
EnviroInfo 2013: Efficient software tools in the renewable energy
EnviroInfo 2013: Environmental Informatics and Renewable Energies
Copyright 2013 Shaker Verlag, Aachen, ISBN: 978-3-8440-1676-5
Efficient software tools in the renewable energy domain:
Maple and MapleSim
Jiří Hřebíček1, Jaroslav Urbánek1,2
Abstract
There are presented efficient software tools Maple and MapleSim for solving technical problems in the renewable
energy domain using mathematics-based modelling. MapleSim represents the simulation environment, which has a
graphical interface for interconnecting system components. The system models are then processed by the Maple
(symbolic computation system) mathematics engine, and finally the differential-algebraic equations describing the
solved systems are simulated numerically to produce and 2-D, 3-D visualise output results. Maple allows users to
quickly focus and reliably solve problems with easy access to over 5000 algorithms and functions developed over 30
years of cutting-edge research and development. In the paper there are presented two solved problems in the renewable energy domain, which are freely downloadable from the web of the Canadian company Maplesoft developing
above software tools.
1.
Introduction
The Canadian company Maplesoft3 has developed simple and friendly used software tools Maple®4 and
MapleSim®5 which reduce the cost and effort of developing high-fidelity models of power generation and
energy storage systems, including gas and steam turbine generator sets; wind, wave, and solar energy systems and batteries.
Maple information technology has been trusted as a cutting edge mathematical and technical tool for
over 30 years. In that time, millions of users from around the world have used and relied on the power of
Maple for their research, testing, analysis, design, teaching, and schoolwork (Gander/Hřebíček 2004),
(Lynch 2009), (Borwein/Skerritt 2011), (Fox 2011), (Hřebíček et al 2011), (Hřebíček 2012).
MapleSim is a modelling environment for creating and simulating complex multidomain physical systems. It allows users to build component diagrams that represent physical systems in a graphical form. Using both symbolic and numeric approaches, MapleSim automatically generates model equations from a
component diagram and runs high-fidelity simulations (Hřebíček 2008), (Hřebíček/Řezáč 2008), (MapleSim 2013), (Cao/Wu 2013).
These software tools reduce model development and analysis time for scientists and researchers; rapidly
create system-level models to simulate the behaviour of the entire system in a single environment for engineers and academicians; take advantage of advanced analysis, visualization, and programming tools to
perform customized analysis and model investigations not possible with other software tools. Users of
these software tools get the fastest auto-generated code for optimization and real-time simulation, includ-
1
Masaryk University, Institute Biostatistics and Analyses, Kamenice 126/3, 62500 Brno, Czech Republic {hrebicek, urbanek}@iba.muni.cz
2
Masaryk University, Research Centre for Toxic Compounds in the Environment, Kamenice 753/5, 62500 Brno, Czech Republic,
[email protected]
3
http://www.maplesoft.com/
4
http://www.maplesoft.com/products/Maple/
5
http://www.maplesoft.com/products/maplesim/
ing hardware-in-the-loop (HIL) and pass their work down the tool-chain through smooth integration with
other tools, including software tools MATLAB®6, Simulink7 and Modelica8.
1.1 MapleSim
We shall discuss solving renewable energy domain problems using MapleSim (release 6.1) as the simulation environment (MapleSim 2013). The MapleSim software allows engineers to use both causal and
acausal modelling paradigms (Hřebíček 2008), (Hřebíček/Řezáč 2008), (Cao/Wu 2013).
Many simulation software tools are restricted to causal (or signal-flow) modelling. In these software
tools, a unidirectional signal, which is essentially a time-varying number, flows into a block. The block
then performs a well-defined mathematical operation on the signal and the result flows out of the other
side. This approach is useful for modelling systems that are defined purely by signals that flow in a single
direction, such as control systems and digital filters.
MapleSim enables modelling and simulation of real engineered assemblies, such as motors and powertrains, turbines etc. consisting of a network of inter-acting physical components. They are commonly
modelled in MapleSim by block diagrams. The lines connecting two blocks indicate that they are coupled
by physical laws (MapleSim 2013).
