
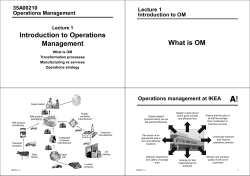
MRC I/O Structure Manual Yasnac MRC Controller Part Number 133400-1
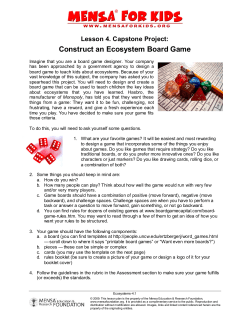
Yasnac MRC Controller MRC I/O Structure Manual Part Number 133400-1 October 24, 1995 MOTOMAN 805 Liberty Lane West Carrollton, OH 45449 TEL: 513-847-6200 FAX: 513-847-6277 24-HOUR SERVICE HOTLINE: 513-847-3200 The information contained within this document is the proprietary property of Motoman, Inc., and may not be copied, reproduced or transmitted to other parties without the expressed written authorization of Motoman, Inc. ©1995 by MOTOMAN Because we are constantly improving our products, we reserve the right to change specifications without notice. YASNAC and MOTOMAN are registered trademarks of YASKAWA Electric Manufacturing. TABLE OF CONTENTS Section Page 1.0 INTRODUCTION............................................................................................ 1 1.1 MRY01 BOARD................................................................................. 1 1.2 MIO01 and MIO02 BOARDS ............................................................2 1.3 MIO03 BOARD................................................................................. 2 1.4 MIO04 BOARD................................................................................. 2 1.5 MEW01 AND MEW02 BOARDS........................................................2 1.6 MARIO AND MIF05 BOARDS..........................................................2 1.7 MRC I/O BY MOTOMAN APPLICATION..........................................2 1.8 I/O RACK LOCATION........................................................................3 1.9 POWER SUPPLY ...............................................................................4 1.10 REFERENCE TO OTHER DOCUMENTATION ...................................4 1.11 CUSTOMER SERVICE INFORMATION.............................................4 2.0 DEDICATED I/O.............................................................................................5 2.1 EXTERNAL EMERGENCY STOP INPUT............................................6 2.2 SERVO ON INPUT ............................................................................7 2.3 EXTERNAL HOLD INPUT .................................................................8 2.4 REMOTE MODE SELECT INPUT.......................................................9 2.5 SERVO ON OUTPUT....................................................................... 10 2.6 SHOCK SENSOR INPUT................................................................. 11 3.0 MIO03 AND MIO04 BOARDS..................................................................... 13 3.1 TRANSISTOR INPUTS.................................................................... 13 3.1.1 3.1.2 3.2 Input Connections............................................................. 13 Input Conditions................................................................ 13 RELAY OUTPUTS............................................................................ 15 3.2.1 3.2.2 Output Relay Description................................................... 15 Output Connections........................................................... 16 4.0 MIO01 AND MIO02 BOARDS..................................................................... 17 4.1 TRANSISTOR INPUTS.................................................................... 17 4.2 TRANSISTOR OUTPUTS................................................................. 18 5.0 MRC I/O ALLOCATION AND CONFIGURATION.........................................20 5.1 LOGICAL RELAY ADDRESSES.........................................................20 5.2 RULES AND LIMITATIONS............................................................. 21 5.3 MRC I/O ASSIGNMENTS BY APPLICATION..................................24 APPENDIX A - MRC I/O BLOCK DIAGRAMS................................................... A-1 INDEX ............................................................................................................ Index LIST OF FIGURES Figure Page Figure 1-1 Location of MRC I/O Boards ................................................................3 Figure 2-1 External Emergency Stop Input Connection..........................................6 Figure 2-2 Servo On Input Connection..................................................................7 Figure 2-3 External Hold Input Connection...........................................................8 Figure 2-4 Remote Mode Select Input Connection on an MIO04 Board.................9 Figure 2-5 Servo On Output Connection on an MIO04 Board ............................. 10 Figure 2-6 Connection Diagram Using the Shock Sensor for E-Stop Condition ..... 11 Figure 3-1 Input Connection on MIO04 Board.................................................... 14 Figure 3-2 Input Connections on MIO03 Board in Sinking and Sourcing Configurations.................................................................................... 14 Figure 3-3 MIO04 Output Relays ....................................................................... 15 Figure 3-4 MIO03 Output Relays ....................................................................... 15 Figure 3-5 MIO04 or MIO03 Board Output With DC Relay Coil ......................... 16 Figure 4-1 Input Connection on MIO01 Board .................................................... 17 Figure 4-2 Input Connection on MIO02 Board.................................................... 18 Figure 4-3 Output Connection on MIO01 Board.................................................. 18 Figure 4-4 Output Connection on MIO02 Board ................................................. 19 Figure 5-1 Setting Up Input and Output Addresses..............................................20 Figure 5-2 Example of Addressing With All I/O Slots Filled..................................22 Figure 5-3 Example of Addressing for an ArcWorld Product With One Additional Board ................................................................................................23 LIST OF TABLES Table Page Table 2-1 How to Place Jumpers on Pins for Shock Sensor Input........................ 12 Table 5-1 Inputs for Arc Welding Using Two MIO04 Boards...............................25 Table 5-2 Outputs for Arc Welding Using Two MIO04 Boards............................26 Table 5-3 Inputs for General or Universal Applications Using Two MIO04 Boards .............................................................................27 Table 5-4 Outputs for General or Universal Applications Using Two MIO04 Boards .............................................................................28 Table 5-5 Inputs for Spot Welding Using Two MIO04 Boards .............................29 Table 5-6 Outputs for Spot Welding Using Two MIO04 Boards...........................30 Table 5-7 Inputs for Material Handling Using Two MIO04 Boards ..................... 