
SimAGC User Manual Contents
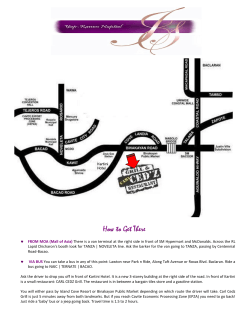
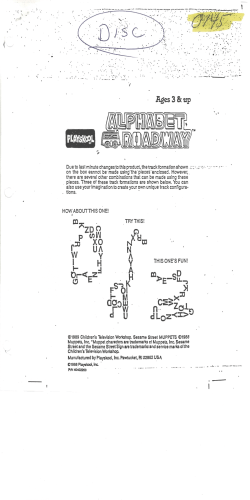
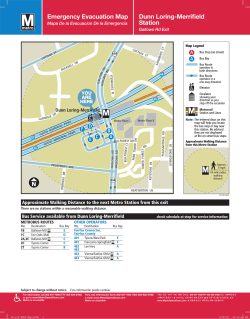
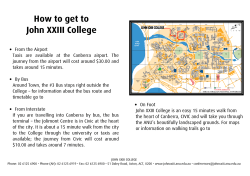
SimAGC User Manual [Version] 1.0.7 Updated on 04/06/2014 Contents 1. User Instruction .................................................................................................................................... 1 1.1 Main interface ..................................................................................................................................... 1 1.2 Load case ............................................................................................................................................. 1 1.3 Study setting configuration ................................................................................................................. 2 1.4 Solve power flow ................................................................................................................................. 3 1.5 Run dynamic simulation ...................................................................................................................... 4 1.6 Check simulation results ..................................................................................................................... 5 2. Power Flow Data Format Summary ...................................................................................................... 6 2.1 Bus data ............................................................................................................................................... 7 2.2 Load data ............................................................................................................................................. 7 2.3 Generator data .................................................................................................................................... 8 2.4 Non‐transformer branch data ............................................................................................................. 9 2.5 Transformer data .............................................................................................................................. 10 2.6 Switchable shunt data ....................................................................................................................... 11 2.7 Area data ........................................................................................................................................... 12 2.8 Zone data .......................................................................................................................................... 12 2.9 Owner data ....................................................................................................................................... 12 3. Dynamic Model Summary ................................................................................................................... 13 3.1 GENCLS .............................................................................................................................................. 13 3.2 GENROU ............................................................................................................................................ 13 3.3 ESDC1A .............................................................................................................................................. 15 3.4 ESAC4A .............................................................................................................................................. 15 3.5 TGOV1 ............................................................................................................................................... 16 3.6 IEEEG2 ............................................................................................................................................... 17 3.7 DynLoadZIPFreq ................................................................................................................................ 