
Elsevier Editorial System(tm) for Pattern Recognition Letters Manuscript Draft Manuscript Number: PRLETTERS-D-13-00229R1
Elsevier Editorial System(tm) for Pattern Recognition Letters
Manuscript Draft
Manuscript Number: PRLETTERS-D-13-00229R1
Title: Mobility Analysis of the Aged Pedestrians by Experiment and Simulation
Article Type: Special Issue: SIPRCA
Keywords: Cellular Automata; pedestrian; crowd dynamics; aging society
Corresponding Author: Dr. kenichiro shimura,
Corresponding Author's Institution: The University of Tokyo
First Author: Kenichiro Shimura
Order of Authors: Kenichiro Shimura; Kazumichi Ohtsuka; Giuseppe Vizzari; Katsuhiro Nishinari;
Stefania Bandini
Confirmation of Authorship
Pattern Recognition Letters
Authorship Confirmation
Please save a copy of this file, complete and upload as the “Confirmation of Authorship” file.
As corresponding author I,_Kenichiro Shimura, hereby confirm on behalf of all authors that:
1. This manuscript, or a large part of it, has not been published, was not, and is not being
submitted to any other journal.
2. If presented at or submitted to or published at a conference(s), the conference(s) is (are)
identified and substantial justification for re-publication is presented below. A copy of
conference paper(s) is(are) uploaded with the manuscript.
3. If the manuscript appears as a preprint anywhere on the web, e.g. arXiv, etc., it is identified
below. The preprint should include a statement that the paper is under consideration at
Pattern Recognition Letters.
4. All text and graphics, except for those marked with sources, are original works of the
authors, and all necessary permissions for publication were secured prior to submission of
the manuscript.
5. All authors each made a significant contribution to the research reported and have read and
approved the submitted manuscript.
Signature_____________________________________Date 22/Aug.2013
List any pre-prints:
N/A
Relevant Conference publication(s) (submitted, accepted, or published):
Workshop on Pattern Recognition and Crowd Analysis (PRCA12) in conjunction with ICPR 2012,
Tsukuba, Japan, 11 November 2012.
Justification for re-publication:
This paper is for the special issue associated with the conference stated above.
*Revision note
Dear Editors
Regarding to the Pare # PRLETTERS-D-13-00229
Title: Mobility Analysis of the Aged Pedestrians by Experiment and Simulation
Author: Kenichiro Shimura; Kazumichi Ohtsuka; Giuseppe Vizzari; Katsuhiro Nishinari; Stefania
Bandini
First of all, we thank you very much for processing our paper. The paper is revised based
on the reviewers’ comments. Together with the revised manuscript, we attach the answer to each
reviewer in the following pages.
Best Regard
Answers to Reviewer#1
Dear Reviewer#1
Thank you for your careful reading and for giving useful comments toward our manuscript.
First of all, the typographical errors and inappropriate expressions are corrected. Also the main text
and figures are revised according to the reviewer’s comments. The following are the points of
revision.
1, Acceleration and breaking time of the pedestrians.
We consider the pedestrian can make immediate start and stop unless he is running. This is
a one of the differences between cars and pedestrians. In the experiment, at the starting moment we
can observe a starting wave but this effect is due to the restriction of the mobility (e.g. if other
pedestrians are in front, the one is not able to move.). of cause particularly looking at the starting
wave in detail acceleration issue me become significant, but in this case it is negligible because we
are interested in the behaviour in steady state. Thus acceleration is not considered in the model.
2, CA grid and the corresponding size and relationship to the floor tiles
Floor tiles are used as reference for participants to maintain the constant speed wile
experiment. Beside for the simulation, the grid size is considered as 40cm x 40cm grid is considered.
3, Computational burden and language.
We use MATLAB for simulation. The computational time is mater of second for this
calculation size. Moreover for reference, simple 2D pedestrian model with 256x256 cells with
pedestrian density of 0.5 (32768 pedestrians), it takes about 50 seconds for 1 time step with
graphical output using 3.80 GHz Corei7 without parallelization.
4, NaSch traffic model and intriguing points for transformation of normal to slow pedestrian.
At first the basic concept of NaSch model is to implement acceleration and deceleration.
This means that the cars (or in general namely “particles” in wide sense including pedestrians) can
move more than 1 cells in 1 time step. Then the velocity of a particle can be expressed as “number of
cells moved in 1 time step”. If applying NaSch model to Normal and Slow pedestrian case, by
saying, e.g. Normal moves 5 cells at a step and slow moves 3 cells at a step. in case that the Normal
"transformed" to Slow, then those transformed “particles” moves 3 cells lather than 5 cells after
transformation. This is good way to implement heterogeneous velocity. Beside in our model, we
have implemented the velocity by changing the transition probability. Thus in any case if the
velocity of pedestrian changes, then it can be expressed by changing the transition probability of
corresponding pedestrians.
Answers to Reviewer#2
Dear Reviewer#2
Thank you for in-depth reading on our manuscript. We are greatly appreciated for detailed
comments and suggestions. We have made major revision on the main text to add more details on the
modelling part. And also the introduction part is enriched to make clear of the point for this paper.
1, The definition of the aging rate
The aging rate is defined as ratio of elderly population to that of the younger populations.
According to WHO’s definition, the “elderly” is defined as those who are over 65 years old while
“younger” is those who are younger than that.