31 Table 5-8 Outputs for Material Handling Using Two MIO04 Boards...................32 1.0 INTRODUCTION Motoman robots with MRC controllers have a variety of dedicated and standard inputs and outputs (I/O). The I/O is used for controlling the robot and for interfacing it to external equipment. The MRC software can support up to 144 inputs and 144 outputs, as well as 4 analog outputs. Depending upon the application, the first 16 to 24 inputs and the first 16 to 24 outputs are assigned as dedicated I/O for application- and robotspecific functions, such as Servo Power On, Hold, Alarm Reset, and Wire Shortage. The remainder can be user-defined I/O, and the amount available depends on the type and number of I/O boards installed in the MRC. This manual provides the following information about the MRC I/O structure: • Section 1.0 provides an overview of MRC I/O boards and describes their location in the MRC controller. • Section 2.0 describes MRC dedicated I/O and provides examples of electrical connections. • Section 3.0 describes the MIO03 and MIO04 boards and provides examples of electrical connections. • Section 4.0 describes the MIO01 and MIO02 boards and provides examples of electrical connections. • Section 5.0 contains MRC I/O allocation and configuration information and MRC I/O assignment tables for standard applications. • Appendix A contains MRC I/O block diagrams for standard arc welding, spot welding, universal, and handling applications. For more information about your system's I/O, refer to drawings in the Operator's Manual for your system. Refer to the YASNAC MRC Maintenance Manual for additional information on the MRY01, MIO01, MIO03, and MIO04 boards, including schematic drawings. ➪ CAUTION! The following I/O boards are static sensitive. Handling these boards without static protection can result in permanent product damage. Use static protection, such as static protective wrist straps, when handling these boards. 1.1 MRY01 BOARD The MRY01 board has input relays energized by 24 volts DC. This board is used for robot critical interlock signals, such as external Emergency Stop, Servo On, MRC I/O Structure Manual Page 1 MOTOMAN external Hold, and Overtravel. It also has four optically isolated transistor inputs (DIN0 through DIN3) that are mapped directly into the CPU for fast input response. These inputs are intended for use by Motoman only, for special options. This board is standard in all MRC controllers. 1.2 MIO01 and MIO02 BOARDS These boards support 32 optically isolated transistor inputs and 32 transistor outputs. The MIO01 board has NPN (sinking) inputs and outputs, and the MIO02 board has PNP (sourcing) inputs and outputs. See Section 4.0 for additional information. 1.3 MIO03 BOARD The MIO03 board has 16 optically isolated transistor inputs, which can be wired in sinking or sourcing configuration, and 16 normally open, dry-relay contact outputs that are individually isolated. See Section 3.0 for additional information. 1.4 MIO04 BOARD The MIO04 board has 24 NPN (sinking), optically isolated transistor inputs and 24 normally open, dry-relay contact outputs. Unlike the MIO03 board, the output relays are arranged in groups of four with each group sharing one common termination point. See Section 3.0 for additional information. 1.5 MEW01 AND MEW02 BOARDS The MEW01 and MEW02 boards are analog output boards used in Motoman welding and painting applications. Each board supplies two analog, ± 14 volt DC output channels. The MEW01 board supplies 8-bit digital to analog (D/A) conversion. The MEW02 board supplies 12-bit D/A conversion. 1.6 MARIO AND MIF05 BOARDS The MARIO and MIF05 boards are for serial communication I/O. Each board can be configured to support up to 112 inputs and 112 outputs in increments of eight. The MARIO board is designed to interface to the Allen-Bradley Remote I/O (RIO) network cable Blue Hose. The MIF05 board is designed to interface to most other programmable logic controllers (PLC) by means of Y (Yaskawa) or T (Toyota) protocol. MRC I/O Structure Manual Page 2 MOTOMAN 1.7 MRC I/O BY MOTOMAN APPLICATION Although the type and number of I/O boards can vary according to the robotic application, the MRC controller typically has two MIO04 boards for the general applications, spot welding, and handling applications, and one MIO04 board for arc welding applications. For ArcWorld and FabWorld applications, the MRC controller typically has two MIO04 boards and one MEW02 board. MRC I/O Structure Manual Page 3 MOTOMAN 1.8 I/O RACK LOCATION The I/O rack for all the boards listed above is located on the MBB02 back board inside the MRC cabinet (see Figure 1-1). The MRY01 board, which is a standard board found in all MRC controllers, is always installed in Slot 00 of the I/O rack. Five additional slots (01 through 05) are available in the I/O rack for additional I/O boards. Except for MEW01 or MEW02 boards, all MRC I/O boards must be installed beginning with Slot 01. Always install a new board in the first empty slot after the MRY01 board. However, MEW01 and MEW02 boards must be installed in Slot 05. If a second MEW01 or MEW02 board is required, that board must be installed in Slot 04. In addition to the MRY01 board, the standard I/O board for the MRC is the MIO04 board, installed in Slot 01. Typically, for many Motoman applications, an additional MIO04 board or an MIO03 board might be installed in Slot 02. Always visually verify which I/O boards are in your MRC controller before planning changes or additions to your system. Inside of MRC Cabinet I/O Rack (MBB02 Back Board) MRY01 Board Additional I/O Boards (based on application) 00 02 03 04 05 MEW02-1 MIO03 CN2 CN2 TM1 TM1 Connector 01 MIO04 CN2 MRY01 CN2 Connector CN1 CN1 CN1 CN1 Connector Figure 1-1 Location of MRC I/O Boards MRC I/O Structure Manual Page 4 MOTOMAN 1.9 POWER SUPPLY The MRC controller has a 24-volt DC, 1-amp internal power supply. When using loads that exceed 1 amp, use an external 24-volt DC, regulated, linear transistor power supply. Refer to the YASNAC MRC Maintenance Manual for instructions on installing an external power supply. 