
Simple and flexible maps of geospatial data with
C ONTRIBUTED RESEARCH ARTICLE
1
Simple and flexible maps of geospatial
data with mapmisc
Patrick Brown
Abstract The mapmisc package provides functions for visualising geospatial data, including fetching
background map layers, producing colour scales and legends, and adding scale bars and orientation
arrows to plots. Background maps are returned in the coordinate reference system of the dataset
supplied, and inset maps and direction arrows reflect the map projection being plotted. This is a
‘light weight’ package having an emphasis on simplicity and ease of use.
Introduction
R has extensive facilities for managing, manipulating, and visualising spatial data, with the sp (Pebesma
and Bivand, 2005) and raster (Hijmans, 2015) packages providing a set of object classes and core
functions which numerous other packages have built on. It is fairly straightforward to import spatial data of a variety of types and from a range of sources including: images for map backgrounds;
high-resolution pixel grids of surface elevation; and polygons of administrative region boundaries.
Combining data from multiple sources will typically involve reconciling multiple coordinate reference systems, which is easily accomplished by using the rgdal package (Bivand et al., 2015). The
RColorBrewer (Neuwirth, 2014) and classInt (Bivand, 2015) packages produce colours and intervals
respectively for z-axis colour scales. A Unix-like structure of separate software facilities strung together gives R power and flexibility when used for visualising spatial data. This flexibility comes
with the cost that relatively simple maps can often require a lengthy set of instructions which many
users find difficult to master.
The mapmisc provides a modest number of functions which together allow for maps to be produced by a small number of tidy lines of R code. The aim of mapmisc was originally to provide a
simple and coherent set of resources which address some of the criticisms made (in this Author’s
experience) by Geographical Information Systems (GIS) users stating that R’s maps are inadequate.
The core features of mapmisc are functions for adding the following to any map, regardless of the
coordinate reference system being used:
• a contextual background map layer;
• an inset map giving the position of the mapped area within a larger spatial region;
• a scale bar showing distance;
• an arrow pointing north, even if north is not ‘up’; and
• a z-axis scale and legend using GIS-standard colours and categories.
Accommodating different coordinate reference systems is a defining feature of mapmisc, and maps
of projected data are no more difficult to produce than maps in longitude-latitude coordinates.
A secondary aim of mapmisc is to streamline the writing of map-making code, reducing both the
drudgery involved and the potential for coding errors. The requirement here was to have teaching
slides in Sweave (Leisch, 2002) or knitr (Xie, 2014) where a code block is not larger than the map it
produces. Undergraduate students have used mapmisc for course assignments, and non-statistical
(but R-literate) collaborators have used and modified code scripts involving mapmisc.
A third goal of mapmisc is to enable and encourage the use of customised Coordinate Reference
Systems (CRS’s). Spatial statisticians should not hesitate to rotate data, choose a non-standard origin,
or use an axis other than a meridian line if it benefits them. mapmisc can assist in finding the CRS
with the smallest bounding box of the dataset in question, or the CRS where Euclidean distance gives
the closest approximation to distance on the sphere.
Installing required packages
The two most important packages required for using spatial data in R are the sp and raster packages,
which provided tools and classes for vector data (spatial data on a continuous domain) and raster
data (defined on a pixelated grid) respectively. Installing mapmisc with install.packages('mapmisc')
or by using a menu item on a GUI will install sp and raster if they are not already present. The RColorBrewer and classInt not installed automatically with mapmisc , but are strongly recommended
although not strictly necessary.
The R Journal Vol. XX/YY, AAAA 20ZZ
ISSN 2073-4859
C ONTRIBUTED RESEARCH ARTICLE
2
The rgdal package is not straightforward to install on all systems, so although it is essential for
most purposes it is not a requirement and is must be installed separately. Running install.packages('rgdal')
will work on most MS Windows systems and many Mac OS computers, most Linux distributions and
many Mac’s require the GDAL and PROJ.4 software to be pre-installed separately. Installing the packages libproj-dev and libgdal-dev through a package manager (such as synaptic) is usually sufficient
for Linux systems.
Mac systems where install.packages('rgdal') fails (currently Mavericks systems) are the most
problematic. Installers for GDAL can be found on http://www.kyngchaos.com/software/frameworks
the ‘GDAL Complete’ package should be sufficient. Users familiar with the Xcode command line
tools may prefer to install via http://www.macports.org or http://brew.sh. Once GDAL has been
installed, the R package can be installed with a command similar to the following.
install.packages('rgdal', type = "source",
configure.args=c('--with-proj-include=/usr/local/include',
'--with-proj-lib=/usr/local/lib'))
Load the packages with
library("rgdal")
## Loading required package: sp
## rgdal: version: 0.9-3, (SVN revision 530)
## Geospatial Data Abstraction Library extensions to R successfully loaded
## Loaded GDAL runtime: GDAL 1.11.2, released 2015/02/10
## Path to GDAL shared files: /usr/share/gdal/1.11
## Loaded PROJ.4 runtime: Rel. 4.9.1, 04 March 2015, [PJ_VERSION: 491]
## Path to PROJ.4 shared files: (autodetected)
## Linking to sp version: 1.1-0
library("mapmisc")
## Loading required package: raster
##
## Attaching package: 'raster'
##
## The following objects are masked from 'package:Hmisc':
##
##
mask, zoom
which also makes sp and raster available.
Getting started with spatial data in R
The getData function provided by raster is able to download a number of useful and interesting
spatial datasets. The coastline and borders of Finland can be fetched with
finland = raster::getData("GADM", country = "FIN", level = 0)
The object finland is a SpatialPolygonsDataFrame, and Bivand et al. (2013) contains a wealth of
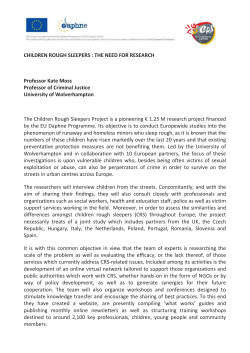
information on working with objects of this type. The command
plot(finland, axes = TRUE)
produces the plot in Figure 1a.
The choice of Finland as an example is due to it’s being far from the equator, and a useful contrast
on the other side of the world is New Zealand. The coastline of New Zealand, obtained with
nz = raster::getData("GADM", country = "NZL", level = 0)
includes a number of small outlying islands. The spatial extent of the nz object,
extent(nz)
## class
## xmin
: Extent
: -179
The R Journal Vol. XX/YY, AAAA 20ZZ
ISSN 2073-4859
C ONTRIBUTED RESEARCH ARTICLE
## xmax
## ymin
## ymax
3
: 179
: -52.6
: -29.2
spans the entire globe since one of these islands is on the opposite side of the 180◦ meridian. Finding
an appropriate axis limit through trial and error brings one to
plot(nz, xlim = c(167, 178), axes = TRUE)
and the map in Figure 1b.
Coordinate Reference Systems
The spatial coordinates in Figures 1a and 1b are in longitudes and latitudes, or, to use mathematical
nomenclature, spherical coordinates.
The difficulty spherical coordinates pose for spatial statisti√
cians is that Euclidean distance x2 + y2 is not always a useful measure of the distance separating
two points. The shortest route between two points on a sphere follows a Great Circle which divides
the sphere into two equal halves. The distance between two points along this path, Great Circle Distance (see Wikipedia, 2015a), can be computed with a trigonometric formula as implemented in the
spDists function in sp. Euclidean distance will be roughly proportional to Great Circle Distance for
two points near the equator and close to one another. In Finland and New Zealand, however, Euclidean distance will overemphasise the east-west direction since one degree of longitude is a much
shorter distance (in kilometres) than one degree of latitude. It is for this reason that Greenland appears larger than India on many maps even though the opposite is true. Most R packages which
perform spatial analyses rely on Euclidean distance, including this author’s own geostatsp (Brown,
2015), even though Great Circle Distance would be straightforward to implement. The importance of
transforming spherical coordinates to a coordinate system where Euclidean distance is a reasonable
approximation to Great Circle Distance should not be underestimated.
