
How to find a Khalimsky-continuous approximation of a real-valued function Erik Melin
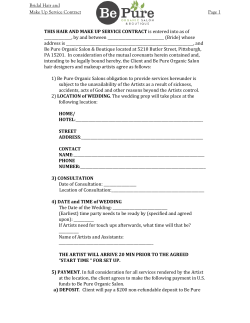
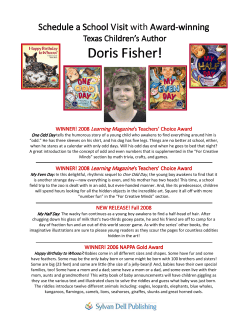
How to find a Khalimsky-continuous approximation of a real-valued function Erik Melin U.U.D.M. Report 2004:38 ISSN 1101–3591 Department of Mathematics Uppsala University How to find a Khalimsky-continuous approximation of a real-valued function Erik Melin Uppsala University, Department of Mathematics Box 480, SE-751 06 Uppsala, Sweden [email protected] http://www.math.uu.se/~melin October 2004 Abstract Given a real-valued continuous function defined on n-dimensional Euclidean space, we construct a Khalimsky-continuous integer-valued approximation. From a geometrical point of view, this digitization takes a hypersurface that is the graph of a function and produces a digital hypersurface—the graph of the digitized function. 1. Introduction and background The increasing use of multi-dimensional images in applications of computer imagery calls for a development of digital geometry in three dimensions and higher. In particular, digital curves, surfaces, planes and other digital counterparts of Euclidean geometrical objects have been extensively studied. Several different approaches have been used in this study. Historically, the first attempts to define digital objects were algorithmic; a digital object was defined to be the result of a given algorithm. We may here mention the works by Bresenham (1965) and Kaufman (1987). One major drawback of this approach is that it may be hard to determine the geometrical properties of the defined objects. To get precise definitions, a more recent approach is to let digital objects be defined by their local properties. This point of view is generally graphtheoretic but is often called topological, although no topology is actually involved. Keywords sometimes used by the advocates of this direction are topological and geometrical consistency; however, from time to time it is a little unclear what these concepts really mean. Much has been written in this field and we have no ambition to provide all significant references. A survey of the field with many references has been written by Kong and Rosenfeld (1989). Concerning digital surfaces a pioneering work is Morgenthaler & 1 Rosenfeld’s (1981) paper. This study was continued by Kim (1984), Rosenfeld et al. (1991), Cohen-Or and Kaufman (1995) and by Chen et al. (1999). A slightly different approach was suggested by Herman (1998). Here, the space consists of voxels and surface elements (surfels) where the surfels alternatively can be thought of as adjacency relations between voxels. A different method of describing linear digital objects is through Diophantine inequalities (Reveill`es 1991). This sort of description is often called arithmetic or analytic. An important aspect of the subject is the problem of finding a digital representation of, say, a surface in R3 . This process is sometimes called discretization and sometimes digitization. There are many ways to perform digitization but a general goal is that the digitized object should preserve characteristic properties of the original object. Straight lines in the plane are naturally of fundamental importance and Rosenfeld (1974) clarified the properties of the grid intersection digitization of straight lines. A new digitization of straight lines in the plane was suggested by Melin (2003a), where the digital lines respect the Khalimsky topology. The present paper treats a generalization of this digitization to higher dimensions. Some advantages of working in a topological space compared to the purely graph-theoretical approach has been discussed by for example Kong, Kopperman & Meyer (1991) and in Kong (2003) it is shown that the Khalimsky topology is in a sense the natural choice. 2. Mathematical background In this section we present a mathematical background for this paper. The first subsection contains some general topology for digital spaces. After that, the two following subsections give an introduction to the Khalimsky topology and to Khalimsky-continuous functions. Some properties of such functions are proved. The mathematical background is concluded by a result on continuous extension which is needed. 