
15 elimination In previous years, we have solved ½
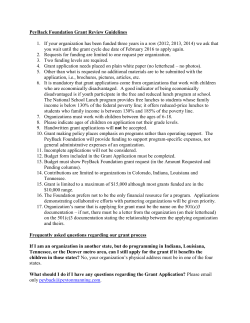
LINEAR ALGEBRA (Chapter 1) B 15 GAUSSIAN ELIMINATION In previous years, we have solved 2 £ 2 systems of linear equations by elimination. ½ 2x + y = ¡1 Consider the system x ¡ 3y = 17. From using the method of elimination, we know we can: ² interchange the equations, called swapping ½ ½ 2x + y = ¡1 x ¡ 3y = 17 has the same solution as x ¡ 3y = 17 2x + y = ¡1 ² replace an equation by any non-zero multiple of itself, called scaling ½ ½ 2x + y = ¡1 ¡6x ¡ 3y = 3 has the same solution as x ¡ 3y = 17 x ¡ 3y = 17 fmultiplying by ¡3g SA M PL E ² replace an equation by a multiple of itself plus a multiple of another equation, called pivoting. If we replace the second equation by “twice the second equation, minus the first equation”, we have 2x ¡ 6y = 34 ¡(2x + y = ¡1) ½ ) ¡7y = 35 ½ 2x + y = ¡1 x ¡ 3y = 17 has the same solution as 2x + y = ¡1 ¡7y = 35 . The principles of swapping, scaling, and pivoting are applied to augmented matrices as elementary row operations. We can hence: ² interchange rows ² replace any row by a non-zero multiple of itself ² replace any row by itself plus a multiple of another row. ½ For example, the system 2x + y = ¡1 x ¡ 3y = 17 µ has AM Elementary row operations do not change the solution of the system. ¶ 2 1 ¡1 . 1 ¡3 17 ² If we interchanged rows 1 and 2, we would write: µ ¶ µ ¶ 2 1 ¡1 1 ¡3 17 R1 $ R2 » 1 ¡3 17 2 1 ¡1 indicates rows 1 and 2 have been interchanged means “which has the same solution as” ² If we multiplied row 1 by ¡3, we would write: µ ¶ µ ¶ 2 1 ¡1 ¡6 ¡3 3 ¡3R1 ! R1 » 1 ¡3 17 1 ¡3 17 cyan magenta yellow 95 100 50 75 25 0 5 95 100 50 75 25 0 5 95 100 50 75 25 0 5 95 100 50 75 25 0 5 indicates row 1 has been replaced by “¡3 £ row 1” black Y:\HAESE\IB_HL_OPT-FM\IB_HL_OPT-FM_01\015IB_HL_OPT-FM_01.cdr Tuesday, 1 July 2014 10:35:22 AM EMMA IB HL OPT Further Mathematics 16 LINEAR ALGEBRA (Chapter 1) ² If we replaced row 2 by “twice row 2 minus row 1”, we would write: µ ¶ µ ¶ 2 1 ¡1 2 1 ¡1 » 2R2 ¡ R1 ! R2 1 ¡3 17 0 ¡7 35 indicates row 2 has been replaced by “twice row 2 minus row 1” In the process of row reduction, we use elementary row operations to eliminate variables from selected rows of an augmented matrix. This allows us to systematically solve the corresponding system of linear equations. SOLVING 2 £ 2 SYSTEMS OF LINEAR EQUATIONS To solve a 2 £ 2 system of linear equations by row reduction, we aim to obtain a 0 in the bottom left corner of the augmented matrix. This is equivalent to eliminating x1 from the corresponding equation. ½ Use elementary row operations to solve: 2x + 3y = 4 5x + 4y = 17 µ 2 3 4 5 4 17 ¶ SA M PL In augmented matrix form, the system is E Example 2 µ » 2 3 4 0 ¡7 14 ¶ Using row 2, ¡7y = 14 ) y = ¡2 2R2 ¡ 5R1 ! R2 Check your solution by substitution into the original equations. Substituting into row 1, 2x + 3(¡2) = 4 ) 2x = 10 ) x=5 ) the solution is x = 5, y = ¡2. cyan magenta yellow 95 100 50 75 25 0 5 