
On the hardness of computing the hyperbolicity Nathann Cohen David Coudert Guillaume Ducoffe
COATI Seminars
1/16
On the hardness of computing the hyperbolicity
Nathann Cohen
2
David Coudert
1
Aur´elien Lancin
1
2 LRI,
Guillaume Ducoffe
1
COATI (CNRS, UNS, Inria)
Laboratoire de Recherche en Informatique (Universit´
e Paris-Sud 11)
1
COATI Seminars
2/16
The Metric Structure of a Graph
• graphs in this study: simple, unweighted
• distance = minimum number of edges in a path
• Hyperbolicity ∼ how the metric structure of a graph looks like the
metric structure of a (possibly weighted) tree
−→ tight bounds on the worst (additive) distortion of the distances in a tree
embedding
COATI Seminars
3/16
Examples
• trees are 0-hyperbolic
• cliques are 0-hyperbolic
• cycles of length l are b 4l c-hyperbolic
• n, m-grids are min{n − 1, m − 1}-hyperbolic
COATI Seminars
4/16
Formal definition
Definition (4-points Condition, [Gromov1987])
Let (X , d) be a metric space. For every 4-tuple u, x, v , y of X , we define
δ(u, v , x, y ) as half of the difference between the two largest sums amongst
d(u, v ) + d(x, y ), d(u, x) + d(v , y ), d(u, y ) + d(v , x).
The hyperbolicity of the metric space (X , d), denoted by δ(X , d), is equal to
supu,x,v ,y δ(u, v , x, y ). In particular, the hyperbolicity of a connected graph G ,
simply denoted by δ(G ), is equal to the hyperbolicity δ(V (G ), dG ) of its
shortest-path metric space.
• Other ‘equivalent’ definitions exist (Gromov product, thin triangles, . . . )
COATI Seminars
5/16
Applications
• Routing
greedy routing via hyperbolic embedding [Kleinberg2007]
routing labeling schemes [Chepoi2008]
• Bio-informatics
comparison of phylogenetic networks [Chakerian2010]
• Design of approximation algorithms
ball covering, augmentation problems, [Chepoi2007]
COATI Seminars
6/16
Problem: how to compute the parameter ?
• Needed for:
computation of efficient embeddings [Verbeek2014]
analysis of some applications (e.g., length of the routing paths, etc . . . )
• State of the art
naive method in θ(n4 )-time
(
Exact computation
practical algorithm in O(n4 )-time [Cohen2012]
best-known algorithm in O(n3.69 )-time [Fournier2012]
COATI Seminars
6/16
Problem: how to compute the parameter ?
• Needed for:
computation of efficient embeddings [Verbeek2014]
analysis of some applications (e.g., length of the routing paths, etc . . . )
• State of the art
2-approximation in O(n2.69 )-time [Fournier2012]
(
(max,min)-product
(1 + ε)-approximation in O(ε−1 n3.37 )-time [Duan2014]
(2 + ε)-approximation in O(ε−1 n2.37 )-time [Duan2014]
COATI Seminars
6/16
Problem: how to compute the parameter ?
• Needed for:
computation of efficient embeddings [Verbeek2014]
analysis of some applications (e.g., length of the routing paths, etc . . . )
• State of the art
˜ 2 )-time [Fournier2012]
θ(log n)-approximation in O(n
(
BFS-tree
˜
θ(log2 n)-approximation in O(m)-time
[Dragan2011]
2.37
˜
1569-approximation in O(n )-time [Chalopin2014]
COATI Seminars
7/16
Contribution: Recognition of 12 -hyperbolic graphs
• 0-hyperbolic graphs = block graphs (linear-time recognition)
=⇒ 12 -hyperbolic graphs come next.
• Prior work:
Complete characterization of 12 -hyperbolic graphs [Bandelt2003]
No isometric Cl , l 6= 3, 5;
Close shortest-paths;
Six forbidden (isometric) subgraphs.
COATI Seminars
8/16
Subcubic equivalence
• Theorem [Coudert, Ducoffe 2014]: Recognizing 12 -hyperbolic graphs (in
subcubic-time) is computationally equivalent to detecting induced cycles
of length four in a graph (in subcubic-time).
• Both problems can be solved in O(n3.26 )-time (using fast rectangular matrix
multiplication).