A large number of Coordinate Reference Systems (CRS’s) are in use, and Munroe (2011) is a useful
introduction to some of the most popular ones. The Finland Uniform Coordinate System, having
European Petroleum Standards Group code 2393, is a Transverse Mercator projection (see Wikipedia,
2015b) which x and y coordinates giving positions on a cylinder containing the earth. This projection
is obtained from rgdal with
CRS("+init=epsg:2393")
##
##
##
##
##
CRS arguments:
+init=epsg:2393 +ellps=WGS84 +proj=tmerc +lat_0=0 +lon_0=27
+k=1 +x_0=3500000 +y_0=0
+towgs84=-96.062,-82.428,-121.753,4.801,0.345,-1.376,1.496
+units=m +no_defs
The entry +lon_0=27 indicates that the cylinder touches 27◦ meridian line at every point. Provided
two points are reasonably close to the 27◦ meridian, Euclidean distance between their Finish Uniform Coordinates will be very close to the true distance between them. The map of Finland can be
converted to this coordinate system using spTransform from rgdal with
finlandMerc = spTransform(finland, CRS("+init=epsg:2393"))
Figure 1c is the result of plotting this object with plot(finlandMerc,axes=TRUE). Notice the projected
map has a wider base and narrower top than the long-lat map in Figure 1a. The coordinates in Figure
1c refer to an origin where the 27◦ meridian intersects the equator, with the +x_0= argument above
indicating that 3,500km is added to the x coordinates.
Map projections can be constructed from any cylinder containing the Earth, and there is no mathematical requirement to stick to a standard projection with an epsg: identifier. The point (170◦ E, 45◦ S)
is an intuitive the location of the origin for a transformed map of New Zealand, being near the centre
of the south island. The cylinder can follow any Great Circle, it need not be a meridian line, and a
Great Circle angled 40◦ clockwise would run the length of the two islands. Cylindrical projections
with an angle are termed Oblique Mercator Projections (see Snyder, 1987, page 66), and can be constructed with mapmisc’s omerc function. This New Zealand projection is obtained by
nzCrs = omerc(c(170, -45), angle = 40)
nzCrs
The R Journal Vol. XX/YY, AAAA 20ZZ
ISSN 2073-4859
(b) New Zealand,
Longitude-Latitude
6e+05
2e+05
−2e+05
50°S
(a) Finland,
Longitude-Latitude
165°E 170°E 175°E 180°
6600000
45°S
7000000
40°S
7400000
35°S
68°N
66°N
64°N
62°N
60°N
20°E
26°E
28°E
30°E
32°E
22°E
24°E
1e+06
7800000
4
30°S
70°N
C ONTRIBUTED RESEARCH ARTICLE
3200000
3500000
(c) Finland Transverse
Mercator
−6e+05
−2e+05
2e+05
(d) New Zealand,
Oblique Mercator
Figure 1: Basic maps of Finland and New Zealand in different Coordinate Reference Systems
The difference between the above and the projection for Finland is the omerc in place of tmerc, with
the additional argument +alpha=40 specifying an angle. The New Zealand coastline can be projected
to this CRS with spTransform.
nzRot = spTransform(nz, nzCrs)
The small outlying islands can be cropped from the New Zealand boundary using the gIntersection
function in the rgeos package (Bivand and Rundel, 2014). The main islands are located between
-600000 and 50000 in the x direction and -360000 and 1500000 in the y direction, values obtained
by plotting the transformed polygon with plot(nzRot) and clicking on the map after running the
locator function. Using raster’s extent function is the simplest way to create a rectangular polygon
from these coordinates, and the cropping is accomplished with
forClip = as(extent(-6e+05, 5e+05, -360000, 1500000), "SpatialPolygons")
crs(forClip) = crs(nzRot)
nzClip = rgeos::gIntersection(nzRot, forClip)
Figure 1d results from executing plot(nzClip,axes=TRUE), and New Zealand has been rotated 40◦
to a vertical position.
Mapping with mapmisc
Figure 2 contains the maps of Finland and New Zealand from Figures 1c and 1d, where mapmisc has
been used to add background images, a scale bar, and an inset map.
Backgrounds images are obtained from the openmap function, which downloads map tiles from
http://openstreetmap.org and other sources. The images used in Figure 2 were obtained with
nzBg = openmap(nzClip, path = "mapquest-sat")
finlandBg = openmap(finlandMerc, path = "landscape")
The first argument of openmap is used to obtain the spatial extent of the map to retrieve and the
CRS the map will be projected to. Any spatial object x for which extent(x) and projection(x) are
defined can be provided. The path= argument specifies the source of the map, and sample maps from
the various sources are shown in Figure 9 in the Appendix. The level of detail in the map is specified
by providing either a zoom level (zoom=) or a maximum number of tiles (defaults to maxTiles=9) for
which a corresponding zoom level is found.
The objects produced by openmap are rasters, converted from image files downloaded from map
tile servers. The Finland map is a RasterLayer
finlandBg
##
##
##
##
##
##
class
dimensions
resolution
extent
coord. ref.
data source
:
:
:
:
:
:
RasterLayer
822, 670, 550740 (nrow, ncol, ncell)
2130, 2130 (x, y)
2505872, 3932972, 6172770, 7923630 (xmin, xmax, ymin, ymax)
+init=epsg:2393 +proj=tmerc +lat_0=0 +lon_0=27 +k=1 +x_0=3500000 +y_0=0 +ellps=intl +towgs84=-96.062,-82.428,-121.753,4.801
in memory
The R Journal Vol. XX/YY, AAAA 20ZZ
ISSN 2073-4859
C ONTRIBUTED RESEARCH ARTICLE
## names
## values
5
: landscape
: 1, 1340 (min, max)
notice the CRS is the same as the finlandMerc object. The New Zealand map is a RasterStack with
red, green and blue layers.
class(nzBg)
## [1] "RasterStack"
## attr(,"package")
## [1] "raster"
names(nzBg)
## [1] "mapquest.satRed"
"mapquest.satGreen" "mapquest.satBlue"
The Finland map can be viewed with plot(finlandBg), whereas the three-layered New Zealand map
is shown with plotRGB(nzBg). A third map required for the plots in Figure 2 is the inset map on the
right. The code below retrieves a map where New Zealand (at 170◦ E and 45◦ S) is in the south-west
corner, the northern limit of Finland (roughly 70◦ ) fits within the map, and the western extremity of
the map stops just short of London.
eurasia = openmap(extent(0, 170, -45, 70), path = "osm-no-labels")
Figure 2a is produced with the code below.
map.new(finlandMerc, 0.7)
plot(finlandBg, add = TRUE)
plot(finlandMerc, add = TRUE)
scaleBar(finlandMerc, "bottomright")
insetMap(finlandMerc, "right", map = eurasia, width = 0.45)
The functions run are the following:
• map.new initialises a new plot area suitable for showing finlandMerc. The second argument of
0.7 specifies that the left 70% of the plot will contain the map and the right 30% will be left for
legends or inset maps.
• plot(finlandBg,add=TRUE) adds the background map to the existing plot. Reprojecting the
map to the Finish Uniform Coordinate System has distorted the letters and much of the text is
illegible.
• plot(finlandMerc,add=TRUE) adds the Finland boundary.
• scaleBar produces the 200km scale and north arrow in the bottom right of the map. Although
scaleBar can deduce the coordinates of the mapped region, it must be told the CRS of the
plot by passing the finlandMerc object. A CRS object or character string could also have been
supplied.
• insetMap produces the small map to the right, and as with scaleBar it must be told the CRS of
the map. Shown in red in the inset map is the area mapped in the plot. The width argument
specifies the width of the inset map as a fraction of the plotting region.
The New Zealand map in Figure 2b is produced with similar code.
map.new(nzClip, 0.7)
plotRGB(nzBg, add = TRUE)
plot(nzClip, add = TRUE, border = "red")
scaleBar(nzClip, "bottomright", seg.len = 6)
insetMap(nzClip, "right", map = eurasia, width = 0.45)
The use of plotRGB in place of plot for the background map is the only noticeable difference.
The map images were retrieved from OpenStreetMap.org and Mapquest, and although they are
free to use they must be attributed. The openmapAttribution function produces appropriate attribution from an object produced by openmap or the name of a tile path. The captions in Figure 2 were
produced with the assistance the following.
openmapAttribution(nzBg, short = TRUE)
##
mapquest.sat
## "Tiles courtesy of MapQuest(http://www.mapquest.com)"
The R Journal Vol. XX/YY, AAAA 20ZZ
ISSN 2073-4859
C ONTRIBUTED RESEARCH ARTICLE
(a) Finland. Background
©OpenStreetMap
6
(b) New Zealand. Tiles courtesy of
MapQuest and ©OpenStreetMap
Figure 2: Maps produced using the mapmisc package, containing background images, inset maps,
and scale bars.
The Acknowledgements section of this paper has used this function without the short=TRUE argument.
strwrap(openmapAttribution(finlandBg), 70)
##
##
##
##
[1]
[2]
[3]
[4]
"copyright OpenStreetMap.org contributors. Data by OpenStreetMap.org"
"available under the Open Database License"
"(opendatacommons.org/licenses/odbl), cartography is licensed as CC"
"BY-SA (see www.openstreetmap.org/copyright)."
The additional argument type='latex' is used in the source code for this paper.