1.10 REFERENCE TO OTHER DOCUMENTATION For additional information, refer to the following: 1.11 • Motoman MRC User Functions Manual (Part Number 132331-1) • YASNAC MRC Maintenance Manual (a section in the Motoman Robot Manipulator Manual for your system) • Motoman Operator's Manual for your system CUSTOMER SERVICE INFORMATION If you are in need of technical assistance, contact the Motoman service staff at (513) 847-3200 . Have the following information ready before you call: • Robot Type • System Number (located on the cover page of this manual) • Robot Serial Number (located on the back side of the robot arm) • Application Type (welding, handling, spot welding, or general use) MRC I/O Structure Manual Page 5 MOTOMAN 2.0 DEDICATED I/O The Motoman robots with MRC controllers have many dedicated inputs and outputs used for robot- and application-specific functions. Some are located on the MRY01 board. Typically, most of them are located on the board in Slot 01. Most applications use 16 to 24 inputs and 16 to 24 outputs for dedicated I/O. The actual number and use of some I/O can change based on how the robot is configured and its application. These dedicated inputs and outputs are used for controlling the robot and for interfacing it to external equipment. This section contains information on the following dedicated I/O: • External Emergency Stop Input • Servo On Input • External Hold Input • Remote Mode Select Input • Servo On Output • Shock Sensor Input Refer to the following for additional information about MRC dedicated I/O: ➪ • YASNAC MRC Maintenance Manual for additional information on the MRY01, MIO04, and MIO03 boards, including schematic drawings • Section 3.0 in this manual for specific information on the MIO04 board, including I/O circuit design • Motoman Operator's Manual for your system for specific MRC I/O drawings • Motoman MRC User Functions Manual for I/O addressing CAUTION! The boards discussed in this section are static sensitive. Handling these boards without static protection can result in permanent product damage. Use static protection, such as static protective wrist straps, when handling these boards. MRC I/O Structure Manual Page 6 MOTOMAN 2.1 EXTERNAL EMERGENCY STOP INPUT The external Emergency Stop (E-Stop) input puts the MRC in an E-Stop condition and turns off the servo power to the robot. This input is located on the MRY01 board. Typically, an external device such as a normally closed switch is connected across the input's connection points, as shown in Figure 2-1. Activating the switch signals the E-Stop condition to the MRC. One pair of connection points, terminal 23 and the 24-volt DC terminal on connector TM1, is used for the external E-Stop input. Any number of external devices can be connected in series to this input. When an external device is not connected to this input, the connection points for the input must be connected with a jumper wire. Refer to the YASNAC MRC Maintenance Manual for additional information on the MRY01 board and this input. Refer to the electrical drawings section of your Motoman Operator's Manual for the specific MRC I/O drawings for your system. ➪ WARNING To prevent injury to personnel or damage to equipment, check all safety equipment frequently for proper operation. ➪ CAUTION! Improper connections can damage the robot. Before making connections, check for proper voltages and currents. MRY01 Board +24 VU EXESP External E-STOP 1 Term.14,15,16, +24 VU 17, 24, or 25 External E-STOP 2 Terminal 23 EXESP R 0 VU +24 VU MRC I/O Structure Manual Page 7 MOTOMAN Figure 2-1 External Emergency Stop Input Connection MRC I/O Structure Manual Page 8 MOTOMAN 2.2 SERVO ON INPUT The Servo On input turns on servo power to the robot. This input is located on the MRY01 board. Typically, an external device such as a normally open momentary switch is connected across the input's connection points, as shown in Figure 2-2. Activating the switch signals the MRC to turn on servo power. One pair of connection points, terminal 21 and the 24-volt DC terminal on connector TM1, is used for the Servo On input. Refer to the YASNAC MRC Maintenance Manual for additional information on the MRY01 board and this input. Refer to the electrical drawings section of your Motoman Operator's Manual for the specific MRC I/O drawings for your system. ➪ CAUTION! Improper connections can damage the robot. Before making connections, check for proper voltages and currents. MRY01 Board Servo On +24 VU EXSVON Term. 14,15,16, +24 VU 17, 24, or 25 Terminal 21 EXSVON R 0 VU Figure 2-2 Servo On Input Connection MRC I/O Structure Manual Page 9 MOTOMAN 2.3 EXTERNAL HOLD INPUT The external Hold input stops robot motion by placing the MRC in a Hold condition. This input is located on the MRY01 board. Typically, an external device such as a normally closed switch or relay is connected across the input's connection points, as shown in Figure 2-3. Activating the external device signals the Hold condition to the MRC. One pair of connection points, terminal 22 and the 24-volt DC terminal on connector TM1, is used for the external Hold input. Any number of external devices can be connected in series to this input. When an external device is not connected to this input, the connection points for the input must be connected with a jumper wire. Refer to the YASNAC MRC Maintenance Manual for additional information on the MRY01 board and this input. Refer to the electrical drawings section of your Motoman Operator's Manual for the specific MRC I/O drawings for your system. ➪ WARNING! Robot Hold does NOT remove servo power. The Hold condition only stops robot motion. Use the E-STOP button to stop the robot before entering the robot cell. The robot and other equipment can move unexpectedly, which can cause severe personal injury or death, as well as damage to the robot! MRY01 Board +24 VU EXHOLD R External HOLD Term. 14, 15, 16, +24 VU 17, 24, or 25 Terminal 22 EXHOLD 0 VU Figure 2-3 External Hold Input Connection +24 VU MRC I/O Structure Manual Page 10 MOTOMAN 2.4 REMOTE MODE SELECT INPUT The Remote Mode Select input must be active before the Teach or Play mode can be activated from a remote external device, such as an operator station or a PLC. This input is located on the board installed in Slot 01. An external device such as a normally open switch is connected to the input's connection points, as shown in Figure 2-4. Activating the external device inputs a signal to the system's concurrent I/O. The system uses this signal to determine if it will allow the Teach or Play mode to be activated remotely. This input must remain active while either of these modes is in use. For an MIO04 board, the connection points for the Remote Mode Select input is terminal 2-B3 and 0 volts DC (common) on connector CN2. ➪ CAUTION! Improper connections can damage the robot. Before making connections, check for proper voltages and currents. MIO04 Board 24 VU Remote Mode Select Terminal 2-B3 0 VU Figure 2-4 Remote Mode Select Input Connection on an MIO04 Board MRC I/O Structure Manual Page 11 MOTOMAN 2.5 SERVO ON OUTPUT The Servo On output is used to signal external equipment that the robot is ready. This output is turned on when the servo power is turned on. This output is NOT the same as the emergency stop (E-Stop). The Servo On output is turned off when any one of the following conditions occurs: ➪ • The E-Stop button on the MRC front panel is pressed. • The E-Stop button on the MRC teach pendant is pressed. • The external E-Stop connection between terminal 23 on the MRY01 board and 24 volts DC is opened (see Section 2.1). • MRC power is turned OFF. • The tool mount shock sensor is impacted (optional). • Servo power is OFF. CAUTION! The SERVO ON output must NOT be used in an external E-STOP loop. On an MIO04 board, the connection points for the Servo On output are terminals 2-A9 and 2-A8/2-B8 on connector CN2, as shown in Figure 2-5. NOTE: The relay shown below in Figure 2-5 must be rated for 24 volts DC and draw less than 50 mA of current. MIO04 Board Servo On Output Terminal 2-A9 