
Document 275624
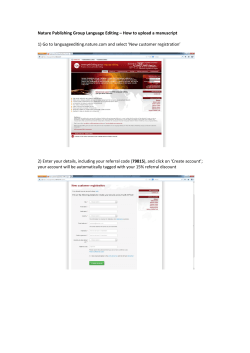
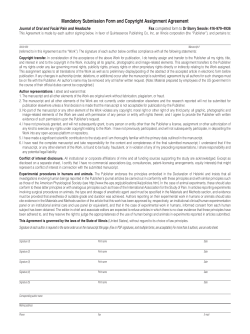
Hindawi Publishing Corporation EURASIP Journal on Bioinformatics and Systems Biology Volume 2008, Article ID 297945, 8 pages doi:10.1155/2008/297945 Research Article Which Is Better: Holdout or Full-Sample Classifier Design? Marcel Brun,1 Qian Xu,2 and Edward R. Dougherty1, 2 1 Computational 2 Department Biology Division, Translational Genomics Research Institute, Phoenix, AZ 85004, USA of Electrical and Computer Engineering, Texas A&M University, College Station, TX 77843, USA Correspondence should be addressed to Edward R. Dougherty, [email protected] Received 26 March 2007; Revised 17 September 2007; Accepted 2 December 2007 Recommended by Yufei Huang Is it better to design a classifier and estimate its error on the full sample or to design a classifier on a training subset and estimate its error on the holdout test subset? Full-sample design provides the better classifier; nevertheless, one might choose holdout with the hope of better error estimation. A conservative criterion to decide the best course is to aim at a classifier whose error is less than a given bound. Then the choice between full-sample and holdout designs depends on which possesses the smaller expected bound. Using this criterion, we examine the choice between holdout and several full-sample error estimators using covariance models and a patient-data model. Full-sample design consistently outperforms holdout design. The relation between the two designs is revealed via a decomposition of the expected bound into the sum of the expected true error and the expected conditional standard deviation of the true error. Copyright © 2008 Marcel Brun et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. 1. Introduction In most microarray-based classification studies, the number of data points (microarrays) is very small (under 100) and one has no choice but to use the full cohort of data for both training and testing (error estimation). One must choose among error estimators for which the full sample is used for training. In small-sample situations, these estimators usually suffer from either low bias (resubstitution) or high variance (cross-validation) [1, 2]. Studies indicate that either bootstrap [3] or bolstering [4] tend to provide better estimation. But what happens when samples sizes are not so small, a situation that will become more common as technology improves? Then, rather than using full-sample design and estimation, one has the option of holding out data from the design and using the holdout data for estimating the error of the classifier designed on the data not held out. Based upon colloquial discussions, it appears that some people prefer to hold out data except for very small samples, thereby splitting the sample into training and testing data; however, these discussions usually lack any precise statistical justification. On the other hand, when discussing holding out test data to estimate the error of a designed classifier, Devroye et al. state [5], “A serious problem concerning the practical applicability of the [hold-out] estimate introduced above is that it requires a large, independent testing sequence. In practice, however, an additional sample is rarely available. One usually wants to incorporate all available [sample points] (Xi , Yi ) pairs in the decision function.” When made by premier pattern-recognition researchers such as L. Devroye, L. Gyorfi, and G. Lugosi, such a statement should give pause to anyone taking a counter position. The holdout issue arises because, even though we are assured of a smaller true error using full-sample design, we desire a satisfactory estimate of the error. The salient word in the Devroye et al. quote [5] is “rarely.” Reasoning in a hyperbolic extreme, if there were an infinite amount of data, it could be split into infinite training and test data sets and this would constitute one of the rare cases. But why do so? For many popular fullsample error estimators, the mean-square error between the estimated and true errors goes to 0 as the sample size tends to infinity. For instance, for the histogram rule with q cells, the resubstitution estimator is low biased; nevertheless, it εn − εn |2 ] ≤ 6q/n, where εn and εn are satisfies the bound E[| the estimated and true errors, respectively [5]. In the other direction, if one has only 50 sample points, then clearly one does not want to hold out data from training. But what is the preferred course of action in moderate cases. Since these are not rare, are we to conclude from the Devroye et al. statement 2 that even in these one should not hold out data for error estimation? Let us motivate the issue with an illustration of the kind of pathology that can afflict holdout error estimation. Suppose that one randomly splits the available data in the sample, S, into training and test data samples, say Strain and Stest , respectively. Let ψsamp and φtrain be the classifiers trained on S and Strain , respectively. Now suppose that S provides a faithful sampling of the feature-label distribution, at least to the extent possible given the size of the sample; however, owing to chance in the splitting process, Strain and Stest represent different parts of the feature-label distribution. Since S provides a representative sample, ψsamp should provide good classification and this will likely be reflected in its estimated error based on S. On the other hand, φtrain may or may not provide good classification, depending on how well Strain reflects the feature-label distribution, but in either event, its estimated error will likely indicate poor performance because the estimate will be done on data significantly different from the training data. Splitting the data has had two undesirable effects: poorer design and poorer error estimation. The latter effect is pernicious: one has the data to design a good classifier, and indeed may even do so, but gets a high test-data error and mistakenly walks away with nothing. One might argue that, owing to the high variance associated with many full-sample error estimators, it is more conservative, and thus safer, to split the data. But even if we desire conservativeness, this argument requires refinement. The empirical test-data error estimator also has variance, which is substantial for small test-data sets. Hence, to be meaningful, the conservative holdout argument requires a specification of the proportion of data to be held out. Stating the matter quantitatively, given a sample Sn of size n, is it better to design a classifier and estimate its error on the full sample Sn or take a holdout approach by designing on a training subset Sm of size m and testing on a disjoint subset Sr of size r, where m + r = n? Letting ψn and φm denote the classifiers designed using full-sample and holdout, respectively, then the expected