Colour scales
The colourScale and legendBreaks functions in mapmisc are able to create and display sequences of
‘z-axis’ intervals or bins with assigned colours for mapping spatial data. The RColorBrewer package
gives R users access to the popular ColorBrewer collection of pallets, all of which are displayed in
Table 2 in the Appendix. A number of straightforward but tedious steps are involved in creating
suitable bins, assigning colours to data points based on these bins, specifying transparency when
overlaying colours on background maps, and displaying the intervals and colours in a legend. The
process has been simplified as much as possible in mapmisc, although at least five separate lines of
R code are required to produce a single map.
Points and polygons
Consider, as a motivating example, the task of visualising the spatial variation in fertility rates in
Europe using data available from the European Union. Eurostat divides the continent into a large
number of NUTS (an acronym in no need of a definition) and makes social and demographic data
on the NUTS’s available at http://ec.europa.eu/eurostat/data/database. Boundaries can be obtained from http://ec.europa.eu/eurostat/web/gisco/geodata/reference-data/administrative-units-statistical-units . Figure 3 shows the
NUTS-level fertility rate in 2010 for the 309 NUTS.
Code in the Appendix for downloading and merging the boundary files and fertility rates produces a SpatialPolygonsDataFrame object euroF. Each polygon in the object is a NUTS, and fertility
rates for each NUTS are provided for the years 2001 to 2012 inclusive.
euroF
The R Journal Vol. XX/YY, AAAA 20ZZ
ISSN 2073-4859
C ONTRIBUTED RESEARCH ARTICLE
##
##
##
##
##
##
##
##
class
features
extent
coord. ref.
variables
names
min values
max values
:
:
:
:
:
:
:
:
7
SpatialPolygonsDataFrame
309
-24.5, 44.8, 34.6, 71.2 (xmin, xmax, ymin, ymax)
+proj=longlat +ellps=GRS80 +no_defs
16
NUTS_ID, STAT_LEVL_, SHAPE_Leng, SHAPE_Area, 2001, 2002, 2003, 2004, 2005, 2006, 2007, 2008, 2009, 2010, 2011, ...
AT11,
2,
0.134,
1.00e+00, 0.88, 0.86, 0.91, 0.93, 0.96, 0.98, 1.02, 1.08, 1.08, 1.04, 1.05, ...
UKN0,
2,
9.942,
9.96e-01, 2.07, 2.06, 2.09, 2.05, 2.06, 2.12, 2.09, 2.27, 3.79, 3.77, 3.78, ...
The polygons are transformed to the European Terrestrial Reference System (EPSG code 3034) below.
euroF = spTransform(euroF, CRS("+init=epsg:3034"))
The legend in Figure 3 has eight colours, uses the ‘Spectral’ palette from RColorBrewer, and has
the order of colours reversed so that blues are low values and reds are large values. This colour scale
was produced with the colourScale function by using the breaks=8, col='Spectral' and rev=TRUE
arguments.
ecol = colourScale(euroF[["2010"]], breaks = 8, col = "Spectral",
rev = TRUE, style = "jenks", dec = 1, opacity = 0.5)
The first argument specifies that the 2010 column of the data frame in euroF contains the data of
interest. The style argument controls how the breaks are computed, and the 'jenks' option used
here results in a call to the classIntervals function in the classInt package. The break points are
rounded to one decimal place because of the dec=1 argument, and opacity=0.5 option gives the
plotted colours 50% transparency.
The result of a call to colourScale is a list containing the break points for bins (breaks), colours
associated with the bins (col), and a vector of length 309 (plot) with one colour per NUTS.
names(ecol)
## [1] "col"
"breaks"
"colOpacity" "plot"
ecol$breaks
## [1] 1.0 1.3 1.5 1.7 1.9 2.0 2.4 2.9 3.8
ecol$col
## [1] "#3288BD" "#66C2A5" "#ABDDA4" "#E6F598" "#FEE08B" "#FDAE61"
## [7] "#F46D43" "#D53E4F"
length(ecol$plot)
## [1] 309
The breaks and col elements are used for displaying a legend, whereas the plot element can be
passed as a col= argument when running plot on a SpatialPoints or SpatialPolygons object.
A background map must be fetched before producing the plot, and the 'osm-no-labels' tiles
which contain no writing or labels is obtained below.
euroMap = openmap(euroF, maxTiles = 15, path = "osm-no-labels")
Country names will be added to the map separately using the text function, using data downloaded
with raster’s getData function.
world = raster::getData("countries")
Some of the special characters in the country names will cause problems when an R session has not
had Unicode support enabled, and the interests of portability the names are encoded to a simpler
character set.
world$NAME = iconv(as.character(world$NAME), "utf8", "latin1")
The world object is a SpatialPolygonsDataFrame, but the text function used to add text to a plot
requires a single point rather than a polygon for positioning each country’s name. Converting world
to a SpatialPointsDataFrame with the code below will convert each country’s boundary polygon to
a single point at it’s centroid.
The R Journal Vol. XX/YY, AAAA 20ZZ
ISSN 2073-4859
C ONTRIBUTED RESEARCH ARTICLE
8
fertility
3.8
2.9
2.4
2
1.9
1.7
1.5
1.3
1
Iceland
Finland
Norway
Sweden
Estonia
Latvia
Denmark
Ireland
Lithuania
Belarus
United
Kingdom
Netherlands
Belgium Germany
Poland
Czech
Republic
Slovakia
France Switzerland
Kazakhstan
Austria Hungary
Ukraine
Moldova
GeorgiaAzerbaijan
Romania
Croatia
Bosnia
Serbia
Italy Herzegovina Bulgaria
Turkey
Portugal Spain
Greece
Syria
Iraq
1000km
Jordan
Figure 3: Fertility in Europe by NUTS. Background ©OpenStreetMap, ©EuroGeographics for the
administrative boundaries
worldP = SpatialPointsDataFrame(world, proj4string = CRS(projection(world)),
data = data.frame(world)[, c("NAME", "SQKM")])
Only the country’s name and surface are required, and other data columns have been dropped. To
prevent the map being crowded, all countries with a surface are less than 30,000km2 are removed and
spaces in country names are converted to line breaks. Finally, the object is reprojected to the same
CRS as the fertility dataset.
worldP = worldP[worldP$SQKM > 30000, ]
worldP$NAME = gsub("[[:space:]]", "\n", worldP$NAME)
worldE = spTransform(worldP, crs(euroF))
Figure 3 is produced with the code below. Notice the col=ecol$plot argument specifying the
colours with which each region is filled, and that the borders of each region were given 85% transparency by border=col2html('black',0.15). The text function has added country names to the
plot.
map.new(euroF)
plot(euroMap, add = TRUE)
plot(euroF, col = ecol$plot, add = TRUE, border = col2html("black",
0.15))
legendBreaks("topright", ecol, title = "fertility", bg = "white")
text(worldE, labels = worldE$NAME, cex = 0.8)
scaleBar(euroF, "bottom", bty = "n")
The legend on the right is added with legendBreaks, which passes most of its arguments to the
standard legend function. The role of legendBreaks is to ensure the 9 numeric break points are
printed near the boundaries between the coloured squares (as opposed to aligned with their centres).
Using the style='jenks' argument for colourScale triggers a clustering algorithm in classIntervals
which can be time consuming for large datasets. The 'quantile' and 'equal' arguments use quantiles and equally spaced break points respectively, with the latter able to have breaks equally spaced
on a transformed scale (i.e. log or square root). Some examples appear below.
colourScale(euroF[["2010"]], breaks = 8, style = "quantile", dec = 1)$breaks
## [1] 1.0 1.4 1.5 1.7 1.9 2.0 3.8
colourScale(euroF[["2010"]], breaks = 8, style = "equal")$breaks
The R Journal Vol. XX/YY, AAAA 20ZZ
ISSN 2073-4859
C ONTRIBUTED RESEARCH ARTICLE
9
## [1] 1.04 1.43 1.82 2.21 2.60 2.99 3.38 3.77
colourScale(euroF[["2010"]], breaks = 8, style = "equal", transform = "log")$breaks
## [1] 1.04 1.25 1.50 1.81 2.17 2.61 3.14 3.77
colourScale(euroF[["2010"]], breaks = 8, style = "equal", dec = 0)$breaks
## [1] 1 2 3 4
The final set of break points has a dec=0 argument, and although 8 breaks have been requested only
4 unique breaks remain after rounding to the nearest integer.
