
Nonlinear Semidefinite Optimization —why and how— Michal Ko ˇcvara Isaac Newton Institute, 2013
Nonlinear Semidefinite Optimization
—why and how—
Michal Koˇcvara
School of Mathematics, The University of Birmingham
Isaac Newton Institute, 2013
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
1 / 45
Semidefinite programming (SDP)
“generalized” mathematical optimization problem
min f (x)
subject to
g(x) ≥ 0
A(x) 0
A(x) — (non)linear
matrix operator Rn → Sm
P
(A(x) = A0 + xi Ai )
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
2 / 45
SDP notations
Sn . . . symmetric matrices of order n × n
A 0 . . . A positive semidefinite
hA, Bi := Tr(AB). . . inner product on Sn
A[Rn → Sm ]. . . linear matrix operator defined by
A(y) :=
n
X
yi Ai
with Ai ∈ Sm
i=1
A∗ [Sm → Rn ]. . . adjoint operator defined by
A∗ (X ) := [hA1 , X i, . . . , hAn , X i]T
and satisfying
hA∗ (X ), yi = hA(y), X i
ˇ
Michal Kocvara
(University of Birmingham)
for all y ∈ Rn
Isaac Newton Institute, 2013
3 / 45
Linear SDP: primal-dual pair
infhC, X i := Tr(CX )
X
∗
s.t. A (X ) = b
(P)
[hAi , X i = bi , i = 1, . . . , n]
X 0
suphb, yi :=
y ,S
X
bi yi
s.t. A(y) + S = C
(D)
X
[
yi Ai + S = C]
S0
Weak duality: Feasible X , y, S satisfy
hC, X i − hb, yi = hA(y) + S, X i −
X
yi hAi , X i = hS, X i ≥ 0
duality gap nonnegative for feasible points
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
4 / 45
Linear Semidefinite Programming
Vast area of applications. . .
LP and CQP is SDP
eigenvalue optimization
robust programming
control theory
relaxations of integer optimization problems
approximations to combinatorial optimization problems
structural optimization
chemical engineering
machine learning
many many others. . .
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
5 / 45
Why nonlinear SDP?
Problems from
Structural optimization
Control theory
Examples below
There are more but the researchers just don’t know about. . .
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
6 / 45
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
7 / 45
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
8 / 45
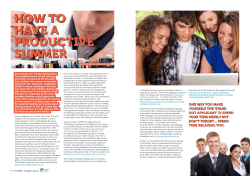
Free Material Optimization
Aim:
Given an amount of material, boundary conditions and external load f ,
find the material (distribution) so that the body is as stiff as possible
under f .
The design variables are the material properties at each point of the
structure.
M. P. Bendsøe, J.M. Guades, R.B. Haber, P. Pedersen and J. E. Taylor:
An analytical model to predict optimal material properties in the context
of optimal structural design. J. Applied Mechanics, 61 (1994) 930–937
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
9 / 45
Free Material Optimization
2
2
1
1
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
9 / 45
FMO primal formulation
FMO problem with vibration/buckling constraint
min
u∈Rn ,E1 ,...,Em
m
X
TrEi
i=1
subject to
Ei 0, ρ ≤ TrEi ≤ ρ,
i = 1, . . . , m
⊤
f u≤C
A(E )u = f
A(E ) + G(E , u) 0
. . . nonlinear, non-convex semidefinite problem
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
10 / 45
Why nonlinear SDP?
Problems from
Structural optimization
Control theory
Examples below
There are more but the researchers just don’t know about. . .
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
11 / 45
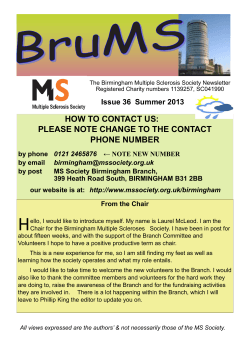
Conic Geometric Programming
Venkat Chandrasekaran’s slides
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
12 / 45
Nonlinear SDP: algorithms, software?
Interior point methods (log det barrier, Jarre ’98), Leibfritz ’02,. . .
Sequential SDP methods (Correa-Ramirez ’04, Jarre-Diehl)
None of these work (well) for practical problems
(Generalized) Augmented Lagrangian methods (Apkarian-Noll
’02–’05, D. Sun, J. Sun ’08, MK-Stingl ’02–)
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
13 / 45
Nonlinear SDP: algorithms, software?
