
The Environmental Sample Processor (ESP) Software Design:
The Environmental Sample Processor (ESP) Software Design:
Software for Detection and Quantification of Microorganisms
Danelle E. Cline, Thomas C. O’Reilly,
Timothy Meese, Brent Roman, and Duane R. Edgington
Monterey Bay Aquarium Research Institute
7700 Sandholdt Road
Moss Landing, CA 95039 USA
Abstract- The Environmental Sample Processor (ESP)
instrument has been designed by the Monterey Bay
Aquarium Research Institute (MBARI) for ocean sampling
and monitoring. The ESP is an in situ sampling and
processing device that enables near real-time detection of
specific microorganisms through the application of molecular
probes. The intended use of ESP is a 1 to 3 month
deployment in 50 meters maximum depth for detection of
harmful algal blooms.
In this paper, we present an overview of the software
architecture deployed on the ESP instrument. The ESP
software design is applied on two prototype instruments with
similar mechanical design, but different control electronics.
Presented in this work is the software architectural
framework used that allows for controlled start up,
shutdown, task and event handling in a concurrent software
environment.
We discuss how object-oriented design
patterns such as the Adapter pattern are used to solve design
problems and how testing improved reliability. A description
and examples are given of the flexible ESP macro language
that allows scientists to automate chemical processing steps.
And finally, an algorithm for DNA probe array image
registration and data extraction involving low-pass filtering,
connected components, rotational translation, and component
recognition and interpretation is presented.
INTRODUCTION
The application of molecular probe assays to detect
harmful algal bloom (HAB) species typically involve
highly repetitive operations, require trained personnel, and
are often difficult to perform outside the laboratory. It is
highly desirable to have an instrument designed to collect
samples and automate the application of probe assays in
situ. Such an instrument used in conjunction with existing
in situ chemical, physical, or optical sensors, would
dramatically improve our ability to detect HABs within
their biological context [1].
The impetus for building the Environmental Sample
Processor (ESP) was to build a sampling device to enable
in situ analysis, because an instrument with such analysis
capabilities simply did not exist. Our target design for the
ESP was to automate HAB detection. However, by
adapting the ESP operation through its macro language,
the ESP can be used for a wide range of water quality
monitoring (e.g. pesticides, E. coli, etc.).
The ESP was designed and built by a team of engineers
at the Monterey Bay Aquarium Research Institute
(MBARI) in conjunction with the molecular biology lab
led by Dr. Chris Scholin. The ESP device and software are
protected under a U.S. patent [2].
This paper presents an overview of the software
architecture deployed on the ESP instrument. We first
give a technical overview of the ESP instrument and
operation. We then discuss the software architecture, ESP
macro language, and design challenges. Lastly, we give an
overview of the algorithm for processing filter images.
II. TECHNICAL OVERVIEW
A. Shipboard and Embedded ESP
MBARI has fabricated two complete ESP instruments;
one unit is for shipboard use and the other is an embedded
unit for in situ use.
The first ESP is a rugged, rack-mounted shipboard unit
intended for short duration cruises to aid traditional
techniques of sampling and processing for HAB detection.
The shipboard unit was also intended to be a hands-on
prototype the MBARI science and engineering staff could
use to determine what worked and what didn’t.
The second ESP built is an embedded instrument built
for in situ use on a moored platform. All the design
refinements from the shipboard unit are rolled into the
embedded ESP, making the embedded ESP nearly
identical mechanically to the shipboard ESP.
B. ESP Operation
The fundamental operation of the ESP is to
autonomously filter discrete volumes of seawater through a
filter membrane and to automate the application of DNA
(or other molecular) probes to identify and quantify the
captured microorganisms. Reference [1] gives further
details on the ESP concept and chemistry that drove its
design. (Please note that ESP is referred to as
“Genosensor” in [1].)
For real-time species detection using ESP, cells are
broken open and their contents washed over species-
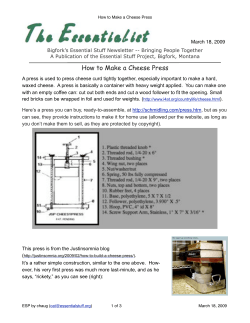
Figure 2. Examples of the detection of the toxic, pennate diatom
Pseudo-nitzschia australis with the shipboard ESP. The presence of
the diatom results in the emission of light. P.australis was not
detected in sample 1, which was collected in an area of upwelling,
but was detected in sample 4, which was collected where the water
was warmer. Both samples were taken in the Monterey Bay.