95 100 50 75 25 0 5 95 100 50 75 infinitely many points of intersection infinitely many simultaneous solutions For example: ½ 2x + 3y = 1 4x + 6y = 2 25 no points of intersection no simultaneous solutions For example: ½ 2x + 3y = 1 2x + 3y = 7 0 one point of intersection a unique simultaneous solution For example: ½ 2x + 3y = 1 x ¡ 2y = 8 5 Coincident lines 95 Parallel lines 100 50 Intersecting lines 75 25 0 5 In previous courses, you should have seen that ax + by = c where a, b, c are constants, is a line in the Cartesian plane. Given two such lines, there are three possible cases which may occur: black Y:\HAESE\IB_HL_OPT-FM\IB_HL_OPT-FM_01\016IB_HL_OPT-FM_01.cdr Friday, 13 June 2014 4:30:05 PM BRIAN IB HL OPT Further Mathematics LINEAR ALGEBRA (Chapter 1) 17 EXERCISE 1B.1 ½ 1 Consider the system of linear equations x ¡ 3y = 2 2x + y = ¡3 a Write the system as an augmented matrix. b Replace the second row with “the second row minus twice the first row”. c Hence solve the system. E 2 By inspection, decide whether the pair of lines is intersecting, parallel, or coincident, and state the number of solutions to the system. ½ ½ x + 2y = 1 2x ¡ y = ¡1 a b 3x + 6y = 3 x + 4y = 13 ½ ½ x ¡ 5y = 8 x+y = 4 c d 2x = 10y + 14 x + y = a, a 2 R 3 Use elementary row operations to solve: ½ x ¡ 3y = ¡8 a 4x + 5y = 19 ½ 2x + 3y = ¡8 c x + 4y = ¡9 x + 7y = ¡17 2x ¡ y = 11 SA M PL ½ ½ 4 Consider the system b ½ d 3x ¡ y = 9 4x + 3y = ¡1 x + 3y = 4 2x + 6y = 8. a Explain why there are infinitely many solutions. b Try to solve the system using elementary row operations. Explain what happens. c Let y = t, t 2 R . Solve the system in terms of t. d Let x = s, s 2 R . Solve the system in terms of s. e Explain why your solutions in c and d are equivalent. ½ 5 Consider the system x ¡ 5y = 8 2x ¡ 10y = a where a 2 R . a Write the system as an augmented matrix, and perform an elementary row operation to make the bottom left corner element 0. b Explain what the second row means for the cases where a 6= 16. How many solutions does the system have in this case? c Find all solutions for the case where a = 16. cyan magenta yellow 95 100 50 75 for all a, b 2 R . 25 0 5 95 x + 3y = 4 2x + ay = b 100 50 25 0 5 95 100 50 75 25 0 5 95 100 50 75 25 0 5 6 Discuss the solutions to 75 ½ black Y:\HAESE\IB_HL_OPT-FM\IB_HL_OPT-FM_01\017IB_HL_OPT-FM_01.cdr Friday, 13 June 2014 4:30:29 PM BRIAN IB HL OPT Further Mathematics 18 LINEAR ALGEBRA (Chapter 1) SOLVING 3 £ 3 SYSTEMS OF LINEAR EQUATIONS 8 < a11 x1 + a12 x2 + a13 x3 = d1 a21 x1 + a22 x2 + a23 x3 = d2 The general 3 £ 3 systems of linear equations can be written as : a31 x1 + a32 x2 + a33 x3 = d3 0 1 a11 a12 a13 d1 the augmented matrix @ a21 a22 a23 d2 A. a31 a32 a33 d3 0 1 a b c d We can use elementary row operations to reduce the matrix to the form @ 0 e f g A in which 0 0 h i there is a triangle of zeros in the bottom left corner. We call this row echelon form. From the row echelon form, we can see that: E ² If h 6= 0, the third row means hx3 = i. We can therefore solve for x3 , and hence for x2 and x1 using rows 2 and 1 respectively. The system has a unique solution. Example 3 SA M PL 8 < x + 3y ¡ z = 15 2x + y + z = 7 : x ¡ y ¡ 2z = 0 Solve using elementary row operations: 0 1 @2 The system has AM 1 0 1 » @0 0 0 1 » @0 0 1 3 ¡1 15 1 1 7 A ¡1 ¡2 0 1 3 ¡1 15 ¡5 3 ¡23 A ¡4 ¡1 ¡15 1 3 ¡1 15 ¡5 3 ¡23 A 0 ¡17 17 R2 ¡ 2R1 ! R2 R3 ¡ R1 ! R3 5R3 ¡ 4R2 ! R3 Using row 3, ¡17z = 17 ) z = ¡1 Substituting into row 2, ¡5y + 3(¡1) = ¡23 ) ¡5y = ¡20 ) y=4 Substituting into row 1, x + 3(4) ¡ (¡1) = 15 ) x=2 cyan magenta yellow 95 100 50 75 25 0 5 95 100 50 75 25 0 5 95 100 50 75 25 0 5 95 100 50 75 25 0 5 ) the solution is x = 2, y = 4, z = ¡1. black Y:\HAESE\IB_HL_OPT-FM\IB_HL_OPT-FM_01\018IB_HL_OPT-FM_01.cdr Friday, 13 June 2014 4:30:43 PM BRIAN IB HL OPT Further Mathematics LINEAR ALGEBRA (Chapter 1) 19 ² If h = 0 and i 6= 0, the third row means 0x1 + 0x2 + 0x3 = i where i 6= 0. In this case there is no solution and the system is inconsistent. Example 4 8 < x + 2y + z = 3 2x ¡ y + z = 8 : 3x ¡ 4y + z = 18 Solve using elementary row operations: 1 @2 The system has AM 3 0 1 » @0 0 0 1 » @0 0 1 2 1 3 ¡1 1 8 A ¡4 1 18 1 2 1 3 ¡5 ¡1 2 A ¡10 ¡2 9 1 2 1 3 ¡5 ¡1 2 A 0 0 5 R2 ¡ 2R1 ! R2 R3 ¡ 3R1 ! R3 E 0 R3 ¡ 2R2 ! R3 SA M PL Row 3 means that 0x + 0y + 0z = 5, which is absurd. ) there is no solution, and the system is inconsistent. ² If h = 0 and i = 0, the last row is all zeros. In this case the system has infinitely many solutions. We let x3 = t where t 2 R and write x1 and x2 in terms of t. In this case the solution is a parametric representation with parameter t. We call x1 and x2 basic variables and x3 a free variable. Example 5 8 < 2x ¡ y + z = 5 x+y¡z =2 : 3x ¡ 3y + 3z = 8 Solve using elementary row operations: 0 2 @1 The system has AM 3 0 2 » @0 0 0 2 » @0 0 1 ¡1 1 5 1 ¡1 2 A ¡3 3 8 1 ¡1 1 5 3 ¡3 ¡1 A ¡3 3 1 1 ¡1 1 5 3 ¡3 ¡1 A 0 0 0 2R2 ¡ R1 ! R2 2R3 ¡ 3R1 ! R3 R2 + R3 ! R3 Row 3 indicates there are infinitely many solutions. If we let z = t, then using row 2, 3y ¡ 3t = ¡1 ) 3y = 3t ¡ 1 cyan magenta yellow 95 1 3 100 50 75 25 0 5 95 100 50 75 25 0 5 95 100 50 75 25 0 5 95 100 50 75 25 0 5 ) y =t¡ black Y:\HAESE\IB_HL_OPT-FM\IB_HL_OPT-FM_01\019IB_HL_OPT-FM_01.cdr Friday, 13 June 2014 4:31:12 PM BRIAN IB HL OPT Further Mathematics 20 LINEAR ALGEBRA (Chapter 1) Substituting into row 1, 2x ¡ (t ¡ 13 ) + t = 5 ) 2x = ) x= 14 3 7 3 ) the solutions have the form x = 73 , y = t ¡ 13 , z = t, t 2 R . EXERCISE 1B.2 by row reduction to echelon form: 8 8 < 2x ¡ y + 3z = 17 < 2x + 3y + 4z 2x ¡ 2y ¡ 5z = 4 5x + 6y + 7z c : : 3x + 2y + 2z = 10 8x + 9y + 10z 8 8 < x + 2y ¡ z = 4 < 2x + 4y + z 3x + 2y + z = 7 3x ¡ 5y ¡ 3z f : : 5x + 2y + 3z = 11 5x + 13y + 7z Example 6 =1 = 19 =1 where a 2 R . SA M PL 8 < x ¡ 2y ¡ z = ¡1 2x + y + 3z = 13 Consider the system : x + 8y + 9z = a =1 =2 =4 E 1 Solve each system of linear equations 8 < x + 4y + 11z = 7 x + 6y + 17z = 9 a b : x + 4y + 8z = 4 8 < x ¡ 2y + 5z = 1 2x ¡ y + 8z = 