
Optimal flight technique for V-style ski jumping K. Seo*, M. Murakami
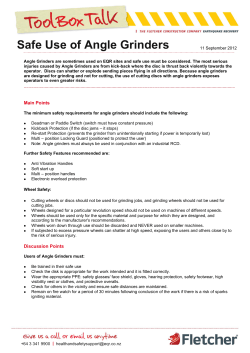
Optimal flight technique for V-style ski jumping K. Seo*, M. Murakami† and K. Yoshida† *Faculty of Education, Yamagata University, Japan † Institute of Engineering Mechanics and Systems, University of Tsukuba, Japan Abstract This paper describes the results of a numerical study to determine the optimal flight technique for V-style ski jumping. We attempt to answer the question of how a jumper should fly in order to increase their flight distance in a V-style posture. The index of performance in this optimization study is the horizontal flight distance, which is mathematically equivalent to the total flight distance, and the control parameters are the ski-opening angle and the angle of forward lean that the jumper employs (the body–ski angle). The flight trajectory is simulated on the basis of an aerodynamic database constructed from wind tunnel test data. It is found that the ski-opening angle should be increased in the first half of the flight, and then maintained at a constant value during the rest of the jump. Optimal control of the ski-opening angle when there is either a headwind or tailwind is also discussed. It is found that the jumper needs to control the skiopening angle over a wider range in the case of a headwind than in the case of a tailwind. The jumper’s skill in controlling the ski-opening angle is very important for increasing the flight distance, especially in the case of a tailwind. Keywords: angle of forward lean, headwind, optimization study, ski jumping, ski-opening angle Introduction There have been several research studies that have looked into optimizing the flight of ski jumpers. A simple optimization study was made (Remizov, 1984) in which the angle of attack was chosen as a control parameter for the cases where the pitching moment was ignored and the two skis were held parallel. Jin et al. (1995) carried out a wind tunnel test using a scale model (at 40%) for three different jumping postures, the parallel style, the V-style and the flat V-style. In VCorrespondence address: Kazuya Seo Faculty of Education, Yamagata University, 1-4-12 Kojirakawa, Yamagata 990-8560, Japan Tel: +81-23-628-4350 Fax +81-23-628-4450 E-mail: [email protected] © 2004 isea Sports Engineering (2004) 7, 00–00 style flight, the angle between the body and the skis was fixed at 30°. The flat V-style was named after the posture in which the body is situated in the plane that also includes the two skis. They pointed out that it was advantageous to adopt the flat V-style in the first half of flight and then to transfer to the V-style during the remainder of the flight. Yoshida (1998) carried out an optimization study on the basis of the aerodynamic data published by Watanabe & Watanabe (1993). The angle of the forward lean was chosen as a control parameter, under conditions where the ski-opening angle was held constant at 36°. They took account of the pitching moment as well as the drag and the lift in the equation system that they used to characterize the flight dynamics. Our study is divided into two parts. We first obtained a body of experimental data to construct an ‘aerodynamic database’, which has already been 1 Optimal flight technique for V-style ski jumping Seo et al. reported in our recent paper (Seo et al., 2004). This second part is devoted to a study in which we attempt to optimize the distance of flight of a ski jumper by utilizing the aerodynamic database. We also intend to demonstrate the practical validity of the database in the present study. The primary objective of this study is to give an answer to the question of how to control the ski-opening angle from the start of the jump to the finish to achieve the longest flight distance. The skiopening angle and the angle of forward lean are controlled to achieve optimization. We also discuss how a jumper should adjust the ski-opening angle in the case of a headwind or tailwind in order to best increase the flight distance. present model, the whole body is assumed to be situated on a single plane, which means that the waist bend angle is zero. The flight path from take-off (t = 0) to a specified time t is given by: X = Y = ∫ ∫ t Uj cos βj dt t Uj sin βj dt If t is equal to the landing time tf, this will give the landing position. The relative velocity Ur and the relative flight angle βr are defined by: Ur = √(Uj cos βj – Uw)2 + (Uj sin βj )2 Uw , β j & β r < 0 X Uw φ βj βr Jumping hill Uj Ur Y Figure 1 Co-ordinate system and definition of angles of βj, βr and φ. U is the velocity of the centre of gravity. The