
Gaussian Curvature ∗ Yan-Bin Jia Nov 4, 2014
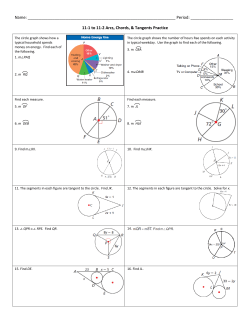
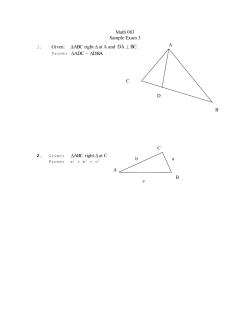
Gaussian Curvature∗ (Com S 477/577 Notes) Yan-Bin Jia Nov 4, 2014 We have learned that the two principal curvatures (and vectors) determine the local shape of a point on a surface. One characterizes the rate of maximum bending of the surface and the tangent direction in which it occurs, while the other characterizes the rate and tangent direction of minimum bending. The rate of surface bending along any tangent direction at the same point is determined by the two principal curvatures according to Euler’s formula. In this lecture, we will first look at how the local shape at a surface point can be approximated using its principal curvatures and direction. Then we will look at how to characterizes the rate of change of a vector defined on a surface with respect to a tangent vector. Our main focus will nevertheless be on two new measures of the curving a surface — its Gaussian and mean curvatures — that turn out to have greater geometrical significance than the principal curvatures. 1 Geometric Interpretation of Principal Curvatures The values of the principal curvatures and vectors at a point p on a surface patch σ tell us about the shape near p. To see this, we apply a rigid motion followed by a reparametrization.1 More specifically, we move the origin to p and let the tangent plane to σ at p be the xy-plane with the x-axis and y-axis along the directions of the two principal vectors, which correspond to principal curvatures κ1 and κ2 , respectively. Furthermore, we let the values of both parameters at the origin be zero, that is, σ(0, 0) = 0. (1) Without any ambiguity, we still denote the new parametrization by σ. Let us determine the function z = z(x, y) that describes the local shape. The unit principal vectors can be expressed in terms of the partial derivatives: (1, 0, 0) = ξ1 σ u + η1 σv , (0, 1, 0) = ξ2 σ u + η2 σv . So can any point (x, y, 0) in the tangent plane: (x, y, 0) = x(1, 0, 0) + y(0, 1, 0) ∗ The material is adapted from the book Elementary Differential Geometry by Andrew Pressley, Springer-Verlag, 2001. 1 The shape does not change under any rigid motion or reparametrization. 1 = x(ξ1 σ u + η1 σ v ) + y(ξ2 σu + η2 σ v ) = sσ u + tσv , (2) where s = xξ1 + yξ2 and t = xη1 + yη2 . (3) Let us evaluate σ(s, t) at the parameter values s and t, applying Taylor’s theorem with higher order terms in s and t neglected: 1 σ(s, t) = σ(0, 0) + sσu + tσv + (s2 σ uu + 2stσuv + t2 σ vv ) 2 1 2 = (x, y, 0) + (s σ uu + 2stσuv + t2 σ vv ), (by (1) and (2)) 2 All derivatives are evaluated at the origin p. Neglecting the second order terms added to x and y, the coordinates of σ(s, t) is (x, y, z), where ˆ z = σ(s, t) · n 1 = (Ls2 + 2M st + N t2 ) 2 s 1 L M (s t) . = M N 2 t Writing z σ ξ1 T1 = η1 p u2 u1 x z = = = y and ξ2 , T2 = η2 we have from (3): s = xT1 + yT2 . t Thus, 1 (xT1 + yT2 )t F2 (xT1 + yT2 ) 2 1 2 x T1 F2 T1 + xy(T1t F2 T2 + T2t F2 T1 ) + y 2 T2t F2 T2 2 1 (κ1 x2 + κ2 y 2 ), 2 since Tit F2 Tj = κi if i = j or 0 otherwise. Hence the shape of a surface near the point p has a quadratic approximation determined by its principal curvature κ1 and κ2 . It is an elliptic paraboloid described by the equation z = 12 (κ1 x2 + κ2 y 2 ). 