error of ψn on the full feature-label distribution is less than the expected error of φm on the full feature-label distribution: E[ε[ψn ]] < E[ε[φm ]], where ε[•] denotes classifier error. Were we able to compute the true error of a designed classifier, there would be no issue: design on the full sample. In practice, this error must be estimated and therefore we must concern ourselves with the relation between the error estimates εsamp [ψn ] and εtest [φm ] for ε[ψ n ] and ε[φm ], respectively, where εsamp [ψn ] is obtained by some full-sample method and εtest [φm ] is the error rate of φm on the test data. If εsamp [ψn ] is approximately unbiased, meaning that E[εsamp [ψn ]] ≈ E[ε[ψn ]], then since εtest [φm ] is unbiased, on average the full-sample-and test-sample-based estimators agree with the true errors of the classifiers they are estimating; however, if one of the estimators has a much greater variance than the other, say, the variance of εsamp is large in comparison to εtest , then we have greater confidence in the estimated error of a particular training-data designed classifier than the error of the corresponding particular fullsample designed classifier. Since holding out a significant EURASIP Journal on Bioinformatics and Systems Biology amount of data usually means that Var[εtest ] < Var[εsamp ], it is common to trust the holdout estimate over the full-sample estimate. This conservative approach has a price, that being poorer performing classifiers. To get at the key practical dilemma facing holdout design, consider a situation in which one has 200 data points and wishes to split the data into training and test sets. With n = 200 given, how is one to choose m? Unless this question is to be answered in an ad hoc manner, there needs to be a criterion. A very conservative way to proceed is to take a minimax approach and choose m so as to minimize the maximum variance of the estimator. While certainly rigorous, this minimax criterion leads to the decision m = 2: the training data consists of one point from each class and the resulting classifier is tested on the n − 2 points held out. No one would opt for this minimax criterion on the variance because the expected error of the designed classifier would be very large. One would have an excellent error estimate for a useless classifier. To unravel the problem of choosing between full-sample and holdout design, we must consider what we are trying to accomplish. Assuming that we are using an approximately unbiased full-sample estimator, a simplistic view of the matter is that we use full-sample design if the main goal is a better classifier and holdout if the main goal is better error estimation. Such a methodological choice is dependent on the properties of the design-test process, not on the result of a particular design. It is certainly possible that for a given sample, ε[ψ n ] > ε[φm ] or that |εsamp [ψn ] − ε[ψn ]| < |εtest [φm ] − ε[φm ]|. These relations cannot be known from the sample at hand. One chooses the holdout error estimator because (for sufficiently large r) its expected absolute (or square) deviation from the true error is less than the expected absolute (or square) deviation of full-sample error estimator from the true error, E εtest ψn − ε[ψn < E εsamp φm − ε[φm . (1) But this relation alone does not provide a good criterion for making the choice since, in analogy with the minimax approach to holdout, the inequality can best be achieved by letting m = 2. We are in the conundrum because the criterion of the choice, either better classifier design or better error estimation, is wrong. We want good classifier design and good error estimation, so the choice should be based on a criterion that takes the full process, design and error estimation, into account, not just one or the other. In proposing a criterion, we take the conservative perspective that we want a classifier whose error is not too large, below some tolerance bound. Given random sampling, at best we can have some confidence, say 95%, that a bound is satisfied. This calls for specifying (1 − α)% one-sided confidence intervals for the true errors ε[ψn ] and ε[φm ] based on the estimates εsamp [ψn ] = υ and εtest [φm ] = ω, respectively. This gives rise to two conditional confidence intervals, a (1−α)% conditional confidence interval [0, εnα (υ)] for the true error ε[ψn ] of the full-sample designed classifier, where P ε ψn < εnα (υ) εsamp [ψn ] = υ = 1 − α (2) EURASIP Journal on Bioinformatics and Systems Biology α (ω)] and a (1 − α)% conditional confidence interval [0, εn,m for the true error ε[φm ] of the training-sample designed classifier, where α P ε[φm ] < εn,m (ω)]εtest φm = ω = 1 − α. (3) Whereas the estimates themselves contain no information regarding their imprecision, the confidence intervals do. Since we have equal confidence in both intervals, [0, εnα (υ)] α (ω)], the better classifier is the one possessing and [0, εn,m the smaller confidence bound. Under this criterion, the choice between full-sample and holdout design becomes a choice as to which is smaller, εnα (υ) = εnα (εsamp [ψn ]) or α (ω) = εα (εtest [φ ]) . εn,m m n,m To obtain a proper criterion, the estimators must take into account the dependence of the designed classifiers on the random samples, not simply a particular sample. Hence, our real interest is in comparing E[εnα (εsamp [ψn ])] α (εtest [φ ])], where the expectations are taken and E[εn,m m with respect to the appropriate spaces of samples. These expectations can be expressed as Msamp n,α α = E εn ε samp [ψn ] α test Mtest φm m,α = E εn,m ε = ∞ = 0 εnα (υ) fsamp (υ)dυ, ∞ 0 α εn,m (υ) ftest (υ)dυ, (4) 3 whereby the classes are represented in each fold by the same proportion as in the original data. For the computation of the B632 estimator we use a technique called balanced bootstrap resampling [6], where each sample point is made to appear 50 times in the computation. For bolstering estimators, 10 Monte Carlo samples are used for each bolstering kernel. 2.1. Model-Based Simulation Simulated data consists in n points of dimension D = 10, 25, 50, 100, generated randomly from three different twoclasses models: Linear Model (0) The class-conditional distributions fX0 (x) and fX1 (x) of the points x = (x1 , . . . , xD ) for classes S0 and S1 , respectively, are Gaussian with identical covariance matrices Σ0 = Σ1 = Σ (the structure of Σ to be specified) and means μ0 = (0, 0, . . . , 0) and μ1 = (1, 1, . . . , 1): fXi (x) = 1 (2π)D/2 |Σi |1/2 exp (5) where fsamp and ftest are the densities for the estimation values εsamp [ψn ] and εtest [φm ], respectively, and we use υ in both integrals because in this context it is a dummy variable. M is used to denote a mean because E[εnα (εsamp [ψn ])] and α (εtest [φ ])] are the means of the bounds εα and εα , E[εn,m m n n,m respectively. Given that a full-sample error estimator is close to being unbiased, the criterion is to choose full-sample design if and test only if Msamp n,α < Mm,α , where the decision depends on n, m, and the full-sample estimator (as well as the classification rule and feature-label distribution). As we will see in the examples, it does not appear that the relation is sensitive to the choice of m. We emphasize that we only apply the confidence-bound criterion when the error estimator is not strongly biased. In particular, we will not apply it when using resubstitution because we wish to avoid situations in which we expect that the error estimate is low; indeed, the criterion is reasonable precisely because it incorporates variance information to discriminate between approximately unbiased estimators. 