The Fig. 1 and Fig. 2 represent two versions of modelling behaviour of the same Double Mass Spring
Damper with two masses M1 and M2 connected to springs k1, k2 and dampers d1, d2 with input strength
F(t) and output mass movements x1(t) and x2(t).
A causal approach of modelling the Double Mass Spring Damper in MapleSim is shown in the Fig. 1.
Figure 1
Causal Modelling Double Mass Spring Damper in MapleSim
Source: Maplesoft
MapleSim provides a broad range of acausal physical components across several physical domains; the
equations that define their behaviour do not have to be derived or entered manually. Users can also create
their own components; these are generated from the differential equations, algebraic expressions, or transfer functions that define the dynamics of the component (Cao/Wu 2013). The MapleSim component library contains over 500 components that its user can use to build different models. All of these compo6
http://www.mathworks.com/products/matlab/
http://www.mathworks.com/products/simulink/
8
https://www.modelica.org/
7
Copyright 2013 Shaker Verlag, Aachen, ISBN: 978-3-8440-1676-5
nents are organized in palettes of the Libraries menu of MapleSim windows, see Fig. 4, according to their
respective domains: electrical, magnetic; hydraulic; 1-D mechanical; multibody; signal blocks and thermal, (MapleSim 2013). Most of these components are based on the Modelica Standard Library 3.1
(Fritzson 2011) and Modelica Standard Library 3.2.
An acausal approach to the same Double Mass Spring Damper model in MapleSim is shown in the Fig.
2.
Figure 2
Acausal Modelling Double Mass Spring Damper
Source: Maplesoft
Figure 3
MapleSim components used in modelling the Double Mass Spring Damper in the Fig. 2
Source: Maplesoft
In the Fig. 3, we can see MapleSim components used for the acausal approach modelling the Double
Mass Spring Damper in the Fig. 2 (MapleSim 2013):
• Fig. 3a) describes a Step component which generates a constant real output, y (in our case F(t)), after a
time offset, t = T0, during a simulation.
• Fig 3b) describes the Translational Force component generates a force proportional to an input signal
f (in our case F(t)). The component equation is fflange = f.
• Fig 3c) describes the Mass component which models sliding mass m (in our case masses M1 and M2)
with inertia and two rigidly connected flanges, without friction. The sliding mass has the length, L,
and the position coordinate, s, is in the middle. A positive force at flangea moves the sliding mass m in
the positive direction. A negative force at flangea moves the sliding mass to the negative direction.
The component equations are:
m · a = fa + fb
Copyright 2013 Shaker Verlag, Aachen, ISBN: 978-3-8440-1676-5
v = ds / dt
a = dv / dt.
sa = s – L/2
•
sb = s + L/2
s(0) = s0.
Fig 3d) describes Translational Spring Damper component which consists of the linear 1-D translational spring and damper components connected in parallel. Its equations are:
f = c · (srel - srel0) + d · vrel
srel = sb - sa
vrel = srel
f = fb
fa + fb = 0
Fig 3e) describes the Translational Fixed component which models a flange of a 1-D translational
mechanical system fixed at position, s0, in the housing. MapleSim user can use this component to connect a compliant element (for example, a spring or damper) between a sliding mass and the housing,
or to fix a rigid element (for example, a mass) at a specific position.
MapleSim allows users to use both causal and acausal approaches. Its user can simulate a physical system (with acausal modelling) together with the associated logic or control loop (with causal modelling) in
a manner that suits either task best (MapleSim 2013). In the Fig. 4, there are two versions of the same
model in Examples menu of MapleSim library (Users´ Guide Example, Chapter 1, Double Mass Spring
Damper). The left diagram uses causal blocks and we can find it in the Signal Blocks palette of the
MapleSim library. The right diagram uses 1-D translational blocks and we can find it in the 1-D Mechanical palette of the MapleSim library in menu on the left hand of the Fig. 4. These diagrams are compatible
with Modelica blocks (Fritzson 2011).
Simulation parameters are set up on the right hand of the Fig. 4.
