Methods for the Control of Machines with Friction, Automatica, 1994, 30-7, pp.1083–138. Haessig Jr D.A., and Friedland B., On the Modeling 664 Copyright © 2011 by JFPS, ISBN 4-931070-08-6









© Copyright 2026