2. Systems and Methods Using simulations we will compare Msamp and Mtest n,α m,α for several data models and classification rules. The classification rules used are 3-nearest neighbor (kNN), linear discriminant analysis (LDA), quadratic discriminant analysis (QDA), and Gaussian Kernel (Kernel). The estimators considered are leave-one-out cross validation (Loo), 5-fold cross-validation with 20 replications (CV), 0.632-bootstrap (B632), bolstered resubstitution (Bolster), and semi-bolstered resubstitution (S-Bolster) [4]. For the computation of CV we use stratified cross-validation, − t 1 x − μi Σi−1 x − μi , 2 i = 0, 1. (6) The Bayes classifier is linear and its decision boundary is a hyperplane. Nonlinear Model (1) This is similar to the previous model, but the covariance matrices differ by a scaling factor such that λΣ0 = Σ1 = Σ. Throughout the study we use λ = 2. The Bayes classifier is nonlinear and its decision boundary is quadratic. Bimodal Model (2) The class-conditional distribution of class S0 is Gaussian with mean μ0 = (0, 0, . . . , 0) and the class-conditional distribution of class S1 is a mixture of two equiprobable Gaussians, fX1 (x) = 1 1 A f (x) + fXB (x), 2 X 2 (7) where fXA (x) and fXB (x) are defined by (6), with means at μA = (1, 1, . . . , 1) and μB = (−1, −1, . . . , −1), respectively. All of the Gaussians possess identical covariance matrices, Σ0 = ΣA = ΣB = Σ. As in a number of other studies [7–10], we use a block structure for the covariance matrices that models a feature set partitioned so that the features in a partition are correlated and features in different partitions are uncorrelated. All features have common variance, so that the D diagonal elements have identical value σ 2 . To set the correlations between features, the D features are equally divided into G groups, with each group having K = D/G features. Possible values of G are G = 2, 5, 10. Features from different groups are uncorrelated and features from the same group possess the same correlation ρ. When G = D, all the features are 4 uncorrelated. Values of G = 2, 5, 10, and ρ = 0, 1/8, 1/4, 1/2 are used in the simulations, varying the amount of confusion and redundancy between the variables. An special case is considered when using feature selection, being nF the number of features the classifier will use. The values used are nF = 5 or nF = 10. When nF = D there is no feature selection. Otherwise, there is feature selection, and the error is estimated using the design described in [11] to avoid bias introduced by the feature selection process. In each case, the best features were obtained by applying statistical t-test and selecting the features with the lowest pvalue. Rather than considering a covariance matrix with a fixed value σ 2 , for which the Bayes error will also be fixed, we can let σ 2 vary, thereby letting the Bayes error vary, thereby emulating the practical situation in which methods are applied to classification problems of varying difficulty. To do this, we assume that the Bayes error can be any value between 0 and 0.25 and that it obeys a Beta distribution B(a, b). The expected Bayes error is 0.25 × a/(a + b). In our simulation, we use the values a = 1, 2, 4 and b = 1, 4. These generate six pairs (a, b) and the corresponding expected Bayes errors εa,b : ε1,1 = 0.125, ε2,1 = 0.167, ε4,1 = 0.200, ε1,4 = 0.050, ε2,4 = 0.083, ε4,4 = 0.125. To simulate models with specified Bayes errors, a table of the Bayes error for each value of D, covariance matrix structure, and variance σ 2 is constructed using Monte Carlo simulations, assuming no feature selection. Six sets of simulations, or experiments, are used to analyze the performance of the holdout approach against full-sample approaches. Each experiment is used to compare the expected bounds across different conditions: experiment A tests all the classification rules listed in Section 2; experiment B1 tests a combination of different models and different values for the parameter ρ; experiment B2 tests a combination of different values for both a and b; experiment B3 tests a combination of different models and different number of groups G; experiment B4 studies the influence of the partition size on the error rates; and experiment C studies the influence of feature selection. Table 1 shows the parameters used for the six experiments. In all cases we use a fixed sample size n = 200. Additional results and experiments are available at http://www .ece.tamu.edu/∼edward/holdout. 2.2. Patient Data In addition to the covariance models, we consider a model based on a microarray classification study. The microarrays were prepared with RNA from 295 breast cancer patients [12]. Using a previously established 70-gene prognosis profile [13], a prognosis signature based on gene-expression was proposed that correlates well with patient survival data and other existing clinical measures. Of the 295 microarrays, 115 belong to the “good prognosis” class (label 1) and the remaining 180 belong to the “poor prognosis” class (label 0). Each data point is a 70-expression vector corresponding to a single microarray, with expression values being log intensity. The best 2-gene sets for linear classification (LDA) were obtained using a full search [14] and have been selected for EURASIP Journal on Bioinformatics and Systems Biology 1800 1600 1400 1200 1000 800 600 400 200 0 100 80 60 40 20 0 0 20 40 60 80 100 Figure 1: Marginal distributions for the two classes. this analysis. The data are available at the supplementary data web page cited in [14]. From the data, we generate a Gaussian distribution at each of the 295 points, with the variances computed for each class using the method in [4]. These are combined according to class to produce two conditional distributions (Figure 1). For each feature set, we select m = 100 training points for holdout, leaving r = 100 points for the holdout testing. To achieve good full-sample error estimation, bolstered resubstitution is done over the n = 200 sample points. We use more than 1 000 000 sample points from the distribution to accurately estimate the true error. The procedure is replicated 10 000 times. 