2.1. Topology and smallest-neighborhood spaces In any topological space, a finite intersection of open sets is open, whereas the stronger requirement that an arbitrary intersection of open sets be open is not satisfied in general. Alexandrov (1937) considers topological spaces that fulfill the stronger requirement, where arbitrary intersections of open sets are open. Following Kiselman (2002), we will call such spaces smallestneighborhood spaces. Another name that has been used is Alexandrov spaces. Let B be a subset of a topological space X. The closure of B is a very well known notion, and the closure of B usually denoted by B. In this paper, we will instead denote the closure of B in X by CX (B). This allows us to specify in what space we consider the closure and is also a notation dual to 2 NX defined below. The closure of a set is defined to be the intersection of all closed sets containing it. Dually, we define NX (B) to be the intersection of all open sets containing B. In general NX (B) is not an open set, but in a smallest-neighborhood space it is. Clearly NX (B) is the smallest neighborhood of the set B. If there is no danger of ambiguity, we will just write N (B) and C(B) instead of NX (B) and CX (B). If x is a point in X, we define N (x) = N ({x}) and C(x) = C({x}). Note that y ∈ N (x) if and only if x ∈ C(y). We have already remarked that N (x) is the smallest neighborhood of x. Conversely, the existence of a smallest neighborhood around every point implies that an arbitrary intersection of open sets is open; hence this existence could have been used as an alternative definition of a smallest-neighborhood space. A topological space X is called connected if the only sets which are both closed and open are the empty set and X itself. A point x is called open if the set {x} is open, and is called closed if {x} is closed. If a point x is either open or closed it is called pure, otherwise it is called mixed. Two distinct points x and y in X are called adjacent if the subspace {x, y} is connected. It is easy to check that x and y are adjacent if and only y ∈ N (x) or x ∈ N (y). Another equivalent condition is y ∈ N (x) ∪ C(x). The adjacency set in X of a point x, denoted AX (x), is the set of points adjacent to x. Thus we have AX (x) = (NX (x) ∪ CX (x)) r {x}. Often, we just write A(x). A point adjacent to x is called a neighbor of x. This terminology, however, is somewhat dangerous since a neighbor of x need not be in the smallest neighborhood of x. Kolmogorov’s separation axiom, also called the T0 axiom, states that given two distinct points x and y, there is an open set containing one of them but not the other. An equivalent formulation is that N (x) = N (y) implies x = y for every x and y. The T1/2 axiom states that all points are pure. Clearly any T1/2 space is also T0 . Smallest-neighborhood spaces satisfying the T1 axiom must have the discrete topology and are therefore not so interesting. A useful observation is that if X and Y are topological spaces and x ∈ X and y ∈ Y , then NX×Y (x, y) = NX (x) × NY (y) and similarly for the closure. 2.2. The Khalimsky topology We will construct a topology on the digital line, Z, originally introduced by Efim Khalimsky (see Khalimsky, Kopperman & Meyer (1990) and references there). Let us identify with each even integer m the closed, real interval [m − 1/2, m + 1/2] and with each odd integer n the open interval ]n − 1/2, n + 1/2[. These intervals form a partition of the Euclidean line R and we may therefore consider the quotient space. Identifying each interval with the corresponding integer gives us the Khalimsky topology on Z. Since R is connected, the Khalimsky line is connected. It follows readily that an 3 even point is closed and that an odd point is open. In terms of smallest neighborhoods, we have N (m) = {m} if m is odd and N (n) = {n ± 1, n} if n is even. Let a and b, a 6 b, be integers. A Khalimsky interval is an interval [a, b] ∩ Z of integers with the topology induced from the Khalimsky line. We will denote such an interval by [a, b]Z and call a and b its endpoints. A Khalimsky arc in a topological space X is a subspace that is homeomorphic to a Khalimsky interval. If any two points in X are the endpoints of a Khalimsky arc, we say that X is Khalimsky arc-connected. Theorem 1. A T0 smallest-neighborhood space is connected if and only if it is Khalimsky arc-connected. Proof. See for example Theorem 11 of Melin (2004). Slightly weaker is Khalimsky, Kopperman & Meyer’s (1990, Theorem 3.2c) result. On the digital plane, Z2 , the Khalimsky topology is given by the product topology. Points with both coordinates odd are open and points with both coordinates