Interior point methods (log det barrier, Jarre ’98), Leibfritz ’02,. . .
Sequential SDP methods (Correa-Ramirez ’04, Jarre-Diehl)
None of these work (well) for practical problems
(Generalized) Augmented Lagrangian methods (Apkarian-Noll
’02–’05, D. Sun, J. Sun ’08, MK-Stingl ’02–)
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
13 / 45
Nonlinear SDP: algorithms, software?
Interior point methods (log det barrier, Jarre ’98), Leibfritz ’02,. . .
Sequential SDP methods (Correa-Ramirez ’04, Jarre-Diehl)
None of these work (well) for practical problems
(Generalized) Augmented Lagrangian methods (Apkarian-Noll
’02–’05, D. Sun, J. Sun ’08, MK-Stingl ’02–)
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
13 / 45
PENNON collection
PENNON (PENalty methods for NONlinear optimization)
a collection of codes for NLP, (linear) SDP and BMI
– one algorithm to rule them all –
READY
PENNLP AMPL, MATLAB, C/Fortran
PENSDP MATLAB/YALMIP, SDPA, C/Fortran
PENBMI MATLAB/YALMIP, C/Fortran
PENNON (NLP + SDP) extended AMPL, MATLAB,
C/FORTRAN
NEW
PENLAB (NLP + SDP) open source MATLAB implementation
IN PROGRESS
PENSOC (nonlinear SOCP) ( + NLP + SDP)
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
14 / 45
PENSDP with an iterative solver
min hC, X i
(P)
X ∈Sm
s.t. hAi , X i = bi , i = 1, . . . , n
X 0
Large n, small m (Kim Toh)
problem
theta12
theta162
n
17979
127600
m
600
800
PENSDP
CPU
27565
mem
PEN-PCG
CPU CG/it
254
8
13197
13
Large m, small/medium n (robust QCQP, Martin Andersen)
problem
rqcqp1
rqcqp2
n
101
101
m
806
3206
ˇ
Michal Kocvara
(University of Birmingham)
PENSDP
CPU
324
6313
PEN-PCG
CPU CG/it
20
4
364
4
Isaac Newton Institute, 2013
15 / 45
PENNON: the problem
Optimization problems with nonlinear objective subject to nonlinear
inequality and equality constraints and semidefinite bound constraints:
min
x∈Rn ,Y1 ∈Sp1 ,...,Yk ∈Spk
subject to
f (x, Y )
gi (x, Y ) ≤ 0,
i = 1, . . . , mg
hi (x, Y ) = 0,
i = 1, . . . , mh
λi I Yi λi I,
i = 1, . . . , k
ˇ
Michal Kocvara
(University of Birmingham)
(NLP-SDP)
Isaac Newton Institute, 2013
16 / 45
The problem
Any nonlinear SDP problem can be formulated as NLP-SDP, using
slack variables and (NLP) equality constraints:
G(X ) 0
write as
G(X ) = S
element-wise
S0
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
17 / 45
The algorithm
Based on penalty/barrier functions ϕg : R → R and ΦP : Sp → Sp :
gi (x) ≤ 0 ⇐⇒ pi ϕg (gi (x)/pi ) ≤ 0,
Z 0 ⇐⇒ ΦP (Z ) 0,
i = 1, . . . , m
p
Z ∈S .
Augmented Lagrangian of (NLP-SDP):
F (x,Y ,u,U,U,p)=f (x,Y )+
P mg
i=1
ui pi ϕg (gi (x,Y )/pi )
P
P
+ ki=1 hU i ,ΦP (λi I−Yi )i+ ki=1 hU i ,ΦP (Yi −λi I)i ;
here u ∈ Rmg and U i , U i are Lagrange multipliers.
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
18 / 45
The algorithm
A generalized Augmented Lagrangian algorithm (based on R. Polyak
’92, Ben-Tal–Zibulevsky ’94, Stingl ’05):
1
Given x 1 , Y 1 , u 1 , U 1 , U ; pi1 > 0, i = 1, . . . , mg and P > 0.