Samples were collected for later whole cell analyses. Panel 1a was
treated to show all species in the sample and sample 4a was treated
with a probe that labels P.australis specifically. [1,2]
Figure 1. Left, Environmental Sample Processor, Right, ESP
enclosed in housing for deployment
specific ribosomal RNA (rRNA)-targeted DNA probes.
These probes are arrayed in a matrix of dots on the filter
membrane. Subsequent processing steps causes these dots
to fluoresce or luminesce, where each dot's intensity is
proportional to a specific organisms abundance in the
sample. Filter membranes are imaged with a charge
coupled device (CCD) camera to produce an image similar
to that in Fig. 2. An image-processing algorithm is then
applied to the image to produce a report of presence and
abundance of targeted organisms.
C. Hardware Details
The ESP is an electromechanical device featuring six
motor-mechanical assemblies, a heating system, 28 valves,
a cooled-CCD camera, and a 25 ml motor driven syringe
for metering reagents and samples.
Motion System
There are six motion axes altogether: two filter
elevators, a carousel, shuttle, filter clamp, and syringe.
Each motor assembly consists of a lead screw assembly
attached to small DC motors with integral shaft encoders.
Each axis has a forward and reverse limit switch used to
halt motion at the end of travel. Motors are controlled with
a pulse width modulated control loop using incremental
encoder feedback. Five out of the six motion assemblies
are dedicated to positioning custom designed filter holders
within a clamp assembly. The remaining motion assembly
is a syringe plunger mounted on a lead screw, used for
metering reagents and as a sample pump.
Imaging System
The ESP camera is a Santa Barbara Instruments Model
ST-8E CCD designed for astronomy use. A Peltier
junction cools the 1530 x 1020 pixel CCD detector to
typically 10 to -17 degrees Celsius. Filter images are
acquired with up to 5 minute exposure times. The output of
the imaging software is a standard 16-bit Monochrome
Tag Image File Format (TIFF) stream. The TIFF files are
stored on the instrument's flash disk and may be uploaded
to a client computer through a communication link.
Housekeeping Sensors
To detect leaks or electrical ground to seawater, the ESP
includes a humidity sensor and ground fault circuitry. If
humidity becomes abnormally high or a ground fault
occurs, the system immediately shuts down.
Heater System
The filter holder containing the filter membrane is
clamped between two film heaters. The temperature of the
filter holder is sensed by an infrared detector operating at a
distance of approximately 0.75 inches from the filter. A
PID loop executing at 1 Hz in software uses the infrared
sensor as feedback to maintain temperature within 1
degree of desired set point.
User Interface
Application Logic
Protocol Layer (TCP-IP)
Client Computer
Power Management
The ESP instrument transitions to a low-power state
between samples. In the low-power state, the entire PC104 stack is powered off, except a timer circuit on the
power supply board. During normal operation, the ESP
powers itself on at a user programmed GMT time. Upon
wakeup, pre-programmed macro files are loaded and
executed in sequence. A typical sample takes 2 to 6 hours
to process. To minimize heat and power dissipation within
the enclosure, the entire CCD camera is powered on only 7
minutes before an exposure is taken to allow just enough
time for the Peltier junction to cool the CCD. To further
minimize power, motors are powered on only when in
motion.
Communications
Two communications paths are built into the ESP
design: a wireless and a direct path. For mooring
communications, a wireless SLIP connection is made over
a pair of wireless data transceivers (Freewave model DGR115W radio modems). This data link provides up to 115
KBaud throughput across a 20 mile range. For testing or
pre-deployment configuration, connection is made with the
PC-104 Ethernet adapter.
Ethernet
RF Modem
ESP Instrument
PC-104 Stack
To speed up system development and meet space
constraints, the ESP design includes nine PC-104
compliant electronics cards. The CPU module features a
80486DX4 CPU operating at 66MHz, 52 MB RAM, a
128MB compact flash disk, serial and parallel ports,
floppy interface, IDE interface, keyboard, and clock. A
standard Ethernet card is used as the link for software
development and for instrument test and configuration.
The remaining off-the-shelf PC-104 modules include a
vehicle grade power supply, three servo control boards for
motion control, two solid state relay cards to optically
isolate and switch valves, and a multifunction A/D card for
system sensors. One custom PC-104 form factor card was
built for power switching, sensor conditioning and ground
fault detection. Miscellaneous wiring harnesses and
breakout boards provide the glue to the PC-104 stack. The
operating system used is VxWorks 5.4 and software is
developed using the Tornado 2.0 cross development
environment.
