
Document 427151
The European Organisation for Civil Aviation Equipment L’Organisation Européenne pour l’Equipement de l’Aviation Civile EUROCAE DOCUMENT (ED) (MINIMUM AVIATION SYSTEM PERFORMANCE STANDARDS (MASPS) AeroMACS) Draft 0.19, November 2014 This document is the exclusive intellectual and commercial property of EUROCAE. It is presently commercialised by EUROCAE. This electronic copy is delivered to your company/organisation for internal use exclusively. In no case it may be re-sold, or hired, lent or exchanged outside your company. ED-xxx [Month Year] Supersedes ED-xxx 102 rue Etienne Dolet 92240 MALAKOFF, France Web Site: www.eurocae.net Tel: 33 1 40 92 79 30 Fax: 33 1 46 55 62 65 Email: [email protected] EUROCAE DOCUMENT (ED) (MINIMUM AVIATION SYSTEM PERFORMANCE STANDARDS (MASPS) AeroMACS) This document is the exclusive intellectual and commercial property of EUROCAE. It is presently commercialised by EUROCAE. This electronic copy is delivered to your company/organisation for internal use exclusively. In no case it may be re-sold, or hired, lent or exchanged outside your company. ED-xxx [Month Year] Supersedes ED-xxx © EUROCAE, 20XX i FOREWORD 1. 2. 3. 4. This document was prepared jointly by EUROCAE Working Group XX “WG title” <and RTCA SC-xx ‘title’ / SAE xx ‘title’, and was approved by the Council of EUROCAE on [Day Month Year]. EUROCAE is an international non-profit making organisation in Europe. Membership is open to manufacturers and users of equipment for aeronautics, trade associations, national civil aviation administrations, and, under certain conditions, non-European organisations. Its work programme is principally directed to the preparation of performance specifications and guidance documents for civil aviation equipment, for adoption and use at European and world-wide levels. The findings of EUROCAE are resolved after discussion amongst Members of EUROCAE and in collaboration with RTCA Inc, Washington D.C., and/or the Society of Automotive Engineers (SAE), Warrendale PA, U.S.A., through their appropriate committees. This document supersedes ED-xxx <title> (date). The document has been updated to <main rationale>. As compared with the previous version, the main changes are: • <list any significant changes> • 5. 6. 7. <For extensive changes, consider the inclusion of a revision history table as an annex to the document.> This document is technically identical to <RTCA DO-xx / SAE xxx> / <Coordination has been achieved with RTCA SC-xxx title / SAE xxx title.> <If applicable, any significant differences between the EUROCAE and RTCA documents should be listed in an annex to the document.> EUROCAE performance specifications and other documents are recommendations only. EUROCAE is not an official body of the European Governments. Its recommendations are valid as statements of official policy only when adopted by a particular government or conference of governments. Copies of this document may be obtained from: EUROCAE 102, rue Etienne Dolet 92240 MALAKOFF France Telephone: 33 1 40 92 79 30 Fax: 33 1 46 55 62 65 Email: [email protected] Website: www.eurocae.net © EUROCAE, 20XX ii TABLE OF CONTENTS EUROCAE DOCUMENT (ED) (MINIMUM AVIATION SYSTEM PERFORMANCE STANDARDS (MASPS) AEROMACS) ................................................................................. 1 EUROCAE DOCUMENT (ED) (MINIMUM AVIATION SYSTEM PERFORMANCE STANDARDS (MASPS) AEROMACS) ................................................................................. 2 FOREWORD I TABLE OF CONTENTS ........................................................................................................ II LIST OF FIGURES.............................................................................................................. VII LIST OF TABLES ............................................................................................................ IXVII CHAPTER 1 INTRODUCTION ......................................................................................138 1.1 1.2 1.3 1.3.1 1.3.2 1.4 CHAPTER 2 OVERALL SYSTEM DESCRIPTION .....................................................2116 2.1 2.1.1 2.1.2 2.1.3 2.1.4 2.1.5 2.1.6 2.1.7 2.1.8 CHAPTER 3 PURPOSE AND SCOPE ............................................................................ 138 RELATIONSHIPS TO OTHER DOCUMENTS ........................................... 149 DESCRIPTION OF THIS DOCUMENT ...................................................... 149 DOCUMENT CONVENTIONS ................................................................... 149 DEFINITIONS ............................................................................................. 149 REFERENCES ......................................................................................... 1813 NETWORK REFERENCE MODEL ................................................................... 2116 OVERVIEW.................................................................................................. 2116 REFERENCE POINTS ................................................................................... 2217 ASN REFERENCE MODEL ........................................................................... 2217 ASN REFERENCE POINTS ........................................................................... 2419 AEROMACS NETWORK ARCHITECTURE INTEROPERABILITY SCOPE .............. 2419 CSN REFERENCE MODEL ........................................................................... 2419 AEROMACS ASN PROFILE......................................................................... 2419 AEROMACS ASN PROFILE CHOICE ............................................................ 2722 AEROMACS NETWORK ARCHITECTURE ..........................................2823 3.1 3.1.1 3.1.2 3.1.3 3.2 3.2.1 3.2.2 3.2.3 3.2.4 3.3 3.3.1 3.4 FUNCTIONAL REQUIREMENTS ...................................................................... 2823 ACCESS SERVICE NETWORK (ASN) REQUIREMENTS .................................... 2823 CORE SERVICE NETWORK (CSN) REQUIREMENTS........................................ 2823 SERVICE PROVISION REQUIREMENTS .......................................................... 2924 FUNCTIONAL ARCHITECTURE ....................................................................... 2924 BUSINESS ENTITIES (NAP, V-NSP, H-NSP) ................................................ 3025 NETWORK ENTITIES..................................................................................... 3126 ADDRESSING CONCEPT ............................................................................... 3732 NETWORK ENTRY AND NAP/NSP SELECTION ............................................... 3833 AIRPORT NETWORK INFRASTRUCTURE ......................................................... 4136 BARAJAS AIRPORT NETWORK TOPOLOGY...................................................... 4136 DEPLOYMENT MODELS ................................................................................ 4540 © EUROCAE, 20XX iii 3.4.1 3.4.2 3.5 3.5.1 3.5.2 3.5.3 3.5.4 3.5.5 3.5.6 3.5.7 CHAPTER 4 APPLICATIONS.....................................................................................6055 4.1 4.2 4.3 CHAPTER 5 OPERATING ALTITUDE ................................................................................ 7065 COVERAGE ................................................................................................. 7065 ATS AND AOC SUPPORT ............................................................................ 7065 REGISTRATION PROCEDURE ........................................................................ 7065 MOBILITY AND HANDOVER .......................................................................... 7065 PERFORMANCE MONITORING ....................................................................... 7166 SYSTEM SUPERVISION ................................................................................. 7166 AEROMACS TECHNICAL REQUIREMENTS........................................7267 6.1 6.2 6.3 6.4 6.5 6.6 6.7 6.8 CHAPTER 7 OPERATIONAL CONCEPT ............................................................................. 6055 SERVICE INSTANTIATION ............................................................................. 6661 QOS MODEL ............................................................................................... 6762 AEROMACS OPERATIONAL REQUIREMENTS ..................................7065 5.1 5.2 5.3 5.4 5.5 5.6 5.7 CHAPTER 6 NSP & NAP DEPLOYMENT MODELS ............................................................. 4540 ROAMING SCENARIOS ................................................................................. 4843 AEROMACS AIRBORNE ARCHITECTURE ........................................... 5146 FOREWORD ON OVERALL AIRCRAFT SYSTEMS ORGANISATION ....................... 5146 ASSUMPTIONS REGARDING THE INITIAL IMPLEMENTATION OF AIRBORNE AEROMACS SYSTEMS: ............................................................................... 5247 SCENARIO 1-A – “NEAR TERM INITIAL INSTALLATION OF THE AEROMACS MS IN THE AISD DOMAINS”: .................................................................................. 5247 SCENARIO 2-A – “MEDIUM TERM INITIAL INSTALLATION OF THE AEROMACS MS IN THE ACD DOMAIN”: ..................................................................................... 5449 SCENARIO 2-B – “MEDIUM TERM INSTALLATION OF THE AEROMACS MS IN BOTH THE ACD AND AISD DOMAINS” .................................................................... 5550 SCENARIO 3-A – “LONGER TERM INSTALLATION OF THE AEROMACS MS IN THE ACD DOMAIN” ............................................................................................ 5651 SCENARIO 3-B – “LONGER TERM INSTALLATION OF THE AEROMACS MS IN BOTH THE ACD AND AISD DOMAINS” .................................................................... 5752 MIN MAX AIRCRAFT, VEHICLE SPEED ........................................................... 7267 ATS AND AOC SUPPORT ............................................................................ 7267 REGISTRATION PROCEDURE ........................................................................ 7267 MOBILITY AND HANDOVER .......................................................................... 7267 SYNCHRONIZATION AND TIMING REQUIREMENTS .......................................... 7267 DATA LATENCY .......................................................................................... 7368 RESIDUAL ERROR RATE .......................................................................... 7368 SYSTEM SUPERVISION ................................................................................. 7368 QUALITY OF SERVICE REQUIREMENTS............................................7469 7.1 7.1.1 7.1.2 7.1.3 7.1.4 7.1.5 AEROMACS SERVICE FLOWS .................................................................... 7469 EXTENDED REAL-TIME POLLING SERVICE .................................................... 7469 REAL-TIME POLLING SERVICE ..................................................................... 7469 NON-REAL TIME POLLING SERVICE .............................................................. 7469 BEST EFFORT SERVICE ............................................................................... 7469 UNSOLICITED GRANT SERVICE .................................................................... 7570 © EUROCAE, 20XX iv 7.2 CHAPTER 8 SAFETY AND PERFORMANCE REQUIREMENTS ..............................7671 8.1 8.1.1 8.1.2 8.1.3 8.1.4 8.2 8.2.1 8.2.2 8.3 8.3.1 8.3.2 8.3.3 8.4 CHAPTER 9 INPUTS TO COVERAGE AND CAPACITY REQUIREMENTS .................................... 80 AMOUNT OF GATES AND STANDS ..................................................................... 80 AIRPORT AREAS DEFINITIONS.......................................................................... 80 AIRPORT VISITING A/C FRAME TYPES AND AIRPORT TRAFFIC MIX ....................... 80 AIRCRAFT FRAME ANTENNA HEIGHTS FROM GROUND ........................................ 81 TRAFFIC MODELLING AND SCENARIO DEFINITION ............................................. 82 SESAR 15.2.7 AIRPORT CATEGORIZATION..................................................... 85 SYSTEM INTEROPERABILITY .................................................................94 10.1 CHAPTER 11 SAFETY AND PERFORMANCE REQUIREMENTSERROR! BOOKMARK NOT DEFINED.71 DEFINITIONS ............................................... ERROR! BOOKMARK NOT DEFINED.71 DOMAINS OF RESPONSIBILITY ...................... ERROR! BOOKMARK NOT DEFINED.72 SERVICES AND APPLICATIONS ...................... ERROR! BOOKMARK NOT DEFINED.74 SAFETY AND PERFORMANCE REQUIREMENTS APPLICABLE TO ACSP ......... ERROR! BOOKMARK NOT DEFINED.74 SAFETY AND PERFORMANCE REQUIREMENTS: IMPLEMENTATION GUIDANCE ................................................................... ERROR! BOOKMARK NOT DEFINED.75 SOFTWARE ASSURANCE LEVEL REQUIREMENT .............ERROR! BOOKMARK NOT DEFINED.75 GUIDANCE TO MEET THE AVAILABILITY REQUIREMENTS.....ERROR! BOOKMARK NOT DEFINED.75 GUIDANCE TO MEET THE TRANSACTION TIME REQUIREMENTS .. ERROR! BOOKMARK NOT DEFINED.77 CSN FUNCTION .......................................... ERROR! BOOKMARK NOT DEFINED.77 ASN FUNCTION........................................... ERROR! BOOKMARK NOT DEFINED.77 TRAFFIC REQUIREMENTS ............................ ERROR! BOOKMARK NOT DEFINED.78 OVERVIEW OF SPR VALUES ......................... ERROR! BOOKMARK NOT DEFINED.78 COVERAGE AND CAPACITY ...................................................................80 9.1 9.1.1 9.1.2 9.1.3 9.1.4 9.1.5 9.2 CHAPTER 10 PRIORITIZATION .......................................................................................... 7570 MULTI-VENDOR INTEROPERABILITY ................................................................. 94 INTERFERENCE .......................................................................................97 11.1 11.1.1 11.1.2 11.2 11.2.1 11.2.2 11.3 11.3.1 11.3.2 11.3.3 11.4 11.5 REGULATORY ASPECTS .................................................................................. 97 AMT .............................................................................................................. 97 MSS .............................................................................................................. 98 IMPACT OF OUT OF BAND INTERFERENCE ON DEPLOYMENT (MLS)................... 98 SEPARATION REQUIREMENTS .......................................................................... 98 IMPACT ON AEROMACS DEPLOYMENT ............................................................. 99 IMPACT OF IN BAND INTERFERENCE ON DEPLOYMENT (AMT) ........................... 99 UTILISATION OF AMT ON 5 GHZ BY AIRBUS ..................................................... 99 SEPARATION REQUIREMENTS .................................................................. 102101 IMPACT ON AEROMACS DEPLOYMENT ..................................................... 104103 MSS INTERFERENCE ANALYSIS FOR AEROMACS ................................... 104103 POTENTIAL FUTURE INTERFERENCE SOURCES......................................... 107106 © EUROCAE, 20XX v CHAPTER 12 RF CELL DIMENSIONING AND PLANNING ..................................... 108107 12.1 12.1.1 12.1.2 12.2 12.2.1 RF CELL DIMENSIONING ......................................................................... 108107 COVERAGE ANALYSIS .............................................................................. 108107 CAPACITY ANALYSIS ............................................................................... 116115 RF CELL PLANNING ........................................................................... 125124 SIMULATION OF INTRA-SYSTEM INTERFERENCE ......................................... 125124 CHAPTER 13 SECURITY REQUIREMENTS ............................................................ 129127 CHAPTER 14 TEST CASES ..................................................................................... 131129 14.1 IPV6 TEST CASES SPECIFICATION ............................................................ 131129 14.1.1 TEST CONFIGURATION 1 .......................................................................... 131129 14.1.2 TESTS DESCRIPTION ............................................................................... 132129 14.1.3 TC-IPV6-STFUL.................................................................................... 133130 IPV6 CS: STATEFUL CONFIGURATION ..................................................................... 133130 TC-IPV6-STFUL ................................................................................................... 133130 14.1.4 TC-IPV6-STLESS-BV ........................................................................... 134131 IPV6 CS: STATELESS CONFIGURATION (VALID BEHAVIOUR) ..................................... 134131 TC-IPV6-STLESS-BV .......................................................................................... 134131 14.1.5 TC-IPV6-STLESS-BI ............................................................................. 135132 IPV6 CS: STATELESS CONFIGURATION (INVALID BEHAVIOUR) .................................. 135132 TC-IPV6-STLESS-BI............................................................................................ 135132 THE AEROMACS SYSTEM SUPPORTS STATELESS ADDRESS AUTO-CONFIGURATION IN THE CASE OF INVALID BEHAVIOUR. ................................................................. 135132 14.1.6 TC-IPV6-FRAG..................................................................................... 135132 IPV6 CS: IPV6 FRAGMENTATION ............................................................................ 135132 TC-IPV6-FRAG .................................................................................................... 135132 14.2 ETHERNET CS TEST CASES SPECIFICATION.............................................. 136133 14.2.1 TEST CONFIGURATION 1 .......................................................................... 136133 14.2.2 TESTS DESCRIPTION ............................................................................... 138134 14.2.3 TC-ETH-CS-IP_RULE ........................................................................... 139135 ETHERNET CS: IP HEADER BASED CLASSIFICATION ................................................. 139135 TC-ETH-CS-IP_RULE........................................................................................... 139135 14.2.4 TC-ETH-CS-VLAN_RULE ..................................................................... 140136 ETHERNET CS: IP HEADER BASED CLASSIFICATION ................................................. 140136 TC-ETH-CS-VLAN_RULE .................................................................................... 140136 14.2.5 TC-ETH-CS-TOS_RULE ........................................................................ 141137 ETHERNET CS: TYPE OF SERVICE BASED CLASSIFICATION ...................................... 141137 TC-ETH-CS-TOS_RULE ....................................................................................... 141137 THE AEROMACS SYSTEM SUPPORTS TYPE OF SERVICE BASED CLASSIFICATION. .... 141137 14.3 CONVERGENCE SUBLAYER ESTABLISHMENT ............................................ 143139 14.3.1 TEST CONFIGURATION 1 .......................................................................... 143139 14.3.2 TESTS DESCRIPTION ............................................................................... 143139 14.3.3 TC-CS-IPV6_FB ................................................................................... 144140 14.3.4 TC-CS-ETH_FB.................................................................................... 144140 14.4 D-TAXI TEST CASES .............................................................................. 145141 CM-LOGON: NOMINAL CASE ................................................................................... 145142 © EUROCAE, 20XX vi CM_001 145142 CPDLC CONNECTION: ACCEPTED .......................................................................... 146143 CPDLC_001 ......................................................................................................... 146143 THE PURPOSE OF THIS TEST IS TO VERIFY THE GROUND SYSTEM CORRECTLY HANDLES THE CPDLC CONNECTION PROCEDURE WITH A LOGGED AIRCRAFT. IN THIS TEST, THE REQUEST IS ACCEPTED. .......................................................................... 146143 THIS TEST ALSO INCLUDES THE CPDLC MESSAGE EXCHANGES ALLOWING TO CONSIDER CPDLC ENABLED (ASSIGNMENT OF THE GROUND SYSTEM AS CDA, PROVISION OF THE UNIT NAME OF THE R-ATSU). ...................................................... 146143 IT IS ASSUMED THAT AIRCRAFT1 IS ALREADY LOGGED TO THE GROUND SYSTEM (C.F. TEST CM_001). .............................................................................................. 146143 SEND A CPDLC-START REQUEST TO AIRCRAFT1 (NO CPDLC MESSAGE ELEMENT PROVIDED). ............................................................................................ 146143 CHECK AIRCRAFT1 RECEIVES THE CPDLC-START INDICATION (NO CPDLC MESSAGE ELEMENT PROVIDED) FROM GND1........................................................... 146143 SEND AN ACCEPTED CPDLC-START RESPONSE TO GND1. ..................................... 146143 CHECK GND1 RECEIVES THE ACCEPTED CPDLC-START CONFIRMATION FROM AIRCRAFT1. ........................................................................................ 146143 SEND THE DM99 CURRENT DATA AUTHORITY MESSAGE TO GND1 ................. 146143 CHECK GND1 RECEIVES THE DM99 CURRENT DATA AUTHORITY MESSAGE FROM AIRCRAFT1. ........................................................................................ 146143 SEND THE UM227 LACK MESSAGE TO AIRCRAFT1 TO ACKNOWLEDGE DM99 CURRENT DATA AUTHORITY MESSAGE. ............................................................. 146143 CHECK AIRCRAFT1 RECEIVES THE UM227 LACK MESSAGE FROM GND1 ACKNOWLEDGING THE DM99 CURRENT DATA AUTHORITY MESSAGE. .............................................................................................................. 146143 SEND THE UM183 'CURRENT ATC UNIT FACILITY DESIGNATION, FACILITY NAME,FACILITY FUNCTION' MESSAGE TO AIRCRAFT1 .................................................... 146143 CHECK AIRCRAFT1 RECEIVES THE UM183 'CURRENT ATC UNIT FACILITY DESIGNATION, FACILITY NAME, FACILITY FUNCTION' MESSAGE................... 146143 SEND THE DM100 LACK MESSAGE TO ACKNOWLEDGE THE UM183 'CURRENT ATC UNIT FACILITY DESIGNATION, FACILITY NAME, FACILITY FUNCTION' MESSAGE .............................................................................................................. 