2 d e : ¡3x ¡ 11z = ¡3 a Row reduce the system to echelon form. b For what values of a does the system have no solutions? c Under what conditions does the system have infinitely many solutions? Find the solutions in this case. 0 1 1 ¡2 ¡1 ¡1 @2 1 3 13 A a The system has AM 1 8 9 a 0 1 1 ¡2 ¡1 ¡1 5 15 A » @0 5 0 10 10 a + 1 0 1 1 ¡2 ¡1 ¡1 5 15 A » @0 5 0 0 0 a ¡ 29 R2 ¡ 2R1 ! R2 R3 ¡ R1 ! R3 R3 ¡ 2R2 ! R3 b Using row 3, the system has no solutions if a 6= 29. c The system has infinitely many solutions if the last row is all zeros. This occurs when a = 29. In this case we let z = t. ) using row 2, 5y + 5t = 15 ) 5y = 15 ¡ 5t ) y =3¡t cyan magenta yellow 95 100 50 75 25 0 5 95 100 50 75 25 0 5 95 100 50 75 25 0 5 95 100 50 75 25 0 5 Substituting into row 1, x ¡ 2(3 ¡ t) ¡ t = ¡1 ) x ¡ 6 + t = ¡1 ) x=5¡t ) the solutions have the form x = 5 ¡ t, y = 3 ¡ t, z = t, t 2 R . black Y:\HAESE\IB_HL_OPT-FM\IB_HL_OPT-FM_01\020IB_HL_OPT-FM_01.cdr Monday, 23 June 2014 12:01:12 PM BRIAN IB HL OPT Further Mathematics LINEAR ALGEBRA (Chapter 1) 8 < x + 2y + z = 3 2x ¡ y + 4z = 1 2 Consider the system : x + 7y ¡ z = k 21 where k 2 R . a Row reduce the system to echelon form. b For what values of k does the system have no solutions? c Under what condition does the system have infinitely many solutions? Find the solutions in this case. d Explain why the system never has a unique solution. 8 < x + 2y ¡ 2z = 5 x ¡ y + 3z = ¡1 3 Consider the system where k 2 R . : x ¡ 7y + kz = ¡k SA M PL E a Row reduce the system to echelon form. b Show that for one value of k, the system has infinitely many solutions. Find the solutions in this case. c Show that there is a unique solution for all other values of k. Find this solution in terms of k. 8 < x + 3y + 3z = a ¡ 1 2x ¡ y + z = 7 4 Consider the system where a 2 R . : 3x ¡ 5y + az = 16 a Row reduce the system to echelon form. b Show that for one value of a, the system has infinitely many solutions. Find the solutions in this case. c Show that there is a unique solution for all other values of a. Find the solution in terms of a. REDUCED ROW ECHELON FORM We have seen how elementary row operations can be used to reduce augmented matrices to echelon form. We can use further row operations to convert the augmented matrix into a form from which the solution can be read by inspection. An augmented matrix is said to be in reduced row echelon form if: ² ² ² ² any row containing all zeros is placed at the bottom for every other row, the first or leading non-zero element is 1 the rows which contain non-zero elements are ordered according to the positions of the leading 1s every column containing a leading 1, has zeros elsewhere. For example: cyan magenta yellow 95 100 50 75 25 0 5 95 100 50 75 25 0 5 95 100 50 75 25 0 5 95 100 50 75 25 0 5 ² these matrices are in row echelon form: 0 1 µ ¶ µ ¶ 0 1 2 6 3 1 2 4 1 ¡1 4 5 , , @0 0 0 1 4A 0 1 3 0 1 0 6 0 0 0 0 0 black Y:\HAESE\IB_HL_OPT-FM\IB_HL_OPT-FM_01\021IB_HL_OPT-FM_01.cdr Friday, 13 June 2014 