suffixes j, r and w indicate the motion of the jumper with respect to the ground and to air, respectively, and the wind. 2 βr = tan–1 ( Uj sin βj Uj cos βj – Uw ) (3) (4) The equations of motion in the directions parallel and normal to the flight path are expressed respectively by: m mUr δUr = mg sin βr – D δt (5) δβr = mg cos βr – L δt (6) Here, D and L represent the drag and the lift, and m and g are the mass of the body–ski combination and the acceleration due to gravity. The equation of the pitching moment around the center of gravity of the body–ski combination is I δω = M δt Y (2) 0 Basic equations It is assumed that the motion of the body–ski combination occurs in a fixed vertical plane, as shown in Fig. 1. The origin is defined as the take off point, while the X-axis is in the horizontal direction and the Y-axis is in the vertical direction. The velocity of the jumper (the body–ski combination) is expressed by Uj, the wind velocity by Uw, and the relative velocity with respect to the air by Ur . For simplicity, the wind is assumed to blow horizontally. Since a tailwind is defined as a positive wind velocity Uw, Uw in Fig.1 (headwind) is defined as being negative. The flight angles βj and βr are the angles of Uj and Ur, both with respect to the X-axis. The flight angles βj and βr in Fig.1 are also negative. The angle between the plane of the body and the X-axis is expressed by φ. In the (1) 0 ω = δφ δt (7) (8) Here, I is the moment of inertia of the body–ski combination and ω is the angular velocity of the body angle φ. A definition of the characteristic parameters of the body–ski combination is given in Fig. 2. The angle of attack, which is the angle between the skis and the direction of Ur, is defined as α. The ski-opening angle is denoted by λ. The aerodynamic drag, lift and moment in Eqns. (5) through (7) are proportional to Ur2, which were all obtained during wind tunnel tests as functions of α, θ and λ (Seo et al., 2004). The wind Sports Engineering (2004) 7, 00–00 © 2004 isea Seo et al. λ M L φ D θ α mg Uw βj βr Uj Uw , β j & β r < 0 Figure 2 Definition of characteristic parameters. tunnel data were acquired for α at 5° intervals between 0° and 50°, and for θ at intervals of 10° between 0° and 40°, respectively. The ski-opening angle λ was set at one of 0°, 10° and 25°. The torso and legs of the model were always set in a straight line. The tails of the skis were always in contact on the inner edges. The relationship between the four angles (φ, α, βr and θ) can be expressed by Eqn. (9): φ = α + βr + θ (9) Here, βr is negative, as shown in Figs. 1 and 2. Optimization Eqns. (1), (2), (5) through (8) are converted into a system of simultaneous differential equations for the optimization calculation: . x = . x1 . x2 . x3 . x4 . x5 . x6 Uj cos βj Uj sin βj –g sin βr – D/m = (L/M – g cos βr) /Ur ω M/I (10) Here the state variables as a function of time can be given as follows: x = x1 x2 x3 x4 x5 x6 © 2004 isea = X Y Ur βr φ ω Sports Engineering (2004) 7, 00–00 (11) Optimal flight technique for V-style ski jumping It has been reported that initial take-off conditions, such as the take-off speed and the direction of takeoff, can greatly affect the subsequent flight (Bruggemann et al., 2002). However, since there are no experimental aerodynamic data for the high values of θ that correspond to the posture in the initial flight phase immediately after take-off, the calculation must begin at 0.4 s after a take-off in the present computation. It has been reported that it takes about 0.4 s after take-off to transfer to a stable flight regime (Kobayakawa & Kondo, 1985). Therefore, it is assumed that the take-off speed is 25 ms–1 in the direction of the take-off slope, to which is added 2.3 ms–1 due to the jumper’s take-off action at an angle of 35° upward from the direction of the slope at t = 0 s, and that no aerodynamic force acts on the jumper in the gravity field during the initial 0.4 s. By considering ballistic flight in a vacuum for 0.4 s, a set of initial conditions for 0.4 s after take-off can be given for the Okurayama hill at Sapporo, as follows: x(0.4) = 10.7 m – 2.3 m 27.8 ms–1 –16.2 20.0° – 20.0° s–1 (12) The problem of determining optimal control conditions requires that we calculate the time variation of the controlling parameters. The angle of forward lean θ and the ski-opening angle λ were chosen as the control parameters in order to achieve the longest flight distance for a given set of initial values, x1 (0.4) through x6 (0.4). For the landing condition, the height of the jumper should be equal to that of the jumping hill, as given by the expression