even are closed. These are the pure points in the plane. Points with one odd and one even coordinate are mixed. Let us call a point q such that kq − pk∞ = 1 an l∞ -neighbor of p. We may note that a mixed point p is connected only to its four pure l∞ -neighbors (p1 ± 1, p2 ) and (p1 , p2 ± 1), whereas a pure point p is connected to all eight l∞ -neighbors: (p1 ± 1, p2 ), (p1 , p2 ± 1), (p1 + 1, p2 ± 1) and (p1 − 1, p2 ± 1). More generally, Khalimsky n-space is Zn equipped with product topology. Here, points with all coordinates odd are open and points with all coordinates even are closed. Let Pn denote the set of pure points in Zn . Note that Pn is not a product space: Pn 6= P1n = Zn . Let ON(p) = {x ∈ A(p); x is open} be the set of open neighbors of a point p in Zn and similarly CN(p) = {x ∈ A(p); x is closed} be the set of closed neighbors. The cardinality of a set X is denoted by card(X). If c is the number of even coordinates in p and d is the number of odd coordinates, then card(ON(p)) = 2c and card(CN(p)) = 2d . Define also PN(p) = CN(p) ∪ ON(p) to be the set of all pure neighbors of a point p. A pure point in Zn has always 2n pure neighbors. For mixed points, however, the situation is different. In Z2 every mixed point has 4 pure neighbors. In Z3 a mixed point has 21 + 22 = 6 pure neighbors. But in Z4 a mixed point may have 21 + 23 = 10 or 22 + 22 = 8 pure neighbors. Obviously, the number of possibilities increases even more in higher dimension. These different types of points have different topological properties and may cause the digitization process to become more complex in higher dimension, cf. Remark 20. 4 2.3. Continuous functions Unless otherwise stated we shall assume that Z is equipped with the Khalimsky topology from now on. This makes it meaningful to consider (for example) continuous functions f : Z → Z. Continuous integer-valued functions will sometimes be called Khalimsky-continuous, if we want to stress that a function is not real continuous. We will discuss some properties of such functions; more details can be found in e.g. (Kiselman 2002). Suppose that f is continuous. Since M = {m, m + 1} is connected it follows that f (M ) is connected, but this is the case only if |f (m) − f (m + 1)| 6 1. Hence f is Lipschitz with Lipschitz constant 1; we say f is Lip-1. Lip-1, however, is not sufficient for continuity. If y = f (x) is odd, then U = f −1 ({y}) must be open, so if x is even then x ± 1 ∈ U . This means that f (x ± 1) = f (x). In a more general setting, this generalizes to the following: Proposition 2. Let X be a topological space and f : X → Z be a continuous mapping. Suppose that x0 ∈ X. If f (x0 ) is odd, then f is constant on N (x0 ) and |f (x) − f (x0 )| 6 1 for all x ∈ C(x0 ). If f (x) is even, then f is constant on C(x0 ) and |f (x) − f (x0 )| 6 1 for all x ∈ N (x0 ) Proof. Let y0 = f (x0 ) be odd. Then {y0 } is an open set. Hence f −1 ({y0 }) is open and therefore N (x0 ) ⊂ f −1 ({y0 }), that is, f (N (x0 )) = {y0 }. Moreover, the set A = {y0 , y0 ± 1} is closed. But then the set f −1 (A) is closed also and this implies that f (x) ∈ A for all x ∈ C(x0 ). The even case is dual. Let us define the length of a Khalimsky arc A to be the number of points in A minus one, L(A) = card A − 1. Theorem 1 allows us to define the arc metric on a T0 connected smallest-neighborhood space X to be the length of the shortest arc connecting x and y in X: ρX (x, y) = min(L(A); A ⊂ X is a Khalimsky arc containing x and y). Proposition 3. Let X be a connected, T0 smallest-neighborhood space. If f is a continuous mapping X → Z, then f is Lip-1 for the arc metric. Proof. This is Proposition 15 of Melin (2004). Theorem 4. Let X be a connected, T0 smallest-neighborhood space and consider a family of continuous mappings fj : X → Z, j ∈ J. If the set {fj (a); j ∈ J} is bounded for some a ∈ X, then the mappings f? (x) = inf j∈J fj (x) and f ? (x) = supj∈J fj (a) are continuous. Proof. We first prove that f? and f ? are finite everywhere. Assume the contrary and suppose that there is a sequence of indices jk ∈ J, k = 1, 2, . . . and a point x ∈ X such that fjk (x) → +∞ (for example) as k → ∞. Then also fjk (a) → +∞, contrary to our assumption, since each fj is continuous and therefore, by Proposition 3, Lip-1 for the arc metric. 