2.3. Estimation The expectations in (4) and (5) are estimated from sample data drawn from the previously defined models. A sample point consists of a feature vector X ∈ R p and a label Y ∈ {0, 1}, the pairs (X, Y ) possessing a joint distribution F. A sample Sn of size n is split into a training set Sm of m independent observations and test set Sr of r independent observations. A classification rule g maps a dataset S into a designed classifier: g(S, ·) : R p →{0, 1}. The true error of a designed classifier g(S, ·) is its error rate for the joint distribution F: ε g(S, ·) = P g(S, X) = / Y = EF Y − g(S, X) . (8) The true error is estimated using a large additional dataset (above 2000 samples) sampled from the distribution F. The simulation first generates the Bayes error given the Beta distribution and the value of the variance σ 2 is taken from a table of Bayes error versus variance. A set Sn of size n = 200 is drawn from the feature-label distribution F and split in two sets Sm and Sr for the holdout analysis. Each classification rule g (and the feature selection algorithm, when needed) is applied to both Sn and Sm to obtain the classifiers ψn = g(Sn , ·) and φm = g(Sm , ·) (and the list of selected features when FS is applied). These classifiers are applied to 2000 test points independently sampled from EURASIP Journal on Bioinformatics and Systems Biology 5 Table 1: List of experiments and their parameters: a and b are the parameters of the Beta distribution used for the Bayes error, G is the number of groups, Alg. is the classification algorithm, Model is the two-classes model, ρ is the correlation for features in the same group, m is the number of training samples, D is the number of features, and nF is the number of features used by the classifier. Ex p a b G A 1 1 2 Alg. kNN LDA QDA Kernel Model ρ m (D, nF) 1 0.125 100 (10,10) 0 0.125 0.25 0.5 100 (10,10) B1 1 1 2 kNN 0 1 2 B2 1 2 4 1 4 2 kNN 1 0.125 100 (10,10) B3 1 1 2 5 kNN 0 1 2 0.125 100 (10,10) 0.125 20 40 .. . 160 180 (10,10) 100 (10, 10) (10, 5) (25, 5) (50, 5) (100, 5) B4 C 1 1 1 1 2 5 kNN 1 LDA 0.125 Alg = kNN-bootstrap 632 1 0.8 0.6 0.4 0.2 0 0 0.1 0.2 r ro er ue Tr F and the average error rates are used as the true errors εn = ε[ψn ] and εm = ε[φm ]. Holdout error estimation is accomplished by applying the classifier φm to the holdout sample Sr to obtain the holdout estimated error εm = εtest [φm ] as the proportion of errors φm makes on Sr . Fullsample error estimation for each method is evaluated using the whole set Sn to obtain the estimated error εn = εsamp [ψn ]. When feature selection is used, each classifier design involves feature selection. For resampling techniques it involves an additional cost for the process, since FS is applied to each iteration. This procedure is repeated N = 1, 000, 000 times (25, 000 times for experiment C) to obtain N pairs (εm , εm ) and (εn , εn ), which provide tight approximations to the joint distributions Fεm ,εm and Fεn ,εn . From these we compute the α = εα (ε ) and (1 − α)% upper-confidence bounds εm n,m m α α εn = εn (εn ), and from these the expected upper-confidence α = E[εnα ] and Mtest bounds Msamp n,α m,α = E[εm ], where the expectations are relative to the distributions of the estimated errors εn and εm , respectively. Figure 2 shows an example of the estimated joint distribution Fεn ,εn for (ε[ψ n ], εn [ψn ]) of the true and full-sample estimated errors when ψn is based on kNN and the error estimation is .632 bootstrap. The solid line in the figure represents the upper bound for the 95% confidence interval, 1 0.3 0.4 0.5 0.4 0.2 0.3 or d te err Estima 0.1 0 Figure 2: Examples of joint distribution between true error and estimated error. The black line shows the threshold εnα (υ) as function of the estimated error υ. defined by εnα (υ), α = 0.05, as a function of the estimated error υ = εn . Equations (2) and (3) define the expected values of this upper bound when using full-sample and holdout error estimation, respectively. 6 EURASIP Journal on Bioinformatics and Systems Biology Model = 2, ρ = 0.5 Model = 2, ρ = 0.25 Model = 2, ρ = 0.125 Model = 2, ρ = 0 Model = 1, ρ = 0.5 Model = 1, ρ = 0.25 Model = 1, ρ = 0.125 Model = 1, ρ = 0 Model = 0, ρ = 0.5 Model = 0, ρ = 0.25 Model = 0, ρ = 0.125 Model = 0, ρ = 0 Alg = Ker Alg = QDA Alg = LDA Alg = kNN 0 0.1 0.2 0.3 0 (a) 0.1 0.2 0.3 0.1 0.2 0.3 (b) Model = 2, G = 10 Model = 1, G = 10 a = 4, b = 4 a = 4, b = 2 a = 4, b = 1 a = 2, b = 4 a = 2, b = 2 a = 2, b = 1 a = 1, b = 4 a = 1, b = 2 a = 1, b = 1 Model = 0, G = 10 Model = 2, G = 5 Model = 1, G = 5 Model = 0, G = 5 Model = 2, G = 2 Model = 1, G = 2 Model = 0, G = 2 0 0.1 0.2 0.3 0.4 0 (c) (d) Train = 20, test = 180 Train = 40, test = 160 Train = 60, test = 140 Train = 80, test = 120 Dim = 100, nF = 5 Train = 100, test = 100 Dim = 50, nF = 5 Train = 120, test = 80 Train = 140, test = 60 Dim = 25, nF = 5 Train = 160, test = 40 Dim = 10, nF = 5 Train = 180, test = 20 Dim = 10, nF = 10 0 0.1 Hold-out Loo CV 0.2 0.3 B632 Bolster S-Bolster (e) 0 0.1 0.2 0.3 0.4 0.5 Hold-out Loo CV B632 Bolster S-Bolster (f) Figure 3: Expected 95% bounds for true error for experiments A, B1, B2, B3, B4, and C ((a) to (f), resp.). 3. Results and Discussion 3.1. Quantitative Results The model-based experimental results are displayed in Figure 3, parts (a) through (f) corresponding to experiments A through C, respectively, with the bars giving the expected 95% confidence bounds for the true errors. Tables available at http://www.ece.tamu.edu/∼edward/ holdout. provide the actual numerical values. In all cases, holdout error estimation has the highest expected 95% bound, meaning that holdout error estimator is outperformed by the full-sample error estimators. Among the latter, leave-one-out cross-validation generally performs the worst. Confidence bound graphs for the patient data are shown in Figure 4. The full-training method yields lower bounds than does the holdout. The expected 95% bounds for the EURASIP Journal on Bioinformatics and Systems Biology If we now take the expectation with respect to εest , we obtain 0.235 Mα = Eest εα |εest = Eest σ ε|εest zα + Eest E ε|εest . 0.23 95 % confidence bound 7 (13) 0.225 Finally, since Eest [E[ε|εest ]] = E[ε], we obtain 0.22 Mα = Eest σ ε|εest zα + E[ε]. 0.215 Equation (14) quantifies the dichotomy between opting for better error estimation or better actual performance. Rather than using (4) and (5), we can express Msamp n,α and Mtest m,α via (14). To do so, let εn and εn denote the error and estimated error using full-sample design, and let εm and εm denote the error and estimated error using holdout design.Then, according to (14), 0.21 0.205 0.2 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 Estimated error Mtest m,α Figure 4: 95% bounds for true error for patient data. true error are 0.216 and 0.207 for holdout and bolstered resubstitution, respectively. 