For k = 1, 2, . . . repeat till a stopping criterium is reached:
k
(i)
Find x k +1 and Y k +1 s.t. k∇x F (x k +1 , Y k +1 , u k , U k , U , p k )k ≤ K
(ii)
uik +1 = uik ϕ′g (gi (x k +1 )/pik ),
U ki +1
k +1
Ui
(iii)
=
=
i = 1, . . . , mg
DA ΦP ((λi I − Yi ); U ki ),
k
DA ΦP ((Yi − λi I); U i ),
i = 1, . . . , k
i = 1, . . . , k
pik +1 < pik , i = 1, . . . , mg
P k +1 < P k .
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
19 / 45
Interfaces
How to enter the data – the functions and their derivatives?
Matlab interface
AMPL interface
C/C++ interface
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
20 / 45
Matlab interface
User provides six M ATLAB functions:
f . . . evaluates the objective function
df . . . evaluates the gradient of objective function
hf . . . evaluates the Hessian of objective function
g . . . evaluates the constraints
dg . . . evaluates the gradient of constraints
hg . . . evaluates the Hessian of constraints
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
21 / 45
Matlab interface
Matrix variables are treated as vectors, using the function
svec : Sm → R(m+1)m/2 defined by
a11
svec
sym
a12 . . .
a22 . . .
..
.
a1m
a2m
..
.
amm
= (a11 , a12 , a22 , . . . , a1m , a2m , amm )T
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
22 / 45
Matlab interface
Matrix variables are treated as vectors, using the function
svec : Sm → R(m+1)m/2 defined by
a11
svec
sym
a12 . . .
a22 . . .
..
.
a1m
a2m
..
.
amm
= (a11 , a12 , a22 , . . . , a1m , a2m , amm )T
Keep a specific order of variables, to recognize which are matrices and
which vectors. Add lower/upper bounds on matrix eigenvalues.
Sparse matrices available, sparsity maintained in the user defined
functions.
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
23 / 45
AMPL interface
AMPL does not support SDP variables and constraints. Use the same
trick:
Matrix variables are treated as vectors, using the function
svec : Sm → R(m+1)m/2 defined by
a11
svec
sym
a12 . . .
a22 . . .
..
.
a1m
a2m
..
.
amm
= (a11 , a12 , a22 , . . . , a1m , a2m , amm )T
Need additional input file specifying the matrix sizes and lower/upper
eigenvalue bounds.
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
24 / 45
What’s new
PENNON being implemented in NAG (The Numerical Algorithms
Group) library
The first routines should appear in the NAG Fortran Library, Mark 24
(Autumn 2013)
By-product:
PENLAB — free, open, fully functional version of PENNON coded in
MATLAB
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
25 / 45
PENLAB
PENLAB — free, open source, fully functional version of PENNON
coded in Matlab
Designed and coded by Jan Fiala (NAG)
Open source, all in MATLAB (one MEX function)
The basic algorithm is identical
Some data handling routines not (yet?) implemented
PENLAB runs just as PENNON but is slower
Pre-programmed procedures for
standard NLP (with AMPL input!)
linear SDP (reading SDPA input files)
bilinear SDP (=BMI)
SDP with polynomial MI (PMI)
easy to add more (QP, robust QP, SOF, TTO. . . )
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
26 / 45
PENLAB
The problem
min
x∈Rn ,Y1 ∈Sp1 ,...,Yk ∈Spk
subject to
f (x, Y )
gi (x, Y ) ≤ 0,
i = 1, . . . , mg
hi (x, Y ) = 0,
i = 1, . . . , mh
Ai (x, Y ) 0,
i = 1, . . . , mA
λi I Yi λi I,
i = 1, . . . , k
(NLP-SDP)
Ai (x, Y ). . . nonlinear matrix operators
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
27 / 45
PENLAB
Solving a problem:
prepare a structure penm containing basic problem data
>> prob = penlab(penm); MATLAB class containing all data
>> solve(prob);
results in class prob
The user has to provide MATLAB functions for
function values
gradients
Hessians (for nonlinear functions)
of all f , g, A.