for the height y between the centre of gravity of the jumper and the jumping hill: ψ = G(x1(tf )) – x2(tf ) = 0 (13) where Y = G(X) is the profile of the Okurayama jumping hill at Sapporo. This landing condition leads to a slightly longer flight distance than occurs in reality because the centre of gravity of the jumper is situated above the landing slope by several tens of centimetres in realistic cases. The index of performance J 3 Optimal flight technique for V-style ski jumping Seo et al. for the maximum flight distance is defined as: J(θ, λ) = –x1(tf ) + 1 c ψ2 2 (14) The goal of the optimization technique is to maximize x1(tf ). In the optimization calculation, J is minimized instead of maximizing x1(tf ). The coefficient c is a penalty coefficient, which is defined as c = 104 in this calculation to assist the numerical optimization technique. If ψ2 is not small, J cannot be minimized because of the large value of c. It should be added that though it is x1(tf ) that is optimized in the computation, the procedure is mathematically equivalent to optimizing the flight distance. A numerical solution is obtained by applying the conjugate gradient method, the details of which appears in the references (Kanoh, 1988). The optimization of the ski-opening angle Angles (°) & Angular velocity (° s –1) The optimal solution of the ski-opening angle λ for the longest flight distance is shown in Fig. 3, as well as other time variations of α, βj, φ and the angular velocity ω. The initial condition is given by Eqn. (12). It is assumed that the angle of forward lean θ is kept at a constant value of 7° under the zero wind condition. The flight distance is about 139 m, which is 8 m longer than that of a fixed posture at λ = 25° and θ = 7°. It is found that a jumper should increase λ in the early stages of the flight phase, and then keep a constant value of around 26°. The angle of attack α weakly oscillates around the trim angle due to the features of the pitching moment data, as mentioned in our previous paper (Seo et al., 2004). Although the skiopening angle λ only varies slightly (except in the early stages), an oscillating variation can be recognized, with peaks that almost correspond with those of α. There is a trough at around 2.6 s and two peaks at around 1.5 s and 3.5 s. It is found that the trough in λ allows the maximum value of α to prevent stalling. On the other hand, λ peaks around the minima of α, resulting in more lift being achieved. It seems that the ski-opening angle λ and the angle of attack α are complementary to each other. It is necessary to have a . negative angular velocity ω(= φ) at the beginning, i.e. a nose-down angular velocity to decrease in φ, in order to make the drag small in the early stages. The body angle φ decreases in the early stages because of the negative value of ω, so α also decreases slightly. The flight trajectory and seven body postures that were identified in the case of the optimized solution are shown in Fig. 4, where the profile of the Okurayama jumping hill is also shown. The body posture is drawn at equal time intervals. The first ski-opening angle is slightly smaller than the others, which are almost independent of time. Fig. 5 shows the time variations of the aerodynamic forces for the optimized solution. The drag area SD is defined as the drag divided by the dynamic pressure 40 30 λ 20 α 10 θ 0 φ –10 ω –20 –30 βj –40 0 1 2 3 Time (s) 4 5 Figure 3 Optimized time variations of angles (α, βj, φ, λ) and the angular velocity ω. The angle of forward lean θ is assumed to maintain a constant value of 7°. 4 Okurayama jumping hill Figure 4 Optimized flight trajectory and body postures through the control of λ in the case of the Okurayama Jumping Hill. Sports Engineering (2004) 7, 00–00 © 2004 isea Seo et al. 0.8 0.06 Optimal flight technique for V-style ski jumping 35 SL 0.04 –1 30 SD 0.4 0.02 λ (°) 0 QM / m3 SD & SL / m 2 0.6 Uw = –1 ms 1 25 QM 0.2 0 0 1 2 3 4 5 0 20 -0.02 15 Time /s Figure 5 Optimized time variations of the drag area SD, the lift area SL and the moment volume QM. The angle of forward lean θ is assumed to maintain a constant value of 7°. 