2, regarding to the ransition rules and Eq. (1)
We are agree that the expression of those particles do not move for m_{i-1,j}^t and
n_{i-1,j}^t are missing. However as it is suggested, Eq. 1 is replaced by graphical expression of the
transition rules. The explanations of the rules are also added in the main text. And also some mistake
in the expression on transition probability is corrected. i.e. for successful overtake; P_{O}( 1P_{N} ) -> P_{O} P_{N} which is a expression error and it does not affect to the results.
3 Update method.
The update method is more appropriately called “particle oriented shuffled update” but
with some modification on implementing the transition probabilities to avoid spatial deviation in
between the pedestrian in the same group. Details are added to the main text.
4, expanding introduction and typographic errors
The introduction is enriched according to the reviewer’s comments and suggested
references are included. Explanation of the framework and the points of interests for this paper made
clearer. And also grammatical, spelling and typographic errors are corrected.
Answers to Reviewer#3
Dear Reviewer#3
Although the journal is focused on pattern recognition this paper is for the special issue
including crowd analysis. Counting crowd and analysing the dynamics is greatly difficult. Thus we
are trying to make a hybrid image analysis. This idea is to include prediction in to detection
algorithm. Thus authors think this paper is in the scope of this special issue.
APPENDIX: COMMENTS FORM THE REVIEWERS
Reviewer #1:
Reviewer #1: In this paper the authors present a Cellular Automaton (CA) model for the analysis of
mobility of aged pedestrians. The paper beyond the CA model analysis is granted with a series of
experimental studies regarding the pedestrian behavior of elderly people when mixed up with normal
speed/younger persons. In every case, the simulation results are found in good agreement with the
experimental ones and, consequently, the proposed CA model successfully represents pedestrian
dynamics fundamental phenomena such as the pedestrian formation and travel time.
This reviewer believes that the manuscript is technically sound and its style is rather clear; as a result
its presentation leaves just a few more to be desired.
First of all, from my point of view, the authors are kindly requested to enrich their Introduction
Section but mostly their Modelling Section with adequate references so as to provide the reader with
some fundamentals of Cellular Automata (CAs) computational tool as well as with some CA
pedestrian dynamics models. In specific, based on their expertise, they could also refer to their
previous works with CAs so as to provide the potential reader with the preliminary characteristics of
the CAs model when applied to pedestrian dynamics. For example which is the Moore
neighbourhood, how the CA rules apply to the cells and so on. In such a way, to the best of my
knowledge, it would be easier for her/him to follow up the proposed model and moreover, to
appreciate the presented approach.
Moreover, some questions regarding the model presentation and experimental studies are arisen and
should be answered. It is clear from the experimental studies presentation that no acceleration and
breaking time of the pedestrians are taken into account. Does this mean that they are considered
negligible or something else?
Some more details regarding the initialization of the CA grid and the corresponding size of the CA
cell should be also provided in accordance with the statement that ""normal speed" is defined as two
floor tiles per foot". In the view of the foregoing, some info about the detection and tracking
algorithm used for the presented experiments would be also valuable.
Which is the computational burden of the provided model? Some info regarding the computational
complexity of the proposed model as well as the programming language and the computing time
could be possibly provided, if available.
Furthermore, to the best of my knowledge, in correspondence to the NaSch traffic model, an
intriguing addition to the transition rules of the presented CA model would be the following one: if
for some reasons, normal speed persons are "transformed" to slow runners due to some personal
reasons, i.e. speak with their mobile phone, or something else with some small probability then a
new rule could be also applied. Of course, in such a case the characteristics of the under study person,
namely his "hat" in the experimental studies, should be changed accordingly.
Moreover, regarding the quality of the provided figures, I think that in a few cases, like the provided
analysis of figures 6 and 7, could be further enhanced. Finally, as minor comments, a few
grammatical, syntax and typographical errors exist and should be appropriately taken good care as
follows. For example, across the main text, only right quotation marks are used in every case, like in
lines 37 "Social Force model" and 46 "Floor Field Model" of page 5 of the submitted pdf file, in line
77 of page 6 "Walk as normal", etc. Moreover, some sentences need to be slightly rephrased like the
ones found in line 182, in page 13 of the submitted pdf: "Thus in any case that the person "fight" for
the same cell will be depends on the number of the persons who fight for the call and their
corresponding transition parameters" and in line 221, in page 16: "Since the nature of the stochastic
CA, number of simulation trials has carried out until 99% convergence of the probability densities."
From my point of view, in Figure 3 caption, the "th" should be placed as superscript text just right
next to the corresponding number.
#####################
Reviewer #2:
The authors have focused on the overtaking phenomenon in pedestrian dynamics. They performed
experiment with real pedestrians and also developed a cellular automaton model. Their simulation
reproduces the result of their experiment well.
Up to the reviewer's knowledge, overtaking phenomenon has been seldom focused on in detail so far,
although it is very essential phenomenon in the real world. In the paper, the result of three initial
conditions, which are very interesting, are clearly compared.
However, there are several unclear points for the reviewer; therefore, the review would like to
suggest revising them and improving the quality of the paper.
[Major Comments]
p.2, l.15
The definition of the aging rate (maybe definition of the elderly person and young person) should be
described.
p.10, Eq. (1)
The reviewer thinks that n_{i-1,j}^t in the first line of the Eq. (1) should be replaced by m_{i-1,j}^t.
Furthermore, a term which represents the situation that the slow pedestrian at cell (i,j) cannot move
forward:
m_{i,j}^t * { (1-P_s) (1- n_{i+1,j}^t + m_{i+1,j}^t) + n_{i+1,j}^t + m_{i+1,j}^t}
is missing.
The authors can revise it; however, the reviewer would like to suggest replacing Eq. (1) by the
description of the update rules because the CA model is used to perform simulation and no
theoretical analysis is shown in the paper.