Rasters
Figure 4 shows two elevation maps of New Zealand produced with the assistance of the colourScale
and legendBreaks functions. The elevation data is obtained using the raster package’s getData function.
nzAlt = raster::getData("alt", country = "NZL")
The nzAlt object is a list of two elements, with elevation in two disjoint areas which comprise New
Zealand. The first element includes the main island, its CRS is incomplete (at the time of writing) and
should be re-specified.
nzAlt = nzAlt[[1]]
crs(nzAlt) = CRS("+init=epsg:4326")
This raster includes a number of outlying islands, and its size becomes more manageable after the
main island is extracted using the previously computed nzClip object.
dim(nzAlt)
## [1] 2244 1572
1
nzAlt = raster::crop(nzAlt, extent(spTransform(nzClip, crs(nzAlt))))
dim(nzAlt)
## [1] 1548 1458
1
Note that nzClip was transformed to the same CRS as the raster before its extent was used for cropping. This smaller raster is now reprojected to the rotated Oblique Mercator projection used earlier.
nzAltRot = projectRaster(nzAlt, crs = crs(nzClip))
dim(nzAltRot)
## [1] 2424 3078
1
Reprojecting the raster has made it larger, as it needs a rectangular bounding box large enough to
contain the rotated rectangle which was the original raster. Many of the entries in nzAltRot are NA,
however, as in this projection the main islands are contained within a small bounding box in the
centre. The trim function removes the outer rows and columns of the raster which contain only
missing values.
nzAltRot = raster::trim(nzAltRot)
nzAltRot
##
##
##
##
##
##
##
##
class
dimensions
resolution
extent
coord. ref.
data source
names
values
:
:
:
:
:
:
:
:
RasterLayer
1933, 1255, 2425915 (nrow, ncol, ncell)
552, 727 (x, y)
-561568, 131192, -321367, 1083924 (xmin, xmax, ymin, ymax)
+proj=omerc +lat_0=-45 +lonc=170 +gamma=0 +k=1 +alpha=40 +x_0=0 +y_0=0 +ellps=WGS
in memory
NZL1_msk_alt
-15.8, 3028 (min, max)
The R Journal Vol. XX/YY, AAAA 20ZZ
ISSN 2073-4859
C ONTRIBUTED RESEARCH ARTICLE
10
Since Raster objects are typically large, with nzAltRot having over 2 million entries, it is convenient that objects in the raster package provide easy access to the maximum and minimum values
(−15.85 and 3028.109 above). The use of the style='equal' argument is recommended with rasters,
as is done below.
nzAltCol = colourScale(nzAltRot, breaks = 7, col = terrain.colors,
style = "equal", dec = -2)
Here the col= argument was given the terrain.colors function, and any function accepting a single
integer argument and returning a vector with the specified number of colours would suffice. Below
a second colour scale is computed using the 'OrRd' colour palette and a supplied vector of breaks.
nzAltTrans = colourScale(nzAltRot, breaks = c(-20, 100, 500, 1200,
2000, 3100), col = "OrRd", style = "fixed", dec = -1, opacity = c(0.2,
1))
Here the opacity argument has been given a vector of length 2, giving the opacity of the first colour
and last colour respectively with intervening colours having opacities which are linear interpolations
of these values.
Figure 4a is produced with code below. No background map is present, though the background
has been set to a sea-like colour. The important line of code here is the one beginning with plot(nzAltRot,...
which adds the elevation data to the map. The col and breaks elements of the colour scale nzAltCol
are passed as identically named arguments of the plot method from the raster package. The legend=FALSE
argument prevents plot from adding its own legend, which would not fit well with this map as it
must appear on the right.
par(bg = "lightblue1")
map.new(nzClip)
par(bg = "white")
plot(nzAltRot, col = nzAltCol$col, breaks = nzAltCol$breaks, legend = FALSE,
add = TRUE)
plot(nzClip, add = TRUE, border = col2html("red", 0.4))
legendBreaks("bottomleft", nzAltCol, title = "metres", bg = "white")
scaleBar(nzClip, "left")
The code for Figure 4b is below. Here the colOpacity element of the colour scale, which has 2-digit
opacity levels appended to each specified colour, is passed as col= argument to allow the satellite
photo beneath to be viewed.
map.new(nzClip)
plotRGB(nzBg, add = TRUE)
plot(nzAltRot, col = nzAltTrans$colOpacity, breaks = nzAltTrans$breaks,
legend = FALSE, add = TRUE)
legendBreaks("bottomleft", nzAltTrans, title = "metres")
scaleBar(nzClip, "left")
Categorical data
Maps of categorical data (or factor’s in R parlance) assign colours to categories rather than intervals,
and the breaks= argument of colourScale governs which of the categories will have colours assigned
to them. Figure 5 maps different land type categories in Africa, and although over 20 land categories
are present in the dataset only 10 are displayed.
The land cover data originate from the European Space Agency, and code in the Appendix downloads a convenient repackaging of these data from http://www.worldgrids.org/doku.php?id=wiki:
glcesa3. Two files are retrieved, the first being a tif raster file where each cell contains an integer
specifying an identifier for a land type category, and the second a text file giving a description of the
land type category to which each code is assigned.
The tif file containing the spatial data is imported into Ras a RasterLayer object with code similar to land=raster('myfile.tif'). This raster object spans the entire globe. To extract the central
section of Africa from the raster, the countries of Liberia and Tanzania are subset from the previously
downloaded world object and reprojected to the same CRS as the raster.
worldSub = world[grep("Liberia|Tanzania", world$NAME), ]
worldSub = spTransform(worldSub, crs(land))
A raster containing the land types for Liberia, Tanzania, and all places in between is cropped next.
The R Journal Vol. XX/YY, AAAA 20ZZ
ISSN 2073-4859
C ONTRIBUTED RESEARCH ARTICLE
11
(a) terrain.colors()
(b) "OrRd" colours with opacity.
Tiles courtesy of MapQuest
Figure 4: Elevation map of New Zealand
landSub = raster::crop(land, extend(extent(worldSub), 5))
The extend function has added an additional 5 units (in this case degrees latitude and longitude) to
the region to be extracted.
The file describing land categories is imported into R as a data.frame named landTable.
landTable[c(1:3, 20:23), ]
##
##
##
##
##
##
##
##
1
2
3
20
21
22
23
ID
label
11 No data (burnt areas,\n clouds,)
14
Rainfed croplands
20
Mosaic cropland
200
Bare areas
210
Water bodies
220
Permanent snow and ice
230 No data (burnt areas,\n clouds,)
This table is provided to colourScale alongside the landSub raster as a levels= argument. Here
levels must be a data frame with columns named ID and label giving identifiers and descriptions
respectively. Below 10 breaks have been requested, with style='unique' indicating that the data
are categorical rather than continuous. The 10 most common land types will be assigned colours,
although the exclude= argument specifies that several categories ( i.e. 11 no data, 210 water bodies,
200 bare areas) will not be colour-coded regardless of how prevalent they are. The 'Set3' colour
scale from RColorBrewer is used.
landLevels = colourScale(landSub, breaks = 10, style = "unique", col = "Set3",
exclude = c(11, 210, 220, 230), labels = landTable)
names(landLevels)
## [1] "col"
"breaks"
## [5] "colortable" "levels"
The R Journal Vol. XX/YY, AAAA 20ZZ
"colOpacity" "colourtable"
"legend"
ISSN 2073-4859
C ONTRIBUTED RESEARCH ARTICLE
broadleaved forest
regularly flooded
(semi−permanently or
temporarily)
Closed broadleaved
deciduous forest
herbaceous vegetation
(grassland, savannas or
lichens/mosses)
broadleaved evergreen or
semi−deciduous forest
(broadleaved or
needleleaved, evergreen
or deciduous) shrubland
Mosaic vegetation
(grassland/shrubland/forest)
Mosaic forest or
shrubland
Mosaic cropland
Open broadleaved
deciduous forest/woodland
Rainfed croplands
12
Figure 5: Land categories in central Africa. Background ©Stamen Design
As a result of the levels= being provided, the colourScale function has provided additional
outputs of colourtable and levels to be added to the landSub raster. Being Canadian, this author
is habituated to using two spellings of ’colour’ interchangeably and has provided the colourtable
object twice. This object is a vector of colours associated with each numeric category, and the raster
package uses American spelling to specify it’s place in a raster.
landSub@legend@colortable = landLevels$colourtable
The levels element of landLevels is a data frame with one row per category and including labels
and colours for each. It must be enclosed in a list when being added to a raster as follows.
levels(landSub) = list(landLevels$levels)
Two background images are included in Figure 5, one for the main plot and another for the inset
map.
landMap = openmap(landSub, path = "stamen-watercolor")
worldMapAf = openmap(landSub, path = "osm-no-labels", zoom = 2)
The landSub raster, having had landLevels$colortable and landLevels$levels attached to it, is the
only object required of the plot and legendBreaks functions.
map.new(worldSub)
plotRGB(landMap, add = TRUE)
plot(landSub, add = TRUE)
insetMap(landSub, "topright", map = worldMapAf)
legendBreaks("bottomleft", landSub, ncol = 2, inset = 0, bg = "white")
The ncol=2 argument to legendBreaks refers to two columns (rather than two colours) and is passed
directly to legend.