0.5ρUr2. The lift area SL and the moment volume QM are defined in the same manner (Seo et al., 2004). It can be seen that the time variations of SD and SL are similar to that of α. This is because these aerodynamic forces are monotonous functions of α when α is smaller than the stall angle. The lift area SL must be large in the latter half of flight while keeping λ large to achieve longer flight distances. The drag area SD should be small in the early stages to reduce drag. The time variation of α results from the stable pitching oscillation around the trim angle of attack due to the functional form of QM(α), as discussed in our previous paper (Seo et al., 2004). Three optimal control results are shown in Fig. 6 for the ski-opening angle λ under three different wind conditions to determine the effect of wind on the flight distance . The angle of forward lean θ is still assumed to have a constant value of 7°. The optimized flight distance results are about 142, 139 and 138 m for Uw = –1, 0 and 1 ms–1, respectively. The headwind produces a longer flight distance. The differences between the optimized flight distance and that of a fixed posture at λ = 25° and θ = 7° that is not different from the optimized posture are 7, 8 and 11 m, respectively for Uw = –1, 0 and 1 ms–1, as shown in Table 1. The jumper’s skill in controlling the skiopening angle is more important in the case of a tailwind. In the case of a headwind, the jumper should control λ such that it is smaller than in other cases in the first half of the jump in order to make the drag © 2004 isea Sports Engineering (2004) 7, 00–00 0 1 2 3 4 5 Time (s) Figure 6 Optimized time variations of the ski-opening angle λ. The wind speeds of 1, 0 and –1 ms–1 are denoted by Uw = –1, 0 and 1 ms–1, respectively. The angle of forward lean θ is assumed to remain constant at 7°. Table 1 Flight distance comparison. Uw /ms–1 –1 (Headwind) 0 1 (Tailwind) Optimized flight distance /m Flight distance under the condition of a fixed posture (λ = 25° & θ = 7°) /m Difference of the flight distance /m 142 135 7 139 131 8 138 127 11 small, and then make λ large in the second half to produce greater lift. Since the aerodynamic forces are proportional to the square of the relative velocity with respect to air, the largest forces act on the jumper in the case of the headwind. It is necessary for a jumper to control λ over a wider range (about 12°) in the case of a headwind. In the case of a tailwind, λ decreases slightly during a flight, with a control range of λ being just 3°. The optimization of the angle of forward lean Fig. 7 shows the optimal solution of the angle of forward lean θ during the course of a jump, as well as the time variations of α, βj, φ and the angular velocity ω. It is assumed that the ski-opening angle λ is fixed at a constant value of 25° under the zero wind condition. 5 Seo et al. 40 10 30 α 20 λ 9 8 θ ω φ 10 0 θ (°) Angles (°) & Angular velocity (° s –1) Optimal flight technique for V-style ski jumping -10 –1 0 6 –1 -20 5 -30 -40 βj 0 1 2 3 4 5 Time (s) Figure 7 Optimized time variations of angles (α, βj , φ, θ) and of angular velocity ω. The ski-opening angle λ is assumed to remain constant at 25°. It is practically impossible for a jumper to precisely control θ in the flight phase in the manner shown in Fig. 7, because the jumper is connected to the skis by toe bindings at the toe and connecting chords at the heel. The jumper can only adjust the length of the connecting chords at the heels, which determine the minimum θ. The optimum constant value of θ could be found by using this kind of thought process. It is found that a jumper should rapidly decrease the value of θ at the beginning of the jump, and then maintain it at about 6° from 1 s into the jump until the finish. Therefore, the best constant value of θ is about 7° on average. The flight distance is about 132 m, which is 7 m shorter than the result of using an optimized value of λ under the zero wind condition. Therefore, optimizing control of θ is not as effective as optimizing control of λ. Both the angle of forward lean θ and the angle of attack a should be small at the beginning, which both contribute greatly to reducing drag. Although variations in θ are rather small after 1 s into the jump to the finish, the weak peaks of θ seem to almost correspond to those of α, just like the relationship between λ and α that is presented in Fig. 3. Fig. 8 shows the optimized variation of θ for three different wind speeds. Qualitatively there is no major difference in the time variation between these three conditions. In the case of the tailwind, where Uw = 1 ms–1, the jumper should make θ a little bit larger than in the case of a headwind, where Uw = –1. Since the relative velocity with respect to air is smaller 6 Uw =1 ms 7 4 0 1 2 3 Time (s) 4 5 Figure 8 Optimized time variations of the angle of forward lean θ. The ski-opening angle λ is assumed to remain constant at 25°. The headwind of 1 ms–1 is denoted by Uw = –1, the tailwind of 1 ms–1 is denoted by Uw = 1, and the zero wind condition is given by Uw = 0. in the case of a tailwind, it is necessary to