If some figures are added with the explanation of the update rules, readability of the paper will be
greatly improved.
p.11, l.180,
The combination of parallel update and random sequence update is not easy to understand. The
authors should add some detailed explanation.
[Minor Comments]
p.3
The reviewer would like to recommend expanding introduction by citing some review articles and
recent papers to explain the state of art more in detail and show the difference between the authors'
study and existing study much more clearly. The following are some examples.
[Review articles]
D. Helbing, Rev. Mod. Phys. 73, 1067 (2001).
T. Nagatani, Rep. Prog. Phys. 65, 1331 (2002).
A. Schadschneider, D. Chowdhury, and K. Nishinari, Stochastic Transport in Complex Systems
(Elsevier, Amsterdam, 2010).
[Recent studies]
Colin M. Henein and Tony White. Macroscopic effects of microscopic forces between agents in
crowd models. Physica A, 373:694, 2007.
Miho Asano, Takamasa Iryo, Masao Kuwahara, Transportation Research Part C, 18, (2010) 842-855
Mohcine Chraibi, Armin Seyfried, and Andreas Schadschneider, Phys. Rev. E, 82, 046111 (2010)
Asja Jelic, Cecile Appert-Rolland, Samuel Lemercier, and Julien Pettre, Phys. Rev. E, 85, 036111
(2012)
Takahiro Ezaki, Daichi Yanagisawa, and Katsuhiro Nishinari, Phys. Rev. E, 86, 026118 (2012)
p.3, l.37, p.5, l.81
Closing double quotation mark should be replaced by opening one.
p.3, l.57
walk -> walking
p.4, l.63
Experimental -> Experiment
p.4, l.70
Japans -> Japanese
p.5, l.88
high -> highly?
p.6, l.116
illustrate -> illustrates
p.6, l.118, p.10, l.149, l.154, p.11, l.175, l.177
overtake -> overtaking
p.6, l.123
corrosion -> collision?
p.8, Figure 6, Figure 7
sped -> speed
p.9, l.138
statistically -> stochastically?
p.9, l.139, "NaSch"
Abbreviation should be avoided.
The following paper should be cited here.
K. Nagel, M. Schreckenberg: J. Phys. I France 2, 2221 (1992)
p.14, l.226
impassible -> impossible?
p.14, l.232
in the situation of slow and normal pedestrians are randomly mixed as scenario 9,
-> slow and normal pedestrians are randomly mixed in scenario 9, ?
#####################
Reviewer #3: This paper is a study in the field of Simulation and it is not in the scope of this journal.
*Highlights (for review)
Click here to download Highlights (for review): Highlight.doc
In coming decade, the aging rate will dramatically increase in advanced countries.
Focus on the mobility issues where the elderly and young pedestrians are mixed.
Cellular Automata model is created with aid of experiments.
The model shows reasonable consistency with the experimental result.
The compatibility of elderly's safety and young's mobility is discussed.
*Manuscript [Word or (La)TeX]
Click here to download Manuscript [Word or (La)TeX]: paper_Revised.docx
Mobility Analysis of the Aged Pedestrians by
Experiment and Simulation
1
2
Kenichiro Shimuraa,b,*, Kazumichi Ohtsukab, Giuseppe Vizzaria, Katsuhiro
Nishinaria, Stefania Bandinib
3
4
5
6
7
8
9
Click here to view linked References
a
Department of Informatics Systems and Communication, The University of Milano
Bicocca, Viale Sarca 336 - U14, 20126 Milano, ITALY.
b
Research Center for Advanced Science and Technology, The University of Tokyo,4-6-1,
Komaba, Meguro-ku, Tokyo, 153-8904, Japan.
Abstract
10
The relative weight of the population shifts from younger to elderly in the most
11
of the region on the planet. Current aging rate in the advanced nations varies
12
from 12% to 13% and is expected to increase up to 21% to 37% in 2050. The
13
increase of aging rate in the society especially in the large city will lead a
14
mobility problem. From a social quality point of view, it is important to achieve
15
the compatibility between safety and mobility respectively for younger and
16
elderly generation. For the purpose of understanding the basic characteristics of
17
the pedestrian dynamics under cohabitation of younger and elderly generation, a
18
Cellular Automata (CA) model is created with the aid of pedestrian experiments.
19
Simulations are carried out to reproduce the experimental results and had shown
20
a good agreement.