17 3.8 DynLoadUDM .................................................................................................................................... 18 3.9 FREQBUS ........................................................................................................................................... 19 4. System Disturbance Summary ............................................................................................................ 20 References .................................................................................................................................................. 21 1. User Instruction 1.1 Main interface The main user interface of SimAGC will be launched after double clicking “SimAGC.jar” file in your installation folder. Open case Change setting Execute simulation Execute power flow Display simulation results Simulation progress Control panel Stop simulation Model explorer panel Progress message panel Fig.1.1 Main user interface of SimAGC Three major panels can be found in the main interface, and they area: 1. Control panel: used to load case, change setting, execute power flow and simulation, and check study results 2. Model explorer panel: used to explore both power flow and dynamic data in the loaded case for data sanity checking; 3. Progress message panel: display information associated with power flow calculation and dynamic simulation. 1.2 Load case After clicking the “Open case” icon on the tool bar (or go to “Case”‐>”Load” in the menu), the following case loading page pops up. 1 Fig. 1.2 Case loading page Regardless of the type of study, power flow file (*.raw) is mandatory, and it needs to be defined per the format summarized in section 2. The default formats for dynamic data and contingency file are .dyr and .con, respectively. For more detail, please refer to section 3. 1.3 Study setting configuration After loading the case, the setting for power flow computation and dynamic simulation need to be configuration. The following window will pop up if the “Change setting” icon (or the same option in menu) is selected. Load freq. dependency coefficient ZIP coefficient Fig1.3 Case setting page 2 A brief summary of all the settings available are as follows: System Base [MVA]: the system MVA base; PF Tolerance [pu]: the convergence tolerance for power flow calculation; Max PF Iteration: the maximum iteration allowed before power flow is converged; PF Voltage Loop: if checked, the voltage regulation (i.e., generator, tap‐change transformer, and switchable shunts) functions are enabled; and the controllable variables of regulating devices will be adjusted so that the voltages of regulated buses reach their targeting values. Reg. Volt. Toleration [pu]: the tolerance for regulating voltages Ending Time [s]: the ending time for dynamic simulation Dyn. Tolerance: the convergence tolerance for dynamic simulation at each integration step; Max Dyn. Iteration: the maximum iteration allowed before dynamic simulation is converged at each integration step; Max Time Step [s]: the maximum integration step for dynamic simulation; Jacobian update: the option to select different Jacobian matrix update methods for dynamic simulation. The current version only supports detailed Newton‐Raphson method which is updated at each integration step; Load Conversion: if checked, all the loads in power flow solution will be converted to specified ZIP models according to the composite of ZIP models defined in the “ZIP Coefficient” section in Fig. 1.3. Please refer to Section 3 for more detail. Load Freq. Component: if checked, the loads in dynamic simulation will be varied with bus frequency by the coefficient defined in “Load freq. dependency coefficient” section in Fig. 1.3. 1.4 Solve power flow After case being loaded, click “Run power flow” icon (or go to the same option in “Run”‐>”Run PF”) to execute power flow computation. Once the power flow is solved, all the solutions in the model tabulate (e.g., bus angel, voltage magnitude, generator MW and MVar output, branch MW and MVar flows, etc.) will be updated. 