146143 CHECK GND1 RECEIVES THE DM100 LACK MESSAGE ACKNOWLEDGING THE UM183 'CURRENT ATC UNIT FACILITY DESIGNATION, FACILITY NAME, FACILITY FUNCTION' MESSAGE ............................................................................... 146143 CHECK AIRCRAFT1 APPEARS AS LOGGED ON AND CPDLC CONNECTED TO GND1. .............................................................................................................. 146143 CPDLC D_TAXI STARTUP ................................................................................. 147144 TAXI_001 ............................................................................................................. 147144 THE PURPOSE OF THIS TEST IS TO VERIFY THE GROUND SYSTEM CORRECTLY HANDLES THE CPDLC TAXI STARTUP ......................................................................... 147144 CPDLC_001 ......................................................................................................... 147144 SEND THE DM25 REQUEST [START-UP] CLEARANCE .................................... 147144 CHECK GND1 RECEIVES THE DM25 REQUEST [START-UP] CLEARANCE ....... 147144 SEND THE UM227 LACK MESSAGE TO AIRCRAFT1 TO ACKNOWLEDGE DM25 REQUEST [START-UP] CLEARANCE MESSAGE. ................................................. 147144 CHECK AIRCRAFT1 RECEIVES THE UM227 LACK MESSAGE FROM GND1 ACKNOWLEDGING THE DM25 REQUEST [START-UP] CLEARANCE MESSAGE. .............................................................................................. 147144 SEND THE UM311 START UP APPROVED .......................................................... 147144 CHECK AIRCRAFT1 RECEIVES THE UM311 START UP APPROVED................... 147144 © EUROCAE, 20XX vii SEND THE DM100 LACK MESSAGE TO GND1 TO ACKNOWLEDGE THE UM311 START UP APPROVED ......................................................................................... 147144 CHECK GND1 RECEIVES THE DM100 LACK FROM AIRCRAFT1 ACKNOWLEDGING THE UM311 START UP APPROVED .......................................................... 147144 APPENDIX A GUIDELINES FOR <XXX> ................................................................. 148145 APPENDIX B ACRONYMS AND GLOSSARY OF TERMS ...................................... 149146 APPENDIX C CAPACITY ANALYSIS ...................................................................... 153150 C.1 C.1.1 C.1.2 C.2 C.2.1 C.2.2 C.2.3 C.2.4 C.2.5 C.2.6 C.2.7 1. 2. 3. A. B. C. 4. APPENDIX D CAPACITY ANALYSIS PER OPERATIONAL DOMAIN ...................................... 153150 HYPOTHESES MADE IN SIMULATIONS ........................................................ 153150 ANALYSIS OF RESULTS ............................................................................ 159156 CAPACITY ANALYSIS PER AIRPORT .......................................................... 163160 OPERATIONAL CONCEPT.......................................................................... 163160 PROPAGATION AND PHY/MAC LAYER MODEL .......................................... 164161 SCENARIO 1 ........................................................................................... 165162 SCENARIO 2 ........................................................................................... 172169 QOS MODEL ........................................................................................... 178175 HANDOVER CONFIGURATION.................................................................... 180176 BACKGROUND TRAFFIC ........................................................................... 181178 AIR TRAFFIC FIGURES IN MADRID BARAJAS............................................... 181178 BACKGROUND TRAFFIC MODEL ................................................................ 181178 SIMULATION RESULTS ............................................................................. 184181 SCENARIO 1 – SIMULATION RESULTS ....................................................... 185182 SCENARIO 2– SIMULATION RESULTS........................................................ 191188 COMPARISON BETWEEN ITERATION 1 AND ITERATION 2 FOR SCENARIO 1. .. 197194 HANDOVER RESULTS............................................................................... 202199 AEROMACS DEPLOYMENT CASE STUDIES .................................. 205202 D.1 D.2 D.2.1 D.2.2 D.2.3 D.3 D.3.1 D.3.2 PREAMBLE: RADIO PLANNING TOOL AND PARAMETERS ....................... 205202 CASE STUDY 1: AEROMACS DEPLOYMENT AT BARAJAS AIRPORT .......... 207204 GLOBAL RADIO COVERAGE IN BARAJAS AIRPORT (DL)............................... 213210 RADIO COVERAGE LIMITED BY THE UPLINK (UL)........................................ 218215 CONCLUSIONS AND RECOMMENDATION .................................................... 220217 CASE STUDY 2: AEROMACS DEPLOYMENT AT TOULOUSE AIRPORT ........ 222219 GLOBAL RADIO COVERAGE IN TOULOUSE AIRPORT .................................... 222219 SIMULATION OF INTER-SYSTEM INTERFERENCES IN TOULOUSE .................. 225222 APPENDIX E HISTORY AND TERMS OF REFERENCE OF WG-82ERROR! BOOKMARK NOT DEFINED.233 APPENDIX F WG-82 MEMBERSHIP ....................................................................... 236234 IMPROVEMENT SUGGESTION FORM ....................................................................... 237235 LIST OF FIGURES FIGURE 1: ILLUSTRATION OF REFERENCE POINTS FOR THE MAXIMUM DATA LATENCY.................................... 17 © EUROCAE, 20XX viii FIGURE 2: NETWORK REFERENCE MODEL................................................................................................. 22 FIGURE 3: ASN REFERENCE MODEL ........................................................................................................ 23 FIGURE 4: WMF ASN PROFILE A ............................................................................................................. 25 FIGURE 5: WMF ASN PROFILE B ............................................................................................................. 26 FIGURE 6: WMF ASN PROFILE C ............................................................................................................. 27 FIGURE 7: OVERALL RELATIONS BETWEEN AEROMACS BUSINESS ENTITIES [10] ........................................ 30 FIGURE 8: AEROMACS NETWORK ENTITIES .............................................................................................. 32 FIGURE 9: MAIN FUNCTIONALITIES OF AEROMACS ASN-GW [10]............................................................. 33 FIGURE 10: AEROMACS AAA AND HA DEPLOYMENT SCENARIO ............................................................... 36 FIGURE 11: ICAO WG-I #7 RECOMMENDED FORMAT................................................................................. 37 FIGURE 12: ILLUSTRATION OF SANDRA ADDRESSING CONCEPT. ............................................................... 38 FIGURE 13: BARAJAS TERMINAL MAP OVERVIEW ........................................................................................ 42 FIGURE 14: BARAJAS MULTISERVICE AIRPORT NETWORK TOPOLOGY ........................................................ 43 FIGURE 15: BARAJAS RADIO NAVIGATION AIDS CABLING INFRASTRUCTURE .................................................. 44 FIGURE 16: BARAJAS MLAT SYSTEM CABLING INFRASTRUCTURE ............................................................... 45 FIGURE 17: SINGLE NAP - MULTIPLE NSP................................................................................................ 46 FIGURE 18: MULTIPLE NAP - SINGLE NSP................................................................................................ 46 FIGURE 19: GREENFIELD NAP-NSP ......................................................................................................... 47 FIGURE 20: AEROMACS ROAMING ARCHITECTURE ................................................................................... 49 FIGURE 21: ROAMING SCENARIO 1 [49] ..................................................................................................... 50 FIGURE 22:ROAMING SCENARIO 2 [49]...................................................................................................... 50 FIGURE 23: AEROMACS SYSTEM INTEGRATION ON A/C – SCENARIO 1-A................................................... 53 FIGURE 24: AEROMACS SYSTEM INTEGRATION ON A/C – SCENARIO 1-B................................................... 54 FIGURE 25: AEROMACS SYSTEM INTEGRATION ON A/C – SCENARIO 2-A................................................... 55 FIGURE 26: AEROMACS SYSTEM INTEGRATION ON A/C – SCENARIO 2-B................................................... 56 FIGURE 27: SCENARIO 2-B: CONNECTION BETWEEN AEROMACS AND ACD/AISD ..................................... 56 FIGURE 28: AEROMACS SYSTEM INTEGRATION ON A/C – SCENARIO 3-A................................................... 57 FIGURE 29: AEROMACS SYSTEM INTEGRATION ON A/C – SCENARIO 3-B................................................... 58 FIGURE 30: SCENARIO 3-B: CONNECTION BETWEEN AEROMACS AND ACD/AISD ..................................... 58 FIGURE 31: PHYSICAL SEGREGATION BETWEEN ACD AND AISD ................................................................ 59 FIGURE 32: FLIGHT PHASES AND EVENTS IN APT SURFACE ........................................................................ 60 FIGURE 33: SEQUENTIAL EXECUTION OF SERVICES IN ARRIVAL ................................................................... 66 FIGURE 34: SEQUENTIAL EXECUTION OF SERVICES IN DEPARTURE.............................................................. 67 FIGURE 35: DEFINITION AND INTERCONNECTION OF AIRCRAFT, ACSP AND ATSU DOMAIN .......................... 76 FIGURE 36: FRESNEL ZONE DETERMINATION PARAMETERS ..................................................................... 89 FIGURE 37: MINIMUM DISTANCE BETWEEN MLS TRANSMITTER AND AEROMACS RECEIVER [19] ................. 99 FIGURE 38: RECEPTION ANTENNA COVERAGE (20000 FT) ....................................................................... 101 FIGURE 39: MINIMUM SPATIAL SEPARATION AS FUNCTION OF SPECTRAL ISOLATION. TOTAL ISOLATION IS 154 DB. ................................................................................................................................................ 103 FIGURE 40: ITU-R-F-1336-2 REFERENCE ANTENNA PATTERNS AND MASK [43] ......................................... 106 FIGURE 41: COMPARISON OF AIRPORT PATHLOSS MODELS....................................................................... 111 FIGURE 42: GRAPHICAL PRESENTATION OF TILE IN UL-PUSC ZONE ; SLOT = 6 TILES OVER 3 SYMBOLS .... 113 FIGURE 43: FREQUENCY MASK............................................................................................................... 116 FIGURE 44: BER AND PER IN FL, LOS CHANNEL ([50], SECTION 4.4) ...................................................... 118 FIGURE 45: BER AND PER IN FL, NLOS CHANNEL [50] .......................................................................... 119 FIGURE 46: BER AND PER FOR RL, LOS CHANNEL [50] ......................................................................... 120 FIGURE 47: BER AND PER FOR RL, NLOS CHANNEL [50]....................................................................... 121 FIGURE 48: MAP OF C/I INTRA-SYSTEM INTERFERENCE, BASED ON DL COVERAGE ................................... 127 © EUROCAE, 20XX ix FIGURE 49: IPV6 TEST CASES TEST CONFIGURATION ........................................................................ 131130 FIGURE 50: ETHERNET CS TEST CASES TEST CONFIGURATION .......................................................... 136135 FIGURE 51: CS ESTABLISHMENT TEST CASES TEST CONFIGURATION ................................................. 143142 FEHLER! ES IST NICHT MÖGLICH, DURCH DIE BEARBEITUNG VON FELDFUNKTIONEN OBJEKTE ZU ERSTELLEN. FIGURE 52: END-TO-END TEST CASE CONFIGURATION......................................................... 145144 FIGURE 49: MOBILE ROUTE MR1 ..................................................................................................... 157156 FIGURE 50: MOBILE ROUTE MR2 ..................................................................................................... 157156 FIGURE 51: THROUGHPUT & PACKET LOSS WITH ARQ TYPE 1 AND ARQ TYPE 2 (UL) ........................................... 160159 FIGURE 52: CASE 1: THROUGHPUT & PACKET LOSS IN LOS/NLOS (DL) ............................................................. 162161 FIGURE 53: CASE 2: THROUGHPUT & PACKET LOSS IN LOS/NLOS (DL) ............................................................. 162161 FIGURE 54: CASE 3: THROUGHPUT & PACKET LOSS IN LOS/NLOS (DL) ............................................................. 163162 FIGURE 55: SCENARIO 1 ARRIVAL TRAJECTORY ............................................................................................ 166165 FIGURE 56: SCENARIO 1 DEPARTURE TRAJECTORY ........................................................................................ 169168 FIGURE 57: SCENARIO 2 ARRIVAL TRAJECTORY ............................................................................................ 173172 FIGURE 58: SCENARIO 2 DEPARTURE TRAJECTORY ........................................................................................ 176175 FIGURE 59: UL/DL W IMAX FRAME. DATA BURST USAGE IN % .......................................................... 191190 FIGURE 60: UL/DL W IMAX FRAME. DATA BURST USAGE IN % .......................................................... 197196 FIGURE 61: W IMAX DOWNLINK DATA BURST USAGE. RED=ITERATION2. BLUE=ITERATION1. ............. 201200 FIGURE 62: W IMAX UPLINK DATA BURST USAGE. RED=ITERATION2. BLUE=ITERATION1. .................. 202201 FIGURE 63: HORIZONTAL AND VERTICAL PATTERN FOR BASE STATIONS (H: 3DB BEAMWIDTH = 110°; V: 3DB BEAMWIDTH = 12° (TBC)) .......................................................................................................... 206205 FIGURE 64: PROPOSED CELL PLANNING IN MADRID BARAJAS ............................................................. 210209 FIGURE 65: PROPOSED CELL PLANNING IN MADRID BARAJAS – CLOSER DISTANCE BETWEEN BS IN HANDOVER ................................................................................................................................................ 212211 FIGURE 66: PROPOSED CELL PLANNING IN MADRID BARAJAS – RAMP ONLY ...................................... 212211 FIGURE 67: FOCUS ON BS POSITION AND LABEL ON BARAJAS’ AIRPORT .............................................. 214213 FIGURE 68: GLOBAL COVERAGE (DL) IN COMPOSITE SERVER DISPLAY: VEHICULES WITH HANT=2M(LEFT) – AIRCRAFTS WITH HANT=10M (RIGHT)........................................................................................ 215214 FIGURE 69: R1S1 COVERAGE FOR HANT=2M(LEFT) AND HANT=10M (RIGHT) ...................................... 217216 FIGURE 70: GLOBAL COVERAGE (LIMITED BY UL) IN COMPOSITE SERVER DISPLAY: VEHICULES WITH HANT=2M (LEFT) – AIRCRAFTS WITH HANT=10M (RIGHT) ........................................................................... 219218 FIGURE 71: R1S1 RADIO COVERAGE (LIMITED BY UL), AIRCRAFTS WITH HANT=10M............................ 220219 FIGURE 72: GLOBAL COVERAGE (DL) IN COMPOSITE SERVER DISPLAY: VEHICULES WITH HANT=2M(LEFT) – AIRCRAFTS WITH HANT=10M (RIGHT)........................................................................................ 222221 FIGURE 73: GLOBAL COVERAGE FOR AIRCRAFTS (HANT = 10M) IN COMPOSITE SERVER DISPLAY: DL COVERAGE(LEFT) – DL COVERAGE LIMITED BY UL (RIGHT).......................................................... 223222 FIGURE 74: GLOBAL COVERAGE FOR AIRCRAFTS (HANT = 10M) IN COMPOSITE SERVER DISPLAY: DL COVERAGE LIMITED, NO REFLECTIONS CONSIDERED DOWNTILT FOR BS1 (S1 & S2) HAS BEEN INCREASED FROM 5 TO 7° ........................................................................................................................... 224223 FIGURE 75: BS2 COVERAGE - AIRCRAFTS WITH HANT=10M, NO REFLECTIONS CONSIDERED DL (LEFT) - DL LIMITED BY UL (RIGHT) .............................................................................................................. 225224 FIGURE 76: LOCALIZATION OF AEROMACS BS (IN RED, BS TOWER WITH 2 SECTORS BSS1 AND BSS2) AND TX MLS STATIONS (MLS AZ AND MLS EL IN YELLOW) AND RX MLS STATIONS (RX AZ AND RX EL IN MAGENTA) ................................................................................................................................ 226225 FIGURE 77: RADIATION PATTERNS ATTACHED TO EACH MLS TRANSMITTING STATION .......................... 228227 FIGURE 78: SCHEMATIC REPRESENTATION OF TX MLS STATIONS H PATTERNS OVER TOULOUSE AIRPORT ................................................................................................................................................ 228227 FIGURE 79: RADIATION PATTERNS ATTACHED TO EACH MLS RECEIVING STATIONS .............................. 230229 FIGURE 80: RADIATION PATTERNS OF ANTENNAS ATTACHED TO AEROMACS STATIONS ...................... 230229 © EUROCAE, 20XX x FIGURE 81: THRESHOLD DEGRADATION MAP FOR TX MLS VS. AEROMACS DL COVERAGE - NO REJECTION ................................................................................................................................................ 234233 FIGURE 82: THRESHOLD DEGRADATION MAP FOR TX MLS VS. AEROMACS DL COVERAGE – 70 DB REJECTION ............................................................................................................................... 234233 LIST OF TABLES TABLE 1: POSSIBLE ACTORS FOR NAP/V-NSP/H-NSP FUNCTIONS............................................................ 31 TABLE 2: NSP ID FORMAT [32] ................................................................................................................. 40 TABLE 3: AEROMACS DEPLOYMENT SCENARIOS PROPOSED...................................................................... 47 TABLE 4: SERVICES EXECUTED DURING DEPARTURE PHASE ....................................................................... 62 TABLE 5: SERVICES EXECUTED DURING ARRIVAL PHASE ............................................................................. 65 TABLE 6: ATN/IPS PRIORITY MAPPING INTO CLASSES PROPOSED BY [12] ................................................... 68 TABLE 7: COS CLASSIFICATION FOR AIRPORT CAPACITY ANALYSIS ............................................................ 69 TABLE 8: AEROMACS CLASSES OF SERVICE EXAMPLE [3].......................................................................... 75 TABLE 9: ACSP TRANSACTION TIME REQUIREMENTS [40] ......................................................................... 77 TABLE 10: ACSP AVAILABILITY REQUIREMENTS [40] ................................................................................. 78 TABLE 11: ATC AND AOC REQUIRED THROUGHPUT AND PACKET SIZES ...................................................... 79 TABLE 12: A/C SEPARATION MINIMA .......................................................................................................... 81 TABLE 13: AIRFRAME HEIGHTS WITH RESPECT TO GROUND ........................................................................ 81 TABLE 14: A/C DWELL TIMES VS A/C AIRPORT OPERATION AREAS .............................................................. 82 TABLE 15: AEROMACS EXPECTED THROUGHPUTS VS MODULATION SCHEMES ............................................ 83 TABLE 16: SINGLE SECTOR SCENARIO – EXCLUDING FOQA....................................................................... 84 TABLE 17: AIRPORT SIZE CATEGORIES ACCORDING TO COCR ................................................................... 84 TABLE 18: AIRPORT CAPACITY LOAD FOR SMALL AIRPORTS (3 OPERATIONS/HOUR) ...................................... 85 TABLE 19: AIRPORT CAPACITY LOAD FOR SMALL AIRPORTS (3 OPERATIONS/HOUR) CONSIDERING FOQA AS A RAMP SERVICE................................................................................................................................ 86 TABLE 20: AIRPORT CAPACITY LOAD FOR SMALL AIRPORTS (20 OPERATIONS/HOUR) .................................... 87 TABLE 21: AIRPORT CAPACITY LOAD FOR MEDIUM AIRPORTS (50 OPERATIONS/HOUR) ................................. 89 TABLE 22: AIRPORT CAPACITY LOAD FOR LARGE AIRPORTS (100 OPERATIONS/HOUR) ................................. 91 TABLE 23: AIRPORT CAPACITY LOAD FOR VERY LARGE AIRPORTS (MORE THAN 100 OPERATIONS/HOUR) ...... 92 TABLE 24: TELEMETRY FREQUENCY ALLOCATIONS (USA) [20] ................................................................... 97 TABLE 25: AMT CHARACTERISTICS ......................................................................................................... 102 TABLE 26: DL LINK BUDGET ................................................................................................................... 112 TABLE 27: UL LINK BUDGET ................................................................................................................... 115 TABLE 28: W ALL ATTENUATION VALUES .................................................................................................. 115 TABLE 29: W INDOW ATTENUATION VALUES.............................................................................................. 115 TABLE 30: MCS SWITCHING THRESHOLDS .............................................................................................. 122 TABLE 31: MAXIMUM COVERAGE RESULTS............................................................................................... 123 TABLE 32: FREQUENCY PLANNING & REUSE FOR INTRA-SYSTEM INTERFERENCE ANALYSIS ........................ 125 TABLE 33: C/I VERSUS MODULATION SCHEMES ....................................................................................... 127 TABLE 34: SERVICE DATA UNIT DIMENSIONING (BYTES)..................................................................... 154153 TABLE 35: PHY LAYER PARAMETERS................................................................................................ 154153 TABLE 36: MCS SWITCHING THRESHOLDS ........................................................................................ 155154 TABLE 37: BARAJAS PATHLOSS MODELS’ PARAMETERS ..................................................................... 156155 TABLE 38: MAIN ARQ PARAMETERS ................................................................................................. 