
Baby Orangutan Robot Controller
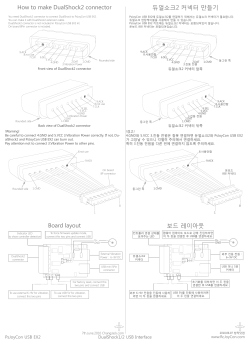
Baby Orangutan Robot Controller Quick-Start Sheet Overview The Pololu Orangutan robot controller is a complete control solution for small robots. The small module includes a powerful Atmel mega48/168 microcontroller, two channels of bidirectional motor control, a potentiometer, eight analog-to-digital channels, and generalpurpose digital I/O lines that can be used to expand the system. A battery, motors, and sensors can be connected directly to the module to create simple robots. Contacting Pololu You can check the Pololu web site at http://www.pololu.com/ for additional information about the Baby Orangutan robot controller, including color pictures, application examples, and troubleshooting tips. We would be delighted to hear from you about your project and about your experience with our product. You can contact us through our online feedback form or by email at [email protected]. Tell us what we did well, what we could improve, what you would like to see in the future, or anything else you would like to say! Programming the Microcontroller The Baby Orangutan is designed to be programmed using a 6-pin in-system programmer such as the AVRISP from Atmel. The six pads at the bottom of the board can be used for this purpose; pin1 is indicated by a small arrow on the printed circuit board. Schematic Diagram The complete schematic for the system is shown on the back of this sheet. The basic schematic is identical to that of the larger Orangutan controller. Connections to a buzzer, LCD, and pushbutton switches should be made as indicated if you want to make a system compatible with the larger Orangutan. Please note that unlike the Orangutan, the resonator pins (PB6 and PB7) are not available for use as generalpurpose I/O. Minimal Connection The Baby Orangutan will run with power applied across the VIN and GND pins. The supply voltage should be 5-10 volts, so a 5- to 8-cell NiCd or NiMH battery pack is a good choice. The reset pin can be brought low to reset the controller, but it can otherwise be left disconnected. Module Pinout and Component Identification VCC M1 M2 PB0 PB3 PB4 PB5 PD0 PD1 PD2 PD3 PD4 PD7 VIN GND M3 M4 PC5 PC4 PC3 PC2 PC1 PC0 ADC6 RST ISP PIN 1 ADC7 Pololu © 2005 Pololu Corporation http://www.pololu.com/ power LED (green) red user LED (on PD1) ATmega48/168 microcontroller 20 MHz resonator voltage regulator dual H-bridge trimmer potentiometer (on ADC7) programming connector ORG02B Pololu 2 4 6 D2 Green ISP header 1 3 5 D1 13 9 PB2 PD6 7 14 8 2 6 PB3 7 8 PB6 VCC VS1 VS2 1 4 11 20 MHz 3 PB7 32 1 2 9 10 11 PD2 PD3 PD4 PD5 PD6 PD7 OUT3 12 OUT4 10 LB1836M GND GND 3 OUT1 Vcont OUT2 5 IN3 IN4 IN1 IN2 U3 1 Y1 12 13 14 15 16 17 PB0 PB1 PB2 PB3 PB4 PB5 U1 LP2981-5.0 3 IN OUT GND PB1 PD5 VCC 0.1 uF C1 1 2 © 2005 Pololu Corporation http://www.pololu.com/ R1 1K VCC PB4 PB5 PC6 GND VIN VBAT 4.7 uF C3 0.1 uF 0.1 uF VCC VBAT Motor2 MO3 MO4 MO1 MO2 Motor1 PC6 C6 C0603 0.1 uF R4 10k VCC PC0 PC1 PC2 PC3 PC4 PC5 ADC6 ADC7 23 24 25 26 27 28 19 22 Inductor Iron 10uH PD1 PD0 PC6 (RESET) 29 PC0 (ADC0) PC1 (ADC1) PC2 (ADC2) PC3 (ADC3) PC4 (ADC4/SDA) PC5 (ADC5/SCL) ADC6 ADC7 PD1 (TXD) PD0 (RXD) 1K R2 L1 VCC PD1 31 30 AVCC 18 20 AREF 6 VCC 4 VCC ATmegaX8-16MC C5 C4 PB6 (XTAL1/TOSC1) PB7 (XTAL2/TOSC2) GND PD2 (INT0) PD3 (INT1) PD4 (XCK/T0) PD5 (T1) PD6 (AIN0) PD7 (AIN1) PB0 (ICP) PB1 (OC1A) PB2 (SS/OC1B) PB3 (MOSI/OC2) PB4 (MISO) PB5 (SCK) U2 0.1 uF C2 VCC R3 10k TRIMPOT VCC D3 Red LCD DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0 E R/W RS Vo VDD Vss PD4 6 PB5 PD7 14 PB4 12 13 PB3 11 10 9 8 1K PD3 5 7 PD2 10k 4 3 2 1 VCC BUZZER 10k 1K PB0 10k 1K ORG02B 10k 1K Recommended LCD, pushbutton, and buzzer connections for Baby Orangutan Baby Orangutan Robot Controller Schematic Diagram 4 21 5 3











© Copyright 2026