3.2. Analysis Holdout forces one to make a choice between low variance and good performance, and this turns out to be a classical “dammed if you do, dammed if you do not” decision. This conundrum can be analytically expressed if we assume that, given the estimated error, the true error is normally distributed. Letting ε and εest denote the true and estimate errors, without regard to the design and testing procedures, the equation for the confidence bound becomes P ε < εα |εest = 1 − α, (9) where εα denotes the bound for the 1 − α conditional confidence interval. This expression can be written as P ε|εest < εα |εest = 1 − α, (10) in which form we recognize that the confidence interval is for ε|εest , the true error given the estimated error. Assuming that ε|εest is normally distributed, the probability expression can be written as εα |εest − E ε|εest P Z< σ ε|εest = 1 − α, (11) where Z is the standard normal variable, E[ε|εest ] is the conditional expectation of ε given εest , and σ[ε|εest ] is the conditional standard deviation of ε given εest . If ε|εest is approximately normally distributed, then the relation is approximate. If we let zα denote the 1 − α upper bound for the standard normal variable, meaning P(Z < zα ) = 1 − α, then the preceding equation implies εn zα + E εn , Msamp n,α = Eεn σ εn | Hold-out Bolstering εα |εest = σ ε|εest zα + E ε|εest . (12) (14) = Eεm σ εm | εm zα + E εm . (15) (16) According to (16), a large holdout reduces Eεm [σ[εm | εm ]]zα at the cost of increasing E[εm ]. Indeed, large m εm ]] and decreases E[εm ] at the cost of increasing Eεm [σ[εm | εm ]] at the cost of increasing small m decreases Eεm [σ[εm | E[εm ]. The combined effect is seen in Figure 3(e), where for increasing m, Mtest m,α first decreases and then increases. This effect can also be seen for QDA in similar graphs http://www.ece.tamu.edu/∼edward/holdout. None of this should make us lose sight of the main observation: in all cases, both for 3NN and QDA, holdout performs worse than the full-sample estimators. Perhaps what is most interesting about (14) is the manner in which the variance manifests itself. It is not the standard deviation of the estimate; rather, it is the expected conditional standard deviation of the true error given the estimate. To help explain the implications of this observation, we will consider resubstution estimation. Although we would not use the confidence-bound analysis for resubstitution owing to its usual low bias, we can certainly compute for resubstitution, and we believe that doing so is Msamp n,α enlightening. The variance of resubstitution is significantly less than that of cross-validation in the cases studied [1]; however, Msamp n,α is generally larger for resubstitution than for cross-validation (see table of resubstitution values available at http://www.ece.tamu.edu/∼edward/holdout). Given the approximation of (14), this can only be the result of the conditional variance term because zα and E[εm ] are common to both error estimators; that is, Eest [σ[ε|εest ]] is greater for resubstitution than it is for cross-validation. This phenomenon is illustrated for 3NN in Figure 5. Figure 5(a) shows the conditional-variance curves for σ 2 [ε|εest ] for the nonlinear model, with 2 feature groups, feature correlation ρ = 0.250, and expected Bayes error 0.15, and Figure 5(b) shows the corresponding conditional confidence bounds. In Figure 5(b), the means of the estimated errors are marked on the horizonal axis, the means of the 95% confidence bounds are marked on the vertical axis, and the mean true error is marked on the vertical axis by a red diamond. It is clear that the resubstitution conditional variance is greater near its center of mass than are the other estimators near 8 EURASIP Journal on Bioinformatics and Systems Biology 3.3. Concluding Remarks Var (true error|estimated error) 0.065 We propose a confidence-based criterion to decide between experimental designs, our particular interest being between full-sample and holdout classifier designs. One is free to propose other criteria, but reasonable probabilistic criteria upon which to ground a decision are certainly needed. Given the importance of the applications being considered, to leave matters in an ad hoc state of affairs is unacceptable. A critical point of the experiments is that the decision for full-sample design holds across various models and parametric settings, and the decision is generally clear cut. This consistency is important for practical application, where one does not know the feature-label models. 0.06 0.055 0.05 0.045 0.04 0.035 0.03 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 References Estimated error B632 Bolstered resubstitution Semi-bolstered resubstitution Loo Resubstitution CV 95 % upper-confidence bound for the true error (a) 0.45 0.4 0.35 0.3 0.25 0.2 0.15 0.1 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 Estimated error 0.45 0.5 B632 Bolstered resubstitution Semi-bolstered resubstitution Loo Resubstitution CV (b) Figure 5: (a) Conditional variance for the true error for 3NN; (b) conditional 95% bounds for the true error for 3NN. their centers of mass, thereby leading to a greater expected conditional standard deviation for resubstitution and thus a greater expected confidence bound for resubstitution. The appearance of the expected conditional standard deviation of the true error in the partition of Mα in (14) is not counterintuitive. If we assume that the error estimator is unbiased, then E[εest ] = E[ε]. If we now assume that Eest [σ[ε|εest ]] is small, then σ[ε|εest ] is small relative to the distributional mass of εest , which in turn means that εest ≈ ε|εest relative to the mass of εest , which then implies that Eest [|εest − ε|εest |] is small; that is, the error estimator is performing well. [1] U. M. Braga-Neto and E. R. Dougherty, “Is cross-validation valid for small-sample microarray classification?” Bioinformatics, vol. 20, no. 3, pp. 374–380, 2004. [2] A. M. Molinaro, R. Simon, and R. M. Pfeiffer, “Prediction error estimation: a comparison of resampling methods,” Bioinformatics, vol. 21, no. 15, pp. 3301–3307, 2005. [3] B. Efron, “Bootstrap methods: another look at the jacknife,” Annals of Statistics, vol. 7, pp. 1–26, 1979. [4] U. M. Braga-Neto and E. R. Dougherty, “Bolstered error estimation,” Pattern Recognition, vol. 37, no. 6, pp. 1267–1281, 2004. [5] L. Devroye, L. Gyorfi, and G. Lugosi, A Probabilistic Theory of Pattern Recognition, Springer, New York, NY, USA, 1996. [6] M. Chernick, Bootstrap Methods: A Practitioners Guide, John Wiley & Sons, New York, NY, USA, 1999. [7] C. Sima, S. Attoor, U. M. Braga-Neto, J. Lowey, E. Suh, and E. R. Dougherty, “Impact of error estimation on feature selection,” Pattern Recognition, vol. 38, no. 12, pp. 2472–2482, 2005. [8] C. Sima and E. R. Dougherty, “Optimal convex error estimators for classification,” Pattern Recognition, vol. 