158157 TABLE 39: SECONDARY-LEVEL ARQ PARAMETERS ............................................................................ 158157 TABLE 40: SIZE OF PDU AND ARQ BLOCKS ...................................................................................... 159158 TABLE 41: ARRIVAL SPEEDS ............................................................................................................. 165164 © EUROCAE, 20XX xi TABLE 42: DEPARTURE SPEEDS........................................................................................................ 165164 TABLE 43: SCENARIO 1 ARRIVAL TRAJECTORY TIMES ......................................................................... 167166 TABLE 44: CHRONOLOGICAL DESCRIPTION OF SCENARIO 1 ARRIVAL TRAJECTORY............................... 168167 TABLE 45: SCENARIO 1 DEPARTURE TRAJECTORY TIMES.................................................................... 170169 TABLE 46: CHRONOLOGICAL DESCRIPTION OF SCENARIO 1 DEPARTURE TRAJECTORY ......................... 172171 TABLE 47: SCENARIO 2 ARRIVAL TRAJECTORY TIMES ......................................................................... 174173 TABLE 48: CHRONOLOGICAL DESCRIPTION OF SCENARIO 2 ARRIVAL TRAJECTORY............................... 175174 TABLE 49: SCENARIO 2 DEPARTURE TRAJECTORY TIMES.................................................................... 176175 TABLE 50: CHRONOLOGICAL DESCRIPTION OF SCENARIO 2 DEPARTURE TRAJECTORY ......................... 178177 TABLE 51: COS CLASSIFICATION FOR AIRPORT CAPACITY ANALYSIS .................................................. 179178 TABLE 52: HANDOVER PARAMETERS ................................................................................................. 180179 TABLE 53: RAMP ARRIVAL BACKGROUND TRAFFIC ........................................................................... 182181 TABLE 54: RAMP DEPARTURE BACKGROUND TRAFFIC ...................................................................... 182181 TABLE 55: GROUND ARRIVAL BACKGROUND TRAFFIC ...................................................................... 182181 TABLE 56: GROUND DEPARTURE BACKGROUND TRAFFIC ................................................................ 182181 TABLE 57: TOWER ARRIVAL BACKGROUND TRAFFIC ........................................................................ 183182 TABLE 58: TOWER DEPARTURE BACKGROUND TRAFFIC ................................................................... 183182 TABLE 59: UL&DL BACKGROUND TRAFFIC ....................................................................................... 183182 TABLE 60: CELL PLANNING FEATURES USED IN CAPACITY SIMULATIONS............................................... 185184 TABLE 61: END TO END DELAY PER CLASS OF SERVICE ..................................................................... 186185 TABLE 62: NET SERVICES RESPONSE TIME ...................................................................................... 186185 TABLE 63: ATC1 SERVICES RESPONSE TIME .................................................................................... 186185 TABLE 64: ATC2 SERVICES RESPONSE TIME .................................................................................... 187186 TABLE 65: ATC3 SERVICES RESPONSE TIME .................................................................................... 187186 TABLE 66: AOC1 SERVICES RESPONSE TIME ................................................................................... 189188 TABLE 67: AOC2 SERVICES RESPONSE TIME ................................................................................... 189188 TABLE 68: END TO END DELAY PER CLASS OF SERVICE ..................................................................... 192191 TABLE 69: NET SERVICES RESPONSE TIME ...................................................................................... 192191 TABLE 70: ATC1 SERVICES RESPONSE TIME .................................................................................... 192191 TABLE 71: ATC2 SERVICES RESPONSE ............................................................................................ 193192 TABLE 72: ATC3 SERVICES RESPONSE ............................................................................................ 193192 TABLE 73: AOC1 SERVICES RESPONSE TIME ................................................................................... 195194 TABLE 74: AOC2 SERVICES RESPONSE TIME ................................................................................... 195194 TABLE 75: SUMMARY OF BS NUMBER AND BACKGROUND TRAFFIC FIGURES PER ITERATION ................. 198197 TABLE 76: QOS CONFIGURATION FOR ITERATION 1 AND ITERATION 2 .................................................. 199198 TABLE 77: RESULTS ON PACKET LATENCY FOR ITERATION 1 AND ITERATION 2. SCENARIO 1 ................. 199198 TABLE 78: CAPACITY LIMITATIONS IN ITERATION 1 SOLVED IN ITERATION 2 .......................................... 200199 TABLE 79: RESULTS FOR HO PERFORMANCE. CONSECUTIVE BS DISTANCE = 2650 M / 1300 M ........... 203202 TABLE 80: BS COORDINATES PROPOSED FOR MADRID BARAJAS PLANNING......................................... 208207 TABLE 81: FREQUENCY RE-USE PLANNING PROPOSAL........................................................................ 208207 FEHLER! ES IST NICHT MÖGLICH, DURCH DIE BEARBEITUNG VON FELDFUNKTIONEN OBJEKTE ZU ERSTELLEN.TABLE 82: CAPACITY PLANNING FIGURES IN MADRID BARAJAS .................................. 213212 TABLE 83: CALCULATION OF CELL RANGE (DL IN M) FOR EACH MODULATION SCHEME AND MS CATEGORY (BASED ON R1S1 COVERAGE, NEAR LOS DIRECTION) ................................................................. 216215 TABLE 84: CALCULATION OF CELL RANGE (DL IN M) FOR EACH MODULATION SCHEME AND MS CATEGORY (BASED ON R1S1 COVERAGE, NLOS DIRECTION) ....................................................................... 218217 TABLE 85: DL COVERAGE AND REVERSE COVERAGE .......................................................................... 220219 TABLE 86: BS2 RANGE FOR DL AND DL LIMITED BY UL ..................................................................... 225224 TABLE 87: AZIMUT AND ELEVATION TX MLS STATION PARAMETERS ................................................... 227226 © EUROCAE, 20XX xii TABLE 88: AZIMUT AND ELEVATION RX MLS STATION PARAMETERS ................................................... 229228 TABLE 89: PARAMETERS OF AEROMACS STATIONS .......................................................................... 230229 FEHLER! ES IST NICHT MÖGLICH, DURCH DIE BEARBEITUNG VON FELDFUNKTIONEN OBJEKTE ZU ERSTELLEN.TABLE 90: TD CALCULATION FOR INTERFERENCE ON MLS RECEIVING STATIONS ....... 232231 FEHLER! ES IST NICHT MÖGLICH, DURCH DIE BEARBEITUNG VON FELDFUNKTIONEN OBJEKTE ZU ERSTELLEN.TABLE 91: TD CALCULATION FOR INTERFERENCE ON AEROMACS BASE STATIONS.... 232231 © EUROCAE, 20XX 13 CHAPTER 1 1.1 INTRODUCTION PURPOSE AND SCOPE This document contains Minimum Aviation System Performance Specification (MASPS) for an Aeronautical Mobile Airport Communication System (AeroMACS). The purpose of this MASPS is to define the system performance requirements and to outline possible implementation options (architectures, use cases) for AeroMACS. In case standards have not yet been developed (like for the IP addressing scheme) it provides recommendations for further consideration in the according standardisation bodies. In addition to this MASPS, EUROCAE WG-82 has also developed other AeroMACS standards and in particular the AeroMACS Profile (ED-222) and the AeroMACS MOPS (ED-223) jointly with RTCA SC-223. During the development of the present document it turned out that not all implementation relevant parts of the system have been defined, like IP addressing scheme and security frame work. It is expected that after having agreed on these implementation relevant subjects within ICAO that AeroMACS MASPS have to be amended accordingly. Chapter 2 of this document provides the description of the network reference model including the AeroMACS functional entities and reference points over which interoperability is achieved between functional entities. Chapter 3 discusses different implementation architectures. This includes the whole end-to-end communication chain and deals with the ground and airborne architectural components as well. In that context a recommendation regarding an IP addressing scheme within the ICAO community is proposed. Chapter 4 describes potential ATC and AOC applications for AeroMACS. Further on it defines scenarios, which have been used to validate performance requirements for AeroMACS. Chapter 5 summarizes AeroMACS operation requirements. Chapter 6 summarizes AeroMACS technical requirements. Chapter 7 provides the QoS requirements for AeroMACS. Chapter 8 gives an overview on the Safety and Performance requirements derived from EUROCAE WG-78 work. Therefore the requirements are based on an end-toend perspective. Regarding the functional entities of AeroMACS as described in Chapter 2 Safety and Performance recommendations are given as well. Chapter 9 deals specifically with aspects of physical coverage and capacity of the AeroMACS system. Chapter 10 outlines AeroMACS interoperability requirements. Chapter 11 deals with AeroMACS interference aspects. It deals with AeroMACS internal and external interference aspects. © EUROCAE, 20XX 14 Chapter 12 provides information related to RF cell dimensioning and planning. This material is an extract of SESAR material, which is used to define simulation scenarios for investigation and validation of certain AeroMACS functions as support of the AeroMACS validation effort. Finally this simulation effort is used within Chapter 9 to clarify the AeroMACS SPR behaviour. Chapter 13 outlines AeroMACS Security requirements. Chapter 14 describes a set of system level tests on one side and an end-to-end test case on the other side. The end-to-end test case is similar to the one described in the DLS Community Specification [52][52][57], which is defined to prove the interoperability of implemented constituents from an application level perspective. Appendix A provides guidelines for ED-227[AS1]. Appendix B outlines the list of acronyms and glossary of terms Appendix C gives more information about a capacity analysis conducted within SJU P15.2.7. Appendix D includes material from SJU P15.2.7 related to AeroMACS deployment case studies. Appendix E provides the list of EUROCAE WG-82 members. 1.2 RELATIONSHIPS TO OTHER DOCUMENTS Most of the text material has been made available by SESAR Projects P15.2.7 and P 9.16. As far as required these material has been updated in order to reflect the status of work within EUROCAE WG-82 at the time of publication of the present document. 1.3 1.3.1 DESCRIPTION OF THIS DOCUMENT DOCUMENT CONVENTIONS “SHALL” The use of the word SHALL indicates a mandated criterion; i.e. compliance with the particular procedure or specification is mandatory and no alternative may be applied. “SHOULD” The use of the word SHOULD (and phrases such as “IT IS RECOMMENDED THAT ...”, etc.) indicate that though the procedure or criterion is regarded as the preferred option, alternative procedures, specifications or criteria may be applied, provided that the manufacturer, installer or tester can provide information or data to adequately support and justify the alternative. “MAY[AS2]” The use of the word MAY Iindicates that alternative procedures, specifications or criteria are permitteda permission to do something …. 1.3.2 DEFINITIONS Access Service Network (ASN). ASN is defined as a complete set of network functions needed to provide radio access to an AeroMACS subscriber. The ASN provides the following mandatory functions: • AeroMACS Layer-2 (L2) connectivity with AeroMACS MS, © EUROCAE, 20XX 15 • Transfer of AAA messages to AeroMACS subscriber’s Home Network Service Provider (H-NSP) for authentication, authorization and session accounting for subscriber sessions, • Network discovery and selection of the AeroMACS subscriber’s preferred NSP, • Relay functionality for establishing Layer-3 (L3) connectivity with a AeroMACS MS (i.e. IP address allocation) • Radio Resource Management. • In addition to the above mandatory functions, for a portable and mobile environment, an ASN SHALL support the following functions: • ASN anchored mobility, • Paging, • ASN-CSN tunneling. ASN comprises network elements such as one or more Base Station(s), and one ASN Gateway (TBC, e.g. in US there could be more than one single ASN-GW in the ASN). Adaptive modulation. A system’s ability to communicate with another system using multiple burst profiles and a system’s ability to subsequently communicate with multiple systems using different burst profiles. Aerodrome. A defined area on land or water (including any buildings, installations and equipment) intended to be used either wholly or in part for the arrival, departure and surface movement of aircraft. ASN Gateway (ASN-GW). ASN-GW is placed at the edge of ASN and it's the link to the CSN. ASN-GW assists mobility and security in the control plane and handles the IP forwarding. ASN control is handled by ASN-GW and BS. ASN-GW Control plane handles all the radio-independent control and feature set includes authorization, authentication, and accounting (AAA), context management, profile management, service flow authorization, paging, radio resource management, and handover. Data plane feature set includes mapping radio bearer to the IP network, packet inspection, tunnelling, admission control, policing, QoS and data forwarding. ASN-GW has the authenticator and key distributor to implement AAA framework along with AAA relay in order to transmit signals to AAA server wherein the user credentials during network re/entry are verified with EAP authentication. Security context is created during AAA session and keys (MSK and PSK) are generated and shared with BS and MS. AAA module in the ASN-GW provides also flow information for accounting since every single detail about a flow such as transferred or received number of bits, duration, and applied policy is present and directly retrievable from the data plane. ASN-GW is responsible for profile management together with policy function residing in the connectivity network. Profile management identifies the user and its subscribed credentials such as allowed QoS rate, number of flows, type of flows, etc. BS (Base Station). A generalized equipment set providing connectivity, management, and control of the subscriber station (SS). BER (Bit Error Rate). Number of bit errors divided by the total number of transferred bits during a studied time interval measured after error decoder. Burst profile. Set of parameters that describe the uplink (UL) or downlink (DL) transmission properties associated with an interval usage code. Each profile contains © EUROCAE, 20XX 16 parameters such as modulation type, forward error correction (FEC) type, preamble length, guard times, etc. CPDLC. The ATN application Controller Pilot Data Link Communications. Connectivity Service Network (CSN). CSN is defined as a set of network functions that provide IP connectivity services to the AeroMACS subscriber(s). A CSN MAY provide the following functions: • MS IP address and endpoint parameter allocation for user sessions, • Internet access, • AAA proxy or server, • Policy and Admission Control based on user subscription profiles, • ASN-CSN tunneling support, • Inter-CSN tunneling for roaming, • AeroMACS services such as location based services, connectivity for peer-topeer services, provisioning, authorization and/or connectivity to IP multimedia services and facilities to support lawful intercept services. The exact list of AeroMACS services is FFS. CSN MAY comprise network elements such as routers, AAA proxy/servers, user databases. Data transit delay. In accordance with ISO 8348, the average value of the statistical distribution of data delays. This delay represents the subnetwork delay and does not include the connection establishment. Downlink. The transmission direction from the base station (BS) to the subscriber station (SS). FA (Frequency assignment). A logical assignment of downlink (DL) center frequency and channel bandwidth programmed to the base station (BS). HO (Handover). The process in which a mobile station (MS) migrates from the airinterface provided by one base station (BS) to the air-interface provided by another BS. A break-before-make HO is where service with the target BS starts after a disconnection of service with the previous serving BS. Interruption Time: Time between the message indicating the start of the HO (HO_IND) and the message indicating completion of network re-entry (RNG-RSP). During the interruption time the MS is not able to communicate with any BS through a valid Service Flow. Latency. The data latency is defined as the one-way transit time between a packet being available at the IP layer (Tx reference point) in either the MS/ Radio Access Network and the availability of this packet at IP layer (Rx reference point) in the Radio Access Network / MS. © EUROCAE, 20XX 17 FIGURE 1: ILLUSTRATION OF REFERENCE POINTS FOR THE MAXIMUM DATA LATENCY MS (Mobile Station). A station providing connectivity between subscriber equipment and a base station (BS) using the IEEE 802.16-2009 mobile standard. N (Network). The word "network" and its abbreviation "N" in ISO 8348 are replaced by the word "sub-network" and its abbreviation "SN", respectively, whenever they appear in relation to the sub-network layer packet data performance. Network Access Provider (NAP). NAP is a business entity that provides AeroMACS radio access infrastructure to one or more AeroMACS Network Service Providers (NSPs). A NAP implements this infrastructure using one ASN. Network Entry Time. The time from when the SS first attempts to determine the channel to “TXon” (e.g. scanning) until the first network user “PDU” can be sent. Note: It does not include time for self-test or other power up functions. Network Service Provider (NSP). NSP is a business entity that provides IP connectivity and AeroMACS services to AeroMACS subscribers compliant with the Service Level Agreement it establishes with AeroMACS subscribers. To provide these services, an NSP establishes contractual agreements with one or more NAPs. Additionally, an NSP MAY also establish roaming agreements with other NSPs and contractual agreements with third-party application providers (e.g., ASP or ISPs) for providing AeroMACS services to subscribers. From an AeroMACS subscriber standpoint, an NSP MAY be classified as Home NSP (H-NSP) or Visited NSP (V-NSP). Roaming. Roaming is the capability of wireless networks via which a wireless subscriber obtains network services using a “visited network” operator’s coverage area (NSP). At the most basic level, roaming typically requires the ability to reuse authentication credentials provided/provisioned by the home operator in visited networks, successful user/MS authentication by the home operator. PDU. Packet Data Unit. PUSC. Partial Usage Sub-Channelisation. Residual error rate. The ratio of incorrect, lost and duplicate sub-network service data units (SNSDUs) to the total number of SNSDUs that were sent. RF. Radio Frequency. Transaction. One way delivery of an IP layer message.. © EUROCAE, 20XX 18 Transaction expiration time (defined in OSED [11]). AeroMACS SHALL provision the means to, given a maximum time for completing a transaction, start up an alternative procedure to accomplish the transaction. This is related to the continuity parameter. SF (Service flow). A unidirectional flow of media access control layer (MAC) service data units (SDUs) on a connection that is providing a particular quality of service (QoS). SN (Subnetwork). See Network (N). SS (Subscriber Station). A generalized equipment set providing connectivity between subscriber equipment and a base station (BS). SDU(Service data unit). The data unit exchanged between two adjacent protocol layers. On the downward direction, it is the data unit received from the previous higher layer. On the upward direction, it is the data unit sent to the next higher layer. SNSDU(Subnetwork service data unit). An amount of sub-network user data; the identity of which is preserved from one end of a sub-network connection to the other. TDD (Time division duplex). A duplex scheme where uplink (UL) and downlink (DL) transmissions occur at different times but may share the same frequency. Uplink. The direction from a subscriber station (SS) to the base station (BS). REFERENCES[schlereth3] 1.4 [1] EUROCONTROL COCR v2.0, “Communications Operating Concept and Requirements for the Future Radio System” [2] SESAR P15.2.7 Deliverable T1.1A “System Analysis For AeroMACS Use” [3] SESAR P15.2.7 Deliverable T1.1B “AeroMACS System Requirements Document” [4] SESAR P15.2.7 Deliverable T1.4 “AeroMACS Functional Architecture Definition v1.0” [5] SESAR P15.2.7 Deliverable T3.1-T3.3: D3.2 “AeroMACS Profile Definition v00.01.00” [6] SESAR P15.2.7 Deliverable T2.6 “AeroMACS Traffic Modelling” [7] SESAR P15.2.7 Deliverable T2.1 “AeroMACS Channel Modelling” [8] SESAR P15.2.7 Deliverable D2.3 “Compatibility_FSS_AeroMACS” [9] SESAR P15.2.7 Deliverable D3.1 “AeroMACS profile validation v0.2.0” [10] SESAR P15.2.7 Analysis"[schlereth4] Deliverable D4.0 "AeroMACS Deployment & [11] EUROCAE ED78A, “Guidelines for approval of the provision and use of air traffic services supported by data communications” [12] ICAO 9896 “Manual for the ATN using IPS Standards and Protocols” [13] ICAO Annex 14 “Aerodromes”, Fourth Edition July 2004 [14] ICAO “Aerodrome Design Manual” Part 6 Frangibility, First Edition 2006 [15] ICAO “Airport Planning Manual” Part 1 Master Planning, Second Edition 1987 [16] ICAO “EUR Frequency Management Manual” EUR Doc 11, Edition 2010 [17] Integration “Procedimiento Interno para Tramitación y Coordinación de Informes por Servidumbres Aeronaúticas” AENA, 2010 © EUROCAE, 20XX 19 [18] “C-Band Airport Surface Communications System Standards and Development” Phase II Final Report, Volume 1: Concepts of Use, Initial System Requirements, Architecture, and AeroMACS Design Considerations, NASA, 2011 [19] SJU 15.2.7 D01-T1.5, Spectrum investigations, Ed. 1.0. [20] IRIG 106, DOCUMENT 106-11 PART I: TELEMETRY STANDARDS, (APRIL 2011) [21] ITU, 2nd Session of the Conference Preparatory Meeting (CPM) for WRC-12, 12-25 February 2011. [22] WMF-T32-002-R010v04-Stage2 “Network Architecture: Architecture