•
Figure 4
Comparison Models of Double Mass Spring Damper in MapleSim
Source: Maplesoft
MapleSim enables simulation process, where the results are generated and displayed using graphs
showing the quantities of interest and, optionally for multibody mechanical systems, a 3-D animation. To
view the behaviour or response of physical properties (for example displacements, velocity etc.), user can
Copyright 2013 Shaker Verlag, Aachen, ISBN: 978-3-8440-1676-5
add named probes (see Output displacement velocity in the Fig. 2 and Causal Mass1 x, Causal Mass2 x,
Acausal Mass1 x and Acausal Mass2 x in the Fig. 4), to connection lines, ports, or components in solved
2-D or 3-D model. These probes allow identifying the variables of interest that are associated with connection ports.
In the Fig. 5 plots, the positions x2(t) (displacements) of the upper mass M2 (Mass2) in probes Causal
Mass2 x, Acausal Mass2 x and the positions x1(t) (displacement) of the lower mass M1 (Mass1) in probes
Causal Mass1 x, Acausal Mass1 x are shown. They have the same values.
Figure 5
Plots of displacement x1(t) and x2(t) for acausal and causal model of Double Mass Spring Damper
Source: Maplesoft
Causal block-diagram tools only need to solve systems of ordinary differential equations (ODEs), but
acausal modelling introduces a different class of mathematical model: Differential Algebraic Equations
(DAEs) (Ascher/Petzold 1998), (Geletu, 2011). These are systems that include both ODEs and algebraic
equations that are introduced by added physical constraints. Depending on the nature of these constraints,
the DAE problem increases in complexity, usually indicated by an increase in the DAE “index.”
With acausal modelling, each block in MapleSim is a discrete physical component, such as a resistor or
a mechanical joint. Each block contains information about which physical laws it must obey, and two connected components exchange information about which physical quantities (such as energy, current, torque,
heat, and mass flow, etc.) must be conserved (MapleSim2013).
MapleSim is based on the open-standard Modelica modeling language (Fritzson 2011), so MapleSim
users can leverage the growing collection of industry-tested Modelica components in their own projects.
What is more, with Modelica, models and components are open and object-oriented, making them easy to
reuse, customize, share, and extend to suit your exact needs. But MapleSim is more than just Modelica. It
Copyright 2013 Shaker Verlag, Aachen, ISBN: 978-3-8440-1676-5
is consisting of an entire platform for modelling, simulation, and analysis, where Modelica provides the
component and model description only.
The system models of MapleSim are then processed by the Maple (release 17) mathematics engine, and
finally the differential-algebraic equations (DAEs) describing the solved systems is simulated numerically
to produce output data. Scientific computing (Fox 2011), (Gander/Hřebíček 2004) forms the heart of problem solving in mathematics, engineering, and science. To help mathematicians, engineers, scientists and
researchers, Maple offers a vast repository of mathematical algorithms covering a wide range of applications (Borwein/Skerritt 2011).
1.2 Maple
At the core of Maple, the symbolic computation engine is the second to none in terms of scalability and
performance. Indeed, symbolics was the core focus when Maple was first conceived at the University of
Waterloo in 1980 and to this day Maple continues to be the benchmark software for symbolic computing.
Together with a large repository of numeric functionality, including industry-standard libraries such as the
Intel® Math Kernel Library (MKL), Automatically Tuned Linear Algebra Software (ATLAS), and the C
Linear Algebra PACKage (CLAPACK), as well as a broad selection of routines from the Numerical Algorithms Group (NAG®) libraries, users can rely on Maple to support you a across many domains and applications. Using its unique hybrid technology, Maple integrates the symbolic and numeric worlds to solve
diverse problems more efficiently and with higher accuracy (Bernardin et al 2013).
The Maple user interface allows users to harness all this computational power by using context- sensitive menus, task templates, and interactive assistants (Hřebíček 2012). The first steps are intuitively easy
to use and quickly lead users into the captivating, creative, and dynamic world of Maple
(Hřebíček/Chvátalová 2011).
Maple allows users to quickly focus and reliably solve problems with easy access to over 5000 algorithms and functions developed over 30 years of cutting-edge research and development. Using the smart
document environment provided by Maple, you can automatically capture all of your technical knowledge
in an electronic form that combines calculations, explanatory text and math, graphics, images, sound, and
diagrams (Bernardin et al 2013), (Hřebíček 2012).