An alternative to including the legend on the plot is to create an “in-line” legend, possibly in the
figure caption. The legendTable function assists in this task, with the code
cat(legendTable(landSub, collapse = "; "))
after compilation producing: Rainfed croplands (
); Mosaic cropland (
); Mosaic vegetation (grassland/shrubland/forest) (
); broadleaved evergreen or semi-deciduous forest (
);
); Open broadleaved deciduous forest/woodland (
);
Closed broadleaved deciduous forest (
Mosaic forest or shrubland (
); (broadleaved or needleleaved, evergreen or deciduous) shrubland
(
); herbaceous vegetation (grassland, savannas or lichens/mosses) (
); broadleaved forest
) . Table 1 is created with the following.
regularly flooded (semi-permanently or temporarily) (
Hmisc::latex(legendTable(landSub, type='latex'),
file='',rowname=NULL, where='hb', caption.loc='bottom', colheads=FALSE,
caption='Land categories in Figure \\ref{fig:plotLand}')
The R Journal Vol. XX/YY, AAAA 20ZZ
ISSN 2073-4859
C ONTRIBUTED RESEARCH ARTICLE
13
Optimised map projections
This section describes the use of the omerc function for defining Oblique Mercator projections. Two
methods of optimising map projections are implemented, with the angle of rotation chosen to produce the most compact bounding box possible or to preserve distances amongst a collection of points.
Smallest bounding box
Figure 6 shows New Zealand rotated in a manner optimised to produce the smallest possible bounding box (blue rectangle) and consequently the bounding box with the highest proportion of its contained area made up of the land mass of New Zealand. Using this projection minimises the number
of square cells a grid covering New Zealand would require in order to achieve a given spatial resolution, which would provide a computational advantage when using a statistical model which operates
on a grid. The projection also minimises the number of vertical inches which Figure 6 takes up on
the page, which is the reason a clockwise rotation is used in place of the anti-clockwise rotation from
Figure 2b.
This projection is obtained by passing a vector of rotation angles to the omerc function. The first
argument below is the nzClip object, and the origin of the Oblique Mercator projection will be its
centroid. A sequence of Oblique Mercator projections using Great Circles angled between 10 and 50
degrees from the north will be formulated, and the bounding box of New Zealand in each projection
will be computed. The projection returned by omerc uses the angle giving the smallest such box, with
the argument +alpha= showing a 22◦ angle in this example.
nzRotOptCrs = omerc(nzClip, seq(10, 50, by = 0.5), post = "wide")
nzRotOptCrs
## CRS arguments:
## +proj=omerc +lat_0=-41.1293043007557 +lonc=170.967146720823
## +alpha=22 +k=1 +x_0=0 +y_0=0 +gamma=90 +ellps=WGS84 +units=m
A positive angle rotates the coordinate axes clockwise, which gives the resulting map the appearance of being rotated anti-clockwise. An Oblique Mercator’s Great Circle becomes the y-axis of the
coordinate system, and a projection should seek to have as much of the area of interest as possible
being close to this Great Circle. An optimal projection will therefore have a tall and narrow bounding
box, in this instance the spine of New Zealand should run up and down the y-axis. The limits of
10 and 50 for the sequence of angles above are rough estimates of the amount of anti-clockwise rotation required to sit New Zealand upright. The argument post='wide' in omerc specifies that a short
and wide bounding box is required, and this is accomplished by rotating the planar x-y coordinates
post-projection. The +gamma=90 element of the CRS is where this post-projection rotation is specified.
New Zealand is reprojected and a new background map in this projection is produced below.
nzRotOpt = spTransform(nzClip, nzRotOptCrs)
nzBgRot = openmap(nzRotOpt, path = "cartodb", extend = 20000)
Figure 6 is produced with the following.
Rainfed croplands
Mosaic cropland
Mosaic vegetation (grassland/shrubland/forest)
broadleaved evergreen or semi-deciduous forest
Closed broadleaved deciduous forest
Open broadleaved deciduous forest/woodland
Mosaic forest or shrubland
(broadleaved or needleleaved, evergreen or deciduous) shrubland
herbaceous vegetation (grassland, savannas or lichens/mosses)
broadleaved forest regularly flooded (semi-permanently or temporarily)
Table 1: Land categories in Figure 5
The R Journal Vol. XX/YY, AAAA 20ZZ
ISSN 2073-4859
C ONTRIBUTED RESEARCH ARTICLE
14
map.new(nzRotOpt, 0.8)
plot(nzBgRot, add = TRUE)
plot(nzRotOpt, add = TRUE, border = "red")
plot(extent(nzRotOpt), add = TRUE, col = "blue")
scaleBar(nzRotOpt, "bottomright", bty = "n")
insetMap(nzRotOpt, "topright", map = eurasia, width = 0.275)
Figure 6: New Zealand in a 22◦ Oblique Mercator projection ( — ) with bounding box ( — ). Background ©CartoDB , ©OpenStreetMap
Preservation of distances
The motivation given in the Introduction for the use of map projections was to enable the use of
Euclidean distance on geographic data. The appearance of Canada on maps is particularly sensitive
to the CRS used, being a large country at high latitude. Figure 7 shows Canada in four different CRS’s,
the first of which is an Oblique Mercator optimised to preserve distances between 12 provincial and
territorial capital cities. Unlike the New Zealand projection, however, the x-y coordinates on the
Mercator’s cylinder are inverse-rotated to preserve the north-south direction as up-down.
Oblique Mercator projections are defined by an origin and an angle of rotation, only the latter
is optimised by the omerc function. Here we will set the origin somewhat arbitrarily as the town of
Flin Flon, Manitoba, as an alternative to the centroid-based origin used earlier. Residents of Toronto,
this author included, affectionately refer to their city as ‘The Centre of the Universe’ 1 , but Flin Flon
is a more suitable Oblique Mercator centroid for two reasons. First, Flin Flon’s latitude is a useful
compromise between being as northerly as possible (in order to accommodate the arctic islands) and
staying reasonably close to the populated cities in the south. Second, using Flin Flon as the location
where the inverse rotation will preserve the north-south direction as vertical should produce a map
with a familiar shape. Flin Flon is just westerly enough to ensure a sizeable portion of southern
border following the 49th parallel will be horizontal, and moving the origin any further westward
would increase the distortion of the north direction in the east.
The locations of the cities required to compute this projection (Flin Flon and the provincial capitals) can be retrieved from www.geonames.org using the geonames package (Rowlingson, 2014). A
wrapper for the GNsearch function in mapmisc converts the data retrieved to a SpatialPointsDataFrame.
Readers wishing to run the code below will need to register for a free username at www.geonames.org
and record the username in R with options(geonamesUsername='yourusername').
##
##
##
##
library("geonames")
provincialCapitals = mapmisc::GNsearch(q = "canada&featureCode=PPLA")
provincialCapitals$name = provincialCapitals$toponymName
flinflon = mapmisc::GNsearch(q = "Manitoba&name_equals=Flin flon&featureCode=PPL")
The names of the provincial capitals and the location of Flin Flon are below.
provincialCapitals$name
## [1] "Toronto"
## [5] "Regina"
## [9] "Yellowknife"
## [13] "Iqaluit"
1 Many
"Edmonton"
"Victoria"
"Whitehorse"
"Winnipeg"
"Fredericton"
"Halifax"
"Québec"
"St. John's"
"Charlottetown"
Canadians residing outside Toronto prefer the somewhat less affectionate nickname of ‘Hogtown’.
The R Journal Vol. XX/YY, AAAA 20ZZ
ISSN 2073-4859
C ONTRIBUTED RESEARCH ARTICLE
15
coordinates(flinflon)
##
lng lat
## [1,] -102 54.8
The arguments given in the call to omerc below consist of: x giving flinfon as the origin of the
projection; angle giving a sequence spanning the entire range of possible rotation angles; post =
'north' specifying that the planar coordinates should be inverse-rotated to preserve the north direction; and preserve supplying the locations of the provincial capitals other than Iqaluit (the northerly
capital of Nunavut) for calculating the distances which the projections will seek to preserve.
cproj = omerc(x = flinflon, angle = seq(-90, 90, by = 0.25), post = "north",
preserve = provincialCapitals[provincialCapitals$name != "Iqaluit",
])
cproj
## CRS arguments:
## +proj=omerc +lat_0=54.768 +lonc=-101.865 +alpha=-83.75
## +k=0.998 +x_0=0 +y_0=0 +gamma=-83.753 +ellps=WGS84 +units=m
The projection above uses an origin (specified by lat_0 and longc) at the coordinates of Flin Flon
and a cylinder tangent to the Earth along a Great Circle angled 83.75◦ anticlockwise (given by gamma).