tenets, Reference Model and Reference Points” [23] WMF-T33-001-R010v05-Stage3_”Network Procedures” Architecture: Detailed Protocols [24] WMF-T33-003-R010v4-Stage3 “R6 R8 ASN Anchored Mobility Scenarios” [25] SESAR P15.2.7 WA08 Deliverable D08 AeroMACS Safety and Security Analysis [26] SANDRA_R6.2.2: Report on Modeling and Performance Simulations (in work). [27] ICAO “Aerodrome Design Manual” Part 1 Runways, Third Edition 2006 [28] AOC Datalink Dimensioning Executive Summary, SESAR. [29] ICAO PANS-OPS 8168 [30] NWG-T25-003-R010v07-IOT, “Mobile interoperability test” and [31] WMF-T32-002-R010v04-Stage2 “Network Architecture: Architecture tenets, Reference Model and Reference Points” [32] WMF-T33-001-R010v05-Stage3_”Network Procedures” [33] [34] Architecture: Detailed Protocols SANDRA Project, http://www.sandra.aero SANDRA WP6.2.3 Technical Document on PHY Layer Performance V0.2, 23/09/2010, Draft [35] SANDRA Project, DLR, “PHY_Results_v4.xls” [36] SANDRA WP6.2.4 “Discussion paper on MAC simulations”, September 2011 [37] WiMAX Forum Application Working Group “The WiMAX Forum System Level Simulator NS-2”, Release 2.6, March 2009. [38] RFC 791 – “Internet Protocol” (September 1981) [39] IEEE802.16-2009, “Part 16: Air Interface for Broadband Wireless Access Systems” [40] [41] and EUROCAE ED-228: Safety and Performance Standard for Baseline 2 ATS Data Communications (Baseline 2 SPR Standard) AOC Datalink dimensioning study, Edition 01.00.00, Ed date Nov 16th, 2010. [42] SESAR P9.16 Deliverable D03 AeroMACS Airborne System Requirements and Architecture Dossier [43] ICAO – Aeronautical Communications Panel (ACP) – WG-S, third meeting, WP-06: MSS Interference Analysis for AeroMACS, July 2013. [44] http://openflights.org/data.html [45] http://aspmhelp.faa.gov/index.php/OEP_35 [46] http://en.wikipedia.org/wiki/List_of_the_busiest_airports_in_Europe [47] SANDRA D3.5.5 NAMING AND ADDRESSING, v1.0, June 2011 [48] ICAO ACP WG-S/3 WP11 White paper on AeroMACS deployment scenarios and derived requirements, v3.1, October 2013 © EUROCAE, 20XX 20 [49] [50] SANDRA D3.2.1 CONSOLIDATED SANDRA NETWORK AND INTEROPERABILITY ARCHITECTURE, v2.0, March 2012 SANDRA D6.2.1[schlereth5] [51] EUROCAE ED-222: AERONAUTICAL MOBILE AIRPORT COMMUNICATIONS SYSTEM (AeroMACS) PROFILE, November 2013 [52] ETSI EN 303 214 v1.2.1 DLS System; Community Specification for application under the Single European Sky Interoperability Regulation EC 552/2004; Requirements for ground constituents and system testing, April 2012 [53] RFC 2460 – “Internet Protocol, Version 6 (IPv6) Specification” (December 1998) [54] WMF-T32-001-R016v01-Stage 2[schlereth6] [55] RFC 3315 – “Dynamic Host Configuration Protocol for IPv6 (DHCPv6)” (July 2003) [56] RFC 4862 – “IPv6 Stateless Address Autoconfiguration” (September 2007) [57] AeroMACS PICS , WiMAX Forum: WMF-T24-003-R010-v01 [58] ETSI TS 102 624-2 v1.3.6 Conformance Testing for the Network Layer of HiperMAN/WiMAX terinal devices; Part 2: Test Suite Structure and Test Purposes (TSS&TP), September 2010 [59] EUROCAE ED-153: GUIDELINES FOR ANS SOFTWARE SAFETY ASSURANCE, August 2009 © EUROCAE, 20XX 21 CHAPTER 2 2.1 2.1.1 OVERALL SYSTEM DESCRIPTION Network Reference Model Overview The Network Reference Model (NRM) is a logical representation of the network architecture. The NRM identifies functional entities and reference points over which interoperability is achieved between functional entities. Each of the entities, MS, ASN and CSN represent a grouping of functional entities. Each of these functions MAY be realized in a single physical functional entity or MAY be distributed over multiple physical functional entities. While the grouping and distribution of functions into physical devices within the ASN is an implementation choice, the AeroMACS Architecture specification defines one ASN interoperability profile. The intent of the NRM is to allow multiple implementation options for a given functional entity, and yet achieve interoperability among different realizations of functional entities. Interoperability is based on the definition of communication protocols and data plane treatment between functional entities to achieve an overall end-to-end function, for example, security or mobility management. Thus, the functional entities on either side of RP (Reference Point) represent a collection of control and Bearer Plane endpoints. In this setting, interoperability will be verified based only on protocols exposed across an RP, which would depend on the end-to-end function or capability realized (based on the usage scenarios supported by the overall network). The NRM specifies the normative use of protocols over an RP for such a supported capability. If an implementation claims support for the capability and exposes the RP, then the implementation SHALL comply with this specification. This avoids the situation where a protocol entity can reside on either side of an RP or the replication of identical procedures across multiple RPs for a given capability. © EUROCAE, 20XX 22 FIGURE 2: NETWORK REFERENCE MODEL 2.1.2 Reference Points Figure 2Figure 2 introduces several interoperability reference points. A Reference Point (RP) represents a conceptual link that connects different functions of different functional entities. RPs are not necessarily a physical interface. These functions expose various protocols associated with an RP. All protocols associated with a RP MAY not always terminate in the same functional entity i.e., two protocols associated with a RP SHALL be able to originate and terminate in different functional entities. The normative reference points between the major functional entities are in the following subsections. 2.1.2.1 Reference Point R1 Reference Point R1 consists of the protocols and procedures between MS and BS as part of the ASN per the air interface (PHY and MAC) specifications (see also ASN reference model outlined in section 2.1.3). Reference point R1 MAY include additional protocols related to the management plane. 2.1.2.2 Reference Point R2 Reference Point R2 consists of protocols and procedures between the MS and CSN associated with Authentication, Services Authorization and IP Host Configuration management. This reference point is logical in that it does not reflect a direct protocol interface between MS and CSN. The authentication part of reference point R2 runs between the MS and the CSN operated by the home NSP, however the ASN and CSN operated by the visited NSP MAY partially process the aforementioned procedures and mechanisms. Reference Point R2 might support IP Host Configuration Management running between the MS and the CSN (operated by either the home NSP or the visited NSP). 2.1.2.3 Reference Point R3 Reference Point R3 consists of the set of Control Plane protocols between the ASN and the CSN to support AAA, policy enforcement and mobility management capabilities. It also encompasses the Bearer Plane methods (e.g., tunneling) to transfer user data between the ASN and the CSN. Some of the protocols foreseen on this RP are RADIUS and DHCP. 2.1.2.4 Reference Point R4 Reference Point R4 consists of the set of Control and Bearer Plane protocols originating/terminating in various functional entities of an ASN that coordinate MS mobility between ASNs and ASN-GWs. R4 is the only interoperable RP between similar or heterogeneous ASNs. 2.1.2.5 Reference Point R5 Reference Point R5 consists of the set of Control Plane and Bearer Plane protocols for internetworking between the CSN operated by the home NSP and that operated by a visited NSP. 2.1.3 ASN Reference Model The ASN defines a logical boundary and represents a convenient way to describe aggregation of functional entities and corresponding message flows associated with the access services. The ASN represents a boundary for functional interoperability with AeroMACS clients, AeroMACS connectivity service functions and aggregation of functions embodied by different vendors. Mapping of functional entities to logical entities within ASNs as depicted in the NRM is informational. 2.1.3.1 ASN Decomposition The ASN reference model is illustrated in Figure 3Figure 3. An ASN shares R1 reference point (RP) with an MS, R3 RP with a CSN and R4 RP with another ASN. © EUROCAE, 20XX 23 The ASN consists of at least one instance of a Base Stations (BS) and at least one instance of an ASN Gateway (ASN-GW). A BS is logically connected to one or more ASN Gateways. The R4 reference point is the only RP for Control and Bearer Planes for interoperability between similar or heterogeneous ASNs. Interoperability between any types of ASNs is feasible with the specified protocols and primitives exposed across R1, R3 and R4 Reference Points. When ASN is composed of n ASN-GWs (where n > 1), Intra ASN mobility MAY involve R4 control messages and Bearer Plane establishment. For all applicable protocols and procedures, the Intra-ASN reference point R4 SHALL be fully compatible with the Inter-ASN equivalent. FIGURE 3: ASN REFERENCE MODEL 2.1.3.2 BS Definition The AeroMACS Base Station (BS) is a logical entity that embodies a full instance of the MAC and PHY in compliance with the AeroMACS Specifications and MAY host one or more access functions. A BS instance represents one sector with one frequency assignment. It incorporates scheduler functions for uplink and downlink resources, which will be left for vendor implementation and are outside the scope of this document. Connectivity (i.e., reachability) of a single BS to more than one ASNGW MAY be required as a redundancy option. 2.1.3.3 ASN Gateway Definition The ASN Gateway (ASN-GW) is a logical entity that represents an aggregation of Control Plane functional entities that are either paired with a corresponding function in the ASN (e.g. BS instance), a resident function in the CSN or a function in another ASN. The ASN-GW MAY also perform Bearer Plane routing or bridging function. ASN-GW implementation MAY include redundancy and load-balancing based on radio parameters among several ASN-GWs (TBC). ASN-GW implementation SHALL include load-balancing based on SLA requirements of the MSs. The implementation details are out of scope for this document. For every MS, a BS is associated with exactly one default ASN GW. © EUROCAE, 20XX 24 2.1.4 2.1.4.1 ASN Reference Points Reference Point R6 Reference point R6 consists of the set of control and Bearer Plane protocols for communication between the BS and the ASN-GW. The Bearer Plane consists of intraASN data path between the BS and ASN-GW. The Control Plane includes protocols for data path establishment, modification, and release control in accordance with the MS mobility events. R6 also serves as conduit for exchange of MAC states information between neighbouring BSs except when protocols and primitives over R8 are defined.. The main protocol used in this interface is an IP-in-IP tunnelling protocol, named GRE (Generic Encapsulation Protocol). This leads to the forwarding and transport of Ethernet packets coming from the ASN to CSN. Another mean to achieve that is the end-to-end VLAN service. 2.1.4.2 Reference Point R8 Reference Point R8 is not used in real implementation therefore out of scope. In the following some particular internetworking relationships will be described between ASN and CSN for • Sharing an ASN by multiple CSN, • Providing service to roaming MS. These examples are described in detail in section 3.4.2. 2.1.5 2.1.5.1 AeroMACS Network Architecture Interoperability Scope Reference Points Supported capabilities across reference points R1– R5 (based on usage scenarios), and the normative definition of interoperable protocols/procedures for each supported capability is within the scope of AeroMACS Network Architecture specification. Control Plane definition message flows and Bearer Plane data flows for interoperable R6 are within the normative scope of the AeroMACS Network Architecture specification. 2.1.5.2 ASN Functions The normative definition of protocols, messages, and procedures to support ASN functions and capabilities, independent of specific grouping of these capabilities into physical realizations, is within the scope of AeroMACS Network Architecture specification. The functional decomposition is the preferred methodology of AeroMACS Network Architecture without specific reference to any logical or physical network entities. Additionally, only one ASN Profile has been defined in scope of AeroMACS Network Architecture. 2.1.6 CSN Reference Model CSN internal reference points are out of scope of this specification. 2.1.7 AeroMACS ASN Profile A profile maps ASN functions into BS and ASN-GW so that protocols and messages over the exposed reference point are identified. The following text describes the three WMF profiles of an ASN based on the current Stage 2 specifications. These three profiles show three possible implementations of the ASN and do not necessarily mandate a vendor to support all three. If a vendor chooses to implement any given profile, then that vendor’s implementation SHALL conform to the chosen profile as specified in this text. The depiction of a function on either the ASN GW or the BS in the figures below does not imply that the function exists in all manifestations of this profile. Instead, it indicates that if the function existed in a manifestation it would reside on the entity shown. Identification of the ASN profiles was done for the specific goal of providing a bound framework for interoperability among entities inside an ASN. 2.1.7.1 Profile A ASN functions are mapped into ASN-GW and BS as shown in Figure 4Figure 4. Some of the key attributes of Profile A are: © EUROCAE, 20XX 25 • HO Control is in the ASN GW. • RRC is in ASN GW that allows RRM among multiple BSs. • ASN Anchored mobility among BSs SHALL be achieved by utilizing R6 and R4 physical connections. • FIGURE 4: WMF ASN PROFILE A For more details refer to [22]. 2.1.7.2 Profile B Profile B ASNs are characterized by unexposed intra-ASN interfaces and hence intraASN interoperability is not specified. However, Profile B ASNs shall be capable of interoperating with other ASNs of any profile type via R3 and R4 reference points. Inter-ASN anchored mobility SHALL be possible via R4. © EUROCAE, 20XX 26 FIGURE 5: WMF ASN PROFILE B For more details refer to [22]. 2.1.7.3 Profile C According to Profile C, ASN functions are mapped into ASN-GW and BS as shown in Figure 6Figure 6. Key attributes of Profile C are: • HO Control is in the Base Station. • RRC is in the BS that would allow RRM within the BS. An “RRC Relay” is in the ASN GW, to relay the RRM messages sent from BS to BS via R6. • As in Profile A, ASN Anchored mobility among BSs SHALL be achieved by utilizing R6 and R4 physical connections. © EUROCAE, 20XX 27 • FIGURE 6: WMF ASN PROFILE C For more details refer to [22]. 2.1.8 AeroMACS ASN Profile Choice AeroMACS ASN Profile SHALL support profile C. © EUROCAE, 20XX 28 CHAPTER 3 AEROMACS NETWORK ARCHITECTURE This chapter describes the functional component organization and operation principles of AeroMACS networks. The chapter is organized as follows: first, functional requirements affecting network design and service provision are listed. Second, the main functional entities are specified together with generic operation protocols, for a generic concrete network topology. Then, an example of airport network infrastructure is described as a guidance to find deployment options and points of attachment in the case of an AeroMACS network rollout. Finally, deployment models are proposed where AeroMACS network architecture leaves open aspects, namely: NSP & NAP deployment, airborne architecture and roaming scenarios. 3.1 Functional requirements The scope of this section is to address general requirements related to the access and connectivity network that have impact on an AeroMACS deployment. It deals with elements from the standardized architecture engaged to the AeroMACS deployment and integration with the overall airport system, which are out of the scope of the radio data link specification. 3.1.1 Access Service Network (ASN) requirements AeroMACS surface data link SHALL operate independently to other access network technology on the backbone or ground side. AeroMACS architecture SHALL NOT preclude inter-technology HOs. AeroMACS convergence sublayer SHALL support IPv4 CS and IPv6 CS and MAY support ETH_CS. AeroMACS SHALL route the inbound and outbound IP packets to/from the backbone network according to any of the following matching rules available: Protocol field, IP Masked Source Address parameter, IP Masked Destination Address parameter, Protocol Source Port Range field, Protocol Destination Port Range field, IEEE 802.1Q VLAN ID field, IP Type of Service (DS bytes), and others. AeroMACS architecture SHALL give the means to mitigate security risk propagation from vulnerable AeroMACS ASN elements (mainly ASN-Gateway) to the backbone of the Communication infrastructure. In order to support authentication AeroMACS SHALL support the Public Key Infrastructure utilizing X.509 certificates. In order to give support to subscriber authentication, proper means SHALL be foreseen. Thus, MS and AAA server SHALL support EAP-TLS framework. 3.1.2 Core Service Network (CSN) requirements AeroMACS SHALL be based on an all IP radio and ground Internet Protocol (IP) compliant infrastructure as defined in ICAO DOC 9896. AeroMACS infrastructure SHALL support different network addressing schemes in order to give support to network addressing for vehicles and home and visiting aircraft without distinction. Mobile IP SHALL be implemented in compliance with ICAO standard for communication with Aircraft. AeroMACS SHALL support IPv6. AeroMACS SHALL support IPv4 address in order to be interoperable with legacy systems and for vehicles on the airport domain. A MS SHALL get a dynamic IP address. The vehicles which have been allocated the same address SHALL not operate on the same aerodrome. AeroMACS SHALL support multiple NSPs for provisioning ATC/AOC services over the same data link. AeroMACS infrastructure SHALL provide the capability to the subscriber to select the preferred CSN/NSP. © EUROCAE, 20XX 29 ASN-GW SHALL support GRE tunnelling on R6 interface. ASN routers SHALL support dual network layer stack, tunneling or protocol conversion, as specified in ICAO Doc 9896, for connecting IPv6 core networks to AeroMACS ASN network which may go over IPv4 stack. MSs SHALL support UDP/TCP transport connections. 3.1.3 Service Provision Requirements The network infrastructure SHALL enable provision of ATC services to all equipped aircraft. The network infrastructure SHALL enable provision of AOC services to equipped aircraft The network infrastructure SHALL enable provision of airport operation related services (communication with the surface vehicles). All NAP and NSP SHOULD be able to support ATC service provision to all aircraft independently from their AOC/AAC contracts. For instance, airlines that do not subscribe any AOC/AAC contract over AeroMACS SHOULD be accepted on NAP and NSP networks for ATC only service provision, and proper authentication procedures SHOULD be supported to enable authorization of such services by the ATC service provider to any aircraft that has been authenticated in the Home NSP. All ground networks SHALL advertise to the mobile subscribers the types of service it can provide: ATC, AOC and airport operation. This information SHOULD be updated depending on real-time status of connectivity. All NAP and NSP SHALL have the same authentication mechanism and logon process for aircraft. 3.2 Functional architecture The Network Reference Model (NRM) addressed in section 2.1, based on WiMAX Forum NWG documentation [23], depicts the normative use of protocols, interfaces (commonly named reference points) and functional entities, and is valid to support the integration of AeroMACS datalink within the backbone and give the corresponding service support. The overall principles followed to specify AeroMACS functional architecture are: Functional decomposition: The proposed architecture allows that required features are decomposed into functional entities. The reference points are means to provide multivendor interoperability. AeroMACS BS multivendor interoperability will be described in section 10.110.1. Modularity and flexibility: The modularity of the architecture proposed gives means to adapt it to different AeroMACS deployments and the interconnection to the ground infrastructure. As an example, the interconnection of different CSN topologies with just one single access network is permitted. The architecture also eases the scalability of the network in case after initial deployment the number of BSs installed within the airport needs to be increased in order to support more users. Decoupling the access and connectivity services: This architecture enables full mobility with end-to-end QoS and security support making the IP connectivity network independent from AeroMACS radio specification and full PHY/MAC standard. In consequence, this allows for unbundling of access infrastructure from IP connectivity services. Support to a variety of business models: AeroMACS architecture supports the sharing of different aviation business models. The architecture allows a logical separation between the network access provider (NAP), the entity that owns and/or operates the access network, the network service provider (NSP) and the application service providers (ASP). The reference points can represent a set of protocols to give control and provide management support on the bearer plane. On an overall hypothetic deployment, functional entities here depicted could be matched to more than one physical device. In a similar manner, most of the reference points are left open. The architecture does not preclude different vendor implementations based on different decompositions or © EUROCAE, 20XX 30 combinations of functional entities as long as the exposed interfaces comply with the procedures and protocols specified by WiMAX Forum NWG for the relevant reference points. For interoperability purposes, special care should be paid to the reference points R1 and R6 of the ASN reference model. Regarding the AeroMACS business model, it is expected to have just one single ASN-GW deployed in the airport domain. Intra ASN mobility will imply full support of R6 control messages. 