3 Fig. 1.3 Power flow solution output 1.5 Run dynamic simulation After power flow is converged, dynamic simulation can be initialized by clicking the “Start simulation” icon (or go to “Run”‐>”Run simulation”). The simulation progress bar will be updated as the indication of the progress. Fig. 1.4 Dynamic simulation exestuation page 4 1.6 Check simulation results After simulation is completed, click “Plot results” icon (or go to “Result”‐>”Plot”) to open the results page. On this page, as many variables as wanted (for multiple variables, they must belong to the same category) can be selected for plotting. After output variable being selected, click “Plot” button; then the variables will be exported in the plotting area. Select reference generator to plot relative rotor angle Fig. 1.5 Simulation result display window Note: for generator rotor angle variables, a reference generator can be selected in the drop‐down combo box. All the variables listed in the variable tree on the left panel can be exported to .dat file by going to “Result”‐>”Save” in menu bar. The exported file, named “Result.dat”, will be saved to the folder of loaded case. 5 2. Power Flow Data Format Summary In this section, the power flow data format is summarized. In SimAGC, PSS/E PTI V30 data format is adopted. For more detail, please refer to PSS/E power flow manual [1]. A summary of different sections in the power flow file is depicted in Fig. 2.1. Fig. 2.1 Power flow data categories [1] 6 In current version of SimAGC, the following types of data are partially supported: bus data, generator data, non‐transformer branch data, transformer (two‐winding) data, area data, switched shunt data, zone data, and owner data. For more detail, please refer to the following sections, which are taken from ref [1]. 2.1 Bus data Parameters I NAME BASKV IDE Unit ‐ ‐ kV ‐ GL BL AREA ZONE VM VA OWNER MW MVar ‐ ‐ pu deg ‐ Description Bus number Bus name Bus base voltage in kV Bus type: 1 – load bus; 2 – generator bus; 3 swing bus; 4‐ disconnected bus MW component of bus shunt admittance at 1.0 pu volt. MVar component of bus shunt admittance at 1.0 pu volt. Area number Zone number Bus voltage magnitude Bus voltage phase angle Owner number Comments The generic representation of a bus in power flow is shown in Fig. 2.2. Fig. 2.2 Generic bus representation Bus data template: I, ‘NAME’, BASKV, IDE, GL, BL, AREA, ZONE, VM, VA, OWNER 2.2 Load data Parameters I ID STATUS AREA ZONE PL QL IP Unit ‐ ‐ ‐ ‐ ‐ MW MVar MW Description Bus number Load ID (one‐ or two‐character) Initial load status: 1 – in service; 0 – out‐of‐service Area number Zone number MW component of constant MVA load MVar component of constant MVA load MW component of constant current load at 1.0 pu voltage Comments 7 IQ YP YQ OWNER MVar MW MVar ‐ MVar component of constant current load at 1.0 pu volt. MW component of constant admittance load at 1.0 pu volt. MVar component of constant admittance load at 1.0 pu volt. Owner number The generic representation of a load in power flow is shown in Fig. 2.3. Fig.2.3 Generic load representation Load data template: I, ‘ID’, STATUS, AREA, ZONE, PL, QL, IP, IQ, YP, YQ, OWNER 2.3 Generator data Parameters I ID PG QG QT QB VS IREG MBASE ZR ZX RT XT GTAP STAT RMPCT PT PB Q1 F1 Q2 F2 Q3 F3 Unit ‐ ‐ MW MVar MVar MVar pu ‐ MVA pu pu pu pu ‐ ‐ ‐ MW MW ‐ ‐ ‐ ‐ ‐ ‐ Description Bus number Generator ID (one‐ or two‐character) MW output MVar output Maximum MVar output Minimum MVar output Regulated voltage setpoint Regulated bus number (0 – generator regulates its own volt.) Generator MVA base Resistance of machine impedance on MBASE base Reactance of machine impedance on MBASE base Resistance of step‐up transformer impedance on MBASE base Reactance of step ‐up transformer impedance on MBASE base Step‐up transformer off‐nominal turns ratio Status of generator: 1 – in service; 0 – out of service Percentage of the total MVars required to hold voltage at IREG Maximum generator MW output Minimum generator MW output 1st Owner number Faction of total ownership assigned to 1st owner 2nd Owner number Faction of total ownership assigned to 2nd owner 3rd Owner number