Transport Layer (SLIP)
Transport Layer (SLIP)
Protocol Layer (TCP-IP)
Application Framework
Macros and Macro
Interpreter
Alarm
Handler
Instrument Control Logic
Data
Logger
Hardware Adapation Layer
Operating System Adaptation Layer
Operating System (NT/VxWorks)
Figure 3. ESP Software Layers
III. SOFTWARE ARCHITECTURE
The ESP software is an object-oriented design, largely
written in C++ and operates on the real-time operating
system VxWorks version 5.4 (embedded version). In the
classical sense of a real-time system, the ESP system is
considered a ‘soft’ real-time system.
At the highest layers of the software architecture (Fig. 3)
are the user interface and communication protocols. Here,
a simple menu based user interface communicates to the
instrument through a wireless SLIP connection or a direct
Ethernet connection.
At the core of the ESP design is a software framework
that allows for controlled startup, shutdown, task and event
handling in a concurrent software environment. The
application framework is a collection of classes built for
instrument design. This framework was an in-house tested
design we used to speed up development.
Controlled by the framework is a set of classes that
define the ESP macro language. The ESP language is a
simple ASCII based language used to execute common
algorithms that control the ESP. It gives flexibility to the
science user by allowing lab-based chemical processing
steps to be described with a simple text editor.
Also controlled by the framework is the collection of
classes that compose the instrument control logic. Control
logic is invoked through callback functions called by a
main event loop in the application framework.
Figure 4. Adapter design pattern class structure
Outside the framework are classes for alarm handling
and data logging. These classes manage collecting and
organizing error and status messages for display and
storage.
Beneath the application layer is the hardware adaptation
layer. This adaptation layer is where we isolate the
hardware-dependent parts of the program from the
hardware-independent parts. This allows the ESP software
to function on two different sets of control electronics, one
for the shipboard and the other for the embedded ESP.
Building the adaptation layer did require extra effort, yet
allowed us to minimize the future overhead of maintaining
two programs.
Beneath the hardware adaptation layer is the operating
system adaptation layer. Adding the operating system
adapter layer allowed us to support both shipboard and
embedded ESP operating systems (Windows NT and
VxWorks respectively).
A. Design Strategy
Design for Changing Requirements
It is critical that the software design adapt to incremental
changes without requiring major software redesign. Rather
than approach the design in terms of function, an objectoriented design strategy is used in the ESP. Given that we
had a small design team, we needed to respond to changes
without requiring significant rework. A good objectoriented design allowed us to change individual object
representations without changing the entire design.
Incorporate Software Reuse and Object-Oriented
Design Patterns
Software design patterns and reusable object-oriented
designs are used where possible throughout the entire ESP
design.
By reusing previously tested designs, we shortened our
development time and reduced maintenance time. The
Application Framework, Data Logger and Alarm Handler
are all examples of a software reuse in the ESP software
design.
Figure 5. Motor Adapter class structure
By using design patterns we created a more flexible and
elegant design. A design pattern can be described as the
core solution to a general problem that occurs over and
over again. In the software context, a software design
pattern is a “description of communicating objects and
classes that are customized to solve a general design
problem in a particular context [3]. ” The intention of a
software design pattern is to identify classes and class
collaborations, not to detail the concrete solution.
After close inspection, we found many applications for
object-oriented design patterns including the Adapter,
Factory, Command, and Singleton. A detailed description
of the software patterns used in the ESP design can be
found in [3].
Describing all the design pattern use in the ESP is
beyond the scope of this paper. However, we will present
one pattern – the Adapter pattern - to describe its use in the
context of a real-world application.
The Adapter pattern is used in seven different
components in the ESP design. Basically, this pattern is
applied when an interface doesn’t match the one needed.
The Adapter provides one common interface for a client
class to use. This was precisely the problem we had with
incompatible hardware and operating system interfaces.
We needed one common interface to access two sets of
operating systems and two different hardware platforms
(shipboard and embedded).
The structure of the Adapter pattern in Fig. 4 is
described in the Unified Modeling Language (UML) [4].
In the Adapter pattern, A Client class uses the adapter
through a common Target interface. The Adapter adapts
the interface of the Adaptee to its Target interface [3]. Fig.
5 shows the pattern applied to different motor driver
interfaces. Notice in Fig. 5 that there are two participants
to the adaptee - the AndiServo and CDMCWin classes.