3.2.1 Business entities (NAP, V-NSP, H-NSP) Aviation business model and hence contractual agreements between parties can have an impact on the network topology that supports AeroMACS service provision. Figure 7 depicts the overall contractual case and entities involved on behalf of provisioning services to the subscribers. AeroMACS architecture supports the discovery and selection of one or more accessible NSPs by a subscriber. Figure 7: Overall relations between AeroMACS business entities [10] The NAP is the entity that owns and operates the access network providing the radio access infrastructure to one or more NSPs. Correspondingly; the NSP is the entity that owns the subscriber and provides it with IP connectivity and services by using the ASN infrastructure provided by one or more NAPs. A NSP can be attributed as home or visited from the subscriber’s point of view. A home NSP maintains service level agreements (SLA), authenticates, authorizes, and charges subscribers. A home NSP may settle roaming agreements with other NSPs, which are called visited NSPs and are responsible to provide some or all subscribed services to the roaming users. Within the aeronautical environment, the following actors could make use of AeroMACS business entities: • ANSP • Airport telco operator • Airline • ACSP (Aeronautical Communication Service Provider), e.g. AVICOM, SITA, ARINC, ADCC • New/other global CSP (Communication - Mobility Service Providers) A summary of NAP/V-NSP/H-NSP services and possible actors is depicted in the Table 1 below. It is assumed that aircraft mobility will be managed by a central Mobility Service Provider (ACSP or CSP) (ARINC, SITA, others) (=aircraft H-NSP). © EUROCAE, 20XX 31 Table 1: Possible actors for NAP/V-NSP/H-NSP functions 3.2.2 Airport telco operator ANSP ACSP NAP x x x V-NSP x x x H-NSP x (for vehicles) x CSP Airline x x Network entities A foreseeable layout of the AeroMACS network entities is depicted in Figure 8. The functional network entities described here are: Mobile Subscriber (MS), Base Station (BS), ASN Gateway (ASN-GW, comprising DHCP relay, AAA client and FA functions), AAA proxy/server, Home Agent (HA), airborne router (AR) and end systems. Figure 8 presents an example of high level functional architecture to support communication with ground vehicles (airport operation) and aircraft (ATC, AOC). In such a case, at the airport, in addition to AeroMACS specific systems (base stations and ASN gateway) AAA server and DHCP server need to be deployed to enable communication with airport vehicles. The airport operator network would thus act as home network for airport vehicles. For ATC and AOC service provision, the airport network would act as visited network, the home network being implemented at regional or global scale for aircraft. The Airport AAA server would thus act as AAA proxy for aircraft relaying authentication and authorization request from the ASN gateway to the Mobility Service Provider (MSP). The MSP is the administrative authority that may operate one or more Home Agents (HA) [12]. Regarding IP connectivity, it is possible that IP addresses will be assigned directly by an HNSP entity such as the AAA server or a global DHCP. However, the most likely case is that an IP address will be assigned locally to the MS and, in the case of an aircraft with a permanent home address, it will be announced to the network. The ASN gateway would also relay DHCP request to the Aircraft Home network DHCP server. For global connectivity and mobility support, the ASN will rely on a HA operated by an MSP. © EUROCAE, 20XX 32 Figure 8: AeroMACS network entities As previously stated, WiMAX Forum NWG has depicted the overall architecture that could support AeroMACS ASN [22]. However, it remains very generic. The open issues not addressed in the literature related to the functional role of required network entities in the aeronautical service network are addressed below. Mobile Station (MS) and Base Station (BS) The MS and BS are specific AeroMACS entities that manage the user and control planes of the physical and medium access layers of the subscriber node and the access network, respectively. Their functions are fully described by IEEE 802.16-2009 standard [39]. End system Corresponding to IPS host as defined in ICAO 9896 [12], it is the node to which IP packets are explicitly addressed, and acts as an application data origin or destination for its respective domain (ATS or AOC). On-board end systems communicate with end systems on the ground. On-board end systems are directly or indirectly connected to the airborne router (usually running as an application client) or lay in the ground network to which an ASN-GW provides a data path (usually running as an application server). Airborne router (AR) The airborne router contains the on-board routing function. The AR is in charge of route discovery, signalling and policy-based routing configuration. It can support multihoming, in which case it can send and receive packets over different radio interfaces © EUROCAE, 20XX 33 and access networks including AeroMACS. Refer to section 3.5 for the different airborne configuration options. The AR may also support mobility management functions if performing as a Mobile Router for the on-board end systems applications, as envisaged in [12]. ASN Gateway The main actor on the network topology is the ASN Gateway (ASN-GW), on which rely most of the management and control procedures to support the data link and its interconnection with the backbone. Moreover, the ASN-GW deals with interoperability between AeroMACS manufacturers as well. Figure 9 summarizes the functions attributable to the ASN-GW. One single ASN-GW is expected to be deployed per airport domain. As depicted, main interfaces for the ASN-GW are R6 which connects it to the BSs and R3 which deals with the interconnection to the CSN. Figure 9: Main Functionalities of AeroMACS ASN-GW [10] According to AeroMACS Network Architecture Reference Model specified in [4], a generic ASN-GW covers the features/functionalities here drawn. • AeroMACS layer 2 (L2) connectivity with MS. • Relay functionality for establishing IP connectivity between the MS and the CSN. • Network discovery and selection of the AeroMACS subscriber’s preferred NSP. • Subscriber IP address allocation by querying the DHCP server for network establishment and DHCP DISCOVER messages forwarding. • IP forwarding to/from the backhaul via MIP Foreign Agent (FA). In case of supporting IPv6, the ASN-GW SHALL implement an Access Router (AR) functionality. Note that this is a CSN function and does not necessarily have to be part of the ASN-GW functions, in which case it may deviate from the reference WiMAX Forum Profile C configuration. • Several options for the location of the FA/AR are envisaged, namely: © EUROCAE, 20XX 34 a) physically inside the ASN-GW equipment (as in Profile C) and dedicated to mobility functions only for the MSs in the ASN, b) as a separate entity in the local airport network and dedicated to mobility functions only for the MSs in the ASN, c) as a separate entity in the local airport network and able to mobility functions for any node in the local network, including one or more AeroMACS ASN and other IP end nodes. The FA/AR will not, in any case, operate to provide IP connectivity and mobility functions to other data links other than AeroMACS. • Connection Admission Control to ensure service quality and different grades of service commitment and provision. • AAA proxy/client. AeroMACS ASN-GW SHALL trigger the exchange of susceptible subscriber information and transfer AAA messages of AeroMACS subscriber’s Visited NSP for authentication, authorization and accounting to the Home NSP. • Context management. Transfer of subscriber credentials (it can store user’s profiles or just cache them). Consequently, key distribution between entities. • User profile management. After the authorization phase and key exchange, the user profile is handled in order to create corresponding SFs. • Data Path establishment and Service Flow Authorization (SFA), CID mapping for control messages. GRE tunnelling SHALL be set to the BSs. ASN-GW creates one data path per SF. Every SF has each different GRE key value. • Mobility management and handover control. Some of the most commonly functions that can be found on a COTS ASN-GW have no applicability for AeroMACS. These are listed below: • Radio Resource Management (RRM) is left optional and therefore opened to specific implementations in the future. • No paging needed as stated in the profile [51] • No load balancing policy. • No Multicast/Broadcast Control Module (MBS). • Location registration. This is left open to AeroMACS deployments and future implementations. An issue to address is how incoming IP packets to AeroMACS from the backbone are managed. IP packets coming from ATS applications SHALL make use of the IP header field “DSCP” whether they are IPv4 or IPv6 packets (in case of IPv4, it matches with the “ToS” field of the header. On the other hand, IPv6 packets have the DSCP value within the “Traffic Class” field of the header.). Either ASN-GW or the Access Router SHALL not drop IP packets with a DSCP field distinct from zero. In contrast they SHALL be queued in case of congestion and accordingly to the different priorities (RFC 4594 gives a recommendation on service categorization). This entity will then read the IP header, maps it to an AeroMACS MAC QoS class and through means of GRE tunneling, convey that packet to the specific BS to which the MS is attached. AAA proxy/server One of the main roles of AAA server is gathering the information of all AeroMACS users. The CSN of the home NSP SHALL distribute the subscriber’s profile to the NAP directly or via the visited NSP. While local users (handling vehicles) will be managed by a local airport AAA server via the ASN-GW, the most foreseeable scenario is one AAA proxy from the airport operator that sends queries and requests to a global database with all the aircraft operated by the H-NSP that will manage airborne user authentication and policy function (PF). AAA proxy covers the following functionalities: • Support roaming when required in case MS connects to V-NSP • Simplifies connection to several CSN • Security capability allows for logging in of MS locally (e.g. by an ANSP) © EUROCAE, 20XX 35 DHCP server In the same line, we would find the DHCP server in the CSN operated by the Visited or Home NSP. IP address assignment will be done after the MS has performed full network entry. The IP address allocated to an MS may be public or private, and may either be a point-of-attachment IP address or an inner-tunnel IP address, according to WiMAX Forum specification [22]. For the basic-connectivity IP service, the IP address is assigned by the CSN. For IP services accessible over an inner-tunnel, the network that terminates the tunnel allocates the IP addresses. Finally the IP allocation for surface vehicles can be done through a local IP pool in order to give dynamically IPs to them. IP mobility It is foreseen that global IPv6 addresses will be assigned to specific aircraft or onboard data link equipment such as AeroMACS. This can be done via static IPs or dynamically via Mobile IP mechanisms. The support of dynamic IP allocation (DHCP) and roaming for aircraft needs the support of global IP mobility and contractual agreements between NSPs or NAPs in order to allow the global identification and operation of airborne devices. Subscriber and HA SHALL implement Mobile IPv6 as specified in ICAO Doc 9896 [12]. A Home Agent (HA) SHALL be required at the home network. A secure communication path (e.g. private network tunnel) between ASNGW to the NSP HA SHALL be required. In the visited network, Foreign Agent (FA) or Access Router (AR[schlereth7]) stores information of aircraft visiting the network, gives a local IP to the visiting aircrafts and advertises the so called “care of address” to the HA in order to allow re-routing of AeroMACS datagrams addressed to the MS in the Access Network where it is currently attached. The redirection of an incoming packet to the home network from the visited network where the aircraft is currently in is done through a tunnel established between HA and FA or AR. To complete the support of a moving aircraft into a visited ASN, the MSs SHALL integrate a MIP client. MIP suffers from several drawbacks. The main concern would be the big delay that tunnelling between HA and FA/AR introduces. Especially sensitive applications, such as real time ones, would be affected by this. See “Deployment Models” section for suggested solutions to optimize routes in a MIP architecture. HA location could vary in a real scenario and can be centralized or decentralized. On the opposite, AAA is expected to act as a proxy only in the V-NSP. This foreseeable scenario is depicted in Figure 10. © EUROCAE, 20XX 36 Figure 10: AeroMACS AAA and HA Deployment Scenario AAA framework By default, the IETF RADIUS protocol is supported as the main protocol for AAA purposes. This is an application level protocol, client/server specifically. Therefore, ASN-GW SHOULD support and implement a client RADIUS. BSs are not end-points in RADIUS and therefore are not implementing the RADIUS protocol. PKMv2 will rely on the fact that in AeroMACS user (subscriber) authentication is required. EAP-TLS framework is the defined suite to give support to user authentication. The aircraft router will use X509 certificates for EAP-TLS authentication, using as C/N realm possibly the airline name (as network domains are currently defined by ICAO), or any PKI provider name. The H-NSP AAA server will receive authentication traffic with username realm possibly being the airline – this means that the airport Proxy AAA will need to map the realm value with the H-NSP AAA address. Basic and primary connections, which carry management messages, do not cipher, nor authenticate messages. Transport connections can be handled independently and be assigned security associations (SA). SA associates key material and connection, i.e. every CID is mapped to a SAID if it supports security. Every MS must be able to support at least 2 transport SAs according to WiMAX Forum. SAID is updated in the MS by the target BS during handover. Every MS establishes a primary SA with the BS. The rest of SAs are static as they are provisioned by the BS. If a pair BS/MS has no authorization policy, there is no related SA. From the Access Service Network side, the ASN-GW acts as the end-point of the authentication communication flow. In case the ASN-GW hosts the user data base, it plays the role of the AeroMACS authenticator. In the case it doesn’t, it works as a relay, as a AAA client that forwards queries to the AAA server or the user data base. As previously said ASN-GW makes use of RADIUS protocol to support EAP for either user authentication or service authorization. AAA server is also in charge of checking the QoS policy for a given MS and consequently creating a Service Flow Authorization (SFA) as a response to a service flow initiation request from the MS. © EUROCAE, 20XX 37 AAA servers will depend on the core network managed by the service provider. Data bases could belong to the Visited Network of each airport; they could belong to the same virtual segment of network as AeroMACS or be held remotely in a different facility of the operator and therefore in another network (namely, the Home Network). IPsec support for the transport of all connections is envisaged. Moreover, the use of VPN tunnelling is encouraged to secure all the connections to the remote elements of the backbone of the network. 3.2.3 Addressing concept According to ICAO Doc 9896, mobile and fixed nodes SHOULD make use of IPv6 address structure when communicating over the ATN/IPS [12]. Each ATN/IPS Administrative Domain will require developing an IPv6 addressing plan with a unique address prefix. It is also assumed that local airport users communicate over the ATN network. A standard prefix convention is proposed by SANDRA study [33]: the convention is ICAO and airline dependent and is Provider Independent. The global routing prefix is designed to be structured hierarchically by the aeronautical organization in Provider Independent address block case. The subnet field is designed to be structured hierarchically by site administrators. There are several proposals of an IPv6 address format for ATN/IPS nodes (refer to [47] for more details). The currently recommended format (as approved by ICAO ACP WG-I #7) is based on the work performed by NEWSKY, and only applies to airborne sites. Mobility Service Providers (ACSPs, ANSPs, airlines, airport authorities, organizations, etc.) are allocated a /32 to be used for airborne site allocation. Beyond this 32 bit boundary, ICAO recommends the IPv6 address format for airborne sites shown in Figure 11. Figure 11: ICAO WG-I #7 recommended format SANDRA draft proposal [47] is the most advanced solution as of today and builds over the ICAO recommended format and NEWSKY proposals. SANDRA address structure applies to both ground and airborne sites and assumes a smaller Global ICAO prefix of /22 which looks as indicated in Figure 12. It covers safety related applications (ATS, AOC) and non-safety applications (AAC, APC).This overall address block is split into two subspaces (50-50 split) for each safety and non-safety related services. These sub-spaces are then split, based on a 50-50 ratio, into ground and airborne address subspaces. © EUROCAE, 20XX 38 Figure 12: Illustration of SANDRA addressing concept[schlereth8]. In the airborne address structure, operator field allows for discrimination by organization/airline: providers will advertise airlines and not aircraft. This provides aggregation and therefore reduces the size of the routing tables. It is possible to have multiple service providers for the same aircraft or airline. On the ground network structure, a sufficiently large number of supported organizations is possible. Aggregation is even on the level of ICAO regions and large service providers. For safety issues, it is highly recommended to ensure segregation between vehicle and aircraft subscribers through the use of different IP ranges in the airport network. This allows the distinction between both types of user by the network and guarantees the possibility to apply different authentication policies. The specific use of IP ranges in an airport network is implementation dependent. 3.2.4 Network entry and NAP/NSP selection Several considerations on the NAP and NSP selection by the MS are given in this section, based on the permitted profile items, WiMAX Forum specifications and deployment models from [48]. Manual or automatic selection is left as an open issue. Overview of network entry An aircraft MS network entry process is as follows: During the scanning process the aircraft needs to be able to determine if it is on a channel of a NAP providing aircraft communication services • If the NAP is providing aircraft communication services, the aircraft can either check that its H-NSP is connected or decide to authenticate directly © EUROCAE, 20XX 39 • If the authentication is successful, it means that the NAP/V-NSP is able to contact the H-NSP. • Then the MS can perform NET entry and be allocated a CoA (Care Of Address). • MS establishes MIP tunnel to H-NSP Home Agent • MS can then be contacted using its Home IP address through the Home Agent at H-NSP In the case of an airport handling vehicle, the node is attached to the local network, and thus the network entry process is largely simplified: • During the scanning process the device needs to be able to determine if it is on a channel of a NAP providing airport services. • The H-NSP is based locally so the device can perform authentication directly. • If authentication is successful, the MS performs NET entry and the H-NSP grants the device a local IP address. Overview of WiMAX Forum description AeroMACS profile allows two discovery procedures: A) NAP discovery gives means to the MS, after scanning and decoding the “operator ID” element for DL_MAP, to select which BS of a particular operator to connect. This is a very unlikely scenario since the deployment of different AeroMACS access networks will lead to increase the interference to non-AeroMACS systems. B) NSP discovery is mandatory in the profile. The MS will dynamically discover all NSPs in the airport during the Network entry procedure. In order to accomplish that, the MS will be listening to the broadcast message with the NSP IDs sent by the BSs (SII-ADV MAC message advertisement). Previously it SHOULD have a list of NSPs loaded in its configuration. Please refer to section 4.1 of [32] for a detailed description of NET entry discovery and selection. The most significant 24 bits (MSB 24 bits) of the “Base Station ID” SHALL be used as Operator ID, which is the NAP Identifier. NAP discovery is based on the procedures defined in IEEE 802.16 standard [39] and out of the scope of this specification. Operator ID/NAP ID allocation and administration method are managed by IEEE Registration authority, which defines the range for global IDs assigned by IEEE and the range for MCC/MNC IDs which can also be used. The field formatting is defined in IEEE 802.16 standard. In the NAP+NSP deployment case where there is only one NSP associated with the NAP and where no regulatory or deployment reasons compel separate presentation of an NSP identifier, the NAP SHALL set NSP Identifier Flag to a value of ‘0’. In this case, when the MS detects the identifier of a NAP, the MS knows the identifier of associated NSP. The MS MAY continue NSP discovery to obtain verbose NSP name of the NSP. NSP ID is formatted as a 24 bit field that follows the format shown in Table 2. © EUROCAE, 20XX 40 Table 2: NSP ID format [32] In the authentication process described in section 4.1.2.4 of [32], the MS shall format the NAI (Network Access Identifier) used as an outer identity during EAP exchanges as follows:<routing realms><WiMAX decoration><username>@<realm> where: • Routing realms: Optionally used. The use of routing realm is described by RFC 4282. Example: [email protected] • WiMAX decoration: Optionally used to indicate various MS capability/intent. The WiMAX decoration is extensible. The WiMAX decoration consists of one or more attribute value pairs (avp) separated by the ‘|”enclosed within curly braces. • “{“ avp1 “|” avp2 ….