5 To demonstrate continuity, we have to prove that for each x ∈ X we have NX (x) ⊂ f −1 (NZ (f (x))). Therefore we fix x ∈ X and suppose y ∈ NX (x). Let f? (x) = m and let j ∈ J be an index such that fj (x) = m. We consider two cases separately. The relations that come from Proposition 2 are marked with a †. If m is even, then f? (y) 6 fj (y) 6† m + 1. We may conclude that for any index i ∈ J, we have fi (y) >† m − 1 since x ∈ C(y) and fi (x) > m. But then f (y) ∈ NZ (m) = {m, m ± 1} as required. If m is odd, we still have fi (y) > m − 1 for the same reason as above. But m − 1 is even, so if fi (y) = m − 1, then also fi (x) =† m − 1 < f? (x), which is a contradiction. Finally, note that f? (y) 6 fj (y) =† fj (x). Hence, f? (y) = m ∈ NZ (m) and therefore f? is continuous. Continuity of f ? is proved in the same way. Given a mapping f : X → Y between any two sets, the graph of f is defined by Gf = {(x, f (x)); x ∈ X} ⊂ X × Y . Suppose now that X and Y are topological spaces. It is a general topological fact that if f : X → Y is continuous, then Gf is homeomorphic to X. This means that the graph of a Khalimsky-continuous map f : Zn → Z is homeomorphic to Zn . An intuitive interpretation of this is that the graph has no redundant connectedness and in particular is bubble-free, cf. Andr`es (2003). 2.4. Continuous extension We will find use for a result on continuous extension in Khalimsky spaces, which can be found in Melin (2003b, Theorem 12). To formulate it, we need first the following definition: Definition 5. Let A ⊂ Zn and let f : A → Z be a function. Let x and y be two distinct points in A. If one of the following conditions are fulfilled for some i = 1, 2, . . . , n, 1. |f (x) − f (y)| < |xi − yi | or 2. |f (x) − f (y)| = |xi − yi | and xi ≡ f (x) (mod 2), then we say that the function is strongly Lip-1 with respect to (the points) x and y. If the function is strongly Lip-1 with respect to every pair of distinct points in A then we simply say that f is strongly Lip-1. Theorem 6. Let A ⊂ Zn , and let f : A → Z be any function. Then f can be extended to a continuous function on all of Zn if and only if f is strongly Lip-1. 3. Khalimsky-continuous digitization Let X be a set and Z an arbitrary subset of X. A digitization of X is a mapping D : P(X) → P(Z). Given a subset A ⊂ X, we think of D(A) 6 as a digital representation of A. In this paper, we will mainly be interested in the case when X is the Euclidean space Rn and Z is Zn equipped the Khalimsky topology. Given a digitization D : P(Rn ) → P(Zn ) and a function f : Rn−1 → R, we can define a set-valued mapping (Ds f ) : Zn−1 → P(Z) via the graph of f: (Ds f )(p) = {m ∈ Z; (p, m) ∈ D(Gf )}. We would like to construct a integer-valued mapping from this set-valued mapping. Obviously it may happen that (Ds f )(x) = ∅ for some x, The set of points where this does not occur is of interest, hence we define the digitized domain as the set Dom(Df ) = {p ∈ Zn−1 ; (Ds f )(x) 6= ∅}. (1) We shall also assume from now on that the function and the digitization are such that (Ds f )(x) is a finite set for each x. Under this assumption we may define two integer-valued mappings, namely an upper digitization of f D f : Dom(Df ) → Z, z 7→ max(m ∈ L; (z, m) ∈ D(Gf )) and similarly a lower digitization D f : Dom(Df ) → L, z 7→ min(m ∈ L; (z, m) ∈ D(Gf )). If it happens that D f = D f , we can define the restricted digitization of f at a point as the common value, Df = D f = D f . The digitized domain is in general not equal to all of Zn−1 and therefore the restricted digitization need to be extended in some way. The next task is to define the a digitization (P) that will form the foundation for the remaining parts of this paper. Then the main goal of this section will be to prove Theorem 14 which states that the following algorithm will result in the desired approximation. Algorithm 7. Khalimsky-continuous digitization 1. Apply the pure digitization, P, to the graph of f (see (3)) to obtain the pure points in the digitization of the graph. 2. Extend the obtained function to be defined on all pure points in the domain. This is a local operation, which depends only on Pf in a small neighborhood of each pure point. See Definition 10. 3. Extend the digital function to all of Zn using the formulas of Theorem 14. This is again a local operation. 