2 Covariant Derivative ˆ to represent a function that assigns to every point p on the surface We slightly abuse the notation n ˆ (p) at the point. Since n ˆ is continuous, it is a vector field on S, and referred to as S the normal n 2 the normal vector field. Similary, ˆt1 and ˆt2 are also vector fields on S that continuously assign to every point two orthogonal principal vectors. At the point p, a vector field Z typically changes differently in different tangential directions. The rate of change along a tangent w is charaterzied by its covariant derivative along w. More specifically, we let α(t) be a curve on S that has initial velocity α′ (0) = w. Consider restriction of Z to α. Then, the covariant derivative of Z with respect to w is defined to be dZ(α(t)) ∇w Z = . dt t=0 In particular, consider the u-curve α(u) = σ(u, v0 ) passing through p = σ(u0 , v0 ) at velocity w = σ u (u0 , v0 ). We have dZ(α(u)) du u=u0 dZ(σ(u, v0 )) = du u=u0 = Zu (u0 , v0 ). ∇w Z = Reparametrize α(u) as a unit-speed curve β(s). Clearly, ds (0) = kα′ (u0 )k = kσ u (u0 , v0 )k. du ˆ = β ′ (0) = σ u (u0 , v0 )/kσ u (u0 , v0 )k. The covariant derivative with respect to the unit At p, let x ˆ is vector x dZ(β(s)) ∇xˆ Z = ds s=0 dZ(α(u(s)))/du = ds/du u=u0 Zu (u0 , v0 ) . = kσ u (u0 , v0 )k In the Darboux frame T -V -U at p of a surface curve, where T is the curve tangent, U the ˆ . Then U ′ is the surface normal, and V = U × T , it holds that U ′ = −κn T − τg V . Denote T as u ˆ . The normal curvature at p in the direction u ˆ is covariant derivative along u ˆ ·u ˆ. κn (ˆ u) = −U ′ · T = −∇uˆ n This is the definition of the normal curvature in [1, p. 196]. Consequently, the principal curvatures are ˆ · ˆt1 , κ1 = κn (ˆt1 ) = −∇tˆ1 n ˆ · ˆt2 . κ2 = κn (ˆt2 ) = −∇tˆ2 n ˆ · ˆtj = 0 if i 6= j. It can be shown that −∇tˆi n 3 3 Gaussian and Mean Curvatures Let κ1 and κ2 be the principal curvatures of a surface patch σ(u, v). The Gaussian curvature of σ is K = κ1 κ2 , and its mean curvature is 1 H = (κ1 + κ2 ). 2 To compute K and H, we use the first and second fundamental forms of the surface: Edu2 + 2F dudv + Gdv 2 Again, we adopt the matrix notation: E F F1 = F G and Ldu2 + 2M dudv + N dv 2 . and F2 = L M M N . By definition, the principal curvatures are the eigenvalues of F1−1 F2 . Hence the determinant of this matrix is the product κ1 κ2 , i.e., the Gaussian curvature K. So K = det(F1 −1 F2 ) = det(F1 )−1 det(F2 ) = LN − M 2 .. EG − F 2 (4) The trace of the matrix is the sum of its eigenvalues, thus, twice the mean curvature H. After some calculation, we obtain 1 1 LG − 2M F + N E H = trace(F1 −1 F2 ) = . 2 2 EG − F 2 (5) An equivalent way to obtain K and H uses the fact that the principal curvatures are also the roots of det(F2 − κF1 ) = 0, which expands into a quadratic equation (EG − F 2 )κ2 − (LG − 2M F + N E)κ + LN − M 2 = 0. The product K and the sum 2H of the two roots, can be determined directly from the coefficients. The results are the same as in (4) and (5). Conversely, given the Gaussian and mean curvatures K and H, we can easily find the principal curvatures κ1 and κ2 , which are the roots of i.e., H ± √ κ2 − 2Hκ + K = 0, H 2 − K. Example 1. We have considered the surface of revolution (see Example 1 in the notes titled “Surface Curvatures”) σ(u, v) = (f (u) cos v, f (u) sin v, g(u)), 4 where we assume, without loss of generality, that f > 0 and f˙2 + g˙ 2 = 1 everywhere. Here a dot denotes d/du. The coefficients of the first and second fundamental forms were determined: E = 1, L = f˙g¨ − f¨g, ˙ G = f 2, F = 0, M = 0, N = f g. ˙ So the Gaussian curvatures is K= (f˙g¨ − f¨g)f ˙ g˙ (f˙g¨ − f¨g) ˙ g˙ LN − M 2 = = . 