make θ larger in order to maximize the lift in the latter half of the jump. Influence of headwind on the flight distance The flight distance data shown in Fig. 9 is obtained by solving Eqn. (10) using the Runge-Kutta method for a fixed posture under the initial condition given by Eqn. (12). Fig. 9 shows the effect of the wind Uw on the flight distance. The angle of forward lean θ and the ski-opening angle λ are assumed to take constant values of θ = 5, 7, 10.5° and λ = 25°, respectively. It can be seen that the stronger headwind yields the longer flight distance for the range of tailwinds, and vice versa. This is because lift is increased in the case of a headwind. The wind speed in a competition is normally less than 4 ms–1. If the wind speed is less than 1 ms–1, which is the typical condition in most competitions, jumpers should adjust the angle of forward lean to about 7°. The flight distance would be about 135 m for Uw = –1, 131 m for Uw = 0, and about 127 m for Uw = 1 in the case of θ = 7°. Therefore, the relative gain (or loss) in flight distance is equivalent to 4 m for a wind speed of –1 (+1) ms–1. This can be summarized by saying that optimization brought about by the jumper’s skill is greater than having a headwind speed of 1 ms–1 to increase the flight distance, as shown in Table 1. There are inflection points in the flight Sports Engineering (2004) 7, 00–00 © 2004 isea Seo et al. Acknowledgements 150 140 Flight distance (m) 130 θ 10.5° 120 110 100 7° 90 Tailwind Headwind 5° 80 70 –5 –4 –3 –2 –1 U 0 w 1 2 3 4 5 (ms –1) Figure 9 Flight distance as a function of wind speed Uw. The angle of forward lean θ and the ski-opening angle λ are assumed to remain constant at θ = 5, 7, 10.5° and λ = 25°, respectively. distance curves at around Uw = 3 for θ = 5° and Uw = 4 for θ = 7°. The reason why the slope of the curve becomes milder for larger tailwind speeds is because a large tailwind pushes the jumper forward, even though the lift becomes smaller. Conclusions From the results of the optimal solution to the question posed in the introduction, we can now summarize the key factors to achieving longer flight during a jump. 1 The ski-opening angle should be smaller in the first half of the jump to reduce drag, and then it should be kept around a constant value in the second half of the jump to maximize lift. 2 In increasing flight distance, optimal control of the ski-opening angle is more important than control of the angle of forward lean. 3 A jumper’s skill in controlling the ski-opening angle is more important in the case of a tailwind than in the case of a headwind. 4 A jumper needs to control λ over a wider range in a headwind. 5 The angle of forward lean should be maintained at around 7° during the flight if the wind speed is less than 1 ms–1. © 2004 isea Optimal flight technique for V-style ski jumping Sports Engineering (2004) 7, 00–00 We would like to thank Prof. Gary A. Williams, Department of Physics and Astronomy, UCLA for fruitful discussions and suggestions. We also would like to thank Kaori Ota, Faculty of Education, Yamagata University, for her support. This work is supported by the Descente and Ishimoto Memorial Foundation for the Promotion of Sports Science and the Ministry of Education, Science, Sports and Culture, Grant-in-Aid for Scientific Research (13750840, 2001 & 15700404, 2003). References Bruggemann, G., et al. (2002) The transition from take-off to early flight phase in ski-jumping. IV World Congress of Biomechanics Proceedings CD. Jin, H., et al. (1995) Desirable gliding style and techniques in ski jumping. Journal of Applied Biomechanics, 11, 460–474. Kanoh, H. (1987) Theory and Computational Method in Optimization. Corona Publishing, Tokyo, Japan (in Japanese) Kobayakawa, M. and Kondo, Y. (1985) The flight mechanics of ski jumping. Science (Japanese edition), 55, 185–190. (in Japanese) Remizov, L.P. (1984) Biomechanics of optimal flight in skijumping. Journal of Biomechanics, 17, 167–171. Seo, K. Watanabe, I. and Murakami,M. (2004) Aerodynamic force data for a V-style ski jumping flight. Submitted for publication in Sports Engineering. Tani, I. and Iuchi, M. (1971) Flight-mechanical investigation of ski jumping. Scientific study of skiing in Japan. Hitachi, 35–52. Watanabe, K. and Watanabe, I. (1993) Aerodynamics of ski-jumping –Effect of ‘V-style’ to distance. Proceedings of the International Society of Biomechanics XIVth Congress, 1452–1453. Yoshida, K. (1998) Investigation of optimal ski jump flight on the basis of aerodynamic data. Masters thesis, Institute of Engineering Mechanics, University of Tsukuba, Japan. 7








© Copyright 2026