7 (a) H2 (0) (b) H3 (0) (c) (d) Figure 1: (a) and (b) The sets H2 and H3 . (c) A curve, f (x), that does not intersect U2 but intersects H2 . (d) The upper image shows the result of the digitization with H2 , the lower shows what the result would be if only U2 were used (see Definintion 10 on page 10). Thus the inclusion of the open cube improves the approximation. The first goal is to define a digitization of Rn into Pn , the set of pure points in Zn . Let Un = {x ∈ Rn ; |xi | = 1/2 for i = 1, 2, . . . , n − 1 and xn = 1/2} and define Cn = [ {tx; t ∈ ]−1, 1] }. x∈Un Thus Cn is a cross with 2n arms. Let Hn (0) = Cn ∪ {x ∈ Rn ; kxk∞ < 1/2}, (2) be the union of this cross and an open cube in Rn . This definition is illustrated in Fig. 1. Note that Hn (0) is in fact the open cube together with finitely many (2n−1 ) points added to half of the vertices, i.e., Hn (0) = Un ∪ {x ∈ Rn ; kxk∞ < 1/2}. The reason for us to use (2) as the definition is that from the topological point of view the important fact is that Hn contain all the diagonal arms of Cn . The cube only improves the metric approximation as illustrated in Fig. 1 (c) and (d) and as discussed in Sect. 4. For each p ∈ Pn let Hn (p) = Hn (0) + p be Hn (0) translated by the vector S p. Note that Hn (p) ∩ Hn (q) is empty if p 6= q and that {Hn (p); p ∈ Pn } contains every diagonal grid line of the type {tx+p; t ∈ R} where p ∈ Pn and x is a vector in Un . Note also that if x, y ∈ Hn (p), then −1/2 < xn −pn 6 1/2 and in particular |xn − yn | < 1. Since most of the time, we will consider a fixed dimension n, we shall just write H(p) instead of Hn (p) to simplify notation. Using the set H(p), we define the pure digitization of a subset A ⊂ Rn as: P(A) = {p ∈ Pn ; H(p) ∩ A 6= ∅}. (3) Lemma 8. Suppose that the mapping f : Rn → R is Lip-1 for the l∞ -metric. Then P f = P f so that Pf = P f = P f can be defined. Furthermore, Pf is also Lip-1 for the l∞ -metric in Zn . 8 Proof. Let p ∈ Dom(Pf ) ⊂ Zn and suppose that i, j ∈ Z, i 6= j, are integers such that (p, i) ∈ P(Gf ) and (p, j) ∈ P(Gf ). Then there are x, y ∈ Rn such that (x, f (x)) ∈ H(p, i) and (y, f (y)) ∈ H(p, j). Clearly this implies that kx − yk∞ 6 1. Since (p, i) and (p, j) are pure points, i and j have the same parity and therefore |i − j| > 2. But then it follows that |f (x) − f (y)| > 1 and this contradicts the fact that f is Lip-1. Hence Pf can be defined. For the second part, let p, q ∈ Dom(Pf ) where p 6= q. Define d = kp − qk∞ , i = (Pf )(p) and j = (Pf )(q). Again there are points x, y ∈ Rn−1 such that (x, f (x)) ∈ H(p, i) and (y, f (y)) ∈ H(q, j). We must show that |i − j| 6 d. Since kx − yk∞ 6 d + 1, the Lip-1 assumption gives that |f (x) − f (y)| 6 d + 1. Suppose that |i − j| > d. Since (p, i) and (q, j) are pure points it follows that d ≡ |i − j| (mod 2), and therefore |i − j| > d + 2. But then |f (x) − f (y)| > |i − j| − 1 > d + 2 − 1 = d + 1 > |f (x) − f (y)|, which is contradictory. Clearly, Dom(Pf ) need not be equal to all of Pn . If f = 0 is the zero function, then Dom(Pf ) consists of precisely the closed points in Pn . Note that if p is an open point in Pn , then all its neighbors are closed and therefore in Dom(Pf ). The following lemma shows that this is not a coincidence. Note that only the diagonal gridlines of Cn are used in the proof. Lemma 9. Suppose that f : Rn → R is Lip-1 for the l∞ -metric, and let Pf be its pure digitization. If p ∈ Pn does not belong to Dom(Pf ), then every pure neighbor of p belongs to Dom(Pf ). Furthermore, there is an integer r such that (Pf )(q) = r for every pure neighbor q of p. Proof. Let us say, for definiteness, that p is an open point. Since (p, k) 6∈ P(Gf ) for any (odd) k ∈ Z, there must be an even integer r such that |f (p) − r| < 1. Let q be a pure neighbor of p. This means that q = p + (a1 , a2 , . . . , an ) where |ai | = 1 and that q is closed. The point (q, r) ∈ Pn+1 is closed and we will show that it belongs to the digitized graph. If f (q) = r, then clearly (q, r) ∈ P(Gf ). Suppose f (q) < r (the case f (q) > r is similar). Let ψ : [0, 1] → Rn be the parameterization of the real line segment [p, q] given by ψ(t) = q+t(p−q). In particular we have ψ(0) = q and ψ(1) = p. Now, we define a mapping g : [0, 1] → R by g(t) = f (ψ(t)) − (r − t). Note that g(0) = f (q) − r < 0 and that g(1) = f (p) − r + 1 > 0. Hence there is a ξ such that g(ξ) = 0. Define x = ψ(ξ). By construction, the point (x, f (x)) is on the diagonal grid line between the pure points (q, r) and (p, r − 1), i.e., the line segment {(ψ(t), r − t); t ∈ [0, 1] }. Therefore, either (q, r) or (p, r − 1) belongs to the digitized graph, but (p, r − 1) does not by assumption. Hence q ∈ Dom(Pf ) and (Pf )(q) = r. 9 (a) (b) Figure 2: Khalimsky-continuous digitization in two dimensions. In (a) the pure points