4:35:20 PM BRIAN The pivots are shaded. IB HL OPT Further Mathematics 22 LINEAR ALGEBRA (Chapter 1) ² these 0 1 @0 0 matrices are in reduced row echelon form: 1 0 1 01 0 0 3 1 0 3 0 4 B0 1 0 ¡4 A, @ 0 0 0 1 5 A, @ 0 0 1 5 0 0 0 0 0 0 3 0 0 0 1 0 2 ¡1 0 1 4 C 1 ¡1 3 A 0 0 0 0 1 0 0 The leading 1s in each row are the pivots for the row operations, and the variables corresponding to the columns which they are in are basic variables. The remaining variables are free variables, and must be allocated parameters. The systematic procedure by which a system of linear equations is written as an augmented matrix in reduced row echelon form and hence solved, is called Gaussian Elimination. We generally use a calculator for this task, since it can take a long time by hand. Click on the icon to obtain instructions for your graphics calculator. You should be able to enter an augmented matrix, then reduce it to row echelon form or reduced row echelon form. E Example 7 system of linear equations whose augmented matrix in reduced row echelon form is: 1 0 1 0 0 ¡3 1 3 0 2 ¡1 1 0 4 A b @0 0 1 1 4 A 0 1 7 0 0 0 0 0 SA M PL Solve the 0 1 a @0 0 GRAPHICS CALCUL ATOR INSTRUCTIONS a By inspection, the system has the unique solution x1 = ¡3, x2 = 4, x3 = 7. b The basic variables are x1 and x3 , and the free variables are x2 and x4 . Let x2 = r and x4 = s. Using row 2, x3 + s = 4 ) x3 = 4 ¡ s Using row 1, x1 + 3r + 2s = ¡1 ) x1 = ¡1 ¡ 3r ¡ 2s So, the solutions have the form x1 = ¡1 ¡ 3r ¡ 2s, x2 = r, x3 = 4 ¡ s, x4 = s, where r, s 2 R . cyan magenta yellow 95 100 50 75 25 0 5 95 4 1 1 0 1 0 0C 0A 0 in reduced row echelon form is: 1 0 1 5 0 0 1 0 0 2 5 0 1 0A c @0 1 0 2 4A 0 0 1 0 0 1 1 6 100 50 75 25 0 5 95 100 50 75 25 0 5 system whose augmented matrix 1 0 0 0 2 1 1 0 ¡9 A b @0 0 1 3 0 95 2 Solve the 0 1 a @0 0 100 the following augmented matrices are in reduced row echelon form? 0 1 1 3 0 µ ¶ 0 0 1 0 2 3 0 0 1 B 0 0A b c @ 0 1 2 4 0 0 0 1 0 0 0 0 50 1 Which of 0 1 @ 0 a 0 75 25 0 5 EXERCISE 1B.3 black Y:\HAESE\IB_HL_OPT-FM\IB_HL_OPT-FM_01\022IB_HL_OPT-FM_01.cdr Monday, 23 June 2014 11:49:49 AM BRIAN IB HL OPT Further Mathematics LINEAR ALGEBRA (Chapter 1) 23 3 Solve each system of linear equations using Gauss elimination on your calculator to write the system in reduced row echelon form. 8 8 x2 + 2x4 = 4 < 3x1 + x2 ¡ x3 = 12 < + 4x4 = 9 x1 ¡ x2 + x3 = ¡8 x1 + x2 a b : : 4x1 ¡ 2x2 + x3 = ¡8 x2 ¡ x3 + x4 = ¡2 8 8 x1 + 2x2 + 3x3 = 4 > > < x1 + x2 ¡ x3 ¡ 4x4 = 1 < x ¡ x + 4x = 7 1 2 3 x1 + 7x2 + 3x3 + 2x4 = 2 c d 3x + 3x2 + 10x3 = 15 : > > : 1 x1 + 13x2 + 7x3 + 8x4 = 3 6x1 + 9x2 + 19x3 = 9 8 8 x1 + x2 + x3 + 2x4 + x5 = 2 > > x + x + x ¡ 2x + 3x = 1 1 2 3 4 5 < x ¡x + x ¡ x + x =3 < 1 2 3 4 5 3x1 ¡ 3x2 + 2x3 ¡ 4x4 ¡ 9x5 = 3 e f + x + 3x + 3x + 3x 3x > : 2 3 4 5 =7 > : 1 2x1 + 2x2 ¡ x3 + 2x4 + 6x5 = 2 + 2x3 + x4 + 2x5 = 5 2x1 SA M PL E 4 A cubic function h(d) = x1 d3 + x2 d2 + x3 d + x4 , 1 6 d 6 2:5, is used to model the height h of a hill in metres above sea level, at a distance d