Also note that the implementation is slightly different from
the textbook Adapter pattern. The Motor and
MotorAdapter have a composition relationship (the Motor
class is composed of a MotorAdapter object), rather than a
Figure 6. Motor-Axis Class Heirarchy
subclassed relationship (the Adapter subclasses the
Target).
B. Object Identification
In the evolution of the ESP design we discovered that
the real art in object-oriented design is identifying objects.
Fortunately, there was a clear mapping between the ESP
system and controlling objects, making the process of
object identification relatively straightforward. However,
this did not preclude the object (class) designs from
evolving from their original design concept as is normal in
any object-oriented design. As the ESP instrument evolved
inheritance hierarchies and object structure were reviewed
and revised accordingly.
The process of identifying objects in the ESP design
started with the ESP project statement of work document
[7]. By identifying objects within the document described
in the form of nouns (syringe, carousel, macro, valve
manifold, etc.) we determined the system objects. By
identifying verbs within document, we defined the
operations and interactions between objects. For example,
the software interprets a macro file, or the carousel rotates
to align tubes. Objects were refined further by using UML
drawings and listing out operations and attributes of each
object. During this process, common factors between
objects became evident, resulting in a more refined
inheritance structure.
The resultant design was a decomposition of the
software into parts that map either into concrete hardware
systems or more abstract system functions. A good
example of the resultant object decomposition is the
hierarchy of the motor-axis subsystem (Fig. 6). All the
common functions and variables for each axis are factored
out into an Axis class. At the root of the tree is the Motor
class that provides a common interface for all motor
commands common to each axis. The concrete
Figure 7. ESP Application Framework class structure
Active/task classes are shown in bold boxes
implementations (Carousel, Syringe, etc.), can override the
behavior of the Motor or Axis class to provide unique
implementations specific to their design. At this level,
unique ‘find home’ algorithms or custom jogging
behaviors are implemented.
C. Application Framework Design
The framework used in the ESP application is an
instrument application framework. In the object-oriented
context, a framework can be considered a semi-complete
collection of classes, built for a particular type of
application like a user interface, a database, or, in this case,
an instrument design. The application writer simply
subclasses and overrides a few virtual functions from the
framework to create an application. The framework
handles all the details like control and synchronization
though a main event loop.
The framework used in the ESP design is sometimes
referred to as the “three-task” model because of the three
tasks in this framework: MicroApp, MicroEventHandler,
and MicroPeriodicHandler.
The framework uses a
concurrent design pattern called the half-synchronous,
half-asynchronous design pattern. This pattern is “An
architectural pattern that de-couples synchronous I/O from
asynchronous I/O in a system to simplify programming
effort with degrading execution efficiency [5].” This
pattern allows us to separate the asynchronous event like
an operator sending a command, from the synchronous
activity like monitoring a sensor at a specified rate. The
design can respond to these different I/O actions between
the
concurrent
MicroEventHandler
and
MicroPeriodicHandler tasks within a reasonable reaction
time1. Fig. 7 shows the class structure of the Application
1
A reasonable response is sufficient; this framework meets a soft realtime system requirement.
Framework with subclassed ESP application classes.
MicroApp is the main class, responsible initializing the
framework and spawning both MicroEventHandler and
MicroPeriodicHandler tasks. System shutdown and reset
are also handled in MicroApp. MicroEventHandler is the
task responsible for handling events, such as those
associated
with
coordinated
motion
control.
MicroPeriodicHandler is responsible for periodic
sampling of sensors. TaskSynchronizer handles inter-task
communication between all three tasks in the framework.
The subclassed ESP application classes are responsible for
creating all the application specific callbacks and
instrument control logic.
IV. ESP MACRO LANGUAGE
The ESP macro language is a simple, ASCII based
language for controlling the ESP. A wide range of sample
processing protocols can be described with the macro
language, enabling the ESP to execute a wide range of
water quality monitoring applications.
Each macro executes a common algorithm used to run
the instrument. There are 15 total macro commands.
TABLE 1
EXAMPLE MACRO USAGE
Macro
Description
LOADFILTER
Load filter from carousel tube 1
SYRINGEPULL 5.0 Sample
Pull 5.0 ml through “Sample” port
HEAT 40 5
Heat to 40°C for 5 minutes
ACQUIREIMAGE DARK, 3X3,
3000, "P.Australis test filter"
Acquire a dark image, 3x3
binning, 3 second exposure time,
label the image, “P. Australis test
filter”
Macros are combined in an ASCII text file to form a macro
program. An example portion of a macro program is
shown below.