2 2 EG − F f f Meanwhile, differentiate f˙2 + g˙ 2 = 1: f˙f¨ + g¨ ˙ g = 0. Thus, (f˙g¨ − f¨g) ˙ g˙ So the Gaussian curvature gets simplified to = −f˙2 f¨ − f¨g˙ 2 = −f¨(f˙2 + g˙ 2 ) = −f¨. f¨ K=− . f Example 2. Here we compute the Gaussian and mean curvatures of a Monge patch z = f (x, y). Namely, the patch is described by σ(x, y) = (x, y, f (x, y)). First, we obtain the first and second derivatives: σ x = (1, 0, fx), σ y = (0, 1, fy ), σ xx = (0, 0, fxx), σ xy = (0, 0, fxy ), σ yy = (0, 0, fyy ). Immediately, the coefficients of the first fundamental form are determined E = 1 + fx2 , F = fx fy , G = 1 + fy2 . So is the unit normal to the patch: ˆ= n (−fx , −fy , 1) σx × σy . =q kσ x × σ y k 1 + fx2 + fy2 ˆ we obtain the coefficients of the second fundamental form: With the normal n, L M N fxx ˆ = q = σ xx · n , 1 + fx2 + fy2 fxy ˆ = q = σ xy · n , 1 + fx2 + fy2 fyy ˆ = q = σ yy · n . 1 + fx2 + fy2 Plug the expressions for E, F, G, L, M, N into (4) and (5). A few more steps of symbolic manipulation yield: K = H = 2 fxx fyy − fxy LN − M 2 = , EG − F 2 (1 + fx2 + fy2 )2 1 LG − 2M F + N E 2 EG − F 2 = fxx (1 + fy2 ) − 2fxy fx fy + fyy (1 + fx2 ) . 2(1 + fx2 + fy2 )3/2 5 4 Classification of Surface Points ˆ To see why, suppose The Gaussian curvature is independent of the choice of the unit normal n. ˆ is changed to −n. ˆ Then the signs of the coefficients of L, M, N change, so do the signs of both n principal curvatures κ1 and κ2 , which are the roots of det(F2 − κF1 ). Their product K = κ1 κ2 is unaffected. The mean curvature H = (κ1 + κ2 )/2, nevertheless, has its sign depending on the ˆ. choice of n The sign of K at a point p on a surface S has an important geometric meaning, which is detailed below. 1. K > 0 The principal curvatures κ1 and κ2 have the same sign. The normal curvature κ in any tangent direction t is equal to κ1 cos2 θ + κ2 sin2 θ, where θ is the angle between t and the principal vector corresponding to κ1 . So κ has the same sign as that of κ1 and κ2 . The surface is bending away from its tangent plane in all tangent directions at p. The quadratic approximation of the surface near p is the paraboloid 1 z = (κ1 x2 + κ2 y 2 ). 2 We call p an elliptic point of the surface. 2. K < 0 The principal curvatures κ1 and κ2 have opposite signs at p. The quadratic approximation of the surface near p is a hyperboloid. The point is said to be a hyperbolic point of the surface. 3. K = 0 There are two cases: (a) Only one principal curvature, say, κ1 , is zero. In this case, the quadratic approximation is the cylinder z = 12 κ2 y 2 . The point p is called a parabolic point of the surface. (b) Both principal curvatures are zero. The quadratic approximation is the plane z = 0. The point p is a planar point of the surface. One cannot determine the shape of the surface near p without examining the third or higher order derivatives. For example, a point in the plane and the origin of a monkey saddle z = x3 − 3xy 2 (shown below) are both planar points, but they have quite different shapes. A torus is the surface swept by a circle originally in the yz-plane and centered on the y-axis at a distance greater than its radius from the origin, when the circle revolves about the z-axis. It is 6 a good example which has all three types of points. At points on the outer half of the torus, the torus bends away from from its tangent plane; hence K > 0. At each point on the inner half, the torus bends toward its tangent plane in the horizontal direction, but away from it in the orthogonal direction; hence