“}” where an avp is formatted as: name“=”value with no spaces before and immediately after the “=”. The character set used for name and value must be consistent with the character set specified by RFC 4282. The name must be alphanumeric with no spaces. Example: {fm=1|xm=3}[email protected]. Currently there is no specific avp defined. • Additional requirements • When an aircraft (MS) lands and scans the AeroMACS band, it has to select a NAP, and then most likely the adequate NSP. The way/order in which the channels are scanned are implementation-dependent, as well as the way the preferred NAP is selected. The NAP (operator) selection will possibly rely on the following criteria: • Preferred operator (if commercial) • NSP support (especially the ability to support ATC flows and other needed flows, AOC at least) The criteria for NAP selection SHOULD be: 1. Select a NAP who is providing Aircraft connectivity 2. Select a NAP who is contracted (might not be compulsory for ATC traffic only) 3. Select the preferred NAP if several are possible (based on airline preferences) 4. Select a NAP who can provide ATC connectivity up to H-NSP 5. Select a NAP who can authenticate the aircraft (by relaying the AAA requests to the H-NSP) © EUROCAE, 20XX 41 The previous criteria can be respected either by a) analysing the Operator ID (that should be encoded in a specific way), or b) pre-determine channel values/operator IDs in a local aircraft configuration file, or c) analyse the NSP IDs supported by the NAP and select the NAP depending on the NSP ID. It is proposed to define a way to encode the Operator IDs in order to identify ICAO and aircraft-connectivity operators - same proposal for NSP ID – (however, it might be difficult to get a range of IDs from IEEE). The MS will need anyway to have locally allowed Operator ID values, allowed channels depending on the location, H-NSP ID and associated realm. The MS should use the H-NSP realm as <routing realm> in authentication process and the ASN shall use this parameter to route to the proper NSP It needs to be noted that the recommendations articulated in this sub-section are guidelines for the implementation of NAP/NSP selection algorithms. However, since they are not standardized, the final solution relies on the decision made at system deployment. 3.3 Airport network infrastructure AeroMACS system has to be connected to a network providing ATC and AOC services. From a general point of view, ATC airport network is a combination of several LANs dedicated to data (radar, supervision) and voice (VoIP) which are interconnected via one (or more redundant) router(s). ATC airport network is usually interconnected to the ANSP national network. The AOC network is usually accessible through a CSN. The next sub-section provides as an example deployment of a hypothetical AeroMACS implementation at Barajas Madrid airport, which has been studied for SESAR validation work on AeroMACS. The way AeroMACS network shall be integrated within airport network depends on the deployment solution. 3.3.1 Barajas airport network topology A general overview of Barajas airport is shown in Figure 13, in which we can find four terminals; T1, T2, T3, T4 and one satellite terminal; T4S. In order to have an overall idea of Barajas airport dimensions, distances between terminals are included. The most relevant control buildings are also shown; Airport Operation Control Centre, West and North Control Towers located at Terminal 4 and Satellite Terminal 4, and also the South Tower located at Terminal 2. © EUROCAE, 20XX 42 Figure 13: Barajas terminal map overview The next paragraphs describe a general overview of the networks deployed at Barajas airport which could provide the necessary means for the integration of AeroMACS network. Although this subsection is focused only on Barajas airport, general guidelines are listed. Nevertheless, each deployment will need a particular study for the integration solution. Multiservice Airport Network (MAN) The multiservice airport network offers more than 50000 access ports and network access equipment is deployed all over the airport (see Figure 14). It is composed of three main nets extending over the terminals (T1-T2-T3, T4 and T4-S) and one more covering the Airport Data Process Centre. All these networks are integrated through a MPLS Core which could manage 40 Gbits/s. The multiservice airport network supports the connectivity with traditional DSP (e.g. SITA, ARINC ...). © EUROCAE, 20XX 43 Figure 14: Barajas Multiservice Airport Network Topology The infrastructure provided by the multiservice airport network supplies logical and physical redundancy (network access equipment duplicated) just in Control Towers and Data Process Centre due to its high relevance. Network access equipment supports the integration of AeroMACS system (ASN-GW, BS …) in accordance with Ethernet Standards supporting data services up to 100 Mbps with UTP cabling. The network access locations are situated mainly near airport terminals. It is assumed that some BSs could be deployed just in airport facilities with network access equipment. On the other hand and especially for BSs deployed near runways it is likely that no equipment is available so it would be necessary to make a study in order to reach the network access equipment through e.g. optical fibre infrastructure situated near the BS location. Air Navigation Data Network (ANDN) Barajas ANDN consists of a primary node located at Tower-N, which provides connectivity to all air navigation elements. Secondary nodes, which are connected to the primary one, are located in Tower-S and Tower-N, and outside the airport there is another access point at AENA headquarters (situated few kilometres away from the airport). The Air Navigation Data Network supports the connectivity with traditional DSP (e.g. SITA, ARINC ...). In order to achieve the integration of AeroMACS system in ANDN, apart from the airport infrastructure, there are two main cabling infrastructures deployed at Barajas airport by the Air Navigation Service Provider. The first one is comprised of two optical fibre rings deployed around the four runways which connect the radio navigation aids to the ANDN nodes at Tower-S and Tower-N, although Tower-W is also connected to the ring through twisted pair and optical fibre cabling. Figure 15 depicts it. © EUROCAE, 20XX 44 Figure 15: Barajas radio navigation aids cabling infrastructure Circles and squares represent radio navigation aids locations with infrastructure available (optical fibre or twisted pair cable) to connect BSs to air navigation data network nodes. As we can see in the figure above, the number of sites is limited so in many cases, where the BS is far from this infrastructure access points, it will be necessary to deploy the physical communication means between the BS and the connectivity access point. Once the BS reaches the access point (e.g. GP 18L) it may be integrated in the ANDN (E1, E2 … interface) or it may make use of the available cabling (e.g. free pairs of optical fibre) or in the last case it could be necessary to install proper physical communication means. The second one consists of four optical fibre rings deployed around the airport for the multi-lateration system (MLAT). As we can see in Figure 16 below (circles represent MLAT stations), the deployment of MLAT system offers • High density of sites with infrastructure available to install BSs near terminals (RAMP area). • Medium density of sites with infrastructure available to install BSs near runways (GROUND and TOWER areas). Due to the high number of MLAT sites deployed, it is likely that BSs would be placed in these locations, so it would not be necessary to deploy a proper communication means between the BS and the access point to the infrastructure. In the case of MLAT network, AeroMACS system could take advantage just from the cabling infrastructure and it is not likely that AeroMACS system will be integrated in the MLAT network. © EUROCAE, 20XX 45 Figure 16: Barajas MLAT system cabling infrastructure 3.4 3.4.1 Deployment models NSP & NAP deployment models This section describes the foreseen deployments of NSP and NAP in an AeroMACS network. Source is [48]. The models affect the number of possible NSPs and NAPs serving a given airport (one vs several) and the business model of the potential AeroMACS service providers. NAP sharing by multiple NSP This deployment model should be preferred by NSP and NAP in order to rationalize infrastructure, ease cell planning at a given airport, and minimize interference on legacy systems (e.g. Globalstar) with probably less Base Stations due to a more efficient use of the spectrum. © EUROCAE, 20XX 46 Figure 17: Single NAP - Multiple NSP Several CSNs might share the same ASN. The most common deployment expected is one single ASN within the airport and multiple operators (CSNs) connected. This is the most likely business scenario for AeroMACS. The NAP deploys and provides the access network to ARINC, SITA, AVICOM, etc. playing the role of a H-NSP who manages the relationship with airports on behalf of the airlines. Airlines could act as H-NSP or have contractual agreements with different H-NSP. In this scenario, ASN-GW will advertise for incoming new MSs on the Access Network that there are different NSPs (see section 3.2), enabling the MS to establish data communication to its NSPs through AeroMACS ASN and relaying them to reach final airline operator. Single NSP Providing Access through Multiple NAPs This deployment model should be foreseen by NSP to extend its coverage at regional scale in relying on local NAP (e.g. extension to several airports by one service provider like SITA or ARINC). Figure 18: Multiple NAP - Single NSP If one NAP cannot provide full coverage for an NSP in a given area, the NSP can have agreements with multiple NAPs. This model is compatible with the previous one, i.e. multiple NAPs can be serviced by multiple NSPs and vice-versa. There should be a distinction within this model whether the NAPs served by a single NSP are collocated in the same airport or not. In the first case, the deployment option of placing the sensitive servers needed (mainly AAA and DHCP) locally would be possible, and there would be no need to enable VNP end-to-end connectivity, packet forwarding or relay functions, thus simplifying the rollout and operation of the network. In the latter case, a connectivity to the global network would be necessary. Greenfield NAP+NSP This deployment model should be foreseen by manufacturers and operator since they let flexibility to NSP to act or not as NAP depending on local issues. This model is not suitable to ANSPs but rather to ACSPs in areas where they will be allowed to act as NAP. A single NSP, corresponding to the same ACSP, operates the network. © EUROCAE, 20XX 47 Figure 19: Greenfield NAP-NSP Thus is to say, SITA, ARINC, NAVICOM… could be deploying themselves on the airport ground network side acting as the same entity for the NAP and NSP on the business model. An aircraft coming from a different airport should be served by the same H-NSP. Deployment scenarios proposed In a number of regions, the AeroMACS license will be acquired by the Aviation Authority and may be granted to ANSPs directly or to Airport telecom entity or subcontracted for operation to a service provider. In other regions, service providers such as ARINC and SITA could be granted a specific AeroMACS channel for AOC and ATC operations. The most likely deployment scenarios are illustrated in Table 3. Table 3: AeroMACS deployment scenarios proposed Use Case N° Descripti on NAP V-NSP H-NSP Deployment model Use case 1 No Fixed services Airport telco Airport telco For aircraft: -NAP sharing multiple NSPs. Mobile and Aircraft services on same channels Use case 2 No Fixed services (only NAP..) one (for vehicle : HNSP= VNSP) ACSP CSP The airline itself Airport telco for mobile N/A Airport telco for mobile ANSP for aircraft (one ANSP for For aircraft: Segregation between types of service by -One NSP providing access through multiple NAPs Segregation between vehicle/aircraft by using different channels Mobile services on a specific set of channels Aircraft services © EUROCAE, 20XX Segregation between vehicle/aircraft by using different Service flows -NAP sharing multiple NSPs by 48 on a specific set of channels NAP only for aircraft) Aircraft services on a specific set of channels SITA Use case 4 No Fixed services Airline (at airline Hub) Mobile and Aircraft services on same channels Use case 3 3.4.2 aircraft ACSP -Several NAPs CSP The airline itself DSP For aircraft: ARINC ACSP MSP CSP -Greenfield NAP+NSP -Several NAPs Segregation between vehicle/aircraft by using different channels The airline itself Airport telco Airline Subcontracted to CSP or Airline -Greenfield NAP+NSP -One NAPs Roaming scenarios Roaming is the capability of wireless networks via which a wireless subscriber obtains network services using a “visited network” operator’s coverage area. At the most basic level, roaming typically requires the ability to reuse authentication credentials provided/provisioned by the home operator in the visited network, successful user/MS authentication by the home operator, and a mechanism for billing reconciliation and optionally access to services available over the Internet services. In a possible roaming scenario, an aircraft landing on an airport network is managed by a NSP that is different from the aircraft Home NSP (H-NSP), and thus acting as a Visited NSP (V-NSP). Figure 20 shows the entities participating in roaming. This architecture SHALL not preclude roaming between NSPs. The architecture SHOULD allow a single NAP to serve multiple MSs using different private and public IP domains owned by different NSPs. A visited NSP may have roaming contractual relationship with the subscriber’s home NSP. The AAA framework in this scenario behaves as described in the corresponding section above, with the Visited NSP providing AAA traffic routing to the home AAA server with means to guarantee the confidentiality and safety of the procedure. The local AAA server can act as an AAA proxy when the network entry process of AeroMACS is triggered. © EUROCAE, 20XX 49 Figure 20: AeroMACS roaming architecture The second scenario foreseeable is the use of one single AAA server shared by all the NAPs and out of the H-NSPs. As a consequence, no roaming scenario will occur, whereas the risk of failure and the probability of not completing the network entry and the creation of the data path increase. This has been covered within [25]. Depending on the placement of the HA for data access purposes, the following cases are deemed relevant for aviation purposes; • Data Access via home NSP: This is the classic deployment where the H-NSP manages the HA function which establishes the paths to the correspondent nodes (CN) in the ATM ground network. As a consequence, the application flow to the end node is relayed from/to the mobile node care-of-address in the foreign network to the HA and later to the CN. Optimized architecture NEMO (Global HAHA), shown in Figure X, has been assessed both by NEWSKY and SANDRA projects. • Data access via correspondent router: This deployment model should be foreseen by NSP to let the opportunity for the mobile node to establish an optimized path directly with the correspondent router (CR) This leads to the benefit to optimize performance and have direct access to the CN in the ATM ground network (which may be located in the local access network), rather than having all traffic flowing to a central HA located in a remote location (shown in Figure Y). © EUROCAE, 20XX 50 Figure 21: Roaming scenario 1 [49] Figure 22:Roaming scenario 2 [49] Several technical solutions are under definition to handle Route Optimization (‘RO’ with Mobile IP).One option is the Global HAHA (where local Home agents can be deployed as illustrated in Figure 21), the other corresponds to the use of Correspondent routers (CR) operated locally by ANSPs. In all cases, a global home agent must be accessible permanently. © EUROCAE, 20XX 51 Note: SANDRA project concluded that use of CR versus global HAHA was more appropriate to ATM communications.[49] 3.5 AEROMACS AIRBORNE ARCHITECTURE A standard airborne AeroMACS system architecture will be developed by AEEC. It is not yet available at the publication time of the present document. In order to give an idea on how airborne AeroMACS system architecture might look like available material from SESAR P9.16 has been used to develop the proposals shown below, which should be considered as potential ways of implementing AeroMACS allowing for having early benefits from an AeroMACS implementation on one side and outlining the target architecture, which has to be considered on a long term basis as a second step, on the other side. The following explanations are based on material described in SESAR Project 9.16 document entitled AeroMACS Airborne System Requirements and Architecture Dossier (SRAD) [42]. 3.5.1 Foreword on overall Aircraft systems organisation ARINC-664 has defined a formalized organization of the aircraft systems and airborne networks into so-called “aircraft domains”. Aircraft domains are served by airborne networks and systems with the same requirements for performance, safety and security. In ARINC664P1-1 and ARINC664P5[schlereth9], it is suggested to group the aircraft computing network into four aircraft domains – the Aircraft Control Domain (ACD), the Airline Information Services Domain (AISD), the Passenger Information and Entertainment Services Domain (PIESD), and the Passenger Owned Devices Domain (PODD): • The Aircraft Control Domain comprises the systems which control the aircraft from the flight deck and the systems for environmental control, smoke detection and slides and doors management. • The Airline Information Services Domain provides operational and airline administrative information to the flight deck and the cabin and maintenance services and to support the passengers. • The Passenger Information and Entertainment Services Domain provides the inflight entertainment (i.e., video, audio, gaming), passenger flight information, and access to the Intranet and Internet using built-in terminals including related services like Voice over IP, Short Message Service (SMS), and Email. • The Passenger Owned Devices Domain is a network of those devices that passengers may bring on board to connect to the passenger information and entertainment services or to one another. • To ensure the appropriate level of safety and security, these domains are physically separated by appropriate means. Notably, aircraft control systems are separated from other domains. This strong partitioning results in the introduction of constraints and restrictions for the use of the communication systems by the different airborne data link applications. Typically: • Radio communication equipment attached to the ACD are today only accessible to data link applications (typically ATC/AOC) located in the ACD, • Radio communication equipment attached to the other domains are mainly for applications (typically AOC/AAC/APC) located in these domains. ACD applications have very limited access to these communication means (typically, they can be used in the Air-to-ground direction only by ACD applications), NOTE: The satellite data unit (SDU) is currently an exception to the above typical repartition. The SDU is currently shared between and simultaneously attached to the ACD and the other domains. However, this is tolerated through the application of very strict security requirements and security assurance processes on the equipment, notably for what relates to the segregation of the data flux and to the demonstration that the equipment cannot be used as a backdoor gateway in between the domains. © EUROCAE, 20XX 52 3.5.2 Assumptions regarding the initial implementation of Airborne AeroMACS systems: It is commonly assumed that first implementations of AeroMACS in Airports and on first aircraft could be deployed from 2016 onward. Due to its earlier deployment, AeroMACS might be the first ATN/IPS-compatible “Future Communication System” candidate for installation on aircraft. Hence, implementation of the AeroMACS in the Aircraft Control Domain (ACD) would need to be coordinated and come concurrently with other evolutions, such as: 1) An ATN/IPS router will need to be concurrently developed and certified, 2) Security issues pertaining to the interconnection of the ACD with external IP networks will have to be addressed. This may necessitate the development of specific security systems (e.g. firewall/proxy applications), 3) Adaptations at the level of the Airborne ATC applications and/or of the ACARS/ATN router will be needed to allow ATC communications though the AeroMACS. 4) Adaptations at the level of current AOC applications in the ACD will be needed to allow air/ground communications of these application though AeroMACS, 5) Cockpit HMI (Radio Management Panels, Flight Warning) and transverse functions (Central Maintenance System, Configuration Control Systems, ..) will be impacted. Given the significant amount of developments that might then be necessary, the introduction of the AeroMACS technology as a first ATN/IPS–compatible communication system in the ACD could be very challenging from a technical and business case standpoint. Based on this consideration, six scenarios covering nearterm to mid and long-term perspectives as well as support of different services have been identified. 