COATI Seminars
9/16
C4 -free detection ∝ 12 -hyperbolic recognition
• Addition of a universal vertex
u
C4 is the only forbidden subgraph
COATI Seminars
1
2 -hyperbolic
10/16
recognition ∝ C4 -free detection
• Quickly excluding long isometric cycles
COATI Seminars
10/16
1
2 -hyperbolic
recognition ∝ C4 -free detection
• Quickly excluding long isometric cycles
Given a c-approximation, denoted by δc (G ):
if δc (G ) > c2 , then G is not 12 -hyperbolic;
else, G does not contain (isometric) cycles with length Ω(c).
COATI Seminars
1
2 -hyperbolic
10/16
recognition ∝ C4 -free detection
• Excluding isometric cycles with length O(c)
COATI Seminars
10/16
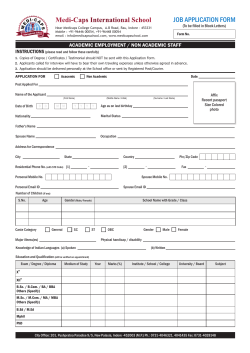
1
2 -hyperbolic
recognition ∝ C4 -free detection
• Excluding isometric cycles with length O(c)
Using graph powers
An edge in G i = a path of length (at most) i in G
if δ(G ) ≤ 21 , then every G i must be C4 -free;
if there exists an isometric Cl , l 6= 3, 5 in G , then G θ(l) is not C4 -free.
u
p
p
y
p
x
u
p
p
v
u
p
y
p
p+1
n= 4p+2
v
n= 4p+1
x
p+1
p
x
y
n= 4p
p+1
p
v
u
p+1
p+1
y
x
p+1
p
n= 4p+3
v
COATI Seminars
1
2 -hyperbolic
10/16
recognition ∝ C4 -free detection
• Checking the other conditions with a modified graph power G [2]
COATI Seminars
1
2 -hyperbolic
10/16
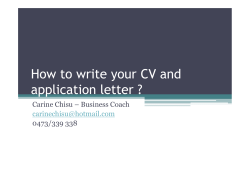
recognition ∝ C4 -free detection
• Checking the other conditions with a modified graph power G [2]
H
H²
H
[2]
H3
COATI Seminars
11/16
Contribution: New preprocessing schemes
• Motivation: computation in large scale graphs (> 10000 nodes)
• Generic scheme:
divide the graph into subgraphs (or metric subspaces);
compute the hyperbolicity for each;
output the maximum value δ ∗ .
=⇒ δ ∗ ≤ δ(G )≤ f (δ ∗ )??
COATI Seminars
12/16
First application: clique-minimal decomposition
• [Tarjan1985] Graph decomposition into atoms a.k.a. subgraphs without a
clique-separator.
[Cohen, Coudert, Ducoffe, Lancin 2014]
=⇒ δ ∗ ≤ δ(G )≤ δ ∗ + 1
=⇒ Exact computation by modifying the atoms (in O(nm)-time)
COATI Seminars
13/16
Extension: tree-decompositions
Adhesion sets = intersection of two adjacent bags
Let DT be the maximum diameter amongst the adhesion sets.
• Proposition [Coudert, Ducoffe 2014]: δ ∗ ≤ δ(G )≤ δ ∗ + 2DT
Particular case: the sets have size ≤ k
• Theorem: In a δ-hyperbolic graph, every minimal k-separator has a
diameter bounded from above by an O(k O(1) · δ).
COATI Seminars
14/16
Contribution: relation with graph symmetries
useful for very large topologies
Theorem:
Let G be a connected finite graph, and σ be a graph endomorphism
of G such that ∀u ∈ V (G ) we have dG (u, σ(u)) ≥ l ≥ 2.
Then it holds that δ(G ) ≥
1
2
· d 2l e.
=⇒ obtained by using game-theoretic characterization from
[Chalopin2014]
applied on a broad range of Server Interconnection Networks (hypercube,
butterflies, fat-trees, etc . . . )
COATI Seminars
15/16
Future works
Implementing the generic preprocessing scheme for experiments
(already done for clique-decomposition)
Recognition of 1-hyperbolic graphs
Computation for planar graphs
COATI Seminars
Questions
16/16







© Copyright 2026