21
22
Keywords: aging society, pedestrian analysis, cellular automata
23
2010 MSC: 68Q80,68U20
*Corresponding author
Email address: sh i mu ra@ to ka i .t.u -to kyo .a c .j p (Kenichiro Shimura)
Preprint submitted to Pattern Recognition Letters
24
1. Introduction
25
The world is aging. The aging rate on the planet is in the increasing trend as
26
a result of decreasing birth rate and increasing life expectancy in advanced
27
nations. The aging rate is defined as the ratio between the elderly populations
28
over 65 years old against of the younger populations and is shifting toward the
29
elderly side. According to WHO report, current aging rate in the advanced
30
nations varies from 12% to 13% and is expected to increase up to 21% to 37% in
31
2050. The rapid change in the aging rate is forcing society change into a more
32
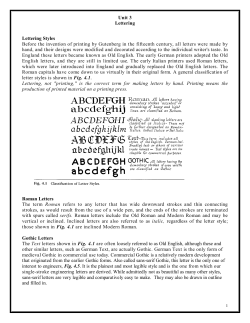
elderly oriented. As well as creating specific welfare services, transportations,
33
impediments removal, the safety issues of elderly generation in public areas
34
would appear to be an important topic. Elderly generations often face to
35
progressive deterioration of physiological and psychological functions which
36
causes slowdown in cognition, reaction and action speed. And health
37
impediments are attributable compare to the younger generations and such health
38
impediments become more frequent as age increases. Such physiological and
39
psychological deterioration affect in the walking speed, endurances and
40
sensitivities. According the review report on behavior and characteristics of older
41
pedestrians by the Department of Transport in U.K. (Dunbar, 2004), the average
42
walking speed of the elderly is about 75% of the younger generations. The
43
increase of the elderly people in the society makes a large change in the social
44
mobility. Considering in the public place, when the elderly people and young
45
people shares the same space, it is foreseen that there would be a major change
46
in the macroscopic pedestrian dynamics. This study focuses on such mobility
2
47
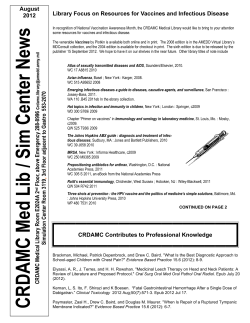
issues in the public space where the pedestrians with different characteristics are
48
mixed. Extensive studies on pedestrian modeling have been made in recent years
49
and they are classified into two main streams such as continuum and discrete
50
model. The “Social Force model” is the one of the successful approaches in the
51
continuum system introduced by Helbing and Molnar (1995). The model
52
describes the pedestrian’s velocity in terms of the collision avoidance mechanism
53
by considering the repulsive force between each pedestrian and is well studied in
54
Helbing et al. (2000) and Helbing (2001). One of the important factors in this
55
approach is the expression of the interaction force where Chraibi and Seyfried
56
(2010) introduces generalized centrifugal-force model to satisfy the collision
57
avoidance by means of excluded volume effect.
58
On the other hand, Cellular Automata (CA) is defined in a discrete lattice
59
and time. CA is defined by update rules such that the state of the current cell
60
changes according to the states of surrounding cells in discrete time step. For
61
pedestrian simulation, the state of a cell is either 0 or 1 to express the existence
62
of a pedestrian in a regular spatial grid. Then the dynamics is defined by
63
interaction between a cell of interest and the neighborhood cells. There are two
64
types of neighborhood selection namely as “Von Neumann neighborhood” and
65
“Moore neighborhood”. The former considers the surrounding four cells
66
orthogonal to the current cell while the latter considers all of surrounding eight
67
cells. The application of CA to hydrodynamics referred to as Lattice Gas
68
Automaton (LGA) is discussed in Wolfram (1994) and then the extended study
69
for pedestrian simulation is implemented by Helbing (2003). Although LGA
3
70
model is based on the random walk, in order to give a characteristic behavior,
71
biased random walk is implemented by Nagatani (2002). Further, based on
72
Nagatani’s model, Jiang (2006) performed a simulation on pedestrian interaction
73
between the large object. Besides the application of hydrodynamics model to
74
pedestrian simulation, Derrida at al. (1993) made a theoretical study on one
75
dimensional Asymmetical Simple Exclusion Process (ASEP) which plays a
76
fundamental role in traffic models. ASEP is a simple binary CA in open
77
boundary such that a particle moves one cell forward if the cell in front is
78
unoccupied which is relating to the Rule 184 in elementary CA studied by
79
Wolfram (1994). In this way, the excluded volume effect is implemented in
80
relatively simple manner. Nagel (1992) introduced a model which allows a
81
particle to move more than one cell at a time often referred to as
82
Nagel-Schreckenberg model (NaSch model). Thus, the homogeneity of the
83
velocity in ASEP is solved to demonstrate the acceleration and deceleration of
84
particles in discrete expression. Although NaSch model is designed to model the
85
traffic on the highway, Kirchner et al. (2004) applied this model to two
86
dimensional pedestrian interactions such as lane change and bottleneck in egress
87
behavior. For more general applications to give characteristic behavior to
88
pedestrian simulation, Floor Field (FF) Model is introduced and applied to
89
analyze variety of pedestrian phenomena (Burstedde et al. 2001; Kirchner and
90
Schadschneider 2002; Kirchner et al. 2003). FF is predefined geometrical
91
information statically or dynamically given to each cell to give the behavioral
92
characteristics. FF is widely applied for various applications such as egress and
4
93
counter flow behaviors. Henein (2007) uses FF for agent based egress model
94
while Yanagisawa (2007) made a theoretical study on CA model for pedestrian
95
behavior at the exit of the room during egress behavior. Eezaki (2012) further
96
extended the study for multiple bottleneck case and shown the existence of
97
symmetry braking on the pedestrian flow. Based on these studies, the general
98
issue is to determine the volume exclusion for each pedestrian for improving the
99
model to fit the realistic situations. While these referred studies consider the
100
excluded volume in the same size as a single pedestrian, more complex
101
interaction occurs when number of pedestrians is increased and the effects of the
102
volume exclusion become significant. For real world applications, personal space
103
and headway distance should also be considered. These extra spaces can be
104
considered as part of the excluded volume. Jelić et al. (2012) performed
105
experiments to show the spatial effect of headway distance greatly affects the
106
pedestrian velocity. In addition of such spatial effect, negotiation process also
107
occurs at pedestrian interaction e.g. give way to another pedestrian to avoid
108
collision. Asano et al. (2010) studied tactical model by implementing pedestrian
109
eyesight and game theory. Among numerous studies on pedestrian modeling,
110
those which deal with heterogeneity of the walking speed and overtaking
111
behavior are rare. Firstly, for different walking speed, other than NaSch model, a
112
method of applying the different update intervals defined by the speed ratio is
113
studied by Weng (2006). But the application of the models is limited to specific
114
variations of speed in the system. When there is wide variation in walking speed,
115
more flexible expression is necessary. Thus we have chosen to implement
5
116
walking speed by values of transition probabilities. On the other hand, the
117
conventional implementation of overtaking behavior in CA is often carried out
118
by as a simple lane change such that, a particle directly moves to the adjacent
119
cells which are perpendicular to the walking direction if the cell in front is
120
occupied. The description of this particle motion in real pedestrian follows that,
121
the walking pedestrian quickly slides into a position where directly left or right
122
of his current position if there is someone in front. But the fact is that, the
123
pedestrian has a momentum thus he moves into a position where diagonally in
124
front. One of the aims for this paper is to clarify the necessary mobility for this
125
movement. Throughout this paper, the study is carried out through experiments,
126
modeling and simulations to supports the consistency of the model.