3.5.3 Scenario 1-A – “Near term Initial installation of the AeroMACS MS in the AISD domains”: Scenario 1-A assumes that with a near term perspective, an AeroMACS MS could be initially introduced as an additional communication media of the AISD domain, attached to the existing AISD “Open IP” router, as a complement or alternative technology to the current or coming gatelink technologies (WIFI/GSM/GPRS/EDGE/UMTS/LTE/WIMAX...), Following this scenario, the AeroMACS system could be implemented as a standalone equipment similar to current TWLU equipment, or could be integrated (added) within the current gatelink communication equipment. © EUROCAE, 20XX 53 Aircraft Control Domain (ACD) FANS A/B (or C) ATC Applications AOC Applications in ACD Airline Information Services Domain (AISD) AOC Applications in AISD ACARS + ATN Router VHF system HF system (PIESD) (PODD) OpenIP Router SATCOM system Aeromacs system Gatelink system (Wifi / Cellular) Figure 23: AeroMACS system integration on A/C – Scenario 1-A Scenario 1-B – “Near-medium term Initial installation of the AeroMACS MS in the ACD domains”: Scenario 1-B assumes, in the short-medium term, the availability of an AeroMACS MS connected to the AISD domain but designed and pre-installed to be hosted in the ACD Domain in preparation of the longer term scenario 3A/B described farther below.. In terms of initial capabilities and supported services this AeroMACS MS is the same as the one shown in Scenario 1-A. The difference with Scenario 1-A is that a Scenario 1B AeroMACS equipment would be designed and possibly pre-installed to be directly interfaced with the ACD airborne network and with peripheral ACD avionics systems. In particular, a Scenario 1-B AeroMACS equipment could be designed with the physical Inputs/Outputs modules (e.g. ARINC 429, AFDX, …) necessary to interface with the ACD systems generally involved in the monitoring, control, and maintenance of ACD radio communication systems (e.g. to support possible interfaces with an ACD Radio Management Panel (RMP) or Multi Purpose Display Unit (MCDU), with the Failure Warning Computer (FWC), with the Aircraft Centralized Maintenance System (CMS), and Data Loading and Configuration System, etc…). The equipment would also be designed with provisions to support an interface with the future ATN/IPS router envisioned to be installed in the ACD at a longer term. © EUROCAE, 20XX 54 Aircraft Control Domain (ACD) FANS A/B (or C) ATC Applications Airline Information Services Domain (AISD) AOC Applications in ACD AOC Applications in AISD ACARS + ATN Router VHF system HF system (PODD) OpenIP Router SATCOM system (PIESD) Aeromacs system Gatelink system (Wifi / Cellular) Figure 24: AeroMACS system integration on A/C – Scenario 1-B 3.5.4 Scenario 2-A – “medium term Initial installation of the AeroMACS MS in the ACD domain”: Scenario 2-A assumes that with a medium term perspective, the AeroMACS MS could be initially developed and certified as a more global equipment, providing in the same “box” the following capabilities: 1) the AeroMACS MS functions, 2) an initial IP router function, 3) a (optional) security function at IP Level, 4) a function allowing the encapsulation of ACARS messages over IP (and AeroMACS) and possibly 5) a function allowing the encapsulation of ATN/OSI messages over IP (and AeroMACS). AeroMACS System Security assures secure Air to Ground and Ground to Air MS-BS communications, implementing authentication (PKMv2), data encryption (AES) and integrity check. On top of this AeroMACS security framework the AeroMACS “Box” can optionally implement a security capability at IP level (e.g. IPSEC) to improve privacy and integrity of communications. An (optional) Firewall capability, to improve segregation of the ACD domain from the outside IP world, can be also added. © EUROCAE, 20XX 55 ACARS + ATN Router OpenIP Router Figure 25: AeroMACS system integration on A/C – Scenario 2-A 3.5.5 Scenario 2-B – “medium term installation of the AeroMACS MS in both the ACD and AISD domains” In the medium term, the AeroMACS “Box” onboard could simultaneously be connected to the ACD and the AISD Domains, thanks to its capability to guarantee the needed segregation among ACD and AISD users. This approach is very similar to solutions currently envisaged for easing introduction of/transition to new IP-based satellite communication services in the ACD (Iridium and Immarsat-SBB). ACARS + ATN Router OpenIP Router © EUROCAE, 20XX 56 Figure 26: AeroMACS system integration on A/C – Scenario 2-B Being AeroMACS a native-IP system, it would be connected directly to the AISD OpenIP Router. Instead, the connectivity with the ACD COTS ACARS+ATN Router depicted in Figure 26 would be guaranteed by an appropriate SubNetwork Dependent Convergence Function Layer. A similar solution has been already tested and validated under the SANDRA Project, allowing interoperability between AeroMACS MSs and COTS ATN/OSI Routers. See Figure 27. A security capability, on top AeroMACS security framework, should be implemented at IP level. The AeroMACS “Box” security capabilities should encompass: • Data Authentication, Cyphering and Integrity check functions, to improve privacy and integrity of communications. • A Firewall function to segregate the ACD from the AISD domain, avoiding the Open IP world to access directly to the ACD Domain It has to be noted that the needed Security Requirements to be guaranteed by this Scenario increase the complexity of the AeroMACS MS, providing however the advantage of having a single MS connecting both ACD and AISD Users. ACD AISD OpenIP Router ACARS + ATN Router ATN/OSI Traffic IP Traffic IP -SNDCF ACD User AISD User AeroMACS Terminal SFs SFs Figure 27: Scenario 2-B: connection between AeroMACS and ACD/AISD 3.5.6 Scenario 3-A – “Longer term installation of the AeroMACS MS in the ACD domain” Scenario 3-A assumes that in a longer term, when Aircraft will be equipped with ATN/IPS router in the ACD domain, the AeroMACS MS will be developed as a certified (Lev. D) radio-communication system of the ACD domain, attached to the ATN/IPS router. © EUROCAE, 20XX 57 Aircraft Control Domain (ACD) FANS A/B (or C) ATC Applications Airline Information Services Domain (AISD) AOC AOC Applications Applications in ACD in AISD ACARS ACARS ATN ++ATN Router Routeur AeroIP AeroIP Routeur Router VHF HF SATCOM Aeromacs system system system system OpenIP OpenIP Router Routeur future SATCOM System (Ka) (PIESD) (PODD) Extended WACS (Wifi/GSM/ 4G+) Figure 28: AeroMACS system integration on A/C – Scenario 3-A 3.5.7 Scenario 3-B – “Longer term installation of the AeroMACS MS in both the ACD and AISD domains” Scenario 3-B assumes that in a longer term, when Aircraft will be equipped with ATN/IPS router in the ACD domain, the AeroMACS MS will be developed as a certified (lev. D) radio-communication system of the ACD domain, attached to both the ATN/IPS router and the AISD “Open IP” router. The needed segregation between ACD and AISD users will be granted by the AeroMACS system and, by IP level security capabilities (as explained in the scenario 2-B) implemented between the ATN/IPS (referred to as AeroIP) and OpenIP routers (outside the AeroMACS MS onboard system). See Figure 29 and Figure 30. Aircraft Control Domain (ACD) FANS A/B (or C) ATC Applications AOC AOC Applications Applications in ACD in AISD ACARS ACARS ATN ++ATN Router Routeur VHF system HF system Airline Information Services Domain (AISD) AeroIP AeroIP Routeur Router SATCOM Aeromacs system system OpenIP OpenIP Router Routeur future SATCOM System (Ka) © EUROCAE, 20XX Extended WACS (Wifi/GSM/ 4G+) (PIESD) (PODD) 58 Figure 29: AeroMACS system integration on A/C – Scenario 3-B OpenIP Router AeroIP Router Figure 30: Scenario 3-B: connection between AeroMACS and ACD/AISD The above scenarios define different strategies for implementing an AeroMACS System on aircraft, which may lead to the definition of different airborne AeroMACS System architectures. It is worth underlying that possible combinations of the above Scenarios could also be envisaged. For instance, the possibility to implement both Scenarios 1-A and 3-A, in the Long Term should not be precluded. This scenario could allow using 2 separated AeroMACS MS devices onboard, using a single antenna thanks to the appropriate branching system. This solution would grant a physical segregation between ACD and AISD domains. See Figure 31. © EUROCAE, 20XX 59 AeroIP Router OpenIP Router Figure 31: Physical Segregation between ACD and AISD © EUROCAE, 20XX 60 CHAPTER 4 APPLICATIONS This section covers the list of services to be supported by AeroMACS. Service instantiation deemed and description for an operational landing, turnaround and take off procedure is provided. The description is the basis for simulation results outlined in 12.1.2. One step further, QoS figures, continuity, integrity and availability have been proposed. It foresees several QoS levels to support AeroMACS services. In addition, the mapping between different levels of QoS (application, IP and AeroMACS) has been addressed. 4.1 Operational concept This section aims to refine the Traffic Model for AeroMACS developed in [6] by describing the instantiation of the service sequence in time. This is done by defining the operational use of AeroMACS in the departure and arrival phases in airport surface and mapping the service list to the chronological description of these operations. Previous work carried out in [1], [11] and [28] are taken as a reference. When an aircraft executes its complete operation cycle in an airport, both arrival and departure phases are completed. During a given period between these, the aircraft is in turn-around phase, but this is considered just as a physical status of the aircraft and not an operational phase here since it does not define a separation between arrival and departure. Thus, arrival sequence finishes when all the related services are completed. Departure sequence will not start until the previous arrival is correctly finished. This will happen at an undetermined moment between door opening and closure. All the pre-departure sequence and related services are considered as departure. The figure below depicts the time evolution of the operational phases and events considered in this analysis. Time events establish the start and end of the operation periods. Operation periods are executed in specific operational domains (RAMP, GROUND, TOWER), which can be managed by different type of controllers and, as thus, define a different set of executed ATC/AOC/NET services. Figure 32: Flight phases and events in APT surface Time events are explained below: LDT: Landing Time. Event at which the aircraft wheels touch down the runway. © EUROCAE, 20XX 61 LDT’: Landing Time for AeroMACS. It stands for the instant at which the aircraft moves below the maximum speed supported by AeroMACS (50 knots) IBT: In-Block Time. Event at which the aircraft stops moving at the stand. DO: Doors Open. Disembark can start, arrival phase can finish. DC: Doors Close. Departure phase has already started, boarding has finished. SUR: Start-up Request. Aircraft is ready to block off, waiting for ATSU permission. SUC: Start-up Clearance. ATSU permission delivered. OBT: Off-Block Time. Event at which the aircraft starts moving off the stand. TOT’: Take Off Time for AeroMACS. It stands for the instant at which the aircraft is expected to move over the maximum speed supported by AeroMACS (50 knots) TOT: Take Off Time. Event at which the aircraft wheels off the runway. Time periods are explained below: RIP: Runway-In Period. The aircraft moves within and out of the runway after landing. XIP: Unimpeded Taxiing-In Period. Aircraft moves by its own means from the landing runway to the assigned stand. TAP: Turn Around Period. The aircraft stays at the gate and is serviced for post-arrival and pre-departure operations. PBP: Push-Back Period. The aircraft is moved back by a tug from the stand to a position in which it can proceed to taxiing. XOP: Unimpeded Taxiing-Out Period. Aircraft moves by its own means from the stand to the assigned take-off runway. RHOP: Runway Holding and Out Period. It includes the likely Runway Holding (RHP) plus the runway out movement itself. The services included gather the subset of services from [6] deemed applicable in an operational scenario in airport surface that is covered by AeroMACS system. The service model has not been limited to those used to guarantee safety of life and regularity of flight, but also operational control services have been included in order to test the technology for the support of this traffic and facilitate the future aggregation of services in the same pipeline. Air Traffic Services (ATS) include Air Traffic Control, Flight Information services and Alerting service. These services are provided by Air Traffic Service Units (ATSUs) performing specific ATS services. Communications, navigation and surveillance on the ground and in the aircraft support these ATS services. The ATS categories applicable to airport surface are the following: Data Communications Management Services (DCM). These involve Data Link Logon and ATC Communication Management. Clearance / Instruction Services (CIS). These involve ATC Clearance, Departure Clearance, Data Link Taxi and Common Trajectory Coordination. Flight Information Services (FIS). These involve Data Link Operational Terminal Information Service, Significant Meteorological Information, Runway Visual Range and Surface Information and Guidance. Flight Position / Intent / Preferences Services (FPS). These involve Surveillance, Flight Plan Consistency and Intent, and Pilot Preferences Downlink. Emergency Information Services (EIS). This involves Data Link Alert. According to WG78 naming [refSPR], the services can be categorized in a different manner. These are explained below: Context Management (CM). The functions of CM are Contact, Logon and Update. CM ground systems can be configured to operate either in their domain of responsibility or for a facility outside their domain. Controller Pilot Data Link Communications (CPDLC). The CPDLC functions required are Controller-pilot message exchange function, transfer of data authority function and downstream clearance function. © EUROCAE, 20XX 62 Automatic Dependent Surveillance (ADS-C). The functions of ADS-C include the following functions: demand, event, periodic, cancel contracts and operation in emergency/urgency mode. The ATSUs are capable of requesting different types of contracts, and the aircraft system elements are capable of providing ADS-C reports to support the contract requests. Digital Flight Information Services (D-FIS). Flight Information Services is an ATS application by which the flight crew can retrieve operational data from an ATSU System providing flight information services. These encompass meteorological and various other information which may affect the departure, approach and landing flight phases as well as surface operations. Aeronautical Operational Control (AOC) are services that involve data communication between the aircraft and the AOC centre, company or operational staff at an airport. Legacy AOC (L-AOC). This category contains AOC data communication services that are expected to be in use during Phase 1 and Phase 2 and were listed in COCRv2 [1]. Electronic Flight Bag (EFB). This category includes the services that were not part of the COCRv2 [1] document and are operational or foreseen to be operational in the 2020-2025 timeframe. EFB is an electronic information management device that replaces current paper-based flight bag by including and updating electronic manuals and documents, automated calculation and navigation tools. The included services can be categorized as EFB hosted services in 2020, however other implementations of the same service on different platforms are also possible. Sporadic (S) services. These are specific L-AOC or EFB services that have a limited instantiation, i.e. they are executed seldom in a departure/arrival phase (instance probability lower than 10% [6]). They involve software or chart update on the FMS system in the aircraft, action that is executed after a given number of flights, with a subsequent heavy load transfer. They will be included in a worst-case scenario in which an aircraft requires a complete update of the system. Network Management (NET). These services are used to establish and maintain connections between each pair of aircraft and ground systems. Below the list of services executed in an orderly and categorized manner is proposed for the analysis in both phases of study (departure and arrival). This list is the basis to build the per-scenario service model defining the chronological execution. Categorization and chronology will also be used to drive the classification of service model applied to quality of service (QoS) politics. Table 4: Services executed during departure phase Operational domain execution RAMP 1 Service Category Application Application FRS data services WG78 ATS services [1], [28] [11] Directionality NETCONN Network connection NET NET - G ↔ A/C NETKEEP Network keep-alive NET NET - G ↔ A/C DLL Data Link Logon ATC DCM CM AOCDLL Airport Operational Center Data Link Logon AOC L-AOC LOADSHT Load Sheet Request/Transfer AOC L-AOC This service is named Data Link Initiation (DLIC) in WG78 documentation [11] © EUROCAE, 20XX - 1 G ↔ A/C G ↔ A/C G ↔ A/C 63 Operational domain execution Service Category Application Application FRS data services WG78 ATS services [1], [28] [11] Directionality E-CHARTS e-Charts Update AOC EFB (S) - G → A/C UPLIB Update Electronic Library AOC L-AOC (S) - G → A/C SWCONF Software configuration management AOC EFB SWLOAD25 Software Loading (Part 25) AOC EFB (S) - G → A/C SWLOAD Software Loading AOC L-AOC (S) - G → A/C BRFCD Aircraft Briefing Cards AOC EFB - G → A/C ACLOG Aircraft Technical Log Rectification AOC EFB TECHLOG Technical Log Book Update AOC L-AOC - G ↔ A/C AIRWORTH Airworthiness Statement AOC EFB - G → A/C WXTEXT Textual Weather Report AOC L-AOC - G ↔ A/C PASSENGER Passenger Information List/Manifest AOC EFB CREW-RPS Crew rotation/planning/scheduling AOC EFB CREW-BUL Crew Briefings/Bulletins AOC EFB CREW-REG Flight Crew Recency Registration AOC EFB FLTPLAN Flight Plan Data AOC L-AOC - G ↔ A/C NOTAM Company's Notice to Airmen AOC EFB - G → A/C COTRAC (interactive) Common Trajectory Coordination ATC CIS EFF Electronic Flight Folder Exchange AOC EFB WXGRAPH Graphical Weather Information AOC L-AOC CREW-L Crew list AOC EFB - G → A/C HANDLING Handling process Monitoring AOC EFB - G ← A/C CATERING Catering inventory AOC EFB - G ← A/C BAGGAGE Baggage Loading AOC EFB - G ↔ A/C © EUROCAE, 20XX - - - CPDLC - G ↔ A/C G ↔ A/C G → A/C G → A/C G → A/C G ← A/C G ↔ A/C G ↔ A/C G ↔ A/C 64 Operational domain execution GROUND Service Category Application Application FRS data services WG78 ATS services [1], [28] [11] - Directionality NOTOC Notice to Captain AOC EFB LOADDOC Load documentation Acceptance AOC EFB PREFLT-INS Pre-Flight Inspection Signoff AOC EFB D-OTIS Data Link Operational Terminal Information Service ATC FIS D-SIGMET Data Link Significant Meteorological Information ATC FIS DOOR Aircraft Door movements AOC EFB - G ← A/C DCL Departure clearance ATC CIS CPDLC G ↔ A/C FLOWCON Flow Control (CTOT & Routing) AOC EFB FLIPCY Flight Plan Consistency ATC FPS - G ↔ A/C FLIPINT Flight Path Intent ATC FPS - G ↔ A/C D-RVR Data Link Runway Visual Range ATC FIS D-SIG Data Link Surface Information and Guidance ATC FIS EFFU Electronic Flight Folder Update AOC EFB TAKEOFFCALC Takeoff Performance Calculation AOC EFB D-FLUP Data Link Flight Update ATC AVS - G ↔ A/C PPD Pilot preferences downlink ATC FPS - G ↔ A/C D-TAXI Data Link Taxi Clearance ATC CIS CPDLC G ↔ A/C OOOI Out-Off-On-In AOC L-AOC - G ← A/C SURV Air Traffic Control Surveillance ATC FPS ACL ATC clearance ATC CIS ACM ATC Communication Management ATC DCM 2 G → A/C - G ← A/C - G ← A/C D-FIS D-FIS G ↔ A/C 2 G ↔ A/C - G ↔ A/C D-FIS G ↔ A/C - G ↔ A/C - G ↔ A/C - G ↔ A/C ADS-C 3 CPDLC 4 G → A/C CPDLC This service is included inside Hazardous Weather service (D-HZWX) in WG78 documentation [11] Equivalent to Position Report (PR) in WG78 documentation [11] 4 This service is named Clearence Request and Delivery (CRD) in WG78 documentation [11] 3 © EUROCAE, 20XX G ↔ A/C G ↔ A/C 65 Operational domain execution TOWER Service Category Application Application FRS data services WG78 ATS services [1], [28] [11] WXRT Real Time Weather Reports for Met Office AOC L-AOC OOOI Out-Off-On-In AOC L-AOC ACM ATC Communication Management ATC DCM - Directionality G ← A/C - G ← A/C CPDLC G ↔ A/C Table 5: Services executed during arrival phase Application Operational domain execution TOWER GROUND RAMP 5 Service Category FRS data services Application WG78 ATS Directionality services [1], [28] [11] L-AOC - G ← A/C NET NET - G ↔ A/C OOOI Out-Off-On-In NETKEEP Network keep-alive AUTOLANDREG Autoland Registration AOC EFB ACM ATC Communication Management ATC DCM CPDLC SURV Air Traffic Control Surveillance ATC FPS ADS-C ACL ATC clearance ATC CIS CPDLC D-SIG Data Link Surface Information and Guidance ATC FIS D-TAXI Data Link Taxi Clearance ATC CIS CPDLC G ↔ A/C EFFU Electronic Flight Folder Update AOC EFB - G ↔ A/C FLTJOURNAL Flight Journal Documentation AOC EFB TECHLOG Technical Log Book Update AOC L-AOC - G ↔ A/C CREW-TIME Flight Deck Duty Time Registration AOC EFB - G ← A/C OOOI Out-Off-On-In AOC L-AOC - G ← A/C FOQA Data Transfer (DFDR/QAR bulk data download) AOC EFB FLTLOG Flight Log Transfer AOC L-AOC - G ← A/C CABINLOG Cabin Log AOC L-AOC - G ← A/C ETS-REPORT Post flight report required for ETS AOC EFB - G ← A/C Equivalent to Position Report (PR) in WG78 documentation [11] © EUROCAE, 20XX AOC - G ← A/C 5 - - - G ↔ A/C G → A/C G ↔ A/C G ↔ A/C G ← A/C G ← A/C 66 Application Operational domain execution Service Category FRS data services [1], [28] Application WG78 ATS Directionality services [11] (Emissions Trading Scheme) 4.2 REFUEL Fuel ordering (Tickets) / Fuel Release AOC EFB ACM ATC Communication Management ATC DCM CPDLC Service instantiation Not all services in departure phase are executed in every operation. As described in [6] services such as E-CHARTS, UPLIB, SWLOAD and SWLOAD25 are assumed to have a low instance probability and a very high load in channel, so different scenarios need to be simulated. In this previous description, a complete set of possible services is depicted. During operations, some services may be executed simultaneously but others need to wait previous services to have finished thus a chronological order of implementation need to be defined. The latter are defined as sequential services that require a correct finalisation of previous services that represent previous necessary actions that involve the pilot and the ATC or AOC operator. This model is depicted in the figures below. Note that surveillance (SURV) service has been included in this hypothetical sequence scenario. Although not a primary use of AeroMACS, the data link can be considered an enabler for message exchange between ground and aircraft that supports ADS-C and ADS-B services. As so, this service will be included and simulated in this analysis in order to test the ability of AeroMACS to provide it. Figure 33: Sequential execution of services in arrival © EUROCAE, 20XX G ← A/C G ↔ A/C 67 Figure 34: Sequential execution of services in departure 4.3 QoS model Every service needs to be mapped to a Class of Service (CoS). Each CoS will be treated differently per service flow by AeroMACS, by guaranteeing a maximum latency or minimum throughput. This leads to prioritization politics in AeroMACS transmission queues, by optimizing the packet sending rate that covers all the service class policy. QoS model proposed in this analysis is based on the two existing references that are applicable to AeroMACS, namely: ICAO 9896 [12] provides a recommendation to support legacy ATN applications over the IPS, mapping ATS services to proposed CoS (very High, High, Normal and Best Effort), shown below. © EUROCAE, 20XX 68 The classification required for AeroMACS is outlined in the Table 7. This service categorization has been extracted from COCRv2 [1] and SJU AOC service studies [28]. Table 6: ATN/IPS priority mapping into classes proposed by [12] The CoS classification used in this analysis can be seen below. It is based on the basic classificationn outlined in Table 8, and ICAO recommendation is taken as guidance to define the mapping for ATS services. These have been classified in three categories according to the application they are part of. The link with SESAR 15.2.7 WA2 defined CoS [6] is shown in Table 7. Regarding AOC, they have been classified into the two existing categories according to the load/latency requirement ratio as well as the CoS allocation in Table 8. Hence, a priority AOC category covers services that transmit a low amount of information in a reduced time normally related to clearances and reports. The lowest AOC category involves transfer of high amount of information (e.g. updates, files, etc) and is aimed to be executed in the background with the remaining free bandwidth. © EUROCAE, 20XX 69 Table 7: CoS classification for Airport Capacity Analysis CoS Services included NET • ATS1 • ATS2 AOC1 AOC2 NET services DG-A NETKEEP, NETCONN FPS by ADS-C DB-D SURV CIS (CPDLC) DG-C • ACL, COTRAC, DCL, D-TAXI FPS • FLIPCY, FLIPINT, PPD DCM ATS3 • DLL, ACM FIS • D-OTIS, D-SIGMET, D-RVR, D-SIG AVS • • D-FLUP AOCDLL, CABINLOG, FLTLOG, FLTPLAN, LOADSHT, OOOI, TECHLOG, WXGRAPH, WXRT, WXTEXT, BRFCD, DOOR, ACLOG, AIRWORTH, AUTOLAND-REG, BAGGAGE, NOTAM, CATERING, CREW-L, CREW-RPS, CREW-BUL, CREW-REG, CREW-TIME, FLOWCON, REFUEL, HANDLING, LOADDOC, NOTOC, PASSENGER, PREFLT-INS, TAKEOFF-CALC SWLOAD, UPLIB, EFF, EFFU, E-CHARTS, FLTJOURNAL, FOQA, SWLOAD25, SWCONF • SESAR P15.2.7 CoS [6] DG-D DG-C DG-D DG-F DG-J DG-K DG-K DG-L 6 This model for CoS has been taken as hypothesis to develop the QoS configuration in the capacity analysis. Regarding the requirements set by each CoS, service flows and QoS parameters will be defined at the radio link to be compliant with the required figures. 