
CONTROLLING MIP: MAE143B Classical Control final exam, S2
CONTROLLING MIP: MAE143B Classical Control final exam, S2 2013, Version 1
3 hours, no electronics, closed book, 2 pages of notes allowed.
φr (t)
+
D2 (s)
θr (t)
+
P
D1 (s)
G(s)
plant
controller
φr (t) +
D2 (s)
θr (t)
φ(t)
u(t)
P
+
D1 (s)
u(t)
G1 (s)
θ(t)
θ(t)
G2 (s)
φ(t)
[P H1 (s)]
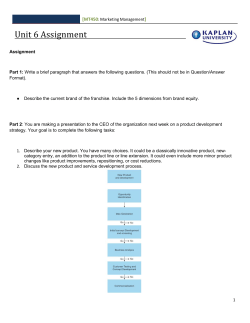
Consider a Segway-like robotic vehicle, a.k.a. “MIP”, where θ is the angle of the body and φ measures the rotation of the
wheels as they roll on a table. A motor is attached which converts an input voltage u to a torque τ that tends to rotate the body
in one direction and the wheels in the other. Define {mb , mw , Ib , Iw } as the masses and moments of inertia (about their respective
centers of mass) of the body & wheel, r as the radius of the wheel, ℓ as the distance from the axis of rotation of the wheel to the
center of mass of the body, g as the acceleration of gravity, and d1 and d2 as constants related to the motor efficiency; all these
parameters are positive. It was show in the S1 2013 MAE143a final that the linearized equations of motion of this vehicle are:
{[mb r ℓ] s2 }Φ(s) + {[Ib + mb ℓ2 ] s2 − mb g ℓ} Θ(s) + T(s) = 0,
2
2
2
{[Iw + r (mb + mw )] s }Φ(s) + {[mb r ℓ] s } Θ(s) − T (s) = 0,
⇒
L1 Φ(s) + L2 Θ(s) + T (s) = 0,
L3 Φ(s) + L1 Θ(s) − T (s) = 0,
(1)
{d1 s}Φ(s) − {d1 s}Θ(s) + T (s) = {−d2 }U(s),
{d1 s}Φ(s) − {d1 s}Θ(s) + T (s) = {−d2 }U(s),
where L1 = c1 s2 , L2 = c2a s2 − c2b, L3 = c3 s2 with c1 = mb r ℓ, c2a = Ib + mb ℓ2 , c2b = mb g ℓ, c3 = Iw + r2 (mb + mw ); note that
the {c1 , c2a , c2b , c3 } are positive. The above system equations may be written as the cascade of two transfer functions:
k1 s
d2 (L1 + L3 )
k1 s
Θ(s)
=
=
=
U(s) (L1 − d1 s)(L1 + L3 ) − (L3 + d1 s)(L1 + L2) s3 + a2 s2 − a1 s − a0 (s + p1 )(s + p2 )(s − p3 )
L1 + L2 − k2 (s + z1 )(s − z1 )
Φ(s)
=
.
=−
G2 (s) =
Θ(s)
L1 + L3
s2
G1 (s) =
(2a)
(2b)
where, defining t1 = c2a c3 − c21 and t2 = c1 + c3 , it follows that k1 = d2 (c1 + c3 )/t1 , a2 = d1 (2 c1 + c2a + c3 )/t1 , a1 = c2b c3 /t1 ,
a0 = d1 c2b /t1 , k2 = (c1 + c2a )/t2 , z1 = [c2b /(t2 k2 )]1/2 ; note that the {k1 , a2 , a1 , a0 , p1 , p2 , p3 , k2 , z1 } are positive, and that G2 (s)
has a negative gain. After inserting the parameter values, for the purpose of this exam, assume that
k1 = 100,
p1 = 10,
p2 = 1,
p3 = 10,
k2 = 1,
z1 = 10.
(2c)
In this exam, we will design simple SISO controllers and filters to stabilize this SIMO system following the Successive Loop
Closure (SLC) paradigm. Simple proportional control will turn out to be inadequate. You should be impressed by how much
of this practical and nontrivial problem that you can now address accurately by hand. Have fun with it!
1a. Select an initial control design D1 (s) characterized by stable pole/zero cancellations with G1 (s) in addition to a pole at the
origin and a stable pole at s = −pa :
(s + p1 )(s + p2 )
D1 (s) = K1
;
s(s + pa )
tune K1 and pa using root locus techniques to give an inner-loop rise time of tr = 0.18 sec and an overshoot of 15%. What
approximate design guides are you striving for? How do you satisfy them while “applying just enough control feedback to
narrowly achieve the performance specification”? Discuss in detail.
1b. Plot the Bode plots of G1 (s) and G1 (s) D1 (s). Recalling your goals of an inner-loop rise time of tr = 0.18 sec and an
overshoot of 15%, what are your several design goals now? Describe what adjustments you might perform to D1 (s) in order to
realize these goals. [For simplicity, the remainder of problem 1 on this exam will use the controller determined in problem 1a,
though the adjustments suggested in problem 1b will most assuredly improve it...]