The k=0.998 component of the CRS specifies that the coordinates are multiplied by 0.998 thereby
ensuring the Euclidean distances between the provincial capitals are, on average, correct. Although
pairs of points along the Great Circle will have Euclidean distances and Great Circle distances being
equal, the provincial capitals are some distance from this Great Circle and without scaling would
have Euclidean distances which were on average 0.2% too large. The value of 0.2% is computed in
omerc by calculating Euclidean distances in an unscaled Oblique Mercator as well as Great Circle
distances obtained after reprojecting the cities to longitude-latitude. The alpha=−83.75 component
results from having used the post='north' option, rotating the coordinates on the cylinder so that
a vertical line passing through the origin contains points which are directly north or south of each
other.
Two cities on Figure 7 for whom coordinates have not yet been retreived are Kitimat, British
Columbia, and the hamlet of Grise Fiord, Canada’s most northerly civilian settlement2 . These locations are obtained below.
cities = rbind(provincialCapitals,
mapmisc::GNsearch(q='Grise&featureCode=PPLL'),
mapmisc::GNsearch(q='Kitimat&name_equals=Kitimat&featureCode=PPL'),
flinflon)
Also shown is the Great Circle which forms the y-axis of the Oblique Mercator. This circle is created
using one of the many useful functions in the geosphere (Hijmans, 2014) package.
gcircle = SpatialPoints(
geosphere::greatCircleBearing(flinflon@coords, -83.75),
proj4string=CRS("+init=epsg:4326"))
## Error in coordinates(coords): error in evaluating the argument 'obj' in selecting a method for
## Calls: :: ... tryCatch -> tryCatchList -> tryCatchOne -> <Anonymous>
The Canadian border shown on the figure is obtained with getData.
canada = raster::getData("GADM", country = "CAN", level = 0)
crsList = list(
'Oblique Mercator'=cproj,
'Lambert'=CRS("+init=epsg:3347"),
'Equidistant 2pt'=tpeqd(cities[cities$name %in% c("Edmonton","Toronto"),]),
'Web projection'=CRS("+init=epsg:3857"))
canT = mapply(spTransform, CRSobj = crsList, MoreArgs = list(x = canada))
## Error in mapply(spTransform, CRSobj = crsList, MoreArgs = list(x = gcircle)): object 'gcircle'
The R Journal Vol. XX/YY, AAAA 20ZZ
ISSN 2073-4859
C ONTRIBUTED RESEARCH ARTICLE
16
3
E
F
K
F
E
K
H
F
Q
C
V
W
S
E
F
K
H
W
R
F
Q
C
E
K
F
S
W
R
V
F
E
K
W
R
V
F
E
F
C
Q
S
W
R
V
F
E
K
T
H
F
Q
S
W
R
V
F
E
K
Halifax
Char'town
St. John's
Fredericton
Regina
K
T
T
V
H
R
W
F
Q
C
E
S
F
Kitimat
W
R
V
H
T
F
C
Q
H
F
Q
C
V
W
R
S
E
K
Flin Flon
H
F
Q
C
V
R
S
T
Victoria
Toronto
Kitimat
Flin Flon
T
Québec
H
V
F
Q
C
W
R
S
K
F
S
Winnipeg
−1
T
K
Edmonton
pct over
1
2
0
R
T
T
H
C
Q
S
T
H
F
C
T
F
E
−2
T
H
Q
F
C
K
S
E
V
W
(c) Lambert
(e) Equidistant 2pt , north
Y
W
K
F
E
R
V
G
W
Iqaluit
T
YI
F
S
E
K
G
C
W
R
Q
F
H
V
T
Whitehorse
pct over (inverted)
−1 −2 −3 −4
I
W
F
K
E
G
S
R
W
C
Q
V
F
H
S
Q
C
F
H
T
F
E
K
Y
I
R
W
V
S
Q
C
F
H
T
Grise Fiord
Yellowknife
Q
C
F
T
H
St. John's
T
E
R
F
W
W
Y
G
KI
E
F
V
R
W
0
S
Y
C
H
F
Q
T
E
R
W
F
C
HI
K
F
Q
V
Y
Grise Fiord
K
VI
S
G
W
C
H
F
Q
E
T
R
W
F
S
C
H
G
F
W
Q
Y
K
T
V
E
F
R
W
S
W
1
5
4
H
W
Y
C
K
F
T
E
F
V
Q
R
W
K
V
I
Whitehorse
Grise Fiord
Iqaluit
Whitehorse
Yellowknife
St. John's
(d) Oblique Mercator , north
S
C
H
F
Q
T
F
R
W
E
Iqaluit
C
K
H
F
Q
E
W
T
R
V
Yellowknife
C
K
H
F
Q
V
T
E
R
W
G
St. John's
Y
S
C
K
F
H
E
T
V
Q
R
W
G
I
−1
W
S
C
K
F
H
T
Q
E
V
R
W
−1
W
Y
W
Y
S
C
K
H
F
Q
E
W
R
V
T
pct over
2
3
I
W
Y
S
0
I
G
S
K
F
T
E
F
V
R
W
Q
(b) Equidistant 2pt
I
1
5
4
I
G
1
pct over
2
3
G
F
K
T
E
Q
R
V
W
H
F
C
Q
S
W
R
V
−5
(a) Oblique Mercator
G
C
K
F
T
E
F
V
Q
R
W
Halifax
Q
C
E
H
F
K
S
H
F
K
T
E
C
V
R
W
Q
E
T
F
W
H
R
Q
F
C
S
S
Char'town
C
Q
E
H
F
T
E
K
W
H
V
Q
F
C
S
F
St. John's
K
F
E
Q
F
T
F
K
E
H
V
R
W
F
S
C
Fredericton
F
Q
E
F
K
T
E
K
R
F
V
H
Q
F
C
S
Regina
R
W
V
T
R
H
W
F
Q
C
S
F
K
Victoria
H
R
W
F
Q
W
R
E
F
C
K
S
H
V
Québec
R
W
C
pct over
0.5 1.0
S
T
V
R
W
Winnipeg
T
V
0.0
T
V
V
H
Edmonton
H
E
Q
F
C
K
V
K
Toronto
R
W
S
T
−1.0
V
Kitimat
T
S
E
Q
S
K
F
H
C
E
H
F
C
K
Québec
Edmonton
Toronto
−0.2
Q
F
H
C
K
S
E
F
Q
F
H
K
C
S
Flin Flon
R
W
S
Halifax
V
S
S
E
F
Q
F
H
K
C
C
K
F
H
T
F
E
Q
V
R
W
Char'town
T
W
St. John's
V
S
R
R
W
Fredericton
T
T
V
Regina
E
Q
F
F
S
H
K
C
T
V
Victoria
W
R
R
W
0
H
4
2.0
C
T
1.5
V
Winnipeg
pct over
0.0 0.1 0.2 0.3 0.4
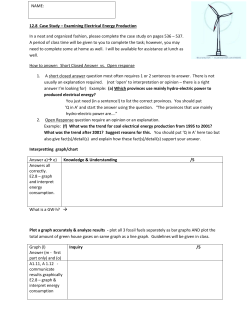
Figure 7: Canada in four map projections with a Great Circle ( · · · ). Background ©OpenStreetMap
(f) Lambert , north
Figure 8: Percentage by which Euclidean distance overestimates Great Circle distance between cities
for different map projections
The R Journal Vol. XX/YY, AAAA 20ZZ
ISSN 2073-4859
C ONTRIBUTED RESEARCH ARTICLE
17
## Error in points(gcircleT[[D]], cex = 0.1, col = "blue"): object 'gcircleT' not found
Three projections in addition to the Oblique Mercator are shown in Figure 7: a Lambert Conformal Conic projection used by the Atlas of Canada; a two-point Equidistant projection based on the
cities of Edmonton and Toronto; and the so-called ‘web projection’ used by Openstreetmap.org and
other internet sites. A list is created containing these four projections using mapmisc’s tpeqd function
in part.
crsList = list(
'Oblique Mercator'=cproj,
'Lambert'=CRS("+init=epsg:3347"),
'Equidistant 2pt'=tpeqd(cities[cities$name %in% c("Edmonton","Toronto"),]),
'Web projection'=CRS("+init=epsg:3857"))
The cities, Great Circle, and Canadian border are transformed to each of the projections. A list of the
four projected Canadian borders is created with mapply.
canT = mapply(spTransform, CRSobj = crsList, MoreArgs = list(x = canada))
Code for retrieving background maps and for producing Figure 7 appears in the Appendix.