39, no. 9, pp. 1763–1780, 2006. [9] Q. Xu, J. Hua, U. M. Braga-Neto, Z. Xiong, E. Suh, and E. R. Dougherty, “Confidence intervals for the true classification error conditioned on the estimated error,” Technology in Cancer Research and Treatment, vol. 5, no. 6, pp. 579–590, 2006. [10] Y. Xiao, J. Hua, and E. R. Dougherty, “Quantification of the impact of feature selection on the variance of cross-validation error estimation,” EURASIP Journal on Bioinformatics and Systems Biology, vol. 2007, Article ID 16354, 11 pages, 2007. [11] I. Tabus and J. Astola, “Gene feature selection,” in Genomic Signal Processing and Statistics, pp. 67–92, Hindawi, New York, NY, USA, 2005. [12] L. J. van’t Veer, H. Dai, M. J. van de Vijver, et al., “Gene expression profiling predicts clinical outcome of breast cancer,” Nature, vol. 415, no. 6871, pp. 530–536, 2002. [13] M. J. van de Vijver, Y. D. He, L. J. van’t Veer, et al., “A gene-expression signature as a predictor of survival in breast cancer,” New England Journal of Medicine, vol. 347, no. 25, pp. 1999–2009, 2002. [14] A. Choudhary, M. Brun, J. Hua, J. Lowey, E. Suh, and E. R. Dougherty, “Genetic test bed for feature selection,” Bioinformatics, vol. 22, no. 7, pp. 837–842, 2006, http://www.ece.tamu.edu/∼edward/fstestbed. EURASIP Journal on Advances in Signal Processing Special Issue on Recent Advances in Biometric Systems: A Signal Processing Perspective Call for Papers Biometrics a digital recognition technology that relies on highly distinctive physical and physiological characteristics of an individual is potentially a powerful and reliable method for personal authentication. The increasing importance of biometrics is underscored by the rapidly growing number of educational and research activities devoted to this field; and by a large number of annually organized Conferences and Symposia exclusively devoted to biometrics. Biometrics is a multidisciplinary field with researchers from signal processing, pattern recognition, computer vision, and statistics. Recently, a number of new important directions have been identified for biometric research, including processing and encoding of nonideal data, biometrics at a distance, and data quality assessment. Problems in nonideal biometric data include off-angle, occluded, blurred, and noisy images. Biometrics at a distance is concerned with recognition from video or snapshots of a biometric samples captured from a noncooperative moving individual. The goal of this special issue is to focus on recent advances in signal processing of biometric data that allow improved recognition performance through novel restoration, processing, and encoding; matching techniques capable of dealing with complexity and distortions in data acquired from a distance; recognition from biometric data acquired from unconstrained environments or complex experimental set ups; and the characterization of quality and its relationship with performance. Topics of interest include, but are not limited to: • Biometric-based recognition under unconstrained presentation and/or complex environment using the following: ◦ Face ◦ Iris ◦ Fingerprint ◦ Voice ◦ Hand ◦ Soft biometrics • Multimodal biometric recognition using nonideal data • Biometric image/signal quality assessment: ◦ Face ◦ Iris ◦ ◦ ◦ ◦ Fingerprint Voice Hand Soft biometrics • Biometric security and privacy ◦ Liveness detection ◦ Encryption ◦ Cancelable biometrics The special issue will focus both on the development and comparison of novel signal/image processing approaches and on their expanding range of applications Authors should follow the EURASIP Journal on Advances in Signal Processing manuscript format described at the journal site http://www.hindawi.com/journals/asp/. Prospective authors should submit an electronic copy of their complete manuscript through the journal Manuscript Tracking System at http://mts.hindawi.com/, according to the following timetable: Manuscript Due October 1, 2008 First Round of Reviews January 1, 2009 Publication Date April 1, 2009 Guest Editors Natalia A. Schmid, Lane Department of Computer Science and Electrical Engineering, West Virginia University, Morgantown, WV 26506, USA; [email protected] Stephanie Schuckers, Electrical & Computer Engineering, Clarkson University, Potsdam, NY 13699, USA; [email protected] Jonathon Phillips, National Institute of Standard and Technology, Gaithersburg, MD 20899, USA; [email protected] Kevin Bowyer, University of Notre Dame, Notre Dame, IN 46556, USA; [email protected] Hindawi Publishing Corporation http://www.hindawi.com EURASIP Journal on Wireless Communications and Networking Special Issue on Wireless Physical Layer Security Call for Papers Security is a critical issue in multiuser wireless networks in which secure transmissions are becoming increasingly difficult to obtain in highly mobile and distributed environments. In his seminal works of the late 1940s, Shannon formalized the concepts of capacity (as a transmission efficiency measure) and equivocation (as a measure of secrecy). Together with Wyner’s fundamental formulation of the wiretap channel in the 1970s, this work laid the groundwork for the area of wireless physical area security. Interest in this area has exploded in recent years, motivated by the rise of wireless networking in general and by the increasing interest in large mobile networks with light infrastructure, which are extremely difficult to secure by traditional methods. The objective of this special issue (whose preparation is carried out under the auspices of the EC Network of Excellence in Wireless Communications NEWCOM++) is to gather recent advances in the area of wireless physical layer security from the theoretical, such as the analysis of the secrecy capacity of various channel models, to more practical interests such as the development of codes and other communication schemes that can provide security in real networks. Suitable topics for this special issue dedicated to physical layer security include but are not limited to: • • • • • • • • • • • • • • • • • Opportunistic secrecy The wiretap channel with feedback Authentication over the wiretap channel Information theoretic secrecy of fading channels Secrecy through public discussion Wireless key distribution Multiuser channels with secrecy constraints MIMO wiretap channels Relay-eavesdropper channel Scheduling for secure communications Secure communication with jamming Game theoretic approaches for secrecy Codes for secure transmission Secure compression Cognitive approaches for secrecy Physical Secrecy and Common Randomness Secrecy with channel uncertainty Authors should follow the EURASIP Journal on Wireless Communications and Networking manuscript format described at the journal site http://www.hindawi.com/journals/ wcn/. Prospective authors should submit an electronic copy of their complete manuscript through the journal Manuscript