R + D1 Output Common Terminal 2-A/B8 0V 24 VDC MRC I/O Structure Manual Page 12 MOTOMAN Figure 2-5 Servo On Output Connection on an MIO04 Board MRC I/O Structure Manual Page 13 MOTOMAN 2.6 SHOCK SENSOR INPUT The Shock Sensor input is located on the MTU01 board (see Figure 2-6). When a crash occurs, the shock sensor switch opens and places the MRC in an emergency stop (E-Stop) condition or a Hold condition. A jumper on the MRY01 board determines whether an E-Stop or Hold condition occurs. Typically, the jumper is factory set to the E-Stop condition. The Shock Sensor input is a separate input from the external E-Stop and external Hold inputs described in Sections 2.1 and 2.3. Table 2-1 shows how to jumper the pins on the MBB02 board when a sensor is used and when a sensor is not used. Table 2-1 also shows how to jumper the pins on the MRY01 board to cause either an E-Stop or Hold condition. Figure 2-6 shows the connections when the shock sensor is used for an E-Stop condition. Refer to the YASNAC MRC Maintenance Manual for additional information on the MTU01, MBB02, and MRY01 boards and this input. Refer to your Motoman Operator's Manual for specific information on shock sensor recovery after a robot collision. NOTE: The MTU01 board is mounted on the MTU02 board inside the MRC cabinet in the back, upper left corner above the MBB02 board . NOTE: A shock sensor override is located on MRY01 boards with a B designation; that is, MRY01B boards. MTU01 MBB02 + 24 V Robot Shock Sensor MRY01 + 24 V CN6 2 Normally Closed CN5 20 9 18 10 CN3 TM4 1 2 3 SW1 1 HOLD 2 3 E-STOP Figure 2-6 Connection Diagram Using the Shock Sensor for E-Stop Condition MRC I/O Structure Manual Page 14 MOTOMAN ➪ CAUTION! Improper connections can damage the robot. Before making connections, check for proper voltages and currents. ➪ CAUTION! The following boards are static sensitive. Handling these boards without static protection can result in permanent product damage. Use static protection, such as static protective wrist straps, when handling these boards. Table 2-1 How to Place Jumpers on Pins for Shock Sensor Input Shock Sensor MBB02 Board MRY01 Board For E-Stop (SERVO OFF), place jumper on pins 2 and 3 on SW1. Used Place jumper on pins 2 and 3 on TM4. For Hold, place jumper on pins 1 and 2 on SW1. Not Used MRC I/O Structure Manual Place jumper on pins 1 and 2 on TM4. Page 15 Place jumper on pins 1 and 2 or on pins 2 or 3 on SW1. Either setting is acceptable. MOTOMAN 3.0 MIO03 AND MIO04 BOARDS Depending on the I/O requirements of the application, most standard MRC controllers have two MIO04 boards. Each MIO04 board has 24 inputs and 24 outputs. If an application requires isolated relay outputs or a combination of sinking and sourcing inputs, an MIO03 board can be used. The MIO03 board has 16 inputs and 16 outputs. The inputs and outputs on both boards share the following characteristics: Input type: optically isolated transistor, rated at 24 volts DC, 5 mA (maximum) Output type: 0.5 ampere, 24 volt DC, normally open, dry-relay contact for DC voltage only Refer to the YASNAC MRC Maintenance Manual for additional information on the MIO04 and MIO03 boards, including schematic drawings. ➪ CAUTION! MIO03 and MIO04 boards are static sensitive. Handling these boards without static protection can result in permanent board damage. Use static protection, such as static protective wrist straps, when handling these boards. 3.1 TRANSISTOR INPUTS 3.1.1 Input Connections Each of the 24 inputs on the MIO04 board can be wired in a sinking configuration only. Figure 3-1 shows how to wire an input's single connection. Each of the 16 inputs on the MIO03 board can be wired in either a sinking or sourcing configuration. Figure 3-2 provides examples of how to wire an input's two connections in either a sinking configuration or a sourcing configuration. 3.1.2 Input Conditions Each transistor input is optically isolated, as shown in Figures 3-1 and 3-2. The input condition must remain stable for a minimum of 10 milliseconds (ms). The MRC scans the inputs, and if there is a change in logic, it scans a second time to confirm the change. This eliminates relay contact bounce that might occur and give MRC I/O Structure Manual Page 16 MOTOMAN a false status indication. When the transistor is activated by either a switch, a contact, or a PLC, the input is confirmed approximately 20 ms later. The maximum current drawn is 5 mA for each input. Some PLCs require greater load current to keep their outputs energized. If relays are used to activate an input, use relays with crosspoint or bifurcated, redundant relay contacts. ➪ CAUTION! Improper connections can damage the robot. Before making connections, check for proper voltages and currents. MIO04 Board 24 VU 5 mA MAX External Connection 0 VU Figure 3-1 Input Connection on MIO04 Board MRC I/O Structure Manual Page 17 MOTOMAN MIO03 Board (Sourcing Input) MIO03 Board (Sinking Input) 24 VU 5 mA MAX 24 VU 5 mA MAX External Connections External Connections 0 VU 0 VU Figure 3-2 Input Connections on MIO03 Board in Sinking and Sourcing Configurations MRC I/O Structure Manual Page 18 MOTOMAN 3.2 RELAY OUTPUTS 3.2.1 Output Relay Description The output relays on both MIO04 and MIO03 boards have a rating of 0.5 ampere, 24 volts DC. The relays have normally open, dry-relay contacts, rated for DC voltage only. If an application requires AC voltage control, use an external relay to control the AC voltage. On the MIO04 board, the 24 output relays are divided into six groups of four relays, with each group sharing one common termination point, as shown in Figure 3-3. On the MIO03 board, all 16 output relays are isolated from each other, as shown in Figure 3-4. 0 V or 24 V Output Internal MIO04 Output Relays External Connections Output Output Output Figure 3-3 MIO04 Output Relays 0 V or 24 V Output 0 V or 24 V Internal MIO03 Output Relays Output 0 V or 24 V External Connections Output 0 V or 24 V Output MRC I/O Structure Manual Page 19 MOTOMAN Figure 3-4 MIO03 Output Relays 3.2.2 Output Connections Figure 3-5 provides an example of an output connection. Typically, 24-volt-DC relays are connected to the internal hard relay contacts. Relays should be selected with the voltage and current rating based on application and typical loads. Even though the output relay rating is 0.5 ampere (maximum), the contact can be damaged by high voltage transients caused by the inductive kick of relay coils. To prevent such damage, apply a "fly back" diode across the DC relay coil, as shown in Figure 3-5. NOTE: If the relay has an LED indicator, add 5-10 mA to total relay current draw and observe the coil and LED polarity. ➪ CAUTION! Improper connections can damage the robot. Before making connections, check for proper voltages and currents. MIO03 or MIO04 Board External Relay Output R + 24 VDC, 0.5 A MAX D1 Output Common Figure 3-5 MIO04 or MIO03 Board Output With DC Relay Coil MRC I/O Structure Manual Page 20 MOTOMAN 4.0 MIO01 AND MIO02 BOARDS Depending on the I/O requirements of the application, the MRC controller might have an MIO01 or MIO02 board. The MIO01 board has 32 NPN (sinking) transistor inputs and 32 NPN (sinking) transistor outputs. The MIO02 board has 32 PNP (sourcing) transistor inputs and 32 PNP (sourcing) transistor outputs. The inputs and outputs on both boards share the following characteristics: Input Type: optically isolated transistor, rated at 24 volts DC, 5 mA (maximum) Output Type: transistor, rated at 24 volts DC, 50 mA (maximum) Refer to the YASNAC MRC Maintenance Manual for additional information on the MIO01 board, including a schematic drawing. ➪ CAUTION! MIO01 and MIO02 boards are static sensitive. Handling these boards without static protection can result in permanent board damage. Use static protection, such as static protective wrist straps, when handling these boards. 