in the graph are defined (large squares) and (b) shows the extension of this mapping to all integers. Using this result, we will extend Pf to a mapping defined on all pure points. Let p ∈ Pn r Dom(Pf ). It is easy to see that in fact, with r as in the lemma above, |f (x) − r| 6 1/2 for every x with kx − pk∞ 6 1/2. Therefore, it is reasonable to let the extension take the value r at p. Since f takes the value r at all neighbors of p, by the lemma, it is also clear that this choice results in a function that is strongly Lip-1 in Zn . Note that it is easy to find this r given a function f and a p ∈ Pn ; let r = r(f, p) be the integer r such that (p, r) is mixed and |f (p) − r| 6 1/2. Definition 10. Suppose that f : Rn → R is Lip-1 for the l∞ -metric. Then the pure Khalimsky digitization, Kp f : Pn → Z is defined by: (Pf )(p) if p ∈ Dom(Pf ) (4) (Kp f )(p) = r(f, p) otherwise. Example 11. The Khalimsky line has no mixed points. Therefore, given a Lip-1 function f : R → R, the pure Khalimsky-continuous digitization is a mapping Kp f : Z → Z. This digitization is illustrated in Fig. 2. If f (x) = kx + m where |k| 6 1, then this digitization agrees with the Khalimskycontinuous lines treated in Melin (2003a). Note that the pure digitization of a set is a set of pure points and the pure digitization of a function is a function defined on pure points. The digitization on the mixed points of Zn−1 remains to be defined. The values of a continuous function on the pure points do not determine the whole function uniquely, as the following example in Z2 demonstrates. Example 12. Let f : P2 → {0, 1} ⊂ Z be defined by f (p1 , p2 ) ≡ p1 (mod 2). For each mixed point we can extend f continuously by defining it to be either 0 or 1. Since each point can be treated independently, there are uncountable many different extensions. Confer Remark 20. Definition 13. Let f : Rn → R be Lip-1 for the l∞ -metric. Then the lower Khalimsky digitization, K? f : Zn → Z, is the infimum of all continuous extensions of Kp f . Similarly, the upper Khalimsky digitization, K? f , is the supremum of all continuous extensions of K. 10 By Theorem 4, the lower and upper Khalimsky digitizations are continuous. We will now give an explicit way to calculate them. Suppose f : Rn → R is Lip-1 for the l∞ -metric, and let q be a mixed point. Define the set E(q) by: E(q) = {m ∈ Z; (Kp f ) ∪ {(q, m)} is strongly Lip-1}. The notation (Kp f ) ∪ {(q, m)} is set theoretic and means the extension of (Kp f ) at point q with the value m. Since Kp is strongly Lip-1, Theorem 6 guarantees that E(q) is never the empty set. It is easy to see that it is only necessary to check the strongly Lip-1 condition with respect to the points in the pure neighborhood of q, PN(q). And there are not so many possibilities. Let (Kp f )(PN(q)) ⊂ Z denote the image of this neighborhood. Since the l∞ -distance between two point in a neighborhood is at most two and Kp f is Lip-1, it follows that max(Kp f )(PN(q)) − min(Kp f )(PN(q)) 6 2. (5) Suppose that the difference in (5) equals two. Then the only possible value for a strongly Lip-1 extension of Kp f at q is the mean of these extreme values, since this extension must necessarily be Lip-1. Next, suppose that the difference in (5) equals zero. Since q is not pure, it has at least one closed and one open neighbor. One of these neighbors will fail to match in parity with the value in (Kp f )(PN(p)). Therefore again, the only possible extension at the point q is this value. Finally, suppose the difference in (5) equals one. Then Kf takes both an even and an odd value in the neighborhood of q. If (Kp f ) is even for all points in CN(q) and odd for all points in ON(q), then we have a choice; E(q) consists of these two values. If on the other hand, (Kp f )(p) is odd for some point p ∈ CN(q), then E(q) can contain only this value—and similarly if (Kp f )(p) is even for some point p ∈ ON(q). Since we know that the extension exists, it cannot happen that (Kp f ) is odd for some point in CN(q) and even for some point in ON(p). By Theorem 6, every function Kp f extended at a mixed point q with a value in E(q) can be extended to a continuous function defined on all of Zn . To sum up, we get the following result: Theorem 14. The lower and upper Khalimsky digitizations of a Lip-1 function f : Rn → R can be calculated by the following formulas: (K? f )(x) = ? (K f )(x) = (Kp f )(x) if x ∈ Pn min E(x) otherwise, (6) (Kp f )(x) if x ∈ Pn max E(x) otherwise. (7) 11 12 10 8 6 4 2 0 0 5 y 10 0 5 15 20 20 15 10 x (a) (b) Figure 3: The function f (x, y) = 7 + 52 sin x5 + 2 cos y4 . A continuous picture is showed in (a) and the lower Khalimsky continuous digitization is showed in (b). The black voxels are the pure points in the digitization. Figure 3 shows the result of a Khalimsky-continuous digitization of a function of two variables. We remark that the Khalimsky-continuous digitization is increasing in the following sense: If f and g are Lip-1 mappings f, g : Rn → R and f 6 g, then K? f 6 K? g and K? f 6 K? g. This is straightforward to prove from the definitions. 