Notable features in Figure 7 the Web projection’s overemphasis of the high arctic regions, the
downward slope of the Lambert projection, and the upward slope of the Two Point Equidistant map.
The Oblique Mercator’s Great Circle, passing through Flin Flon, Halifax and Kitimat at a nearly horizontal −83.75◦ , is necessarily a straight line in the Oblique Mercator projection and appears straight
in two other projections. There are three north arrows at the bottom of each map, and only the Web
projection has the propertly that North is in the vertical direction throughout the map. An Equidistant
projection where the north direction is preserved could have been obtained by selecting two nodes
with the same latitide (i.e. Fredericton and Victoria). The choice of mismatched nodes (Edmonton
and Toronto) is intended to demonstrate that unlike the Oblique Mercator, the Equidistant projection
is not self-righting.
Figure 8 compares Euclidean distance to Great Circle distance for three of the map projections,
with the percentage by which the former overestimates the latter being shown for each pair of cities.
Distances for the 12 most southerly locations are shown in Figures 8a-c, the y-axes are different and
the horizontal lines are at -0.2, 0, and 0.2 for each plot. Figures 8d-f shows the distances from the five
most northerly locations to all other points, with the scale for the Lambert projection being inverted.
The aim of this Figure is not to establish the superiority of one projection over the others, they each
have their merits and drawbacks, but rather to demonstrate that there are efficiencies to be gained
through the use of customized projections. That said, the Oblique Mercator is the most consistently
accurate, with the the exception of distances involving Grise Fiord. The optimisation which produced this projection deliberately excluded the arctic islands, so this lack of accuracy at the highest
latitudes is not surprising. Distances involving Edmonton and Toronto are highly accurate with the
Equidistant projection, which should be expected given those two cities are the projection’s nodes,
but occasionally off by as much as 2%. The Lambert projection does not appear to be a CRS which
statisticians should consider using for Canada when Euclidean distance is the primary concern.
Conclusions
This paper and the mapmisc package aim to contribute to and advance the suite of tools available
to the growing community of R users performing advanced statistical analyses of spatial data. The
first contribution made is the provision of tools which simplify the creation and use of colour scales,
background maps and legends. The second contribution is the removal of all barriers to using a
map projection which is appropriate for the problem at hand, even when a non-standard projection
optimized for a particular study region is desired. The way in which mapmisc seeks to accomplish
these goals is by automating many of the tasks involved, with obtaining and reprojecting map tiles or
creating colour scales with transparency being two examples. A small amount of new functionality
has been provided by mapmisc to R users, these being the creation of optimised map projections and
the creation of inset maps and scale bars for data in a rotated projection.
The scope of mapmisc has been kept deliberately narrow. Maps are static rather than interactive,
base graphics are used, all spatial data types used are from sp or raster, and functions have been
kept simple with few arguments. In contrast to spplot and ggplot2(Wickham, 2009), maps made
mapmisc are produced with a sequence of independent function calls with each function performing
2 Readers should be aware that Grise Fiord resulted from a government-run resettlement program in the 1950’s,
and involved the deception and neglect of the indegenous people who were relocated to the hamlet.
The R Journal Vol. XX/YY, AAAA 20ZZ
ISSN 2073-4859
C ONTRIBUTED RESEARCH ARTICLE
18
a very specific task. This approach was originally intended to benefit students and the non-specialist,
and the package grew out of code originally provided to students in an undergraduate course.
Additional motivations for the framework mapmisc employs are reproducibility and consistency
when producing multiple maps. Colour scales and background maps are defined before a map is
produced, and plot areas are laid out before any graphics are added. While sometimes clumsy for
interactive use, mapmisc code fits tidily within Sweave or knitr documents and script files. Reproducability is an area where R has a clear advantage over many Geographical Information Systems, and
spatial problems where an environment other than R is required are becoming fewer in number over
time.
Acknowledgements
Attributions for background maps:
Figures 2a, 7, 3 and all inset maps: ©OpenStreetMap contributors. Data by OpenStreetMap available under the Open Database License, cartography is licensed as CC BY-SA.
Figure 2b, 4b: Tiles courtesy of MapQuest, portions courtesy NASA/JPL-Caltech and U.S. Depart.
of Agriculture, Farm Service Agency.
Figure 5: Map tiles by Stamen Design under CC BY 3.0. Data by OpenStreetMap available under the
CC BY-SA
Figure 6: Map tiles by CartoDB under CC BY 3.0. Data by OpenStreetMap available under the Open
Database License
Figure 9: the Appendix is ©OpenStreetMap contributors. Data by OpenStreetMap available under
the Open Database License, cartography is licensed as CC BY-SA. with the exceptions below.
mapquest : Tiles courtesy of MapQuest. Data by OpenStreetMap available under the Open
Database License
mapquest-sat : Tiles courtesy of MapQuest, portions courtesy NASA/JPL-Caltech and U.S.
Depart. of Agriculture, Farm Service Agency.
mapquest-labels : Tiles courtesy of MapQuest. Data by OpenStreetMap available under the
Open Database License
maptoolkit : ©Toursprung GmbH Data by OpenStreetMap available under the Open Database
License
humanitarian : ©OpenStreetMap contributors. Data by OpenStreetMap available under the
Open Database License, cartography by Humanitarian OSM team is licensed as CC BYSA.
cartodb : Map tiles by CartoDB under CC BY 3.0. Data by OpenStreetMap available under the
Open Database License
cartodb-dark : Map tiles by CartoDB under CC BY 3.0. Data by OpenStreetMap available
under the Open Database License
stamen-toner : Map tiles by Stamen Design under CC BY 3.0. Data by OpenStreetMap available under the Open Database License
stamen-watercolor : Map tiles by Stamen Design under CC BY 3.0. Data by OpenStreetMap
available under the CC BY-SA
Bibliography
R. Bivand. classInt: Choose Univariate Class Intervals, 2015.
package=classInt. R package version 0.1-22. [p1]
URL http://CRAN.R-project.org/
R. Bivand and C. Rundel. rgeos: Interface to Geometry Engine - Open Source (GEOS), 2014. URL http:
//CRAN.R-project.org/package=rgeos. R package version 0.3-8. [p4]
R. Bivand, T. Keitt, and B. Rowlingson. rgdal: Bindings for the Geospatial Data Abstraction Library, 2015.
URL http://CRAN.R-project.org/package=rgdal. R package version 0.9-2. [p1]
R. S. Bivand, E. Pebesma, and V. Gomez-Rubio. Applied spatial data analysis with R, Second edition.
Springer, NY, 2013. URL http://www.asdar-book.org/. [p2]
The R Journal Vol. XX/YY, AAAA 20ZZ
ISSN 2073-4859
C ONTRIBUTED RESEARCH ARTICLE
19
P. E. Brown. Model-based geostatistics the easy way. Journal of Statistical Software, 63(12):1–24, 2015.
URL http://www.jstatsoft.org/v63/i12/. [p3]
R. J. Hijmans. geosphere: Spherical Trigonometry, 2014. URL http://CRAN.R-project.org/package=
geosphere. R package version 1.3-11. [p15]
R. J. Hijmans. raster: Geographic Data Analysis and Modeling, 2015. URL http://CRAN.R-project.org/
package=raster. R package version 2.3-33. [p1]
F. Leisch. Sweave: Dynamic generation of statistical reports using literate data analysis. In W. H"ardle
and B. R"onz, editors, Compstat 2002 — Proceedings in Computational Statistics, pages 575–580. Physica Verlag, Heidelberg, 2002. URL http://www.stat.uni-muenchen.de/~leisch/Sweave. ISBN
3-7908-1517-9. [p1]
R. Munroe. Map projections. xkcd web comic, 2011. URL http://xkcd.com/977. [Online; accessed
11-March-2015]. [p3]
E. Neuwirth. RColorBrewer: ColorBrewer Palettes, 2014. URL http://CRAN.R-project.org/package=
RColorBrewer. R package version 1.1-2. [p1]
E. J. Pebesma and R. S. Bivand. Classes and methods for spatial data in R. R News, 5(2):9–13, November 2005. URL http://CRAN.R-project.org/doc/Rnews/. [p1]
B. Rowlingson. geonames: Interface to www.geonames.org web service, 2014. URL http://CRAN.Rproject.org/package=geonames. R package version 0.998. [p14]
J. P. Snyder. Map projections – a working manual. Professional Paper 1395, US Geologic Survey,
Washington, DC, 1987. URL http://pubs.usgs.gov/pp/1395/report.pdf. [p3]
H. Wickham. ggplot2: elegant graphics for data analysis. Springer New York, 2009. ISBN 978-0-38798140-6. URL http://had.co.nz/ggplot2/book. [p17]
Wikipedia. Great-circle distance — Wikipedia, the free encyclopedia, 2015a. URL http://
en.wikipedia.org/w/index.php?title=Great-circle_distance&oldid=654813081. [Online; accessed 20-April-2015]. [p3]
Wikipedia.