4.1 TRANSISTOR INPUTS Each input has only one connection. Figure 4-1 shows how to wire an input connection on an MIO01 board. Figure 4-2 shows how to wire an input connection on an MIO02 board. ➪ CAUTION! Improper connections can damage the robot. Before making connections, check for proper voltages and currents. MRC I/O Structure Manual Page 21 MOTOMAN MIO01 Board 24 VU 5 mA MAX External Connection 0 VU Figure 4-1 Input Connection on MIO01 Board MIO02 Board 24 VU 5 mA MAX External Connection 0 VU Figure 4-2 Input Connection on MIO02 Board 4.2 TRANSISTOR OUTPUTS The MIO01 board has NPN (sinking) transistor outputs, as shown in Figure 4-3, and the MIO02 board has PNP (sourcing) transistor outputs, as shown in Figure 4-4. Both types of outputs are rated at 24 volts DC, 50 mA (maximum). To prevent damage to the output transistors, apply a "fly back" diode across a DC relay coil, as shown in Figures 4-3 and 4-4, to suppress the high voltage when the relay coil is de-energized. A transistor can easily be damaged by DC relay high voltage transients caused by inductive relay coils. The maximum current allowed for either type of transistor is 50 mA. Do not exceed 50 mA, or the board can be damaged seriously. ➪ CAUTION! MRC I/O Structure Manual Page 22 MOTOMAN Improper connections can damage the robot. Before making connections, check for proper voltages and currents. MIO01 Board External Relay Output R 24 VDC MAX, 50 mA D1 0 VU Figure 4-3 Output Connection on MIO01 Board MIO02 Board 24 VDC MAX, 50 mA External Relay Output R D1 0 VU Figure 4-4 Output Connection on MIO02 Board MRC I/O Structure Manual Page 23 MOTOMAN 5.0 MRC I/O ALLOCATION AND CONFIGURATION 5.1 LOGICAL RELAY ADDRESSES MRC I/O logical relay addressing is based on the octal number system, which has a base of eight. (The number system that we commonly use has a base of ten.) For all practical purposes, that simply means addresses are divided into groups of eight consecutive numbers. The first address in each group ends with a zero (for example, 2010) and the last address in the group ends with a seven (for example, 2017). Addresses for inputs are 2000-series numbers and range from 2010 to 2187. Addresses for outputs are 3000-series numbers and range from 3010 to 3187. Figure 5-1 shows a typical address configuration for an MRC I/O board. MIO04 Board 24 Inputs 24 Outputs Slot 01 MIO04 Addresses for Inputs are 2000-series numbers Eight addresses per group First address in each group ends with a zero 2010 2011 2012 2013 2014 2015 2016 2017 2020 2021 2022 2023 2024 2025 2026 2027 2030 2031 2032 2033 2034 2035 2036 2037 Eight addresses per group 3010 3011 3012 3013 3014 3015 3016 3017 3020 3021 3022 3023 3024 3025 3026 3027 3030 3031 3032 3033 3034 3035 3036 3037 Last address in each group ends with a 7 Last address in each group ends with a 7 MIO04 Board has 24 Inputs requiring 3 groups of logical relay addresses (24/8 = 3). MRC I/O Structure Manual Addresses for Outputs are 3000-series numbers First address in each group ends with a zero Page 24 MIO04 Board has 24 Outputs requiring 3 groups of logical relay addresses (24/8 = 3). MOTOMAN Figure 5-1 Setting Up Input and Output Addresses MRC I/O Structure Manual Page 25 MOTOMAN 5.2 RULES AND LIMITATIONS 5.2.1 Available Slots in I/O Rack MRC software is capable of supporting up to 144 inputs and 144 outputs. However, the amount of actual I/O is limited by the number of available slots in the I/O rack (refer to Section 1.8 for additional information about the I/O rack). Because an MRY01 board always occupies Slot 00, only five slots remain for dedicated I/O and user-defined I/O. As shown in the example in Figure 5-2, the I/O rack can be filled completely without using all available inputs and outputs. 5.2.2 Board Location and Addressing Figures 5-2 and 5-3 demonstrate several important details about board location and addresses: 5.2.3 • Except for the MEW02 board in Figure 5-3, the logical relay addresses are consecutive, beginning with the lowest addresses in Slot 01 and ending with the highest addresses in Slot 05. Keep in mind that each new board must be installed in the next available slot after the MRY01 board. • The MEW02 (or MEW01) board, which must be located in Slot 05, uses the following logical relay addresses: 2170 - 2177 (input addresses) and 3170 3177 (output addresses). In a welding system, the default setting assumes that an MEWO board is in the last slot. If a second MEWO board is needed, it must be installed in Slot 04 and use the last two sets of addresses: 2180 - 2187 and 3180 - 3187. • If one or two MEW02 (or MEW01) boards are installed in the I/O rack, the maximum number of I/O supported by the MRC software is reduced to 128 inputs and 128 outputs. A total of 16 inputs and 16 outputs and the logical relay addresses 2170 - 2177, 2180 - 2187, 3170 - 3177, and 3180 - 3187 are utilized even if only one MEW0 board is installed. • The number of addresses used by a board are based on the number of inputs and outputs on the board, even if all the inputs and outputs are not used in the application. For example, in Figure 5-2, the MIO01 board in Slot 02 might use only 24 of its 32 outputs to control devices. Yet, because the board has 32 outputs, 32 addresses are reserved. Determining the Amount of User-Defined I/O The amount of user-defined I/O available depends on the type and number of I/O boards installed in the I/O rack. As shown in Figures 5-2 and 5-3, the combination of I/O boards can vary. In addition, dedicated I/O typically uses the first 16 to 24 inputs and the first 16 to 24 outputs for application- and robot-specific functions. (The Remote Mode Select MRC I/O Structure Manual Page 26 MOTOMAN Input and the Servo On Output, described in Sections 2.4 and 2.5, respectively, are examples of dedicated I/O.) In an arc welding application, for example, the first 16 inputs and 16 outputs are reserved for dedicated I/O. Figure 5-3 shows an arc welding application with MRC I/O Structure Manual Page 27 MOTOMAN MIO04 Board MRY01 Board 24 Inputs (always in Slot 00) 24 Outputs MIO01 Board 32 Inputs 32 Outputs MIO02 Board 32 Inputs 32 Outputs MIO04 Board 24 Inputs 24 Outputs MIO03 Board 16 