# This macro represents the steps taken
# to create lysate as part one of the
# two step Sandwich Hybridization
# process
PROGRAM: SANDHYBE1Test35
SYRINGE PULL 5.0 Sample
DELAYSEC 10
SYRINGE PUSH ALL Waste
SYRINGE PULL 5.0 Setrinse
DELAYSEC 10
.
.
.
END
Macro programs are executed through a simple user
interface, where they can be started, stopped, or resumed.
Macro programs may also invoke other macro programs.
However, operators and primitives like for loops and if
then blocks are not supported in the ESP macro language.
V. DESIGN CHALLENGES
Building software to control a complex instrument poses
significant design challenges. From the beginning, ESP
engineers knew the device must be reliable under repeated
unattended operation and run autonomously.
The foremost problem to address was building a reliable
instrument for operation amidst the rigors of an ocean
deployment. Fundamentally, the ESP requires flawless
operation because it has no redundant systems to use in the
presence of failures. Recovery from any failure (software
failure, mechanical jam, etc.) is unlikely at sea. To address
the question of reliability, significant effort went into
testing for repeatable mechanical operation and reliable,
fault-tolerant software design.
A. Lab Testing
For the ESP to be reliable, it had to repeatedly execute a
sequence of macros that involved coordinated motion
control of 5 axes, heat control, image acquisition, control
and sequencing of 24 valves, precision metering of
reagents/sample, and autonomous data download.
During early development with the shipboard ESP,
carrying out repeated macros without mechanical jams or
software failures proved to be problematic. To work
through these problems, laborious lab tests anywhere from
2 hours to 20 hours were performed, primarily to exercise
ESP function using simulated science macros. These lab
tests resulted in many redesigns of mechanical, electrical,
and software systems.
B. Unit and Module Testing
Software testing included both unit and module testing
for fault tolerance. Software testing on the ESP can be
broken in to three elements: design testing, fault/error
detection testing, and error recovery testing.
Our first tests were to test for normal operation against
the detailed design. For example, a test might be designed
to test all transitions in the motor state machine design
against its paper design. This phase generally revealed
flaws in the design, making it extremely valuable. When a
test passed against its detailed design, we moved forward
to generating fault test cases.
The challenge in generating fault test cases was to
induce faults to see if they manifest themselves as an error.
For example, in the case of the motion system, to generate
test cases, we asked questions like, when a motor over-
currents, does it generate the correct exception, and is the
exception propagated correctly?
Error recovery testing was the last element of testing,
and proved to be the most difficult. Error recovery was
only possible in a few cases. At best, we could log an error
and perform retries. Most cases resulted in faults that
required some form of manual intervention.
to propagate errors and to gracefully shutdown the system.
We also unexpectedly found exceptions produce easy to
read programs.
C. Exception Handling
Extracting the data from the ESP filters required an
image-processing scheme. Unlike traditional sensor based
instrument based on optical, voltage or current
measurements, the data generated from the ESP
measurement must be extracted from an image.
As described in section II-B, the resultant reaction
causes a spot in a matrix array to fluoresce or luminesce.
Therefore, the data of interest is the location and average
intensity of each spot. The X Y location of the “dot” is
used to indicate the type of organism and the “dot’s”
intensity indicates microorganism abundance.
To date, all image-processing work has been done with
Matlab and the Matlab Image Processing Toolbox on
commercial filter grids manufactured by Beckman. Our
intention is to implement image processing on-board the
in-situ ESP, on MBARI custom-designed filter probe
arrays.
Adding exceptions improved robustness of the overall
design and allowed for a graceful degradation of the
system. Two classes of exceptions were used in the ESP
design: application exceptions and run-time exceptions.
Examples of application exceptions include ‘motor over
current’, ‘motion time out’, macro file exceptions (‘bad
argument count’, ‘argument out of range’, etc.).
Run-time exceptions include exceptions resulting from
either programmer error or system error. For example, runtime exceptions include ‘memory allocation failure’ and
‘task spawn failure’.
Careful considerations were weighed to decide where
exceptions were placed and how exceptions were handled.
Rather than taking a hit in code bloat by adding excessive
exception checks, exceptions were added only in the
highest levels of the design, as close to the caller as
possible. Exceptions were not placed in driver level code.
Here, we used return codes. This avoided the perils of
propagating exceptions through many levels to the error
handling code.