Faction of total ownership assigned to 3rd owner Comments Not support Not support Not support 8 Q4 F4 ‐ ‐ 4st Owner number Faction of total ownership assigned to 4st owner Generator data template: I, ‘ID’, PG, QG, QT, QB, VS, IREG, MBASE, ZR, ZX, RT, XT, GTAP, STAT, RMPCT, PT, PB, Q1, F1, Q2, F2, Q3, F3, Q4, F4 2.4 Nontransformer branch data Parameters I J CKT R X B RATEA RATEB RATEC GI BI GJ BJ ST LEN O1 F1 O2 F2 O3 F3 O4 F4 Unit ‐ ‐ ‐ pu pu pu MVA MVA MVA pu pu pu pu ‐ ‐ ‐ ‐ ‐ ‐ ‐ ‐ ‐ ‐ Description Branch “from bus” number Branch “to bus” number Branch circuit ID (one‐ or two‐character) Branch resistance on system base Branch reactance on system base Total branch charging susceptance 1st loading rating 2nd loading rating 3rd loading rating Conductance of line shunt at bus “I” Susceptance of line shunts at bus “I” Conductance of line shunt at bus “J” Susceptance of line shunts at bus “J” Initial branch status (1 ‐ in service; 0 – out‐of‐service) Line length 1st Owner number Faction of total ownership assigned to 1st owner 2nd Owner number Faction of total ownership assigned to 2nd owner 3rd Owner number Faction of total ownership assigned to 3rd owner 4st Owner number Faction of total ownership assigned to 4st owner Comments The generic representation of a non‐transformer branch in power flow is shown in Fig. 2.4. Fig. 2.4 Equivalent PI model of non‐transformer branch 9 Non‐transformer branch data template: I, J, ‘CKT’, R, X, B, RATEA, RATEB, RATEC, GI, BI, GJ, BJ, ST, LEN, O1, F1,O2, F2, O3, F3, O4, F4 2.5 Transformer data In SimAGC, only two‐winding transformers are supported at current development stage. A two‐winding transformer data have the following four sections: Section 1 Parameters I J K CKT CW Unit ‐ ‐ ‐ ‐ ‐ CZ CM ‐ MAG1 MAG2 NMETR pu Pu NAME STAT Oi (i=1,…4) Fi (i=1,…4) Section 2 Parameters R1‐2 X1‐2 SBASE1‐2 Section 3 Parameters WINDV1 NOMV1 ANG1 RATA1 RATB1 RATC1 COD1 Comments Not support ‐ ‐ ‐ ‐ Description Number of the first‐winding bus Number of the second‐winding bus Number of the third‐winding bus Branch circuit ID (one‐ or two‐character) Winding data I/O code ( default CW = 1, off‐nominal turns ration in pu of winding bus base voltage) Impedance data I/O code (1 – resistance and reactance in pu on system base; 2 – resistance and reactance in pu on SBASE1‐2 base) Magnetizing admittance I/O code (1 – admittance in pu on system base; 2 – admittance in pu on SBASE1‐2 base) Magnetizing conductance Magnetizing susceptance Non‐metered end code (1‐for the winding one bus) or 2 ( for the winding two bus) Transformer identifier Transformer status (1‐ in service; 0 – out‐of‐service) ith owner number Fraction of total ownership assigned to owner Oi Unit pu pu MAV Description Resistance of impedance between first and second winding Reactance of impedance between first and second winding Winding one to two base MVA Comments Unit ‐ kV deg MVA MVA MVA ‐ Description Winding one off‐nominal turns ration in pu (depends on CW) Rated winding one voltage in kV Winding one phase shift angles in degrees 1st MVA rating of winding one 2nd MVA rating of winding one 3rd MVA rating of winding one Control model (1 for voltage control, applied in power flow Comments Not support 10 CONT1 RMA1 RMI1 VMA1 VMI1 NTP1 TAB1 CR1 ‐ ‐ ‐ ‐ ‐ ‐ ‐ pu CX1 pu calculation when enabled; 0 – no control) Bus number of the bus under transformer regulation Upper limit of off‐nominal turns ration for voltage regulation Lower limit of off‐nominal turns ration for voltage regulation Upper limit of voltage regulation target Lower limit of voltage regulation target Number of tap positions Number of a transformer impedance correction table Resistance of load drop compensation impedance in pu on system base Reactance of load drop compensation impedance in pu on system base Not support Not support Not support Not support Section 4 Parameters WINDV2 NOMV2 Unit ‐ ‐ Description Winding two off‐nominal turns ratio Rated winding two voltage in kV Comments Fixed at 1.0 Two‐winding transformer data template: I, J, K, CKT, CW, CZ, CM, MAG1, MAG2, NMETR, ‘NAME’, STAT, O1, F1, O2, F2, O3, F3, O4, F4 