km from the ocean. At the point (1, 12), the gradient of the hill is 0:1 . The point (2:5, 46) is the top of the hill, at which the gradient is zero. (2.5, 46) (1, 12) d (km) 0 ocean a Use the points (1, 12) and (2:5, 46) to write two equations in the unknowns x1 , x2 , x3 , x4 . b The gradient of the hill is modelled by the function h0 (d) = 3x1 d2 + 2x2 d + x3 . i If you have already studied calculus, explain why this is so. ii Use the gradients of the hill at the given points to write two more linear equations. c Solve the system of linear equations to find x1 , x2 , x3 , x4 . d Hence estimate the height of the hill at the point 2 km from the ocean. HOMOGENEOUS EQUATIONS We have seen that a homogeneous system of linear equations has all constant terms zero. 8 It has the form a11 x1 + a12 x2 + :::: + a1n xn = 0 > > > < a x + a x + :::: + a x = 0 21 1 22 2 2n n .. .. .. > > . . . > : a x + a x + :::: + a x = 0. m1 1 m2 2 mn n All homogeneous systems have the trivial solution x1 = x2 = :::: = xn = 0. cyan magenta yellow 95 100 50 75 25 0 5 95 100 50 75 25 0 5 95 100 50 75 25 0 5 95 100 50 75 25 0 5 If a homogeneous system of linear equations is under-specified (so it has more unknowns than equations) then it has infinitely many solutions. black Y:\HAESE\IB_HL_OPT-FM\IB_HL_OPT-FM_01\023IB_HL_OPT-FM_01.cdr Monday, 23 June 2014 11:50:27 AM BRIAN IB HL OPT Further Mathematics 24 LINEAR ALGEBRA (Chapter 1) Example 8 8 x1 + x2 ¡ x3 > > < x ¡ x + x 1 2 3 b + 3x ¡ x 2x > 2 3 > : 1 3x1 ¡ x2 ¡ 2x3 Solve the homogeneous system: ½ x1 + x2 + x3 + 3x4 = 0 a x1 ¡ x2 + x3 ¡ 5x4 = 0 µ 1 1 1 3 0 a The system has AM 1 ¡1 1 ¡5 0 µ ¶ 1 0 1 ¡1 0 » 0 1 0 4 0 =0 =0 =0 =0 ¶ fusing technologyg SA M PL E Let x3 = s and x4 = t. ) x2 + 4t = 0 and x1 + s ¡ t = 0 ) x1 = ¡s + t, x2 = ¡4t, x3 = s, x4 = t, s, t 2 R 0 1 1 1 ¡1 0 B 1 ¡1 1 0 C b The system has AM @ 2 3 ¡1 0 A 3 ¡1 ¡2 0 0 1 1 0 0 0 B0 1 0 0C »@ fusing technologyg 0 0 1 0A 0 0 0 0 ) the only solution is the trivial solution x1 = x2 = x3 = 0. EXERCISE 1B.4 1 Briefly explain why the following systems of homogeneous equations have non-trivial solutions: ½ ½ x + 2y = 0 x1 + x2 ¡ x3 = 0 a b 2x + 4y = 0 x1 + 3x2 + 5x3 = 0 2 Solve the following homogeneous systems of linear equations: 8 8 ½ x1 + x2 =0 < < x1 ¡ x2 + x3 + x4 = 0 x + 3y ¡ z = 0 + x3 = 0 x1 2x1 + x2 ¡ x3 ¡ 2x4 = 0 a b c 2x ¡ y + 5z = 0 : : x1 ¡ x2 + x3 = 0 3x1 ¡ x2 + 2x3 + x4 = 0 ½ (p ¡ 2)x + y = 0 3 The system has a non-trivial solution. Find p. x + (p ¡ 2)y = 0 ½ a1 x + b1 y = 0 4 The system of equations has one solution x = x1 , y = y1 . a2 x + b2 y = 0 cyan magenta yellow 95 100 50 75 25 0 5 95 100 50 75 25 0 5 95 100 50 75 25 0 5 95 100 50 75 25 0 5 a Show that x = cx1 , y = cy1 is a solution for all c 2 R . b If x = x2 , y = y2 is also a solution, show that x = x1 + x2 , y = y1 + y2 is also a solution. black Y:\HAESE\IB_HL_OPT-FM\IB_HL_OPT-FM_01\024IB_HL_OPT-FM_01.cdr Monday, 16 June 2014 9:25:41 AM BRIAN IB HL OPT Further Mathematics









© Copyright 2026