Transverse mercator projection — Wikipedia, the free encyclopedia, 2015b.
URL http://en.wikipedia.org/w/index.php?title=Transverse_Mercator_projection&oldid=
644679889. [Online; accessed 20-April-2015]. [p3]
Y. Xie. knitr: A comprehensive tool for reproducible research in R. In V. Stodden, F. Leisch, and
R. D. Peng, editors, Implementing Reproducible Computational Research. Chapman and Hall/CRC,
2014. URL http://www.crcpress.com/product/isbn/9781466561595. ISBN 978-1466561595. [p1]
Patrick Brown
Cancer Care Ontario
620 University Ave
Toronto, ON M5G 2L7 Canada
[email protected]
Additional code
European fertility
URL’s for web sites where data are obtained:
nutsUrl = "http://ec.europa.eu/eurostat/cache/GISCO/geodatafiles/NUTS_2010_60M_SH.zip"
Download and read in boundary file:
nutsFile = "euroNuts.zip"
if (!file.exists(nutsFile)) {
download.file(nutsUrl, destfile = nustFile)
}
unzip(nutsFile)
euroNuts = shapefile(grep("RG_60M_2010.shp$", unzip("euroNuts.zip",
list = TRUE)$Name, value = TRUE))
The R Journal Vol. XX/YY, AAAA 20ZZ
ISSN 2073-4859
C ONTRIBUTED RESEARCH ARTICLE
20
(a) osm,
©OpenStreetMap
(b) osm-no-labels,
©OpenStreetMap
(c) osm-de,
©OpenStreetMap
(d) osm-transport,
©OpenStreetMap
(e) bw-mapnik,
©OpenStreetMap
(f) mapquest, Tiles
courtesy of MapQuest
(g) mapquest-sat, Tiles
courtesy of MapQuest
(h) mapquest-labels,
Tiles courtesy of
MapQuest
(i) landscape,
©OpenStreetMap
(j) opentopomap,
©OpenStreetMap
(k) maptoolkit,
©Toursprung GmbH
(l) humanitarian,
©OpenStreetMap
(m) cartodb, ©CartoDB
(n) cartodb-dark,
©CartoDB
(o) stamen-toner,
©Stamen Design
(p) stamen-watercolor,
©Stamen Design
Figure 9: openmap tile sets
The R Journal Vol. XX/YY, AAAA 20ZZ
ISSN 2073-4859
C ONTRIBUTED RESEARCH ARTICLE
col
BrBG
max
11
PiYG
11
PRGn
11
PuOr
11
RdBu
11
RdGy
11
RdYlBu
11
RdYlGn
11
Spectral
11
Accent
8
Dark2
8
Paired
12
Pastel1
9
Pastel2
8
Set1
9
Set2
8
Set3
12
Blues
9
BuGn
9
BuPu
9
GnBu
9
Greens
9
Greys
9
Oranges
9
OrRd
9
PuBu
9
PuBuGn
9
PuRd
9
Purples
9
RdPu
9
Reds
9
YlGn
9
YlGnBu
9
YlOrBr
9
YlOrRd
9
21
palette
Table 2: Colour palettes from RColorBrewer, with col showing the character string to provide
colourScale or brewer.pal and max giving the maximum number of colours for each palette.
The R Journal Vol. XX/YY, AAAA 20ZZ
ISSN 2073-4859
C ONTRIBUTED RESEARCH ARTICLE
22
The fertility data are retrieved as a gzipped tab-separated text file, which the R.utils package is able
to decompress. The code below will download a copy of this file from the author’s web server if the
Eurostat download fails.
fertUrl = paste("http://ec.europa.eu/eurostat/estat-navtree-portlet-prod/BulkDownloadListing",
"?file=data/demo_r_frate2.tsv.gz", sep = "")
fertFile = "euro.tsv"
fertFileGz = paste(fertFile, ".gz", sep = "")
if (!file.exists(fertFile)) {
tryDownload = try(download.file(fertUrl, destfile = fertFileGz))
if (class(tryDownload) == "try-error") {
tryDownload = try(download.file("http://pbrown.ca/mapmisc/euro.tsv.gz",
destfile = fertFileGz))
}
if (class(tryDownload) == "try-error") {
warning("cant find the fertility file")
}
R.utils::gunzip(fertFileGz, overwrite = file.exists(fertFile))
}
euroDat = read.table(fertFile, header = TRUE, stringsAsFactors = FALSE,
sep = "\t")
euroDat = euroDat[grep("^TOTAL", euroDat[, 1]), ]
euroDat$timegeo = gsub("^TOTAL,", "", euroDat[, 1])
Merge the fertility and polygon data. Warning messages that not all rows of the fertility table can be
matched to polygons can be ignored.
euroF = sp::merge(euroNuts, euroDat, all.x = FALSE, by.x = "NUTS_ID",
by.y = "timegeo")
Exclude some of the outlying parts of the EU:
euroF = euroF[grep("^FR9[1-4]$|^PT[23]0$|^ES70$", euroF$NUTS_ID, invert = TRUE),
]
Land categories
Download and read in the land raster file:
landUrl = "http://www.worldgrids.org/lib/exe/fetch.php?media=glcesa1a.tif.gz"
gzfile = gsub("^http[[:print:]]+=", "", landUrl)
tiffile = gsub("\\.gz$", "", gzfile)
if (!file.exists(tiffile)) {
download.file(landUrl, destfile = gzfile)
R.utils::gunzip(gzfile, overwrite = file.exists(tiffile))
}
land = raster(tiffile)
Download and read in the table describing land categories:
levelsUrl = "http://www.worldgrids.org/lib/exe/fetch.php?media=glcesa.txt"
levelsFile = gsub("^http[[:print:]]+=", "", levelsUrl)
if (!file.exists(levelsFile)) {
download.file(levelsUrl, levelsFile)
}
landTable = read.table(levelsFile, header = TRUE, sep = "\t", stringsAsFactors = FALSE)
Create a shorter labels and a table which colourScale can accept:
landTable$shortLabel = gsub(
"^Closed to open |\\(([[:digit:]]|\\-|\\%|>|<|m)+\\)| (-|/) [[:print:]]+$",
"", landTable$NAME)
landTable$shortLabel = trim(
gsub(
'(.{1,25})(\\s|$)', '\\1\n ',
landTable$shortLabel)
)
The R Journal Vol. XX/YY, AAAA 20ZZ
ISSN 2073-4859
C ONTRIBUTED RESEARCH ARTICLE
23
landTable = data.frame(
ID= floor(landTable$MAXIMUM),
label = landTable$shortLabel)
Canada
Transform the Great Circle and cities:
gcircleT = mapply(spTransform, CRSobj = crsList, MoreArgs = list(x = gcircle))
citiesT = mapply(spTransform, CRSobj = crsList, MoreArgs = list(x = cities))
Obtain background maps:
mapT = mapply(openmap, x = canT[c("Oblique Mercator", "Lambert")],
MoreArgs = list(maxTiles = 12))
mapT[["Equidistant 2pt"]] = openmap(canT[["Equidistant 2pt"]], zoom = 2,
extend = -5e+05)
# add 1000km extra so the map goes as far as Greenland
mapT[["Web projection"]] = openmap(canT[["Web projection"]], maxTiles = 18,
extend = c(10^6, 0))
Create maps:
for (D in names(canT)) {
map.new(citiesT[[D]])
plot(mapT[[D]], add = TRUE)
plot(canT[[D]], add = TRUE, border = col2html("black", 0.4))
points(gcircleT[[D]], cex = 0.1, col = "blue")
points(citiesT[[D]], col = "red", pch = "+", cex = 1.5)
text(citiesT[[D]], labels = citiesT[[D]]$name, col = "red", pos = citiesT[[D]]$pos,
offset = 0.6, cex = 1.2)
scaleBar(canT[[D]], "bottomleft", seg.len = 0, bty = "n")
s1 = scaleBar(canT[[D]], "bottomright", seg.len = 0, bty = "n")
scaleBar(canT[[D]], c(citiesT[[D]]@coords[citiesT[[D]]$name ==
"Flin Flon", 1], s1$centre[2]), seg.len = 0, bty = "n")
scaleBar(canT[[D]], "topleft", seg.len = 1.3)
}
The R Journal Vol. XX/YY, AAAA 20ZZ
ISSN 2073-4859








© Copyright 2026