Inputs 16 Outputs Slot 00 Slot 01 Slot 02 Slot 03 Slot 04 Slot 05 MRY01 MIO04 MIO01 MIO02 MIO04 MIO03 * The first 24 Inputs use these ADDRESSES: 2010 - 2017 = 8 Inputs 2020 - 2027 = 8 Inputs 2030 - 2037 = 8 Inputs Total = 24 Inputs * The first 24 Outputs use these ADDRESSES: 3010 - 3017 = 8 Outputs 3020 - 3027 = 8 Outputs 3030 - 3037 = 8 Outputs Total = 24 Outputs The next 32 Inputs use these ADDRESSES: 2080 - 2087 = 8 Inputs 2090 - 2097 = 8 Inputs 2100 - 2107 = 8 Inputs 2110 - 2117 = 8 Inputs Total = 32 Inputs The next 16 Inputs use these ADDRESSES: 2150 - 2157 = 8 Inputs 2160 - 2167 = 8 Inputs Total = 16 Inputs The next 16 Outputs use these ADDRESSES: 3150 - 3157 = 8 Outputs 3160 - 3167 = 8 Outputs Total = 16 Outputs The next 32 Outputs use these ADDRESSES: 3080 - 3087 = 8 Outputs 3090 - 3097 = 8 Outputs 3100 - 3107 = 8 Outputs 3110 - 3117 = 8 Outputs Total = 32 Outputs The next 24 Inputs use these ADDRESSES: 2120 - 2127 = 8 Inputs 2130 - 2137 = 8 Inputs 2140 - 2147 = 8 Inputs Total = 24 Inputs The next 32 Inputs use these ADDRESSES: 2040 - 2047 = 8 Inputs 2050 - 2057 = 8 Inputs 2060 - 2067 = 8 Inputs 2070 - 2077 = 8 Inputs Total = 32 Inputs The next 24 Outputs use these ADDRESSES: 3120 - 3127 = 8 Outputs 3130 - 3137 = 8 Outputs 3140 - 3147 = 8 Outputs Total = 24 Outputs The next 32 Outputs use these ADDRESSES: 3040 - 3047 = 8 Outputs 3050 - 3057 = 8 Outputs 3060 - 3067 = 8 Outputs 3070 - 3077 = 8 Outputs Total = 32 Outputs Total Inputs: 24 + 32 + 32 + 24 + 16 = 128 Total Outputs: 24 + 32 + 32 + 24 + 16 = 128 128 Inputs and 128 Outputs and all available I/O slots are used. * The first 16 to 24 inputs and outputs are used for dedicated I/O. Figure 5-2 Example of Addressing With All I/O Slots Filled MRC I/O Structure Manual Page 28 MOTOMAN MRY01 Board (always in Slot 00) MIO04 Board 24 Inputs 24 Outputs MIO04 Board 24 Inputs 24 Outputs MIO03 Board 16 Inputs 16 Outputs Empty Slot MEW02 Board (When used, place in last slot) Slot 01 Slot 02 Slot 03 Slot 04 Slot 05 MIO04 MIO04 MIO03 Slot 00 MRY01 * The first 24 Inputs use these ADDRESSES: 2010 - 2017 = 8 Inputs 2020 - 2027 = 8 Inputs 2030 - 2037 = 8 Inputs Total = 24 Inputs The next 16 Inputs use these ADDRESSES: 2070 - 2077 = 8 Inputs 2080 - 2087 = 8 Inputs Total = 16 Inputs * The first 24 Outputs use these ADDRESSES: 3010 - 3017 = 8 Outputs 3020 - 3027 = 8 Outputs 3030 - 3037 = 8 Outputs Total = 24 Outputs The next 16 Outputs use these ADDRESSES: 3070 - 3077 = 8 Outputs 3080 - 3087 = 8 Outputs Total = 16 Outputs MEW02 An MEW0 Board in this slot always uses these addresses: Input ADDRESSES are 2170 - 2177 Output ADDRESSES are 3170 - 3177. Input Addresses 2180 2187 and Output Addresses 3180 - 3187 are also reserved (see Section 5.2.2). The next 24 Inputs use these ADDRESSES: 2040 - 2047 = 8 Inputs 2050 - 2057 = 8 Inputs 2060 - 2067 = 8 Inputs Total = 24 Inputs The next 24 Outputs use these ADDRESSES: 3040 - 3047 = 8 Outputs 3050 - 3057 = 8 Outputs 3060 - 3067 = 8 Outputs Total = 24 Outputs Total dedicated and user-defined inputs: 24 + 24 + 16 = 64 Total dedicated and user-defined outputs: 24 + 24 + 16 = 64 * The first 16 to 24 inputs and outputs are used for dedicated I/O. Figure 5-3 Example of Addressing for an ArcWorld Product With One Additional Board MRC I/O Structure Manual Page 29 MOTOMAN 64 inputs and 64 outputs. If the dedicated I/O uses 16 inputs and 16 outputs, that leaves 48 inputs and 48 outputs for user-defined I/O. As shown in Tables 5-1 and 5-2 in Section 5.3, user-defined inputs and outputs are available beginning with addresses 2030 and 3030. The tables in Section 5.3 and the drawings in Appendix A show the dedicated I/O for a number of applications. Refer to the Appendix in your system's Operator's Manual for drawings specific to your application. 5.3 MRC I/O ASSIGNMENTS BY APPLICATION ➪ WARNING! The following tables are for reference only. Your MRC controller might have a modified ladder diagram with unique I/O assignments. Assigning incorrect I/O addresses can cause unexpected equipment operation, which can result in serious injury or death and in equipment damage. Input and output address assignments depend upon the number of boards installed in the MRC controller and the application. Refer to the YASNAC MRC Maintenance Manual and the MRC User Functions Manual for additional information on the MIO03 and MIO04 board I/O assignments. Refer to the electrical drawings section of your Motoman Operator's Manual for the specific MRC I/O drawings for your system. The following tables list the I/O assignments for specific applications. Be sure that you use the correct tables for your application. If in doubt, check with your authorized service representative. Also, refer to Appendix A in this manual for block diagrams of these applications using MIO04 boards. Check and test all changes at slow speed. Under the MIO04 column, the first number refers to the Phoenix connector number (CN1 or CN2). The letter and number that follow are the terminal number. For example, 2-B1 is connector CN2, terminal B1. MRC I/O Structure Manual Page 30 MOTOMAN Note: The MIO04 board has 24 inputs and 24 outputs. Table 5-1 Inputs for Arc Welding Using Two MIO04 Boards Logical Relay *I/O Type Address Slot 01 MIO04 Function (Phoenix) Logical Relay *I/O Type Address Slot 02 MIO04 Function (Phoenix) 7, 17, 18 O VDC 7, 17, 18 O VDC 19, A20 24 VDC 19, A20 24 VDC B20 B20 Frame ground 2040 I 2-B1 Frame ground IN#9 External start 2041 I 2-A1 IN#10 Master job call 2042 I 2-B2 IN#11 Alarm / error reset Remote mode sel Play mode select 2043 I 2-A2 IN#12 2044 I 2-B3 IN#13 2045 I 2-A3 IN#14 2046 I 2-B4 IN#15 2-A4 Teach mode select - 2047 I 2-A4 IN#16 I 2-B5 Cube 1 prohibit 2050 I 2-B5 IN#17 2021 I 2-A5 Cube 2 prohibit 2051 I 2-A5 IN#18 2022 I 2-B6 Work prohibit 2052 I 2-B6 IN#19 2023 I 2-A6 Work response 2053 I 2-A6 IN#20 2024 I 1-B1 - 2054 I 1-B1 IN#21 2025 I 1-A1 - 2055 I 1-A1 IN#22 2026 I 1-B2 Weaving prohibit 2056 I 1-B2 IN#23 2027 I 1-A2 Sensing prohibit 2057 I 1-A2 IN#24 2030 I 1-B3 IN#1 2060 I 1-B3 IN#25 2031 I 1-A3 IN#2 2061 I 1-A3 IN#26 2032 I 1-B4 IN#3 2062 I 1-B4 IN#27 2033 I 1-A4 IN#4 2063 I 1-A4 IN#28 2034 I 1-B5 IN#5 2064 I 1-B5 IN#29 2035 I 1-A5 IN#6 2065 I 1-A5 IN#30 2036 I 1-B6 IN#7 2066 I 1-B6 IN#31 2037 I 1-A6 IN#8 2067 I 1-A6 IN#32 2010 I 2-B1 2011 I 2-A1 2012 I 2-B2 2013 I 2-A2 2014 I 2-B3 2015 I 2-A3 2016 I 2-B4 2017 I 2020 - * I = Input and O = Output MRC I/O Structure Manual Page 31 MOTOMAN Table 5-2 Outputs for Arc Welding Using Two MIO04 Boards Logical *I/O Relay Type Address Slot 01 MIO04 Function Logical Relay (Phoenix) 2-A8, 2-B8 *I/O Type Address Slot 02 MIO04 Function (Phoenix) 3010 O 2-B9 † Common to four below Operating 3011 O 2-A9 Servo on 3041 O 2-A9 OT#10 3012 O 2-B10 Top of Master Job 3042 O 2-B10 OT#11 3013 O 2-A10 Alarm / error occur 3043 O 2-A10 OT#12 2-A11, 2-B11 † Common to four below 2-B12 Battery low 3014 O 3015 O 2-A12 3016 O 3017 O 2-A8, 2-B8 † Common to four below 3040 O 2-B9 OT#9 2-A11, 2-B11 † Common to four below 3044 O 2-B12 OT#13 Remote mode 3045 O 