Tracking System at http://mts.hindawi.com/, according to the following timetable. Manuscript Due October 1, 2008 First Round of Reviews January 1, 2009 Publication Date April 1, 2009 Guest Editors Mérouane Debbah, Alcatel-Lucent Chair on Flexible Radio, Supélec, 3 rue Joliot-Curie, 91192 Gif-sur-Yvette Cedex, France; [email protected] Hesham El-Gamal, Department of Electrical & Computer Engineering, Ohio State University, 205 Dreese Labs, 2015 Neil Avenue Columbus, OH 43210, USA; [email protected] H. Vincent Poor, Department of Electrical Engineering, Princeton University, Engineering Quadrangle, Olden Street, Princeton, NJ 08544, USA; [email protected] Shlomo Shamai, Department of Electrical Engineering, Technion, Technion City, Haifa 32000, Israel; [email protected] Hindawi Publishing Corporation http://www.hindawi.com EURASIP Journal on Embedded Systems Special Issue on FPGA Supercomputing Platforms, Architectures, and Techniques for Accelerating Computationally Complex Algorithms Call for Papers Field-programmable gate arrays (FPGAs) provide an alternative route to high-performance computing where finegrained synchronisation and parallelism are achieved with lower power consumption and higher performance than just microprocessor clusters. With microprocessors facing the “processor power wall problem” and application specific integrated circuits (ASICs) requiring expensive VLSI masks for each algorithm realisation, FPGAs bridge the gap by offering flexibility as well as performance. FPGAs at 65 nm and below have enough resources to accelerate many computationally complex algorithms used in simulations. Moreover, recent times have witnessed an increased interest in design of FPGA-based supercomputers. This special issue is intended to present current state-ofthe-art and most recent developments in FPGA-based supercomputing platforms and in using FPGAs to accelerate computationally complex simulations. Topics of interest include, but are not limited to, FPGA-based supercomputing platforms, design of high-throughput area time-efficient FPGA implementations of algorithms, programming languages, and tool support for FPGA supercomputing. Together these topics will highlight cutting-edge research in these areas and provide an excellent insight into emerging challenges in this research perspective. Papers are solicited in any of (but not limited to) the following areas: • Architectures of FPGA-based supercomputers ◦ History and surveys of FPGA-based supercomputers architectures ◦ Novel architectures of supercomputers, including coprocessors, attached processors, and hybrid architectures ◦ Roadmap of FPGA-based supercomputing ◦ Example of acceleration of large applications/ simulations using FPGA-based supercomputers • FPGA implementations of computationally complex algorithms ◦ Developing high throughput FPGA implementations of algorithms ◦ Developing area time-efficient FPGA implementations of algorithms ◦ Precision analysis for algorithms to be imple- mented on FPGAs • Compilers, languages, and systems ◦ High-level languages for FPGA application de- velopment ◦ Design of cluster middleware for FPGA-based supercomputing platforms ◦ Operating systems for FPGA-based supercom- puting platforms Prospective authors should follow the EURASIP Journal on Embedded Systems manuscript format described at the journal site http://www.hindawi.com/journals/es/. Prospective authors should submit an electronic copy of their complete manuscript through the journal Manuscript Tracking System at http://mts.hindawi.com/, according to the following timetable: Manuscript Due July 1, 2008 First Round of Reviews October 1, 2008 Publication Date January 1, 2009 Guest Editors Vinay Sriram, Defence and Systems Institute, University of South Australia, Adelaide, South Australia 5001, Australia; [email protected] David Kearney, School of Computer and Information Science, University of South Australia, Adelaide, South Australia 5001, Australia; [email protected] Lakhmi Jain, School of Electrical and Information Engineering, University of South Australia, Adelaide, South Australia 5001, Australia; [email protected] Miriam Leeser, School of Electrical and Computer Engineering, Northeastern University, Boston, MA 02115, USA; [email protected] Hindawi Publishing Corporation http://www.hindawi.com EURASIP Journal on Advances in Signal Processing Special Issue on Game Theory in Signal Processing and Communications Call for Papers Game theory is a branch of mathematics aimed at the modeling and understanding of rational behavior in strategic situations. In the last decade, game theory has been applied to solve conflict problems in economics, and has found important applications in politics, sociology, psychology, and transportation. Game theory has more recently been employed to model and analyze modern communication systems, such as power control in wireless networks and routing in wire line networks. Also, it provides a structured approach to many important signal processing problems, including cognitive radio, waveform design, and dynamic spectrum access. Game theory is successfully applied to design decentralized algorithms and robust signal processing methods in various deployment scenarios. This special issue aims to promote the field of game theory to the signal processing audience. We are soliciting highquality unpublished research papers addressing the theory and practice of game theory in signal processing and communications. Topics include, but are not limited to: • Static non-cooperative games (Nash and Stackelberg • • • • • • • • Manuscript Due October 1, 2008 First Round of Reviews January 1, 2009 Publication Date April 1, 2009 Guest Editors Holger Boche, Berlin Institute of Technology, 10623 Berlin, Germany; [email protected] Zhu Han, Department of Electrical and Computer Engineering, College of Engineering, Boise State University Boise, ID 83725, USA; [email protected] Erik G. Larsson, Division of Communication Systems, Department of Electrical Engineering (ISY), Linköping University, 581 83 Linköping, Sweden; [email protected] Eduard A. Jorswieck, Communications Laboratory, Dresden University of Technology, 01062 Dresden, Germany; [email protected] equilibria) Finite and infinite dynamic games Cooperative (bargaining) game theory Auctions, coalitions, and pricing Game theory for resource allocation in communications Game theory for adaptive waveform design Game theory for cognitive radio and dynamic spectrum access Stochastic games, repeated games, and fading channels Development of decentralized algorithms using game theory Authors should follow the EURASIP Journal on Advances in Signal Processing manuscript format described at the journal site http://www.hindawi.com/journals/asp/. Prospective authors should submit an electronic copy of their complete manuscript through the EURASIP JASP Manuscript Tracking System at