Maple's user community is now over two million users. Together Maplesoft with Maple users have built
large collections of Maple worksheets and Maple programs, much of which is freely available on the
Maplesoft web for potential users to reuse or learn from. The majority of the mathematical algorithms you
find in Maple today are written in the Maple Programming Language (Bernardin et al 2013). Maple users
can write programs using the same basic tools that the Maple developers themselves use. Moreover you
can easily view most of the code in the Maple library and you can even extend the Maple system, tying
your programs in with existing functionality.
In the paper two models are introduced. They are freely downloadable from the web of Maplesoft´ Application Centre9, Power Generation & Energy Storage10 and MapleSim Model Gallery11.
2.
Solving models in renewable energy domain by MapleSim
MapleSim provides various pre-built templates in the form of Maple worksheets for viewing model equations and performing advanced analysis tasks, such as parameter optimization. To analyse a model and
9
http://www.maplesoft.com/applications/
http://www.maplesoft.com/solutions/engineering/IndustrySolutions/powergen.aspx
11
http://www.maplesoft.com/products/maplesim/ModelGallery/
10
Copyright 2013 Shaker Verlag, Aachen, ISBN: 978-3-8440-1676-5
present its simulation results in an interactive format, its user can use Maple features such as embedded
components, plotting tools, and document creation tools. It is possible also to translate developed models
into C code and work with them in other applications and tools, including applications that allow to perform real-time simulation (MapleSim 2013).
The MapleSim Model Gallery contains engineering models, examples, and demonstrations created using MapleSim. Models are available in a variety of disciplines including Power Industries, see Fig. 6.
Figure 6
MapleSim solved example for Power Industry
Source: Maplesoft
2.1 Wind Turbine Vibrations
The MapleSim Model Gallery for Power industries contains the model of Wind Turbine Vibrations and we
introduce it to present simplicity of using MapleSim.
Let us consider the wind turbine generator system as the only generator unit in utility network where
mechanical stiffness is lower than electrical stiffness or synchronizing torque coefficient. The inertia constants of the wind turbine and generator system have significant effects on the transient stability of the
wind generators and the wind farm.
We simplify a wind turbine generator system to a lumped parameter model of a wind turbine that can
be used to study the vibrations that result due to unbalanced rotors (see simple picture in the Fig. 6). The
percentage difference p between the mass moment of inertia of the blade that causes the imbalance and the
mass moments of inertia of the other two standard blades is one of the parameters that can be varied.
Let us assume the wind turbine tower is fixed in the ground and the nacelle is fixed to tower. Three
blades and rotor will have CAD Geometry components enables 3-D animation of wind turbine. Probe at
nacelle will enables to plot deflections of the rotor.
Copyright 2013 Shaker Verlag, Aachen, ISBN: 978-3-8440-1676-5
All parameters and constants of Wind Turbine Vibrations model are included in downloadable MapleSim file Wind Turbine Vibration.msim12 and MapleSim user can process and modified them. In the Fig. 7 is
presented this MapleSim screen with this model.
Figure 7
MapleSim model of wind turbine vibration
Source: Maplesoft
2.1.1 Description of tower in MapleSim
The tower of the wind turbine consists of Fixed frame component: a stationary frame with a fixed displacement and orientation relative to ground. It is connected to Revolute component, which allowing one
rotational degree of freedom about a given axis (z). A revolute joint, sometimes called a pin or hinge, is
shown in the diagram in Fig. 7 with the two bodies and body-fixed reference frames that it connects. A
revolute joint allows a single relative rotation of the two frames; this joint type prevents all of the other
relative rotations and translations.
Revolute component is connected to the Rigid Body Frame (RBF): a frame with a fixed displacement
and orientation relative to a rigid body Center of Mass (CoM) frame. This body-fixed frame is used to define locations of interest on the body where it is connected (locations where it connects to other bodies:
nacelle and rotor). The position and orientation relative to the center of mass is defined for each bodyfixed frame.
The Cylindrical Geometry (CG) component displays a cylinder in the wind turbine model. The length
of the cylinder is displayed between the points at which the components are connected in the model workspace of MapleSim.