1c. Using the controller D1 (s) designed in problem 1a, compute the closed inner-loop transfer function H1 (s) = G1 (s) D1 (s)/[1+
G1 (s) D1 (s)].
1d. Using the controller D1 (s) designed in problem 1a, what is the “system type” of L1 (s) = G1 (s) D1 (s)? [That is, writing
L1 (s) = b(s)/[sr a0 (s)] where a0 (s)|s=0 6= 0, what is r?] Compute the steady-state gain of the system H1 (s) determined in
problem 1c. [That is, apply the final value theorem, limt→∞ θ(t) = lims→0 s Θ(s), to the response of H1 (s) to a unit step input.]
What “prefactor” gain P should be used such that the steady-state gain of [P H1 (s)] is unity?
1e. Compute the step response of the scaled closed inner-loop system [P H1 (s)], as determined in problems 1c and 1d, analytically.
1f. The controller D1 (s) designed in problem 1a has a pure integrator (that is, a pole at the origin). What problem is sometimes
encountered by controllers of this type? Describe this problem in detail. If this pole at the origin is moved just to the left of the
origin, the closed inner loop will no longer be stable; explain why. Can we get away with this in this case? Discuss in detail.
2a. Design D2 (s) to control G2 (s) using root locus techniques, shooting for an outer-loop rise time of tr = 1.8 sec and an overshoot of 15%, assuming for the moment that [P H1 (s)] ≈ 1. (Hint: try lead compensation with a stable pole/zero cancellation,
using both positive and negative gain; which gets the job done?)
2b. Plot the Bode plots of G2 (s) and G2 (s) D2 (s). Recalling your goals of an outer-loop rise time of tr = 1.8 sec and an
overshoot of 15%, what are your several design goals now? Describe what adjustments you might perform to D2 (s) in order to
realize these goals. [For simplicity, the remainder of problem 2 on this exam will use the controller determined in problem 2a,
though the adjustments suggested in problem 2b will most assuredly improve it...]
2c. Using the controller D2 (s) designed in problem 2a, compute the approximate closed outer-loop transfer function H2 (s) =
G2 (s) D2 (s)/[1 + G2(s) D2 (s)] (that is, for the moment, continue to assume that [P H1 (s)] ≈ 1).
2d. Using the controller D2 (s) designed in problem 2a, what is the “system type” of L(s) = G2 (s) D2 (s)? Compute the steadystate gain of the system H2 (s) determined in problem 2c.
2e. Compute the step response of the closed outer-loop system H2 (s), as determined in problem 2c, analytically.
3. What does the step response of a nonminimum phase system look like? For what kind of systems do we expect this kind of
response? Do you expect this behavior in either problem 1e or problem 2e? Discuss.
4a. The sensors you are going to use in this problem [to estimate both θ(t) and φ(t)] are very noisy at high frequencies. Rather
than including the low-pass filtering F1 (s) and F2 (s) necessary to mitigate the effect of this noise directly in the D1 (s) and D2 (s)
blocks, where else might this low-pass filtering be introduced into the SLC block diagram in order to minimize the performance
degradation of the nominal system? [Draw the modified SLC block diagram on your exam, indicating where the low-pass
filtering blocks F1 (s) and F2 (s) might go.] What would you select for the cutoff frequencies ωc of F1 (s) and F2 (s)?
4b. Given the modified SLC block diagram determined in problem 4a, determine the full inner and outer-loop transfer functions
of this modified SLC design, [P H1 (s)] = Θ(s)/Θr (s) and H2 (s) = Φ(s)/Φr (s), in terms of G1 (s), G2 (s), D1 (s), D2 (s), P, F1 (s),
and F2 (s). [That is, do not make the assumption that [P H1 (s)] ≈ 1 when determining H2 (s).]
5. Replot the Bode Plot of G1 (s) D1 (s) that you did in problem 1b in polar co¨ordinates to create the corresponding Nyquist plot
(note: the pole/zero cancellation at the origin may be safely ignored). For small K, does the Nyquist Stability Criterion indicate
stability or instability? How about for large K? Is this consistent with what you see in the root locus plot? Discuss.
6a. Apply the Routh test to the closed inner-loop transfer function H1 (s) determined in problem 1c. Does this test indicate that
the closed inner-loop system is stable?
6b. Redo the Routh test of problem 6a, now taking the gain of the inner-loop controller, K1 , as a variable. Based on this test,
how large must K1 be for the closed inner-loop system to be stable?
6c. It is seen in the root locus of problem 1a that the closed-loop poles moves from the RHP to the LHP through the point s = 0.
Recall that, since 1 + Kb(s)/a(s) = 0 for any point s on a root locus plot for some K, we can deduce that K = −a(s)/b(s) for
any specific point s of interest on a root locus. Using this procedure, recalculate the value of K1 that gives closed-loop stability
of our inner loop system. Does your answer coincide with that determined in problem 6b? Discuss.









© Copyright 2026