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
28 / 45
Structure penm and f/g/h functions
Example: min x1 + x2
s.t.
x12 + x22 ≤ 1, x1 ≥ −0.5
penm = [];
penm.Nx = 2;
penm.lbx = [-0.5 ; -Inf];
penm.NgNLN = 1;
penm.ubg = [1];
penm.objfun = @(x,Y) deal(x(1) + x(2));
penm.objgrad = @(x,Y) deal([1 ; 1]);
penm.confun = @(x,Y) deal([x(1)ˆ2 + x(2)ˆ2]);
penm.congrad = @(x,Y) deal([2*x(1) ; 2*x(2)]);
penm.conhess = @(x,Y) deal([2 0 ; 0 2]);
% set starting point
penm.xinit = [2,1];
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
29 / 45
PENLAB gives you a free MATLAB solver for large scale NLP!
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
30 / 45
Toy NLP-SDP example 1
min
x∈R2
1 2
(x + x22 )
2 1
subject to
1
x1 − 1 0
x1 − 1
1
x2 0
0
x2
1
D. Noll, 2007
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
31 / 45
Toy NLP-SDP example 2
min x1 x4 (x1 + x2 + x3 ) + x3
x∈R6
subject to
x1 x2 x3 x4 − x5 − 25 = 0
x12 + x22 + x32 + x42 − x6 − 40 = 0
x1
x2
0
0
x2
x4 x2 + x3 0
0
0x2 + x3 x4
x3
0
0
x3
x1
1 ≤ xi ≤ 5, i = 1, 2, 3, 4,
xi ≥ 0, i = 5, 6
Yamashita, Yabe, Harada, 2007
(“augmented” Hock-Schittkowski)
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
32 / 45
Example: nearest correlation matrix
Find a nearest correlation matrix:
min
X
n
X
(Xij − Hij )2
(1)
i,j=1
subject to
Xii = 1,
i = 1, . . . , n
X 0
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
33 / 45
Example: nearest correlation matrix
The condition number of the nearest correlation matrix must be
bounded by κ.
Using the transformation of the variable X :
e =X
zX
The new problem:
min
n
X
eij − Hij )2
(z X
(2)
e
z,X
i,j=1
subject to
eii = 1,
zX
i = 1, . . . , n
e κI
IX
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
34 / 45
Example: nearest correlation matrix
For
X =
1.0000 -0.3775 -0.2230 0.7098 -0.4272
-0.3775 1.0000 0.6930 -0.3155 0.5998
-0.2230 0.6930 1.0000 -0.1546 0.5523
0.7098 -0.3155 -0.1546 1.0000 -0.3857
-0.4272 0.5998 0.5523 -0.3857 1.0000
-0.0704 -0.4218 -0.4914 -0.1294 -0.0576
-0.0704
-0.4218
-0.4914
-0.1294
-0.0576
1.0000
the eigenvalues of the correlation matrix are
eigen =
0.2866
0.2866
0.2867
ˇ
Michal Kocvara
(University of Birmingham)
0.6717
1.6019
2.8664
Isaac Newton Institute, 2013
35 / 45
Example: nearest correlation matrix
Cooperation with Allianz SE, Munich:
Matrices of size up to 3500 × 3500
Code PENCOR:
C code, data in xml format
feasibility analysis
sensitivity analysis w.r.t. bounds on matrix elements
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
36 / 45
NLP with AMPL input
Pre-programmed. All you need to do:
>> penm=nlp_define(’datafiles/chain100.nl’);
>> prob=penlab(penm);
>> prob.solve();
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
37 / 45
NLP with AMPL input
problem
vars
constr.
chain800
pinene400
channel800
torsion100
lane emd10
dirichlet10
henon10
minsurf100
gasoil400
duct15
marine400
steering800
methanol400
3199
8000
6398
5000
4811
4491
2701
5000
4001
2895
6415
3999
4802
2400
7995
6398
10000
21
21
21
5000
3998
8601
6392
3200
4797
ˇ
Michal Kocvara
(University of Birmingham)
constr.
type
=
=
=
≤
≤
≤
≤
box
=&b
=&≤
≤&b
≤&b
≤&b
PENNON
sec
iter.
1
14/23
1
7/7
3
3/3
1
17/17
217
30/86
151
33/71
57 49/128
1
20/20
3
34/34
6
19/19
2
39/39
1
9/9
2
24/24
PENLAB
sec
iter.