127
128
2. Experiment
129
In order to obtain the basic characteristics of pedestrian's motion when two
130
different speed walkers are cohabitated, we have performed series of the
131
following experiments. In these experiments, we are especially interested in the
132
overtaking phenomenon and the emergent formation after overtaking. Fig. 1
133
illustrates the experimental arrangements. The experiment is held in Research
134
Center for Advanced Science and Technology (RCAST), The University of
135
Tokyo. First we prepare 25 healthy young Japanese persons (no distinguish
136
between male and female) and make them aligned in 5x5 matrix formation,
137
asking them to start walking unidirectional to the right direction at once with the
138
starting command. The total length of the experimental lane is 17m and an
6
139
experimental run ends when everyone crosses the goal line. Three video cameras
140
are set at the starting, middle and the goal, where the positions referred to as
141
Video 1, 2 and 3 in Fig. 1 respectively. The control of walking speed is by
142
informing them as “Walk as normal” and “Walk with 75% speed of the normal”.
143
Although male and female has different walk speed due to their physical
144
characteristics, for the purpose of obtaining the quantitative data, the pedestrians
145
are informed to walk along with the floor tiles where the "normal speed" is
146
defined as two floor tiles per foot step thus the participants can maintain the
147
constant speed. Moreover the floor tiles are used to obtain the quantitative data
148
for the post-processing of the videos. The normal walkers ware white cap and the
149
slow walkers ware red cap. The initial formations of the pedestrians are shown in
150
Fig. 2. It is trivial that there are no overtaking action and interaction between the
151
slow and normal speed walkers if the slow walkers are arranged behind the
152
normal walkers. Thus we made three initial configurations for of slow walkers at
153
the front part with various formations. Fig. 2(a) and (b) are the low-density
154
arrangement. Fig. 2(c) illustrates the relatively high-density arrangement where
155
the slow walkers act as a bottleneck to the normal walkers behind. During the
156
experiments, the normal walkers overtake the slow walkers so we can observe
157
the overtaking phenomenon. Two runs are taken for each experimental condition.
158
Fig. 3, 4 and 5 illustrate the captured image with corresponding pedestrian
159
formation of the video for experiment 1, 2 and 3 respectively. The frame number
160
superimposed in the picture shows the elapsed video frames from the start. The
161
frame rate is 29.97 frames per seconds (fps). Thus the time step for each
7
162
consecutive frame is 0.033 sec. The pedestrian formation of normal walkers is
163
observed from Fig. 3, 4 and 5. For the experiment 1, the formation after over
164
taking as seen from Fig. 3 is that, three pedestrians with a space in between
165
aligned vertically. Although some jitters in their positions are seen but the
166
alignment remains for alternative columns. For the experiment 2, it is seen from
167
Fig. 4 that three pedestrians are vertically aligned with no space in between for
168
first several columns. And thereafter, the number of the pedestrian in the vertical
169
alignment reduces to two with more space in between. As shown in Fig. 2, the
170
initial space in between the slow walkers is set just enough for three pedestrians
171
to pass through. This initial arrangement causes the vertical alignment of three
172
pedestrians in the front part of the line as seen in experiment 1 and 2. On the
173
other hand, for experiment 3, the space for the normal walkers to overtake the
174
slow ones is as narrow as for one single person to pass through. Since then, the
175
formation after overtaking appears as a single horizontal line. For all the cases,
176
first several columns after overtaking have the same structure as the first front
177
column of the initial formation. This is because of there is less interaction
178
between each of the normal pedestrians in the front regions. Then the initial
179
formation breaks as more pedestrians pass through the slow ones because there
180
are more interactions between normal walkers before overtaking the slow
181
pedestrians. Furthermore we focused on the overtaking phenomenon. Fig. 6
182
illustrates the steps of a normal walker overtakes a slow walker. It is seen from
183
Fig. 6 that the normal walker tries overtaking when a slow walker is just in front
184
of him. The actual overtake action is taken when consecutive spaces is available
8
185
at perpendicularly beside and the diagonally in front. Similarly to this, the
186
normal speed walkers also have possibility to overtake other normal speed
187
walkers as seen from Fig. 7. The necessity of the consecutive space for
188
overtaking can be considered as result of securing enough mobility to avid
189
collision while lane-change. Such behavior is often seen in the real life at the
190
pedestrian crossing, sidewalk, stations, etc.
191
192
Figure 1: The experiment arrangement.
193
194
195
196
Figure 2: The initial formations for high and low density slow walkers at the front respectively
for experiment (a), (b) and (c).