2-A12 OT#14 2-B13 Play mode 3046 O 2-B13 OT#15 2-A13 Teach mode 3047 O 2-A13 OT#16 2-A14, 2-B14 † Common to four below 2-B15 In Cube 1 3020 O 3021 O 2-A15 3022 O 3023 O 2-A14, 2-B14 † Common to four below 3050 O 2-B15 OT#17 In Cube 2 3051 O 2-A15 OT#18 2-B16 In Cube 8 (Home) 3052 O 2-B16 OT#19 2-A16 Sequence executing 3053 O 2-A16 OT#20 1-A8, 1-B8 3054 O 1-B9 OT#21 3024 O 1-B9 † Common to four below Gas shortage monitor 3025 O 1-A9 Wire shortage monitor 3055 O 1-A9 OT#22 3026 O 1-B10 Wire sticking monitor 3056 O 1-B10 OT#23 3027 O 1-A10 Arc shortage monitor 3057 O 1-A10 OT#24 1-A11, 1-B11 † Common to four below 1-B12 OT#1 3030 O 3031 O 1-A12 3032 O 3033 O 1-A8, 1-B8 † Common to four below 1-A11, 1-B11 † Common to four below 3060 O 1-B12 OT#25 OT#2 3061 O 1-A12 OT#26 1-B13 OT#3 3062 O 1-B13 OT#27 1-A13 OT#4 3063 O 1-A13 OT#28 1-A14, 1-B14 † Common to four below 1-B15 OT#5 3034 O 3035 O 1-A15 3036 O 1-A14, 1-B14 † Common to four below 3064 O 1-B15 OT#29 OT#6 3065 O 1-A15 OT#30 1-B16 OT#7 3066 O 1-B16 OT#31 3037 O 1-A16 * I = Input and O = Output OT#8 3067 O 1-A16 OT#32 MRC I/O Structure Manual Page 32 MOTOMAN † See Section 3.2.1 and Figures 3-3 and 3-4. MRC I/O Structure Manual Page 33 MOTOMAN Note: The MIO04 board has 24 inputs and 24 outputs. Table 5-3 Inputs for General or Universal Applications Using Two MIO04 Boards Logical Relay *I/O Type Address Slot 01 MIO04 Function (Phoenix) Logical Relay *I/O Type Address Slot 02 MIO04 Function (Phoenix) 7, 17, 18 O VDC 7, 17, 18 O VDC 19, A20 24 VDC 19, A20 24 VDC B20 Frame ground External start 2010 I 2-B1 2011 I 2-A1 2012 I 2-B2 2013 I 2-A2 2014 I 2-B3 2015 I 2-A3 2016 I 2-B4 2017 I 2020 B20 Frame ground 2040 I 2-B1 IN#9 2041 I 2-A1 IN#10 Master job call 2042 I 2-B2 IN#11 Alarm / error reset Remote mode sel Play mode select 2043 I 2-A2 IN#12 2044 I 2-B3 IN#13 2045 I 2-A3 IN#14 2046 I 2-B4 IN#15 2-A4 Teach mode select - 2047 I 2-A4 IN#16 I 2-B5 Cube 1 prohibit 2050 I 2-B5 IN#17 2021 I 2-A5 Cube 2 prohibit 2051 I 2-A5 IN#18 2022 I 2-B6 Work prohibit 2052 I 2-B6 IN#19 2023 I 2-A6 Work response 2053 I 2-A6 IN#20 2024 I 1-B1 Cube 3 prohibit 2054 I 1-B1 IN#21 2025 I 1-A1 Cube 4 prohibit 2055 I 1-A1 IN#22 2026 I 1-B2 - 2056 I 1-B2 IN#23 2027 I 1-A2 - 2057 I 1-A2 IN#24 2030 I 1-B3 IN#1 2060 I 1-B3 IN#25 2031 I 1-A3 IN#2 2061 I 1-A3 IN#26 2032 I 1-B4 IN#3 2062 I 1-B4 IN#27 2033 I 1-A4 IN#4 2063 I 1-A4 IN#28 2034 I 1-B5 IN#5 2064 I 1-B5 IN#29 2035 I 1-A5 IN#6 2065 I 1-A5 IN#30 2036 I 1-B6 IN#7 2066 I 1-B6 IN#31 2037 I 1-A6 IN#8 2067 I 1-A6 IN#32 - * I = Input and O = Output MRC I/O Structure Manual Page 34 MOTOMAN Table 5-4 Outputs for General or Universal Applications Using Two MIO04 Boards Logical *I/O Relay Type Address Slot 01 MIO04 Function Logical Relay (Phoenix) 2-A8, 2-B8 *I/O Type Address Slot 02 MIO04 Function (Phoenix) 3010 O 2-B9 † Common to four below Operating 3011 O 2-A9 Servo on 3041 O 2-A9 OT#10 3012 O 2-B10 Top of Master Job 3042 O 2-B10 OT#11 3013 O 2-A10 Alarm / error occur 3043 O 2-A10 OT#12 2-A11, 2-B11 † Common to four below 2-B12 Battery low 3014 O 3015 O 2-A12 3016 O 3017 O 2-A8, 2-B8 † Common to four below 3040 O 2-B9 OT#9 2-A11, 2-B11 † Common to four below 3044 O 2-B12 OT#13 Remote mode 3045 O 2-A12 OT#14 2-B13 Play mode 3046 O 2-B13 OT#15 2-A13 Teach mode 3047 O 2-A13 OT#16 2-A14, 2-B14 † Common to four below 2-B15 In Cube 1 3020 O 3021 O 2-A15 3022 O 3023 O 2-A14, 2-B14 † Common to four below 3050 O 2-B15 OT#17 In Cube 2 3051 O 2-A15 OT#18 2-B16 In Cube 8 (Home) 3052 O 2-B16 OT#19 2-A16 Sequence executing 3053 O 2-A16 OT#20 1-A8, 1-B8 3024 O 1-B9 † Common to four below In Cube 3 3025 O 1-A9 In Cube 4 3055 O 1-A9 OT#22 3026 O 1-B10 Work instruction 3056 O 1-B10 OT#23 3027 O 1-A10 3057 O 1-A10 OT#24 - 1-A11, 1-B11 † Common to four below 1-B12 OT#1 3030 O 3031 O 1-A12 3032 O 3033 O 1-A8, 1-B8 † Common to four below 3054 O 1-B9 OT#21 1-A11, 1-B11 † Common to four below 3060 O 1-B12 OT#25 OT#2 3061 O 1-A12 OT#26 1-B13 OT#3 3062 O 1-B13 OT#27 1-A13 OT#4 3063 O 1-A13 OT#28 1-A14, 1-B14 † Common to four below 1-B15 OT#5 3034 O 3035 O 1-A15 3036 O 1-A14, 1-B14 † Common to four below 3064 O 1-B15 OT#29 OT#6 3065 O 1-A15 OT#30 1-B16 OT#7 3066 O 1-B16 OT#31 3037 O 1-A16 * I = Input and O = Output OT#8 3067 O 1-A16 OT#32 MRC I/O Structure Manual Page 35 MOTOMAN † See Section 3.2.1 and Figures 3-3 and 3-4. MRC I/O Structure Manual Page 36 MOTOMAN Note: The MIO04 board has 24 inputs and 24 outputs. Table 5-5 Inputs for Spot Welding Using Two MIO04 Boards Logical Relay *I/O Type Address Slot 01 MIO04 Function (Phoenix) Logical Relay *I/O Type Address Slot 02 MIO04 Function (Phoenix) 7, 17, 18 O VDC 7, 17, 18 O VDC 19, A20 24 VDC 19, A20 24 VDC B20 Frame ground B20 Frame ground 2010 I 2-B1 External start 2040 I 2-B1 IN#1 2011 I 2-A1 - 2041 I 2-A1 IN#2 2012 I 2-B2 Master job call 2042 I 2-B2 IN#3 2013 I 2-A2 Alarm / error reset 2043 I 2-A2 IN#4 2014 I 2-B3 Remote mode sel 2044 I 2-B3 IN#5 2015 I 2-A3 Play mode select 2045 I 2-A3 IN#6 2016 I 2-B4 Teach mode select 2046 I 2-B4 IN#7 2017 I 2-A4 2047 I 2-A4 IN#8 2020 I 2-B5 Cube 1 prohibit 2050 I 2-B5 IN#9 2021 I 2-A5 Cube 2 prohibit 2051 I 2-A5 IN#10 2022 I 2-B6 Work prohibit 2052 I 2-B6 IN#11 2023 I 2-A6 Work response 2053 I 2-A6 IN#12 2024 I 1-B1 Cube 3 prohibit 2054 I 1-B1 IN#13 2025 I 1-A1 Cube 4 prohibit 2055 I 1-A1 IN#14 2026 I 1-B2 2056 I 1-B2 IN#15 2027 I 1-A2 2057 I 1-A2 IN#16 2030 I 1-B3 2060 I 1-B3 IN#17 2031 I 1-A3 - 2061 I 1-A3 IN#18 2032 I 1-B4 - 2062 I 1-B4 IN#19 2033 I 1-A4 Wire sticking error 2063 I 1-A4 IN#20 2034 I 1-B5 Welding error 2064 I 1-B5 IN#21 2035 I 1-A5 Welding completed 2065 I 1-A5 IN#22 2036 I 1-B6 2066 I 1-B6 IN#23 2037 I 1-A6 Gun short open completed Gun full open completed 2067 I 1-A6 IN#24 - Tip replacement completed - * I = Input and O = Output MRC I/O Structure Manual Page 37 MOTOMAN Table 5-6 Outputs for Spot Welding Using Two MIO04 Boards Logical *I/O Relay Type Address Slot 01 MIO04 Function Logical Relay (Phoenix) 2-A8, 2-B8 *I/O Type Address Slot 02 MIO04 Function (Phoenix) 3010 O 2-B9 † Common to four below Operating 3011 O 2-A9 Servo on 3041 O 2-A9 OT#2 3012 O 2-B10 Top of Master Job 3042 O 2-B10 OT#3 3013 O 2-A10 Alarm / error occur 3043 O 2-A10 OT#4 2-A11, 2-B11 † Common to four below 2-B12 Battery low 3014 O 3015 O 2-A12 3016 O 3017 O 2-A8, 2-B8 † Common to four below 3040 O 2-B9 OT#1 2-A11, 2-B11 † Common to four below 3044 O 2-B12 OT#5 Remote mode 3045 O 2-A12 OT#6 2-B13 Play mode 3046 O 2-B13 OT#7 2-A13 Teach mode 3047 O 2-A13 OT#8 2-A14, 2-B14 † Common to four below 2-B15 In Cube 1 3020 O 3021 O 2-A15 3022 O 3023 O 2-A14, 2-B14 † Common to four below 3050 O 2-B15 OT#9 In Cube 2 3051 O 2-A15 OT#10 2-B16 In Cube 8 (Home) 3052 O 2-B16 OT#11 2-A16 Sequence executing 3053 O 2-A16 OT#12 1-A8, 1-B8 3024 O 1-B9 † Common to four below In Cube 3 3025 O 1-A9 In Cube 4 3055 O 1-A9 OT#14 3026 O 1-B10 Welding error monitor 3056 O 1-B10 OT#15 3027 O 1-A10 Tip replacement request 3057 O 1-A10 OT#16 1-A11, 1-B11 † Common to four below 1-B12 Welding timer d0 3030 O 3031 O 1-A12 3032 O 3033 O 1-A8, 