4. Approximation properties By just using rounding, it is immediate that there is a integer-valued approximation F of a real-valued function f such that |F (x) − f (x)| 6 1/2 for all x in the domain. When we in addition require that the approximation be Khalimsky-continuous, it is reasonable to expect that the approximation property deteriorates. Theorem 15. Let f : Rn → R be Lipschitz for the l∞ -metric with Lipschitz constant α 6 1 and let F : Zn → Z be either the upper or the lower Khalimsky continuous digitization of f . Then |f (p) − F (p)| 6 (1 + 3α)/2 for each p ∈ Zn . Proof. We have to treat different types of points in the digitization separately. First, suppose that p ∈ Zn is pure and let r = F (p). If (p, r) ∈ Zn+1 is pure, then the graph of f must intersect H(p, r) and it follows that |f (p) − F (p)| 6 1/2 + α/2. If instead (p, r) is mixed, then for all x ∈ Rn such that kx − pk∞ 6 1/2 the inequality |f (x) − F (x)| 6 1/2 must hold and of course, in particular, this is true for x = p. Now, let q be a mixed point in Zn . Suppose first that a pure neighbor, p, of q is mapped to a mixed point in the graph, i.e., (q, F (q)) is mixed. This implies F (q) = F (p). Let 12 x = 12 (p + q) be the point halfway between p and q. Then F (q) = F (p) and |f (x) − F (p)| 6 1/2 by the argument above, so that |f (q) − F (q)| 6 |F (q) − F (x)| + |f (q) − f (x)| 6 1 1+α + αkx − qk∞ 6 . 2 2 Next, we consider the case where all pure neighbors of q are mapped to pure points in the graph. There are two sub-cases to consider. Suppose first that the difference in (5) is two so that there are points p1 , p2 ∈ PN(q) such F (p1 ) = r and F (p2 ) = r + 2. Starting at p1 and using an estimation similar to the one above, we obtain f (q) 6 r + 1/2 + 3α/2. If we instead start at p2 , we obtain f (q) > r + 3/2 − 3α/2. By definition, F (q) = r + 1 so we can estimate |F (q) − f (q)| from above and below: f (q) − (r + 1) 6 −1/2 + 3α/2 = (−1 + α)/2 + α 6 α and f (q) − (r + 1) > 1/2 − 3α/2 = (1 − α)/2 − α > −α. Hence |f (q) − F (q)| 6 α. Note that this case can occur only if α > 1/3. Finally, we consider the case when the difference in (5) is one; say that F (p1 ) = r and F (p2 ) = r + 1. Here, there is a difference depending on whether we use the lower or the upper digitization; we may have F (q) = r or F (q) = r + 1. Let us consider the lower digitization, i.e., F (q) = r. Then f (q) − F (q) 6 f (p1 ) + α − r 6 (1 + 3α)/2, (8) and from below we have f (q) − F (q) > f (p2 ) − α − r > (1/2 − α/2) − α = (1 − 3α)/2 > −α, so that |f (q) − F (q)| 6 (1 + 3α)/2 and the proposition is proved. Since α is bounded by 1, we obtain |f (q) − F (q)| 6 2 for any mapping where the Khalimsky digitization is defined. The following example shows that the bound in the theorem is sharp. Example 16. Let f : R2 → R be defined by f (x, y) = min(x + 1, 3 − x). It is easy to check that (Kp f )(0, 0) = (Kp f )(2, 0) = 0 and that (Kp f )(1, 1) = (Kp f )(1, −1) = 1. Thus (K? f )(1, 0) = 0, while f (1, 0) = 2. More generally, for 0 < α 6 1, define a Lip-α mapping as fα (x, y) = min α(x + 21 ) + 21 , α( 52 − x) + 1 2 . We have (Kp fα )(0, 0) = (Kp fα )(2, 0) = 0 and (Kp f )(1, ±1) = 1 as before. Therefore, we again get (K? fα )(1, 0) = 0, while fα (1, 0) = (3α + 1)/2. 