K < 0. On the two circles, swept respectively by the top and bottom points of the original circle, every point has K = 0. z p p y x A surface S is flat if its Gaussian curvature is zero everywhere. A plane is flat. Let it be the xy-plane with the parametrization (x, y, 0). We can easily show that the plane has zero Gaussian curvature. A circular cylinder, treated in Example 3 of the notes “Surface Curvatures”, has one principal curvature equal to zero and the other equal to the inverse of the radius of its cross section. So a circular cylinder is also flat, even though it is so obviously curved. A surface is minimal provided its mean curvature is zero everywhere. Minimal surfaces have Gaussian curvature K ≤ 0. This is because H = (κ1 + κ2 )/2 = 0 implies κ1 = −κ2 . 5 The Gauss Map ˆ to a surface patch σ measures the ‘direction’ of its tangent plane. The The standard unit normal n ˆ in a tangent direction, i.e., the normal curvature, indicates the degree of variation change rate of n of surface geometry in that direction at the point. To make the notion of change of geometry ˆ per unit area’. independent of any tangent direction, we can measure by the ‘rate of change of n 2 ˆ is a point of the unit sphere S centered at the origin. The Gauss map from a Note that n ˆ (u, v) surface patch σ(u, v) : U → R3 to the unit sphere S 2 sends a point p = σ(u, v) to the point n of S 2 . The Gauss map may be a many-to-one mapping since multiple points on the patch can have the same unit normal. ˆ n(p) ˆ n(p) Gauss map ˆ n(q) ˆ n(q) N(R) p q σ(R) unit sphere 7 ˆ varies over the corresponding region σ(R) Let R ⊆ U be a region. The amount by which n on the surface is measured by the area of the image region N (R) on the unit sphere. The rate of ˆ per unit area is the limit of the ratio of the area AN (R) of N (R) to the area Aσ (R) of change of n the surface region σ(R), as R shrinks to a point. To be more precise, we consider R to be a closed disk of radius δ centered at (u, v) ∈ U . This ratio is AN (R) . δ→0 Aσ (R) lim It can be shown [2, pp. 166–168] that the above ratio is the absolute value of the Gaussian curvature at p, i.e., AN (R) = |K|. lim δ→0 Aσ (R) The integral of the Gaussian curvature K over a surface S, ZZ KdS, S is called the total Gaussian curvature of S. It is the algebraic area of the image of the region on the unit sphere under the Gauss map. Note the use of the word ‘algebraic’ since Gaussian curvature can be either positive or negative, Suppose the patch S = σ(u, v) is defined over the domain [a, b] × [c, d]. Then the total Gaussian curvature is computed as Z dZ b p K(u, v) EG − F 2 dudv. c a Example 3. If the Gaussian curvature K of a surface S is constant, then the total Gaussian curvature is KA(S), where A(S) is the area of the surface. Thus a sphere of radius r has total Gaussian curvature 1 2 r 2 · 4πr = 4π, which is independent of the radius r. Example 4. Without any computation, we can determine that an ellipsoid also has total curvature 4π. The Gauss map is bijective (one-to-one and onto) since every point on the ellipsoid has a distinct normal. The image region covers the unit sphere. Because the Gaussian curvature is everywhere positive on the ellipsoid, the area of the unit sphere, 4π, is the total Gaussian curvature of the ellipsoid. References [1] B. O’Neill. Elementary Differential Geometry. Academic Press, Inc., 1966. [2] A. Pressley. Elementary Differential Geometry. Springer-Verlag London, 2001. 8








© Copyright 2026