12
http://www.maplesoft.com/products/maplesim/modelgallery/detail.aspx?id=162
Copyright 2013 Shaker Verlag, Aachen, ISBN: 978-3-8440-1676-5
The Rigid Body (RB) component is the Center of Mass (CoM) frame with associated mass and inertia
matrix. It is connected with RBF, CG and Translational Damper Actuator componet.
The Translational Damper Actuator (TDA) component applies stiffness, damping, and actuation between two end frames. These three elements are combined into a single translational spring-damperactuator (TSDA), which is fixed by Fixed Frame.
The probe Deflection (m) z shows the graphic output deflection of wind turbine depending on angular
frequency w of blades (Fig. 8).
Figure 8
Deflection of wind turbine depending on angular frequency w.
Source: Maplesoft
2.1.2 Description of nacelle
The Box Geometry component displays the rectangular prism with two RDF in the nacelle 3-D mode,
which is connected to the tower and rotor.
2.1.3 Description of rotor
The rotor wind turbine is connected to the tower by the RDF component, which is connected to the Revolute component with connected three blades. Each blade is described by the RDF component and the RB
component.
The Revolute component is connected with Rotational Speed component, which forced rotational speed
of a flange. This component generates a forced angular speed at flange according to an input signal. When
the exact parameter is true, the reference velocity is treated exactly. This is only possible if the input signal
is a differentiable function. When the exact parameter is false, the reference velocity is filtered and the derivative of the filtered curve is used to compute the reference acceleration of the flange. This derivative is
not computed by numerical differentiation but by an appropriate realization of the filter.
The Rotational speed component is connected to the Ramp component, which generates a real ramp
signal and the probe Angular frequency (rad/s) w output is the plots of the angular frequency w (rad/s)
generated by Ramp, which we do not present, because it is simple linear function w(t)=c · t (c is constant).
3-D visualization and animation of wind turbine moving enables four CAD Geometry components
which display geometry imported from an .stl file of MapleSim in the 3-D model of the wind turbine,
which shows Playback mode window at the bottom of MapeSim screen, Fig. 7.
Copyright 2013 Shaker Verlag, Aachen, ISBN: 978-3-8440-1676-5
3.
Solving solar cell model with Maple
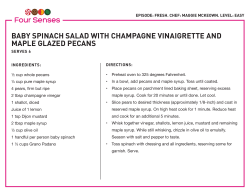
The solar cell is usually represented by the equivalent circuit model shown in the Fig. 11. The corresponding mathematical equation is given by (Aazou/Assaid 2001):
=
−
+
exp
−1 −
(1)
+
is the output current,
is the photocurrent, is the reverse saturation current,
is the
where
output voltage,
is the series resistance, η is the ideality factor,
is the thermal voltage and
is the
shunt conductance ( = 1/ ). Since the accurate knowledge of solar cell parameters is very important
for the design of solar cells device and for estimation of their performance, many papers were published
while presenting different computation methods. The key problem is that the given formula (1) is implicit,
which makes the computation more difficult.
Figure 11
Solar cell circuit model.
Source: (Aazou/Assaid 2011).
Aazou and Assaid (2001) used Maple to determine the real photovoltaic solar cell physical parameters
without any approximation and to study and analyse the effects of each physical parameter on the currentvoltage characteristics and on the output power curve. They presented two methods for extracting the parameter values which originated from the exact analytical solution of (1). This solution is of the following
shape:
=−
exp
+
+
+
+
−
(2)
where =
/ , = 1 + and W denotes the Lambert W function.
We can easily get the solution (2) with Maple, see the Fig. 12. Then, the extraction of parameter values
can be done by minimizing the current error as proposed by Aazou and Assaid (2001). The current error ε
is given by:
= ∑&
"'(
Copyright 2013 Shaker Verlag, Aachen, ISBN: 978-3-8440-1676-5
", $
−
"
%
(3)
where N is the number of the experimental measured data " , " ;
" , $ is the theoretical value of current for the voltage " and P symbolizes the variables which are the five physical parameters utilized to
minimize the current error.
The Maple’s standard Optimization package or a more powerful Maple Global Optimization Toolbox
can be used for this purpose (Bernardin et al 2013).