R1‐2, X1‐2, SBASE1‐2 WINDV1, NOMV1, ANG1, RATA1, RATB1, RATC1, COD1, CONT1, RMA1, RMI1, VMA1, VMI1, NTP1, TAB1, CR1, CX1 WINDV2, NOMV2 2.6 Switchable shunt data Parameters I MODSW Unit ‐ ‐ Description Comments Bus number Control mode (0‐ fixed; 1 – discrete adjusted; 2‐ continuous adjustment; 3, 4, 5 – discrete adjustment)* VSWHI pu Controlled voltage upper limit VSWLO pu Controlled voltage lower limit SWREM ‐ Number of bus under voltage regulation (0‐ self‐regulation) RMPCT % Percentage of the total MVar available for volt. regulation RMINDT ‐ Not used BINIT pu Initial switched shunt admittance at 1.0 pu Ni (i=1,..,8) ‐ Number of step for block i Bi (i=1,…,8) MVar Admittance increment of each of Ni step in block i at 1.0 pu Note: for the sake of simplicity, type 1, 3, 4, 5 of switched shunts will be modeled as type 2; therefore, the total MVar of all blocks (i=1,…,8) will be used for voltage regulation calculation. Switchable shunt data template: 11 I, MODSW, VSWHI, VSWLO, SWREM, RMPCT, RMINDT, BINIT, N1, B1, N2, B2, N3, B3, N4, B4, N5, B5, N6, B6, N7, B7, N8, B8 2.7 Area data Parameters I ISW PDES PTOL ARNAME Unit ‐ ‐ MW MW ‐ Description Area number Bus name of the area slack bus for area interchange control Desired net interchange leaving the area “I” Interchange tolerance bandwidth Area name Comments Not support Not support Not support Area data template: I, ISW, PDES, PTOL, ‘ARNAME’ 2.8 Zone data Parameters I ZONAME Unit ‐ ‐ Description Zone number Zone name Comments Description Owner number Owner name Comments Zone data template: I, ‘ZONAME’ 2.9 Owner data Parameters I OWNAME Unit ‐ ‐ Owner data template: I, ‘OWNAME’ 12 3. Dynamic Model Summary 3.1 GENCLS Constant Internal Voltage Generator Model Parameters Unit Description H s Inertia* D ‐ Damping constant* X’d pu Loaded from power flow data ra pu Loaded from power flow data * on machine MVA base Comments GENCLS data template: I, ‘GENCLS’, ID, H, D/ Xd' ra Vt V f Fig. 3.1 Circuit model of GENCLS 3.2 GENROU Round Rotor Generator Model (Quadratic Saturation) Parameters T’d0 T’’d0 T’q0 T’’q0 H D Xd Xq X’d X’q X’’d =X’’q Xl S(1.0) Unit s s s s s ‐ pu pu pu pu pu pu ‐ Description d‐axis transient open‐circuit time constant d‐axis sub‐transient open‐circuit time constant q‐axis transient open‐circuit time constant q‐axis sub‐transient open‐circuit time constant Inertia* Damping constant* d‐axis synchronous reactance* q‐axis synchronous reactance* d‐axis transient reactance* q‐axis transient reactance* d‐axis sub‐transient reactance* Stator leakage reactance* Saturation coefficient at flux = 1.0 Comments 13 S(1.2) ‐ Saturation coefficient at flux = 1.2 ra pu Loaded from power flow data * on machine MVA base GENROU data template: I,'GENROU',ID ,T’d0, T’’d0,T’q0, T’’q0, H, D, Xd, Xq, X’d, X’q, X’’d, Xl, S(1.0), S(1.2), ra/ X d" X l X d' X l E fd 1 Td' 0 s Td"0 s E q' E q" X d' X d" X ' d Xl d" X d' X d" 1 X d' X l X d' X l 2 X d X d' id d" d"2 q"2 "2 d "2 q q" X q X l d"2 q"2 X d X l X q X q' iq X q' X q" X 1 Tq' 0 s E d' ' q Xl X q' X l 2 1 E d" Tq"0 s X q' X q" q" X q' X l X q" X l X q' X l Fig.3.2 Block diagram of GENROU [2] 14 3.3 ESDC1A IEEE Type DC1A Excitation Systems Parameters TR KA TA TB TC VRMAX VRMIN KE TE KF TF1 Switch E1 SE(E1) E2 SE(E2) Unit sec ‐ sec sec sec pu pu ‐ sec ‐ sec ‐ ‐ ‐ ‐ ‐ Description Voltage sensor time constant Regulator gain Regulator time constant Lead‐lag block time constant Lead‐lag block time constant Regulator upper limit Regulator lower limit Field circuit feedback gain Field circuit time constant Rate feedback gain Rate feedback time constant Obsolete Saturation point 1 Saturation coefficient at E1 Saturation point 2 Saturation coefficient at E2 Comments ESDC1A data template: I, 'ESDC1A', ID, TR, KA, TA, TB, TC, VRMAX, VRMIN, KE, TE, KF, TF1, Switch, E1, SE(E1), E2, SE(E2) / Fig.3.3 Block diagram of ESDC1A[3] 3.4 ESAC4A IEEE Type AC4A Excitation System Parameters TR Unit sec Description Voltage sensor time constant Comments 15 VIMAX VIMIN TC TB KA TA VRMAX VRMIN KC pu pu sec sec ‐ sec pu pu ‐ Voltage reference upper limit Voltage reference