197
198
199
200
201
Figure 3: The video capture and the corresponding pedestrian formation of the experiment 1 at
55th and 96th frame after the start which shows the emergent formation. The elapsed time between
the two frames is 1.37 sec.
9
202
203
204
Figure 4: The video capture and the corresponding pedestrian formation of the experiment 2.
Where the frame 139 shows the emergent formation.
205
206
207
208
Figure 5: The video capture and the corresponding pedestrian formation of the experiment 3.
Where the frame 153 shows the emergent formation.
209
210
211
Figure 6: Normal sped pedestrian overtaking the slow speed pedestrian.
212
213
214
Figure 7: Normal sped pedestrian overtaking the normal speed pedestrian.
10
215
3. Modeling
216
A CA based pedestrian model is constructed based on the experimental
217
observations. This approach is characterized by discrete time and space. A
218
pedestrian is considered as particles move in a given lattice so called cellular
219
space. The motion of a particle is defined by certain transition rules which
220
describe the local interaction of cells. The state of the cell of interest is updated
221
according to the states of surrounding cells by some probability so called
222
transition probability. In the model, each cell has occupied and unoccupied states
223
where the maximum occupation number is one. The exclusivity rules such that
224
only one particle can occupy one cell must be strictly applied. For each update
225
step, the whole lattice is scanned and the transition rules are locally applied with
226
the corresponding transition probability. The major effect of introducing the
227
transition probability here is that to represent the different walking speed of the
228
pedestrians as well as for the frequency of overtaking. Then the walking speed of
229
the pedestrians are stochastically expressed, while NaSch traffic model expresses
230
deterministically by controlling the number of cells to be moved in each
231
calculation step. However, the implementation of the walking speed into the
232
model is achieved by the relative speed concept. Considering to the speed of the
233
normal pedestrians is unity then the speed of the slow walkers is expressed as its
234
ratio. We consider a 3x3 Moore neighborhood where a cell is updated according
235
to the states of all eight surrounding cells. Fig. 8 shows the transition rules of the
236
model. The figure represents the possibilities of a particle moving into the center
237
cell referred to as i, j with corresponding probabilities. Where PN and PS
11
238
represent the probability that Normal and Slow speed pedestrian respectively,
239
move one cell forward. Further, we introduce the probability PO for overtaking
240
which represent the decision of the pedestrian either he or she overtakes others
241
and it can be evaluated by counting the ratio of pedestrians proceed overtaking
242
against whole pedestrians. In this case, for the overtaking probability PO, only
243
normal pedestrians try overtaking others when the site in front is occupied. Then
244
the successful overtaking is expressed by probability product of POPN. Together
245
with these transition probabilities, the geometrical condition needs to be satisfied
246
as shown in the figure.
247
248
1
2
PoPN
PoPN
i
i,j
j
PN
(a)
1
2
PoPN
(b)
(c)
PoPN
(d)
= Vacant Site
= Normal Speed
= Slow Speed
PS
Stop
249
250
(e)
(f)
=
or
=
or
Stop
(g)
Figure 8: The transition rules and the corresponding transition probabilities.
251
252
253
12
254
Fig. 8(a) and (f) shows the basic rule of Normal and Slow pedestrian move
255
forward and Fig. 8(e) and (g) shows those pedestrians don’t move due to the
256
destination cell is occupied. These four rules represent the unidirectional (right to
257
left) motion of normal and slow pedestrians which follows to the single lane
258
ASEP. For the overtaking process, the rules are chosen to conserve the
259
consistency between the experimental results. Fig. 8(b), (c) and (d) show the
260
rules for overtaking behavior where the normal speed pedestrian need to have
261
consecutive space at beside and diagonally in front as referred to Fig. 6 and 7.
262
Fig. 8(b) and (c) is symmetrical arrangement that only one pedestrian tries
263
moving into the center cell. Fig. 8(d) is the situation that two pedestrians fight
264
for center cell. We are not considering any negotiation in this case thus the
265
probability for successful overtake for the one is halved. In this way, the
266
transition rule expresses the following three motions such that moving forward,
267
the volume exclusion and the overtaking.
268
The time evolution of the lattice is calculated by particle oriented shuffled
269
update method. Every cell in the lattice is updated once in every calculation step
270
but the sequence of cell selection is by shuffled order. The Normal pedestrian
271
cells are updated at every iteration because PN = 1, but Slow pedestrian cells are
272
only updated by some chance according to the value of PS. The pseudo code of
273
the update algorithm is as follows;
274
275
276
277
278
WHILE simulation
IF random number <= PS THEN
TRANSIT Normal and Slow pedestrian, using local values of PN = 1, PS = 1, PO = PO
ELSEIF PS < random number <= PN THEN
13
279
280
281
282
283
TRANSIT only Normal pedestrian, using local values of PN = 1, PO = PO
ELSE
TRANSIT none
ENDIF
ENDWHILE
284
285
Where the function of “TRANSIT” means that letting all the relevant transition
286
rules are applied with locally specified probabilities. The reason for using
287
shuffled update is to avoid the pseudo dynamics which occurs when sequential
288
update is used. And also the site oriented procedure prevents the time dependent
289
spatial dispersion of the particles, those who have the same transition provability
290
less than unity. In the case if there are two particles with PS in one dimensional
291
lattice, the deviation of the distance between these two particles becomes larger
292
as time evolves due to the stochastic nature. This causes the breakdown on the
293
initial formation of Normal and Slow pedestrian. From the observation of the
294
experimental result, the initial formation of Slow pedestrian is maintained for
295
while after starting. We are specially looking at the interaction between Normal
296
and Slow pedestrians. Thus this implementation can exclusively provide the
297
distance between two groups under different speed.