Figure 12
Solution of equation (1) in Maple 17
Source: Authors
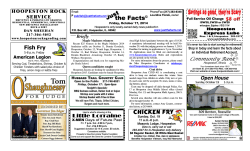
Let us now look on the parameters effect in the I-V characteristics. For this purpose we will use the values obtained by (Ortiz-Conde 2006) who extracted these values also from the solution (2). The parameter
values are summarized in the Table 1.
Table 1
Physical parameters and their values
Source: (Ortiz/Conde 2006)
Parameter
η
We will further use these settings:
q=1.60218*10-19 C.
Copyright 2013 Shaker Verlag, Aachen, ISBN: 978-3-8440-1676-5
Numerical value (unit)
5.07 (mScm-2)
8.59 (Ωcm2)
7.94 (mAcm-2)
13.6 (nAcm-2)
2.31 (–)
= )* +/,, where )* =1.38065*10-23 m2kgs-2K-1, T=300 K,
Let us analyse the effect of η ranging from 1 to 3. As opposed to solving the equation (1) in Maple (see
Fig. 12), we will not use indexes in the names of variables which makes it easier to write. All we have to
do in Maple 17 is to assign parameter values, solve the equation (1) and plot the I-V curve for different
values of η, see Fig. 13.
In Maple 17 we can investigate the effect of several parameters at once in an expression by the means
of the command called Explore. We can see the use of this command to study the effect of all five parameters on the I-V curve in the Fig. 14. Unfortunately we have to copy the whole expression into the Explore command which looks a little bit clumsy.
Figure 13
Investigating the effect of η on the I-V curve in Maple 17
Source: Authors work
4.
Conclusion
We presented software tools Maple and MapleSim for solving two chosen technical problems in the renewable energy domain. We introduce MapleSim simulation environment, which has a graphical interface
for interconnecting modelled system components, which are in compliance with Modelica. The system
models described by MapleSim are then processed by the Maple mathematics engine, and finally the differential-algebraic equations describing the solved systems are simulated numerically to produce and 2-D,
3-D visualise output results. Engineers from around the world use MapleSim to successfully meet the
challenges of complex, modern engineering projects in industries that are adopting MapleSim include:
• Motion control, including robotics and mechatronics, industrial automation, and heavy machinery.
• Vehicle engineering, including powertrain, vehicle dynamics, and hybrid-electric and electric vehicles.
• Power industries including smart grids, power generation and energy storage, and power electronics.
• Aerospace, including aircraft systems, space systems, and guidance, navigation, and control.
• Engineering education and research, including mechatronics, robotics, control, and capstone design
Maple allows users to quickly focus and reliably solve problems with easy access to over 5000 algorithms and functions developed over 30 years of cutting-edge research and development. Maple's user
Copyright 2013 Shaker Verlag, Aachen, ISBN: 978-3-8440-1676-5
community is now over two million users. Together Maplesoft with Maple users have built large collections of Maple worksheets and Maple programs, much of which is freely available on the Maplesoft web
for potential users to reuse or learn from.