13 If one checks the proof of Theorem 15, one sees that it is only in one case that we get the bound (1 + 3α)/2. It is in (8). In the proof, the lower digitization is considered and there we have the bad bound above. If instead one considers the upper digitization, then the bad bound is from below. In all other cases, the bound is α or (1 + α)/2, so in the one-dimensional case we obtain the following corollary, since there are no mixed points in the domain. Corollary 17. Let F be the Khalimsky-continuous digitization of a mapping f : R → R, which is Lip-1. Then |f (p) − F (p)| 6 (1 + α)/2 for each p ∈ Z. In two dimensions, it is also possible to improve the approximation. Since a mixed point in the Khalimsky plane never has a mixed neighbor, we can define the optimal Khalimsky-continuous digitization as follows: (Kf )(x) = (K? f )(x) if |(K? f )(x) − f (x)| < |(K? f )(x) − f (x)| (K? f )(x) otherwise. (9) Corollary 18. Let F be the optimal Khalimsky-continuous digitization of a mapping f : R2 → R which is Lipschitz for the l∞ -metric with Lipschitz constant α 6 1. Then |f (p) − F (p)| 6 (1 + α)/2 for each p ∈ Z2 . The following example shows that in general, the bound (α+1)/2 cannot be improved. It is stated in one dimension, but can clearly be extended to higher dimensions. Example 19. Let 0 6 α 6 1 and define f : R → R, fα (x) = αx + (1 − 3α)/2. Suppose that Fα is a Khalimsky-continuous approximation of fα . Since fα (1) = 1 − (1 + α)/2, it is necessary that Fα (1) = 0, if F is to approximate fα better than Kfα . By continuity, it follows then that F (2) = 0, while fα (2) = (α + 1)/2. Remark 20. The definition of the optimal Khalimsky digitization is utterly dependent on the fact that mixed points in the plane are not connected, and therefore can be treated one by one. In three and more dimensions, this is no longer true. If, for example, we have f : Z3 → Z and define f (1, 0, 0) = 1 then necessarily f (1, 1, 0) = 1 if f is to be continuous. One way out of this is to define an order among the mixed points. We can decide to first define the extension of Kp on the points with precisely two odd coordinates (which are independent) and then on the remaining mixed points. Acknowledgement I am grateful to Christer Kiselman for comments on earlier versions of this manuscript and to Ola Weistrand for letting me use his routines for voxel visualization. 14 References Alexandrov, Paul. 1937. “Diskrete R¨aume.” Mat. Sb. 2(44):501–519. Andr`es, Eric. 2003. “Discrete linear objects in dimension n: the standard model.” Graphical Models 1–3(65):92–111. Bresenham, Jack E. 1965. “Algorithm for computer control of a digital plotter.” IBM Systems Journal 4(1):25–30. Chen, Li, Donald H. Cooley & Jianping Zhang. 1999. “The equivalence between two definitions of digital surfaces.” Inform. Sci. 115(1-4):201– 220. Cohen-Or, Daniel & Arie Kaufman. 1995. “Fundamentals of surface voxelization.” Graphical Models and Image Processing 57(6):453–461. Herman, Gabor T. 1998. Geometry of digital spaces. Applied and Numerical Harmonic Analysis Boston, MA: Birkh¨auser Boston Inc. Kaufman, Arie. 1987. “Efficient algorithms for 3D scan-conversion of parametric curves, surfaces and volumes.” Computer Graphics 21(4):171– 179. Khalimsky, Efim, Ralph Kopperman & Paul R. Meyer. 1990. “Computer graphics and connected topologies on finite ordered sets.” Topology Appl. 36(1):1–17. Kim, Chul E. 1984. “Three-dimensional digital planes.” IEEE Trans. Pattern Anal. Machine Intell. PAMI-6(5):639–645. Kiselman, Christer O. 2002. Digital geometry and mathematical morphology. Lecture notes. Uppsala University. Available at www.math.uu.se/~kiselman. Kong, T. Yung. 2003. “The Khalimsky topologies are precisely those simply connected topologies on Zn whose connected sets include all 2nconnected sets but no (3n − 1)-disconnected sets.” Theoret. Comput. Sci. 305(1-3):221–235. Kong, T. Yung & Azriel Rosenfeld. 1989. “Digital topology: Introduction and survey.” Comput. Vision Graph. Image Process. 48(3):357–393. Kong, T. Yung, Ralph Kopperman & Paul R. Meyer. 1991. “A topological approach to digital topology.” Amer. Math. Monthly 98(10):901–917. Melin, Erik. 2003a. “Digital straight lines in the Khalimsky plane.” (To appear in Mathematica Scandinavica). 15 Melin, Erik. 2003b. Extension of continuous functions in digital spaces with the Khalimsky topology. U.U.D.M. Report 2003:29 Uppsala University. Available at www.math.uu.se/~melin. Melin, Erik. 2004. Continuous extension in topological digital spaces. U.U.D.M. Report 2004:2 Uppsala University. Morgenthaler, David G. & Azriel Rosenfeld. 1981. “Surfaces in threedimensional digital images.” Inform. and Control 51(3):227–247. Reveill`es, Jean-Pierre. 1991. G´eom´etrie discr`ete, calcul en nombres entiers et algorithmique. Ph.D. thesis. Universit´e Louis Pasteur, Strasbourg. Rosenfeld, Azriel. 1974. “Digital straight line segments.” IEEE Trans. Computers C-23(12):1264–1269. Rosenfeld, Azriel, T. Yung Kong & Angela Y. Wu. 1991. “Digital surfaces.” CVGIP: Graph. Models Image Process. 53(4):305–312. 16








© Copyright 2026