lower limit Lead‐lag time constant Lead‐lag time constant Regulator gain Regulator time constant Exciter voltage upper limit Exciter voltage lower limit Limit coefficient fixed to 0.000 ESAC4A data template: I, 'ESAC4A', ID, TR, VIMAX, VIMIN, TC, TB, KA, TA, VRMAX, VRMIN, KC/ Fig.3.4 Block diagram of ESAC4A[3] 3.5 TGOV1 Steam Turbine‐Governor Parameters Unit R ‐ T1 sec VMAX pu VMIN pu T2 sec sec T3 Dt pu * on machine MVA base Description Droop gain* Regulator time constant Regulator upper limit* Regulator lower limit* Lead‐lag time constant Lead‐lag time constant Speed deviation forward gain* Comments TGOV1 data template: I, 'TGOV1', ID, R, T1, VMAX, VMIN, T2, T3, Dt/ 16 VMAX 1 sT2 1 sT3 1 1 sT1 Pref (Machine base) 1/ R MVAMachine MVAsys Pm (System base) VMIN Dt Fig.3.5 Block diagram of TGOV1 modified [3] 3.6 IEEEG2 IEEE Type 2 Speed‐Governing Model Parameters Unit K ‐ T1 sec T2 sec sec T3 PMAX pu pu PMIN T4 sec * on machine MVA base Description Regulator gain* Regulator time constant Lead‐lag block time constant Lead‐lag block time constant Gate position upper limit* Gate position lower limit* Water starting time constant Comments IEEEG2 data template: I, 'IEEEG2', ID, K, T1, T2, T3, PMAX, PMIN, T4/ Pref PMAX K (1 sT2 ) (1 sT1 )(1 sT3 ) 1 sT4 1 0.5sT4 MVAMachine MVAsys PMIN Pm Fig. 3.6 Block diagram of IEEEG2modified [3] 3.7 DynLoadZIPFreq Static Load Model for Simulation with ZIP and Frequency Dependence Parameters ap bp cp aq Unit % % % % Description Perc. of constant impedance component of active load Perc. of constant current component of active load Perc. of constant power component of active load Perc. of constant impedance component of reactive load Comments 17 bq % Perc. of constant current component of reactive load cq % Perc. of constant power component of reactive load Kpf ‐ Freq. coefficient for active load ‐ Freq. coefficient for reactive load Kqf Note: a uniform system‐wide setting needs to be specified in setting window and will be applied to all loads during simulation initialization. a p V 2 bp V c p PL ( f ,V ) P0 1 K pf f 100 V0 100 V0 100 aq V 2 bq V cq QL ( f ,V ) Q0 1 K qf f 100 V0 100 V0 100 where P0, Q0 and V0 are obtained from power flow solution. ∆f is in pu. 3.8 DynLoadUDM Dynamic Load Energized at Specific Time Parameters T0 Td Pinit Pfin Qinit Qfin τ Unit sec sec MW MW MVar MVar sec Description Load energizing time Load settling time Active load when energized Active load when settled Reactive load when energized Reactive load when settled Reactive load time constant Comments DynLoadUDM data template: I,'DYNLOADUDM', ID, T0, Td, Pinit, Qfin, Qinit, Qfin, τ/ 0, t T0 P Pfin t T0 , T0 t T0 Td P (t ) Pinit init Td Pfin , t T0 Td 0, t T0 Q (t ) Q Q Q 1 e init fin init t T0 , t T0 Note: DynLoadUDM needs to be modeled in power flow as an energized load with PL =0 and QL=0. 18 3.9 FREQBUS Enable to monitor the frequency at the specified bus during dynamic simulation. FREQBUS data template: I , 'FREQBUS'/ 19 4. System Disturbance Summary The following system disturbances can be specified in the contingency file (.con). All the data needs to be enclosed in the bracket and each data line should be ended with “;”. Generator MW output scheduling Example: change MW setting of generator at bus 4 (ID = U4) to 400 MW At time = (0.5) seconds, set generator MW at bus (4, U4) to (400) MW; Generator tripping Example: trip generator at bus 4 (ID = U4) At time = (0.5) seconds, trip generator at bus (1, U1); Line tripping Example: trip branch from bus 7 to 8 (ID = “1”) At time = (0.5) seconds, trip branch (7,8,1); Bus fault and clearance Example: bus fault impedance = 0 + j0.001 pu is applied to bus 6, cleared after 4 cycles by tripping line (7,8,1) At time = (0.5) seconds, apply fault at bus (6) with impedance (0.00, 0.001) pu, cleared after (4) cycles by tripping branch (7,8,1); Note: if the tripped branch is not specified, the fault will simply be cleared by removing the fault impedance. 20 References [1] PSS/E 30.1 User manual [2] PSS/E 30.1Volumn II, Program Application Guide [3] PSS/E 30.1 Model Library 21




© Copyright 2026