298
Toward the simulation, the value of PN and PS need to be set. According to
299
the observed statistical data, Dunbar (2004) shows the average walking speed of
300
the youth is 1.51 m/s and the elderly is 1.14 m/s where the speed ratio is 0.75.
301
Thus we choose the transition probability of normal speed walkers PN is set to 1
302
and that of the slow walkers PS is set to 0.75. Considering the size of each cell as
303
40cm x 40 cm, then a calculation step is equivalent to about 0.25 sec for
14
304
matching the speed. For evaluation of overtaking process, the normal pedestrians
305
try overtaking whenever the cell in front of him is occupied. Thus the provability
306
of successful overtaking POPN is set to 1. But the succession of overtake depends
307
on the occupation conditions of surrounding cells.
308
309
4. Results and discussions
310
The simulations are carried out for the same initial pedestrian's formation as
311
those for experiment 1, 2 and 3 where the results are shown in Fig. 9 (a), (b) and
312
(c) respectively. Each figure illustrates the pedestrian formation in the region of
313
interest at certain calculation step as specified in the figure. The CA model stated
314
in Fig. 8 is the stochastic process, thus Fig. 9 shows results of a single simulation
315
trial. Besides, some deviations can be seen for every simulation trials but the
316
main characteristics of the pedestrian formation are conserved. Fig. 9(a)
317
corresponds to the experiment 1 where the experimental result is shown in Fig. 3.
318
The simulation result shows that, the formation of the normal speed pedestrians
319
after overtaking is similar to that observed in the experiment in which, at the
320
alternative column, three pedestrians are aligned vertically with a space in
321
between. Secondly, the simulation result shown in Fig. 9(b) corresponds to the
322
experiment 2 shown in Fig. 4. The final pedestrian formation of normal speed
323
pedestrians are also vertical alignment for alternative columns. First few lines
324
have three pedestrians with no space in between and then it becomes two
325
pedestrian per column with a single space in between. This phase change in the
326
formation is due to the interaction between the slow pedestrians. The
15
327
intermediate formation at step 14 in Fig. 9(b) illustrates this interaction, where
328
the normal speed pedestrians are overtaking the slow ones and moderate jam is
329
observed behind the slow pedestrians. For Fig. 9 (c) referred to as experiment 3
330
and the experimental result shown in Fig. 5. Due to high density of the slow
331
pedestrians at the front, it is seen that the formation of normal pedestrian is much
332
affected by the slow pedestrians. High impact to the mobility of the normal
333
pedestrians creates the single horizontal alignment. This formation can be also
334
seen by experiment 3 where the result is shown in Fig. 5. The overall result
335
shows that the mobility of the normal speed pedestrians is highly affected by the
336
density of the slow pedestrians as well as its initial formation. In reality for
337
example, pedestrian crossing, sidewalk and stations in urban areas, the mobility
338
of pedestrians will play an important role for the sake of safety and crowd
339
management. This result provides further understandings of the pedestrian
340
dynamics when the elderly and younger people are cohabitating.
341
Furthermore, we have performed simulations for scenarios of various initial
342
formations to calculate the average travel time required for all normal speed
343
pedestrians to overtake the slow ones. Fig. 10 illustrates the calculated results.
344
Since the nature of the stochastic CA, number of simulation trials has repeatedly
345
carried out for the same conditions to obtain the statistically meaningful result.
346
The travel time is counted for each trial and the frequencies of results are
347
statistically resolved by means of probability densities. The calculation is
348
repeated until the probability density leaches to 99% saturation. One of the trivial
349
results is that, the travel time is short when the slow pedestrians are located
16
350
behind the normal pedestrians since there are no overtaking processes. However
351
this kind of arrangement is almost impossible for real world application. More
352
feasible possibility is that, separation of the walking lane for slow and normal
353
pedestrians as shown in scenario 14 in Fig. 10. The travel time of this scenario is
354
minimum among the considered scenarios since there is no interaction between
355
slow and normal speed walkers. The example of such social structure in the real
356
world is a highway that has slow and overtaking lane for cars. Contrary to this, in
357
the situation of slow and normal pedestrians are alternately placed like a
358
checkerboard pattern as scenario 9, which is closer to the real world situation
359
without pedestrian control. It takes more than double amount of time than that
360
for scenario 14. However, the important point to minimize the travel time and
361
maximizing the mobility is to reduce the number of interaction between slow and
362
normal speed pedestrians.
363
364
17
365
366
367
Figure 9: The results simulated for the same initial formation as experiments 1,2 and 3
respectively.
368
369
370
Figure 10: Averaged travel time to overtake slow pedestrians for various initial formations.
18
371
372
5. Conclusion
373
In this paper the pedestrian experiment has carried out for understanding the
374
characteristics of the pedestrians’ mobility when the elderly and the younger are
375
mixed. Further, CA model is created based on the experimental results by means
376
of the interaction between pedestrians with groups of different speed. It is found
377
that the emergent spatial formation is characterized by the initial formation,
378
walking speed and overtaking behavior. During the overtaking process, the
379
slower speed pedestrians are considered as moving obstacles to others acting as a
380
transient bottleneck. Current pedestrian model is in the simplest form but it
381
successfully shows the fundamental phenomena such as the spatial formation
382
and travel time. Simulation results suggest that separation of the walking lane for
383
slow and normal speed pedestrians is one of the solutions for the compatibility
384
issue such as elderly's safety and the non-elderly's mobility since it minimizes
385
their interactions.