Exceptions were only handled in well-defined blocks
because it is generally considered good practice to handle
specific exceptions and not group them in a ‘catch all’
block. A ‘catch all’ block could leave some exceptions not
handled, resulting in an unstable system.
The following is an example of the use of a defined
exception block in the Syringe class runFindHome()
function:
try{
do {
… run find home algorithm
}while();
} // end try
catch(Axis::TimeOut,timeout) {
//handle error and return
}
catch(Motor::PositionError,poserr) {
//handle error and return
}
catch(Motor::OverCurrent,overcurrent) {
//handle error and return
}
In summary, we found adding exception handling
improved system reliability and created a simple structure
VI. IMAGE PROCESSING
The ESP image processing can be broken into the three
classical processing phases: Image Segmentation,
Description, and Recognition and Interpretation [6]. These
phases are described below.
A. Image Segmentation
Basically, image segmentation means divide (segment)
the image into its parts. For the filter processing this
requires separating the "dots" and alignment markers from
the background.
Segmentation is the most critical step in automating any
processing scheme. What we found particularly difficult
was segmenting “dots” with light intensities. Only by
using a combination of a priori knowledge of the expected
intensity and expected location of the features, can data be
separated from the background. In addition, it may be
necessary to use an adaptive approach that successively
loops through the processing algorithm, incrementally
moving threshold levels, until valid data is found.
B. Image Description
The second phase is to describe the segmented features
by their characteristics. Like image segmentation, tuning
the algorithms in this phase requires a priori information
about the expected location and size of “dots” and
alignment marker features. To describe features, a 4connected component algorithm is applied and feature
pixel coordinates are grouped in respective arrays. The
arrays are processed to calculate feature area, average
intensity, width, height, eccentricity, center coordinates,
and radial distance. To find potential “dot” features, a filter
is applied against each feature area and height to width
ratio. Potential “dot” features are then subtracted from the
entire feature set. The remaining features are filtered based
on area, eccentricity, and radial error, to find potential
alignment markers.
C. Image Recognition and Interpretation
The third phase is to interpret the subset of potential
data and alignment marks to find the true alignment marks
and “dots”. This is accomplished by differentiating
features based on their size, shape and location. Alignment
marks are long and thin and within a defined ring of the
filter. “Dots” are generally round and within a circular area
centered on the filter. By applying a filter using these
distinguishing features, X and Y markers and “dots” are
found. Alignment marks are used to re-orient the image by
rotating to a normalized XY coordinate system, and by
normalizing to a XY coordinate system, reported data can
be post processed more intelligently. A raw data report
might resemble the following:
2 data found
Location normalized relative to calculated center (468,335)
Area
Average
Standard
Intensity
Deviation
Alexandrium
90
2424
40
P.australis
107
2317
35
Acknowledgments
The authors would like to thank MBARI employees,
Dr. Chris Scholin, Roman Marin III, Gene Massion, Scott
Jensen, Mark Brown, Kevin Sullivan, and Karen Salamy
for their valuable ideas and participation in testing of the
software design and ESP system.
References
[1] Scholin, C., Massion, G., Mellinger, E., Brown, M.,
Wright, D., Cline, D.,“The Development and
Application of Molecular Probes and Novel
Instrumentation for Detection of Harmful
Algae”,Ocean Community Conference ’98
Proceedings, Marine Technology Society, vol. 1 pp.
367-370.
[2] Scholin, C.A., Massion, E.I., Wright, D.K., Cline,
D.E., Mellinger, E.,Brown, M. 2001. Aquatic
Autosampler Device. US Pat. No. 6187530.
[3] Gamma, E. Helm, R., Johnson, R., Vlissides, J.,
Design Patterns: Elements of Reusable ObjectOriented Software, Addison-Wesley, 1995.
[4] Booch, G., Rumbaugh, J., Jacabson, I., The Unified
Modeling Language User Guide, Addison-Wesley,
1999.
[5] Schmidt, D., “Concurrent Object-Oriented Network
Programming: Distributed object Computing with
Corba, Java, and C++,” course notes, U.C. Berkeley
University Extension, San Francisco, CA, pp 190,
November 1998.
[6] Gonzalez, R., Woods, R., Digital Image Processing,
Addison-Wesley, 1993.
[7] Massion, G., Scholin, C., Genosensor Statement of
Work, MBARI internal document, January, 1998.










© Copyright 2026