1-B8 † Common to four below 3054 O 1-B9 OT#13 1-A11, 1-B11 † Common to four below 3060 O 1-B12 OT#17 Welding timer d1 3061 O 1-A12 OT#18 1-B13 Welding timer d2 3062 O 1-B13 OT#19 1-A13 Welding timer d3 3063 O 1-A13 OT#20 1-A14, 1-B14 † Common to four below 1-B15 - 3034 O 3035 O 1-A15 3036 O 1-B16 3037 O 1-A16 * I = Input and O = Output MRC I/O Structure Manual 1-A14, 1-B14 † Common to four below 3064 O 1-B15 OT#21 Welding on 3065 O 1-A15 OT#22 Gun pressure 3066 O 1-B16 OT#23 Gun full open 3067 O 1-A16 OT#24 Page 38 MOTOMAN † See Section 3.2.1 and Figures 3-3 and 3-4. MRC I/O Structure Manual Page 39 MOTOMAN Note: The MIO04 board has 24 inputs and 24 outputs. Table 5-7 Inputs for Material Handling Using Two MIO04 Boards Logical Relay *I/O Type Address Slot 01 MIO04 Function (Phoenix) Logical Relay *I/O Type Address Slot 02 MIO04 Function (Phoenix) 7, 17, 18 O VDC 7, 17, 18 O VDC 19, A20 24 VDC 19, A20 24 VDC B20 Frame ground B20 Frame ground 2010 I 2-B1 External start 2040 I 2-B1 IN#1 2011 I 2-A1 - 2041 I 2-A1 IN#2 2012 I 2-B2 Master job call 2042 I 2-B2 IN#3 2013 I 2-A2 Alarm / error reset 2043 I 2-A2 IN#4 2014 I 2-B3 Remote mode sel 2044 I 2-B3 IN#5 2015 I 2-A3 Play mode select 2045 I 2-A3 IN#6 2016 I 2-B4 Teach mode select 2046 I 2-B4 IN#7 2017 I 2-A4 2047 I 2-A4 IN#8 2020 I 2-B5 Cube 1 prohibit 2050 I 2-B5 IN#9 2021 I 2-A5 Cube 2 prohibit 2051 I 2-A5 IN#10 2022 I 2-B6 Work prohibit 2052 I 2-B6 IN#11 2023 I 2-A6 - 2053 I 2-A6 IN#12 2024 I 1-B1 - 2054 I 1-B1 IN#13 2025 I 1-A1 - 2055 I 1-A1 IN#14 2026 I 1-B2 Sensor input 7 2056 I 1-B2 IN#15 2027 I 1-A2 Sensor input 8 2057 I 1-A2 IN#16 2030 I 1-B3 Sensor input 1 2060 I 1-B3 IN#17 2031 I 1-A3 Sensor input 2 2061 I 1-A3 IN#18 2032 I 1-B4 Sensor input 3 2062 I 1-B4 IN#19 2033 I 1-A4 Sensor input 4 2063 I 1-A4 IN#20 2034 I 1-B5 Sensor input 5 2064 I 1-B5 IN#21 2035 I 1-A5 Sensor input 6 2065 I 1-A5 IN#22 2036 I 1-B6 Shock sensor (NC) 2066 I 1-B6 IN#23 2037 I 1-A6 Air pressure drop 2067 I 1-A6 IN#24 - * I = Input and O = Output MRC I/O Structure Manual Page 40 MOTOMAN Table 5-8 Outputs for Material Handling Using Two MIO04 Boards Logical *I/O Relay Type Address Slot 01 MIO04 Function Logical Relay (Phoenix) 2-A8, 2-B8 *I/O Type Address Slot 02 MIO04 Function (Phoenix) 3010 O 2-B9 † Common to four below Operating 3011 O 2-A9 Servo on 3041 O 2-A9 OT#2 3012 O 2-B10 Top of Master Job 3042 O 2-B10 OT#3 3013 O 2-A10 Alarm / error occur 3043 O 2-A10 OT#4 2-A11, 2-B11 † Common to four below 2-B12 Battery low 3014 O 3015 O 2-A12 3016 O 3017 O 2-A8, 2-B8 † Common to four below 3040 O 2-B9 OT#1 2-A11, 2-B11 † Common to four below 3044 O 2-B12 OT#5 Remote mode 3045 O 2-A12 OT#6 2-B13 Play mode 3046 O 2-B13 OT#7 2-A13 Teach mode 3047 O 2-A13 OT#8 2-A14, 2-B14 † Common to four below 2-B15 In Cube 1 3020 O 3021 O 2-A15 3022 O 3023 O 2-A14, 2-B14 † Common to four below 3050 O 2-B15 OT#9 In Cube 2 3051 O 2-A15 OT#10 2-B16 In Cube 8 (Home) 3052 O 2-B16 OT#11 2-A16 Sequence executing 3053 O 2-A16 OT#12 1-A8, 1-B8 3024 O 1-B9 3025 O 1-A9 3026 O 1-B10 3027 O 1-A10 † Common to four below - O 3031 O 1-A12 3032 O 3033 O † Common to four below 3054 O 1-B9 OT#13 3055 O 1-A9 OT#14 Tool Valve 4-1 3056 O 1-B10 OT#15 Tool Valve 4-2 3057 O 1-A10 OT#16 - 1-A11, 1-B11 † Common to four below 1-B12 Tool Valve 1-1 3030 1-A8, 1-B8 1-A11, 1-B11 † Common to four below 3060 O 1-B12 OT#17 Tool Valve 1-2 3061 O 1-A12 OT#18 1-B13 Tool Valve 2-1 3062 O 1-B13 OT#19 1-A13 Tool Valve 2-2 3063 O 1-A13 OT#20 1-A14, 1-B14 † Common to four below 1-B15 Tool Valve 3-1 3034 O 3035 O 1-A15 3036 O 1-B16 3037 O 1-A16 * I = Input and O = Output MRC I/O Structure Manual 1-A14, 1-B14 † Common to four below 3064 O 1-B15 OT#21 3065 O 1-A15 OT#22 - 3066 O 1-B16 OT#23 - 3067 O 1-A16 OT#24 Tool Valve 3-2 Page 41 MOTOMAN † See Section 3.2.1 and Figures 3-3 and 3-4. MRC I/O Structure Manual Page 42 MOTOMAN APPENDIX A - MRC I/O BLOCK DIAGRAMS Appendix A contains MRC I/O block diagrams showing addresses and connections for standard arc welding, universal (or general), spot welding, and handling applications. Drawing Number Title Sheet Number M4AS1C2 Arc Welding App, Slot 1 1 M4AS1C1 Arc Welding App, Slot 1 1 M4AS2C2 Arc Welding App, Slot 2 1 M4AS2C1 Arc Welding App, Slot 2 1 M4US1C2 Universal App, Slot 1 1 M4US1C1 Universal App, Slot 1 1 M4US2C2 Universal App, Slot 2 1 M4US2C1 Universal App, Slot 2 1 M4SWS1C2 Spot Welding App, Slot 1 1 M4SWS1C1 Spot Welding App, Slot 1 1 M4SWS2C2 Spot Welding App, Slot 2 1 M4SWS2C1 Spot Welding App, Slot 2 1 M4HS1C2 Handling App, Slot 1 1 M4HS1C1 Handling App, Slot 1 1 M4HS2C2 Handling App, Slot 2 1 M4HS2C1 Handling App, Slot 2 1 MRC I/O Structure Manual Appendix A MOTOMAN INDEX C Connection Diagram Using the Shock Sensor for E-Stop Condition, 11 Customer Service Information, 4 D Dedicated I/O, 5 E Example of Addressing for an ArcWorld Product With One Additional Board, 23 Example of Addressing With All I/O Slots Filled, 22 External Emergency Stop Input, 6 External Emergency Stop Input Connection, 6 External Hold Input, 8 External Hold Input Connection, 8 H How to Place Jumpers on Pins for Shock Sensor Input, 12 I I/O Rack Location, 3 Input Conditions, 13 Input Connection on MIO01 Board, 17 Input Connection on MIO02 Board, 18 Input Connection on MIO04 Board, 14 Input Connections, 13 Input Connections on MIO03 Board in Sinking and Sourcing Configurations, 14 Inputs for Arc Welding Using Two MIO04 Boards, 25 Inputs for General or Universal Applications Using Two MIO04 Boards, 27 Inputs for Material Handling Using Two MIO04 Boards, 31 Inputs for Spot Welding Using Two MIO04 Boards, 29 Introduction, 1 L MRC I/O Structure Manual Index MOTOMAN Location of MRC I/O Boards, 3 Logical Relay Addresses, 20 MRC I/O Structure Manual Index MOTOMAN M MARIO and MIF05 Boards, 2 MEW01 and MEWO2 Boards, 2 MIO01 and MIO02 Boards, 1 MIO01 and MIO02 Boards, 17 MIO03 AND MIO04 Boards, 13 MIO03 Board, 2 MIO03 Output Relays, 15 MIO04 Board, 2 MIO04 or MIO03 Board Output With DC Relay Coil, 16 MIO04 Output Relays, 15 MRC I/O ALlocation And Configuration, 20 MRC I/O Assignments by Application, 24 MRC I/O Block Diagrams, A-1 MRC I/O by Motoman Application, 2 MRY01 Board, 1 O Output Connection on MIO01 Board, 18 Output Connection on MIO02 Board, 19 Output Connections, 16 Output Relay Description, 15 Outputs for Arc Welding Using Two MIO04 Boards, 26 Outputs for General or Universal Applications Using Two MIO04 Boards, 28 Outputs for Material Handling Using Two MIO04 Boards, 32 Outputs for Spot Welding Using Two MIO04 Boards, 30 P Power Supply, 4 R Reference to Other Documentation, 4 Relay Outputs, 15 Remote Mode Select Input, 9 Remote Mode Select Input Connection on an MIO04 Board, 9 Rules and Limitations, 21 MRC I/O Structure Manual Index MOTOMAN S Servo On Input, 7 Servo On Input Connection, 7 Servo On Output, 10 Servo On Output Connection on an MIO04 Board, 10 Setting Up Input and Output Addresses, 20 Shock Sensor Input, 11 T Transistor Inputs, 13, 17 Transistor Outputs, 18 MRC I/O Structure Manual Index MOTOMAN







© Copyright 2026