http://mts.hindawi.com/, according to the following timetable: Hindawi Publishing Corporation http://www.hindawi.com EURASIP Journal on Wireless Communications and Networking Special Issue on Advances in Propagation Modelling for Wireless Systems Call for Papers The true challenge for new communication technologies is to “make the thing work” in real-world wireless channels. System designers classically focus on the impact of the radio channel on the received signals and use propagation models for testing and evaluation of receiver designs and transmission schemes. Yet, the needs for such models evolve as new applications emerge with different bandwidths, terminal mobility, higher carrier frequencies, new antennas, and so forth. Furthermore, channel characterization also yields the fundamental ties to classical electromagnetics and physics, as well as the answers to some crucial questions in communication and information theory. In particular, it is of outstanding importance for designing transmission schemes which are efficient in terms of power or spectrum management. The objective of this special issue is to highlight the most recent advances in the area of propagation measurement and modeling. Original and research articles are solicited in all aspects of propagation, including experimental characterization, channel sounding, theoretical modeling, hardware emulation and new communication technologies. Topics include, but are not limited to: • • • • • • • • • • • • • • • 4G channel measurements and modeling Fixed wireless access (including outdoor-to-indoor) UWB propagation 60 GHz channel measurements and modeling Propagation models for wireless sensor networks, including RFIDs Spectrum sensing and channel prediction for cognitive radio Intra/inter vehicle and vehicle-to-infrastructure channel characterization Body area propagation modeling Double-directional and MIMO channels Multiuser MIMO channels Multi-hop and cooperative channels Polarimetric channels Shadowing correlation modeling Temporal variations in wireless channels Frequency and range dependence of parameters • • • • High-resolution algorithms for parameter extraction Channel prediction and tracking Numerical methods in wireless channel modeling Advances in channel emulation and sounding Authors should follow the EURASIP Journal on Wireless Communications and Networking manuscript format described at the journal site http://www.hindawi.com/ journals/wcn/. Prospective authors should submit an electronic copy of their complete manuscript through the journal Manuscript Tracking System at http://mts.hindawi.com/, according to the following timetable. Manuscript Due August 1, 2008 First Round of Reviews November 1, 2008 Publication Date February 1, 2009 Guest Editors Claude Oestges, Microwave Laboratory, Université Catholique de Louvain,1348 Louvain-la-Neuve, Belgium; [email protected] Michael Jensen, Department of Electrical & Computer Engineering, Brigham Young University, Provo, UT 84602, USA; [email protected] Persefoni Kyritsi, Antennas, Propagation and Radio Networking Section, Aalborg University, 9100 Aalborg, Denmark; [email protected] Mansoor Shafi, Telecom New Zealand, Wellington, New Zealand; [email protected] Jun-ichi Takada, Department of International Development Engineering, Tokyo Institute of Technology, Tokyo, Japan; [email protected] Hindawi Publishing Corporation http://www.hindawi.com EURASIP Journal on Advances in Signal Processing Special Issue on Digital Signal Processing for Hearing Instruments Call for Papers Hearing, as a prerequisite of listening, presumably represents the most important pillar of men’s ability to communicate with each other. Hence, engineers of all denominations, physicists, and physicians have always been creative both to improve the environmental conditions of hearing and to ameliorate the individual hearing capability. Digital signal processing for hearing instruments has been an active field of research and industrial development for more than 25 years. As a result, these efforts have eventually paid off and, thus, opened big markets for digital hearing aids and cochlear implants which, in turn, promote and accelerate related research and development. Certainly, the present state-of-the-art of hearing instruments has highly profited from efficient small size technology with very low power consumption mainly developed for portable communication equipment, advanced multirate algorithms for digital filtering and filter banks, and speech processing and enhancement devised for modern speech transmission and recognition. Moreover, these examples of cross-fertilisation exploiting synergies are continuing and expanding on a large scale. To further promote the aforementioned cross-fertilisation, the goal of this special issue is to collect and present actual research in (preferably digital) signal processing methods and algorithms used in or suitable for hearing instruments. Topics of interest include (but are not limited to): • • • • • • • • • • • • Source localisation/tracking/separation Acoustic feedback cancellation Noise and interference reduction Dereverberation Signal detection and classification Auditory scene analysis Psycho-acoustically motivated procedures and algorithms Binaural signal processing Filter banks Optimisation of DSP architectures Wireless techniques applicable to hearing instruments Interfacing hearing instruments with communication equipment • Test beds, evaluations, and campaigns • Related surveys (tutorials) are solicited Authors should follow the EURASIP Journal on Advances in Signal Processing manuscript format described at the journal site http://www.hindawi.com/journals/asp/. Prospective authors should submit an electronic copy of their complete manuscript through the journal Manuscript Tracking System at http://mts.hindawi.com/ according to the following timetable: Manuscript Due December 1, 2008 First Round of Reviews March 1, 2009 Publication Date June 1, 2009 Guest Editors Heinz G. Göckler, Digital Signal Processing Group (DISPO), Ruhr-Universität Bochum, 44780 Bochum, Germany; [email protected] Torsten Dau, Centre for Applied Hearing Research, Acoustic Technology, Department of Electrical Engineering, Technical University of Denmark, 2800 Kgs. Lyngby, Denmark; [email protected] Hugo Fastl, Institute for Human-Machine Communication, Technische Universität München, 80333 München, Germany; [email protected] Walter Kellermann, Multimedia Communications and Signal Processing, University of Erlangen-Nuremberg, 91058 Erlangen, Germany; [email protected] Sven Erik Nordholm, Signal Processing Laboratory, Western Australian Telecommunications Research Institute (WATRI), Crawley, WA 6009, Australia; [email protected] Henning Puder, Siemens Audiologische Technik GmbH, 91058 Erlangen, Germany; [email protected] Hindawi Publishing Corporation http://www.hindawi.com










© Copyright 2026