386
387
Acknowledgement
388
This work is partially supported by Fondazione CARIPLO within the ALIAS
389
Project. (www.alias.disco.unimib.it).
390
391
392
393
19
394
References
395
Asano, M., Iryo, T., Kuwahara, M., 2010. Microscopic pedestrian simulation
396
model combined with a tactical model for route choice behaviour.
397
Transportation Research Part C 18, 842.
398
Burstedde, C., Klauck, K., Schadschneider, A., Zittartz, J., 2001. Simulation of
399
pedestrian dynamics using a two dimensional cellular automaton. Physica A
400
295, 507.
401
402
Chraibi, M., A. Seyfried, 2010. Generalized centrifugal-force model for
pedestrian dynamics. Phys. Rev. E 82, 046111
403
Derrida, B., Evans, M. R., Hakim, V., Pasquier, V., 1993. Exact solution of a 1D
404
asymmetric exclusion model using a matrix formulation. J. Phys A: Math.
405
Gen. 26, 1493.
406
Dunbar, G., Holland, C., Maylor, E., 2004. Older Pedestrians: A Critical Review
407
of the Literature, Road Safety Research Report No. 37. Department of
408
Transport, London 37.
409
410
411
412
413
Ezaki, T., D., Yanagisawa, K., Nishinari, 2012. Pedestrian flow through multiple
bottlenecks. Phys. Rev. E 86, 026118
Helbing, D., 2001. Traffic and related self-driven many-particle systems. Rev.
Mod. Phys. 73, 1067.
Helbing, D., Farkas, I., Vicsek, T., 2000. Simulating dynamical features of
20
414
415
416
417
418
escape panic. Nature, 407, 487.
Helbing, D., Isobe, M., Nagatani, T., Takimoto, K., 2003. Lattice gas simulation
of experimentally studied evacuation dynamics. Phys. Rev. E 67, 067101.
Helbing, D., Molnar, P., 1995. Social force model for pedestrian dynamics. Phys.
Rev. E 51, 4282.
419
Henein, M. C., White, T., 2007. Macroscopic effects of microscopic forces
420
between agents in crowd models Original Research Article. Physica A 373,
421
694.
422
423
424
425
Jelić, A., Appert-Rolland, C., Lemercier, S., Pettré, J., 2012. Properties of
pedestrians walking in line: Fundamental diagrams. Phys. Rev. E 85, 036111.
Jiang, R., Wu, Q., 2006. The moving behavior of a large object in the crowds in a
narrow channel. Physica A 364, 457.
426
Kirchner, A., Kluepfel, H., Nishinari, K., Schadschneider, A., Schreckenberg, M.,
427
2004. Discretization effects and the influence of walking speed in cellular
428
automata models for pedestrian dynamics. J. Stat. Mech.: Theory Exp. 364,
429
P100011.
430
Kirchner, A., Klüpfel, H., Nishinari, K., Schadschneider, A., Schreckenberg, M.,
431
2003. Simulation of competitive egress behavior: comparison with aircraft
432
evacuation data. Physica A 324, 689.
433
Kirchner, A., Klüpfel H., Nishinari, K., Schadschneider, A., Schreckenberg, M.,
21
434
2004. Discretization effects and the influence of walking speed in cellular
435
automata models for pedestrian dynamics. J. Stat. Mech., P10011.
436
Kirchner, A., Schadschneider, A., 2002. Simulation of evacuation processes
437
using a bionics-inspired cellular automaton model for pedestrian dynamics.
438
Physica A 312, 260.
439
Nagatani, T., 2002, The physics of traffic jams. Rep. Prog. Phys. 65, 1331
440
441
442
Nagel, K., Schreckenberg, M., 1992, A cellular automaton model for freeway
traffic. J. Phys. I France 2, 2221.
443
Weng, W., Chen, T., Yuan, H., Fan, W., 2006. Cellular automaton simulation of
444
pedestrian counter flow with different walk velocities. Phys. Rev. E
445
74,036102.
446
447
448
449
Wolfram, S., 1994. Cellular Automata and Complexity: Collected Papers.
(Addison-Wesley Publishing Company).
Yanagisawa, D., Nishinari, K., 2007. Mean-field theory for pedestrian outflow
through an exit. Phys. Rev. E 76, 061117.
450
451
452
22
Figure
Click here to download high resolution image
Figure
Click here to download high resolution image
Figure
Click here to download high resolution image
Figure
Click here to download high resolution image
Figure
Click here to download high resolution image
Figure
Click here to download high resolution image
Figure
Click here to download high resolution image
Figure
Click here to download high resolution image
Figure
Click here to download Figure: Fig9.eps
(a)
1
Intermediate formation, Step 0.
58
1
Intermediate formation, Step 22.
58
44
Intermediate formation, Step 76.
101
1
Intermediate formation, Step 0.
58
1
Intermediate formation, Step 14.
58
41
Intermediate formation, Step 75.
98
1
Intermediate formation, Step 0.
58
1
Intermediate formation, Step 21.
58
61
Intermediate formation, Step 100.
118
(b)
(c)
Normal speed pedestrian
Slow speed pedestrian
Figure
Click here to download Figure: Fig10.eps
Normalised Travel Time
Averaged Required Travel Time to Overtake Slow Walkers
Initial Formations
1
1
2
3
4
6
7
8
9
5
0.5
11
0
1 2 3 4 5 6 7 8 9 10 11 12 13 14
Scenario Number
12
13
14
Scenario Number is stated
underneath of each formation
10
Slow
Normal









© Copyright 2026