Figure 14
Investigating the effect of several parameters on the I-V curve in Maple 17
Source: Authors work
Bibliography
Aazou, S., Assaid, E. M. (2011): Model physical parameters effects on real solar cell characteristics and
power curve, Global Journal of Physical Chemistry, vol. 2
Ascher, U. M., Petzold, L. R. (1998): Computer Methods For Ordinary Differential Equations And Differential-Algebraic Equations, SIAM, Philadelphia
Bernardin, L. (et al) (2013): Maple 17 Programming Guide. Maplesoft, Waterloo. Online
<http://www.maplesoft.com/view.aspx?SF=144531/ProgrammingGuide.pdf>
Borwein, J. M., Skerritt, M. P. (2011): An Introduction to Modern Mathematical Computing with Maple,
Springer, Heidelberg
Cao, J., Wu, T. (2013): Multi-Domain Modeling Simulation and Application Based on MapleSim. Advanced Materials Research, Volumes 706 – 708, pp. 1894-1897
Copyright 2013 Shaker Verlag, Aachen, ISBN: 978-3-8440-1676-5
Dizqah, M. D. (et al) (2013): Acausal Modelling and Dynamic Simulation of the Standalone Wind-Solar
Plant using Modelica, in: Proceeding of the 15th IEEE Int'l Conf. on Modelling and Simulation
(UKSim), Cambridge, UK
Fox, W.P. (2011): Mathematical Modeling with Maple. Brooks Cole
Fritzson, P. (2011): Introduction to Modeling and Simulation of Technical and Physical Systems with
Modelica, Wiley, New York
Gander W., Hřebíček J. (2004): Solving Problems in Scientific Computing Using Maple and Matlab. 4th
expanded and rev. ed., Springer, Heidelberg
Geletu, A. (2011): Introduction to Differential Algebraic Equations, Online <http://www.tuilmenau.de/fileadmin/media/simulation/Lehre/div/Lec_Slides4.pdf>
Hřebíček, J. (2008): Mathematical Modelling with Maple and MapleSim. In Proceedings of 7th International Conference APLIMAT 2008. FME STU Bratislava, Bratislava, pp. 839-852
Hřebíček, J., Řezáč, M. (2008): Modelling with Maple and MapleSim. In: Proceedings of the 22nd European Conference on Modelling nad Simulation ECMS 2008, Digitaldruck Pirrot, Dudweiler, pp. 6066
Hřebíček, J., Chvátalová, Z. (2011): Chosen Features of Maple for Mathematical Modeling in Education
and Practice. Journal of Applied Mathematics 4, pp. 379-393
Hřebíček, J., Pospíšil, Z., Urbánek, J. (2011): Introduction to mathematical modelling with using Maple
(in
Czech).
Masarykova
univerzita,
Brno,
Online
<http://is.muni.cz/do/rect/el/estud/prif/js11/maple/web/mat_model.pdf>
Hřebíček, J. (2012): Mathematical Modeling of Economic Phenomena with Maple. In Ramík J., Stavárek
D. (eds.). Proceedings of 30th International Conference Mathematical Methods in Economics. Silesian University, School of Business Administration, Karviná, pp. 326-331
Hinrichsen, E. N., Nolan, P. J. (1982): Dynamics and stability of wind turbine generators. IEEE Trans.
Power Apparatus System 101, pp. 2640-2651
Jervase, J. A. (et al) (2001): Solar cell parameter extraction using genetic algorithms, Measurement Science and Technology 12, pp. 1922-1925
Lynch, S. (2009): Dynamical Systems with Applications using Maple. Birkhauser/Springer, Heidelberg
MapleSim
(2013):
MapleSim
User's
Guide.
Maplesoft,
Waterloo.
Online
<http://www.maplesoft.com/documentation_center%5Cmaplesim6%5CMapleSimUserGuide.pdf>
Nehaoua, N. (et al) (2011): A New Model for Extracting the Physical Parameters from I-V Curves of Organic and Inorganic Solar Cells, Solar Cells - Silicon Wafer-Based Technologies, In: Tech, Available from: http://www.intechopen.com/books/solar-cells-silicon-wafer-based-technologies/a-newmodel-for-extracting-thephysical-parameters-from-i-v-curves-of-organic-and-inorganic-solar-ce
Okedu, K. E. (2012): Effects of Drive Train Model Parameters on a Variable Speed Wind Turbine. International journal of renewable energy research 2, pp. 92-98
Ortiz-Conde A. (et al) (2006): New method to extract the model parameters of solar cells from the explicit
analytic solutions of their illuminated I–V characteristics. Solar Energy Materials & Solar Cells 90,
pp.
352–361
Online
<
http://iccdcs.eecs.ucf.edu/ICCDCS95/ourpappdf/SEMSC90%282006%29352-361.pdf>
Razak, A. A. (2012): Overview of Wind Turbine Modeling in Modelica Language, IACSIT International
Journal of Engineering and Technology 4, pp. 551-553
Rickert, C. (2012): Object-Oriented Modelling of a Wind Power Plant in Modelica and Analysis of Loads
on Blade Bearings. Master thesis. KTH School of Engineering and Management, Stockholm
Copyright 2013 Shaker Verlag, Aachen, ISBN: 978-3-8440-1676-5







© Copyright 2026