6
24/56
11
17/17
1
3/3
17
26/26
64
25/49
73
32/68
63
76/158
97 203/203
13
59/71
9
11/11
22
35/35
7
19/40
16
47/67
Isaac Newton Institute, 2013
38 / 45
Linear SDP with SDPA input
Pre-programmed. All you need to do:
>>
>>
>>
>>
sdpdata=readsdpa(’datafiles/arch0.dat-s’);
penm=sdp_define(sdpdata);
prob=penlab(penm);
prob.solve();
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
39 / 45
Bilinear matrix inequalities (BMI)
Pre-programmed. All you need to do:
>>
>>
>>
>>
bmidata=define_my_problem; %matrices A, K, ...
penm=bmi_define(bmidata);
prob=penlab(penm);
prob.solve();
min c T x
x∈Rn
s.t.
Ai0
+
n
X
k =1
xk Aik
+
n X
n
X
xk xℓ Kki ℓ < 0,
i = 1, . . . , m
k =1 ℓ=1
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
40 / 45
Polynomial matrix inequalities (PMI)
Pre-programmed. All you need to do:
>>
>>
>>
>>
load datafiles/example_pmidata;
penm = pmi_define(pmidata);
problem = penlab(penm);
problem.solve();
1 T
x Hx + c T x
x∈R 2
subject to blow ≤ Bx ≤ bup
minn
Ai (x) < 0,
with
A(x) =
X
i = 1, . . . , m
xκ(i) Qi
i
where κ(i) is a multi-index with possibly repeated entries and xκ(i) is a
product of elements with indices in κ(i).
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
41 / 45
Other pre-programmed modules
Nearest correlation matrix
Truss topology optimization (stability constraints)
Static output feedback (input from COMPlib, formulated as PMI)
Robust QP
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
42 / 45
Example:
Robust quadratic programming on unit simplex with constrained
uncertainty set
Nominal QP
minn [x T Ax − b T x] s.t.
x∈R
X
x ≤ 1, x ≥ 0
Assume A uncertain: A ∈ U := {A0 + εU, σ(U) ≤ 1}
Robust QP
minn max [x T Ax − b T x] s.t.
x∈R A∈U
X
x ≤ 1, x ≥ 0
equivalent to
minn [x T (A0 ± εI)x − b T x] s.t.
x∈R
ˇ
Michal Kocvara
(University of Birmingham)
X
x ≤ 1, x ≥ 0
Isaac Newton Institute, 2013
43 / 45
Example: Robust QP
Optimal solution: x ∗ , A∗ = A0 + εU ∗ (non-unique)
Constraint: A∗ should share some properties with A0
For instance: A∗ 0 and (A0 )ii = A∗ii = 1, i.e., Uii∗ = 0 for all i
=⇒ then the above equivalence no longer holds
b to the maximization
Remedy: for a given x ∗ find a feasible solution A
problem. This is a linear SDP:
max [x ∗T (A0 + εU)x ∗ − b T x ∗ ]
U∈Sm
s.t.
−I 4U 4I
A0 + εU 0
Uii = 0, i = 1, . . . , m
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
44 / 45
Example: Robust QP
b nearest to A∗ → nonlinear SDP
Alternatively: find feasible A
b
Finally, we need to solve the original QP with the feasible worst-case A
to get a feasible robust solution xrob :
X
b − b T x] s.t.
x ≤ 1, x ≥ 0
minn [x T Ax
x∈R
The whole procedure
solve QP with A = A0 (nominal)
solve QP with A = A0 + εI (robust)
b
solve (non-)linear SDP to get A
b (robust feasible)
solve QP with A
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
45 / 45
NL-SDP, Other Applications, Availability
polynomial matrix inequalities (with Didier Henrion)
nearest correlation matrix
sensor network localization
approximation by nonnegative splines
financial mathematics (with Ralf Werner)
Mathematical Programming with Equilibrium Constraints (with
Danny Ralph)
structural optimization with matrix variables and nonlinear matrix
constraints (PLATO-N EU FP6 project)
approximation of arrival rate function of a non-homogeneous
Poisson process (F. Alizadeh, J. Eckstein)
Many other applications. . . . . . any hint welcome
Free academic version of the code PENNON available
PENLAB available for download from NAG website
ˇ
Michal Kocvara
(University of Birmingham)
Isaac Newton Institute, 2013
46 / 45


© Copyright 2026