6 It should be mentioned that for ADS-C and CPDLC applications a different priority level has been selected compared to the ATN/IPS priority mapping. Reason for that is that EUROCAE WG78 classification requires it. © EUROCAE, 20XX 70 CHAPTER 5 AEROMACS OPERATIONAL REQUIREMENTS This section aims to gather worthwhile information that helps to understand the rationale for system characteristics, operational goals, requirements and workout of AeroMACS data link. An operational requirement is a statement of the operational attributes of a system needed for the effective and/or efficient provision of air traffic services to users. Those attributes include the process of ensuring that safety, performance, and interoperability objectives and requirements for the ATS and operating environment are maintained throughout operations [11]. AeroMACS as a radio data link aimed for airports shall be an enabler to enhance the productivity and safety of ATS by optimizing the involvement of controllers, aircrew and airline operators through integrated data communications, improved forms of surveillance and automation. In Europe AeroMACS SHALL support only mobile services. AeroMACS SHALL support data services (NET, ATC and AOC). AeroMACS SHOULD support voice services. 5.1 Operating Altitude AeroMACS SHALL be available, exclusively, on the airport surface. Only the A/Cs on the ground will trigger services through AeroMACS. 5.2 Coverage The foreseen operational area for AeroMACS goes from terminals (RAMP area) to taxiing zones (GROUND and TOWER). AeroMACS operating coverage SHALL extend to full airport area. It’s important to point out that coverage area is much related to specific deployment cases. In order to fully accomplish this statement, a specific deployment design could be performed attending to different means such as capacity required, number of nodes, path loss constraints, clutter distribution within the airport area (forest, water, buildings…) etc. AeroMACS SHALL guarantee full coverage for more stringent services (like NET and ATC) within the whole operational set of zones. Mainly those zones are RAMP area (operational turnaround zones) and taxiways. 5.3 ATS and AOC support AeroMACS SHALL support all ATC data services related to safety and regularity of flight as encountered at airport surface level. AeroMACS SHALL support all AOC data services related to safety and regularity of flight and as encountered at airport surface level. AeroMACS SHALL support airport vehicles services related to safety and regularity of flight. AeroMACS SHOULD support VoIP services for airport operation. Note: Currently, it is not intended to support VoIP for ATC applications in Europe. 5.4 Registration procedure Aircraft device SHALL automatically register and de-register from AeroMACS system without intervention of human agents. 5.5 Mobility and Handover AeroMACS SHALL guarantee service availability for vehicles and home/visiting aircrafts within the airport. AeroMACS handover SHALL be transparent for applications. AeroMACS SHALL not jeopardize compliance with continuity of service requirements. © EUROCAE, 20XX 71 Service flows connections SHALL be kept and guarantee their continuity without service disruption from the user’s point of view. 5.6 Performance monitoring System monitoring SHALL be performed by organizations which operate the AeroMACS system or components. The monitoring capability of the AeroMACS SHALL NOT impede the working of the AeroMACS system. AeroMACS MAY enable advanced RRM by enabling the collection of reliable statistics over different timescales, including system (e.g., dropped call statistics, BS loading conditions, channel occupancy, RSSI), user (e.g., terminal capabilities, mobility statistics), flow, packet, etc. The safety requirements regarding detection and alert in case of ACSP failures are: • The ground system shall be capable of detecting ground system failures and configuration changes that would cause the communication service to no longer meet the requirements for the intended function. When the communication service no longer meets the requirements for the intended function, the ground system shall support notification capability. 5.7 System supervision The supervision capability of the AeroMACS SHALL NOT impede the working of the AeroMACS system. Information concerning identified problems on AeroMACS data link SHOULD be disseminated to operators and ATS providers to raise awareness and facilitate problem resolution. © EUROCAE, 20XX 72 CHAPTER 6 AEROMACS TECHNICAL REQUIREMENTS This section aims to gather technical requirements, which are related to the operational requirements outlined in section 5. 6.1 Min Max aircraft, vehicle speed AeroMACS data link SHALL be able to support every single data transaction related to ATM services while the A/C speed is lower or equal 50 knots. 6.2 ATS and AOC support AeroMACS SHALL support the necessary Network Management services (NET) as required by the supported safety of life and flight regularity services. 6.3 Registration procedure AeroMACS SHALL give means to create, configure and delete accurately user profiles with different grades of service in the access network AeroMACS maximum network entry time for a MS SHALL be less than 90 s. Note 1: The AeroMACS channels are 5 MHz wide and the applicable band (5002,5 MHz to 5147,5 MHz) has been channelized with reference to the nominal centre frequencies (5005+n*5 MHz with n=0 to 28). Note 2: The AeroMACS equipment is required to be able to tune in to authorised frequencies with a resolution of 250 KHz. While in normal operations the nominal centre frequencies SHOULD be used, the 250 KHz step size resolution is foreseen to provide flexibility in interference cases and to allow AeroMACS operations to avoid receiving or causing interference to other systems operating in the band such as MLS, AMT, or other users. Note 3: In order to reduce the Net Entry Time, a possible solution is to pre-provision the MS with frequency it SHALL use at the start-up (i.e. at the destination airport). 6.4 Mobility and Handover AeroMACS SHALL be capable to operate within the FCI multilink architecture and associated data links whenever these other FCI data links are available. AeroMACS SHALL support hard handover between BSs. The handover procedure SHALL be initiated by the MS. During handover procedure, ASN-GW SHALL update the AK from the MS to the new serving BS. Therefore the whole set of keys is transferred to the BS (TEK) through PKM protocol. Besides it SHALL command the BS to destroy current SF and trigger the new BS to create the new SF. AeroMACS SHALL guarantee the transfer of the authorization policy and the mapping of the SA’s currently established of the MS triggering the HO. AeroMACS handover interruption time SHALL take no more than 200ms. 6.5 Synchronization and Timing Requirements AeroMACS MS SHALL be able to synchronize at the border of the AeroMACS cell. AeroMACS SHALL perform a resynchronization procedure of the MS after a signal loss. AeroMACS handover interruption time SHALL be kept sufficiently low to guarantee no service disruption within the whole operational turnaround of the aircraft in the airport surface. All the BSs SHALL get synchronized using a unique time reference getting an error of the clocks of better than ±2ppm. The maximum resynchronization time for the MS after signal loss SHALL be less than 10 s. © EUROCAE, 20XX 73 6.6 Data Latency Downlink one way data latency for NET and ATC services SHALL be < 20 ms. Uplink one way data latency for NET and ATC services SHALL be < 40 ms. Note: Simulation results showed that even 80 ms is sufficient to fulfil the application level requirements as outlined in section on capacity analysis. 6.7 Residual ERROR RATE The residual error rate, to/from subscriber station SHOULD be less than or equal to 5 x 10E-8 per SNSDU. 6.8 System supervision AeroMACS SHALL support VPN or VLAN in case it`s required for system supervision purposes. AeroMACS SHOULD support SNMP protocol in order to give to the operator of the network the means to supervise the status and get problems reports of the elements of the AeroMACS system. AeroMACS architecture SHOULD integrate a management information base (MIB). AeroMACS BSs SHOULD implement SNMP agents in order to enable its management whereas MSs SHALL NOT include any agent. AeroMACS problem resolution SHOULD be easily traced back to the point at which the problem was encountered from the SNMP protocol. © EUROCAE, 20XX 74 CHAPTER 7 QUALITY OF SERVICE REQUIREMENTS In a real deployment, a specific mapping of QoS levels SHALL be provided. NOTE: In section 4.3 one example of IP QoS to AeroMACS QoS map has been described, which has been used for capacity analysis simulations in order to address the mapping of different grade of services to AeroMACS QoS. AeroMACS SHALL provide means to guarantee data integrity. AeroMACS BSs SHALL be capable to establish different dynamic service flows (SF) to the MSs (with different parameters of throughput, jitter, delay, etc.) AeroMACS BS SHALL guarantee the dynamic change of a SF attending to different traffic patterns and requisites. AeroMACS SHALL implement different traffic schedule in order to accomplish differentiated class of service support. All messages of each transaction SHALL be mapped to one of the existing AeroMACS Class of Services (CoS) 7.1 AeroMACS Service Flows IEEE 802.16-2009 supports 5 QoS classes (in IEEE terminology they are called Service Flows), which are outlined in the following sub sections. 7.1.1 Extended Real-Time Polling Service Extended real time Polling Service (ertPS) is defined as a real-time service flows that generates variable-sized data packets on a periodic basis. An example of an ertPS based commercial communications application would be VOIP with silence suppression. AeroMACS shall support ertPS 7.1.2 Real-Time Polling Service Real time Polling Service (rtPS ) is defined as real-time data streams comprising variable-sized data packets that are issued at periodic intervals. An example of a rtPS based commercial communications application would be MPEG Video. AeroMACS shall support rtPS 7.1.3 Non-real Time Polling Service Non real time Polling Service (nrtPS) is defined as delay-tolerant data streams comprising variable-sized data packets for which a minimum data rate is required. An example of a nrtPS based commercial communications application would be FTP with guaranteed minimum throughput. AeroMACS shall support nrtPS 7.1.4 Best Effort Service Best Effort Service (BE) is defined as data streams for which no minimum service level is required and therefore may be handled on a space-available basis. An example of a BE based commercial communications application would be HTTP. AeroMACS shall support BE. © EUROCAE, 20XX 75 7.1.5 Unsolicited Grant Service Unsolicited Grant Service (UGS) is defined as real-time data streams comprising fixed-size data packets issued at periodic intervals – all being delay and delay variance critical. An example of a UGS based commercial communications application would be E1/T1 transport, or circuit switched voice or VOIP without silence suppression. NOTE : It is expected that in the future there will be no need any longer for circuit switched communications. AeroMACS shall support UGS. 7.2 Classes of Service AeroMACS SHALL support at least 6 classes of service. An example of a potential allocation of classes of service for ATC, AOC and NET services is outlined in Table 8. Table 8: AeroMACS classes of service example [3] Classes of Service CoS 1 (highest) CoS 2 CoS 3 CoS 4 CoS 5 CoS 6 ATS 1 ATS 2 ATS 3 AOC 1 AOC 2 ATS2 ATS 3 Surface operation Subscribers Aircraft NET services Surface vehicles NET services Additional implementation guidelines are outlined in Appendix XX (section 5 of TN#14 of Carlos[schlereth10]). © EUROCAE, 20XX 76 CHAPTER 8 SAFETY AND PERFORMANCE REQUIREMENTS 8.1 Safety and Performance requirements for the AeroMACS ground infrastructure In order to derive appropriate safety and performance requirements to implement AeroMACS, one can refer to ED-228 [40], which is the Safety and Performance standard for baseline 2 ATS data communications. Note: all the following information in this section are based on ED-228. ED-228 notably apportions safety and performance requirements to the ACSP domain which comprises the ground system supporting the air-ground communications network, and air-ground and ground-ground routers, operated by the ACSP. These requirements are thus relevant to derive requirements on the ASN and CSN (including home and visited CSN in case of roaming operations). Aircraft Procedures Flight Deck Flight crew Airborne End-System HMI Airborne router Airborne radio ASN Visited CSN ATSU Procedures (ATSU) End-System Access router Home CSN ACSP Controller HMI FIGURE 35: DEFINITION AND INTERCONNECTION OF AIRCRAFT, ACSP AND ATSU DOMAIN Requirements coming from ED-228 can be directly applicable to the AeroMACS infrastructure (CSN + ASN) in case AeroMACS would be the only subnetwork supporting Datalink services. If not, other subnetworks would be available (e.g VDL Mode 2), ED-228 requirements would have to be apportioned to AeroMACS infrastructure. 8.1.1 Performance requirements ED-228 expresses Performance requirements based on the following parameters: © EUROCAE, 20XX 77 Availability Availability is defined as the probability that the data communication system between the two parties is in service when needed, measured over a period of time. In addition, ED-228 introduces the additional parameters: • • • • Unplanned service outage duration (min) or MTTR Maximum number of unplanned service outages Maximum accumulated unplanned service outage time(min/yr) or sum of MTTR Unplanned service outage notification delay (min) Maximum Transaction time This time presents the maximum acceptable time, after which the initiator is required to revert to an alternative procedure. The Maximum Transaction Time is associated with probability, corresponding to the Continuity target. The maximum transaction time is stated as an expiration time (ET) for CPDLC and as Overdue Delivery Time (DT) for ADS-C. Nominal Time The nominal time (TT95%) for the CPDLC application (respectively (DT95%) for the ADS-C application) is defined as the time at which 95 percent of all Transactions, that are initiated, are completed. Continuity and Probability 95% The Continuity is linked with the Maximum Transaction Time, while the Probability95% is associated with the Nominal Time. Integrity Integrity is the probability that a transaction completes with no undetected errors. The following apportionment of requirements to the ACSP domain is defined in ED228: Table 9: ACSP Transaction Time Requirements [40] Maximum ACSP contribution Communication Surveillance ET (sec) C = 99.9% TT (sec) C = 95% OT (sec) C = 99.9% DT (sec) C = 95% 18 (two way transaction) 10 (two way transaction) 12 (one way transaction) 5 (one way transaction) Note: these performance requirements are based on most constraining performance labels specified in ED-228 (RCP130 and RSP160). © EUROCAE, 20XX 78 Table 10: ACSP Availability Requirements [40] ACSP requirements Availability 0.9995 Maximum Unplanned service outage duration (min) 6 Maximum number of service unplanned outages 40 Maximum accumulated service unplanned outage time(min/yr) 240 Unplanned service outage notification delay (min) 5 Note: these performance requirements are based on most constraining performance labels specified in ED-228 (RCP130 and RSP160). Integrity: ED-228 does not specify any requirement related to Integrity and applicable to the ACSP domain. 8.1.2 Safety requirements applicable to the ACSP domain Safety requirements applicable to AeroMACS are quite dependent upon overall communication architecture. However, compliance to here above performance requirements applicable to the ACSP domain should ensure compliance with quantitative safety requirements which would be defined according to ED-228 safety objectives. Software assurance level requirement is also dependent upon the design of the network. Nevertheless, manufacturers may consider to implement AeroMACS critical function in compliance with SWAL 4 objectives according to ED-153 [59]. 8.2 Guidances related to ATC and AOC throughput and packet size Required Throughput ATC: The overall (combined up and downlink) average data load supported by one cell/sector SHOULD be at least 0,6kbps (GROUND/TOWER) or 0,2kbps (RAMP). AOC: The overall (combined up and downlink) average data load supported by one cell/sector SHOULD be at least 800kbps (GROUND/TOWER) or 1Mbps (RAMP). These figures have been yielded from large airport case analysis (typically 50 A/C). Thus figures for smaller airports would be likely lower. Packet size (see capacity analysis in Appendix C): • AeroMACS average ATC message size is 190 Bytes. • AeroMACS average AOC message size is 278 kBytes. © EUROCAE, 20XX 79 Table 11: ATC and AOC required throughput and packet sizes ATC Required Throughput Overall (combined up and downlink) minimum average data load within one cell/sector of GROUND/TOWER OPS domain 0,6 kps Overall (combined up and downlink) minimum average data load within one cell/sector of RAMP OPS domain 0,2 kps AOC Required Throughput Overall (combined up and downlink) minimum average data load within one cell/sector of GROUND/TOWER OPS domain 800 kps Overall (combined up and downlink) minimum average data load within one cell/sector of RAMP OPS domain 1000 kps Packet size Average ATC message size 190 Bytes Average AOC message size 278 Bytes © EUROCAE, 20XX 80 CHAPTER 9 9.1 COVERAGE AND CAPACITY Inputs to Coverage and Capacity Requirements AeroMACS Coverage and Capacity requirements depend on many different parameters as listed below. These parameters will be addressed in succeeding paragraphs. Airport Parameters to be considered are: 1. Airport Terminal Layout type. 2. Airport Parking Layout type. 3. Type of Basic Airport Runway Layout. 4. Airport visiting A/C frame types and corresponding traffic mix (MTOW category: light – medium – heavy, mixed traffic, etc). 5. Within each airport different areas exist which need to be covered by AeroMACS. However these areas have different capacity needs. 6. Aircraft (MS) antenna heights with respect to ground. 9.1.1 Amount of Gates and Stands The total airport capacity is also determined by the amount of gates where A/C can be docked as well as the amount of A/C stands which are foreseen at the airport. Hence this factor will also determine the AeroMACS capacity needed at the airport. 9.1.2 Airport Areas Definitions Under SJU P15.2.7 WA2 a traffic model for airports has been developed [6]. This document follows an identical airport area distribution as developed in [4], which every A/C passes through during either departure or arrival phase of flight. These areas are defined in Appendix C. AeroMACS coverage requirements at an airport are also determined by the size of previously defined areas for this airport. 9.1.3 Airport visiting A/C frame types and airport traffic mix Because runway capacity has the largest impact on overall airport capacity it is important to notice that for any particular airport considered – irrespective of the basic category it belongs to - its runway capacity is also determined by the type of traffic and /or traffic mix this airport is attracting. An airport attracting many light aircraft will have a larger capacity compared to an identical airport attracting mainly heavy (commercial A/C – wide bodies – 100+ passenger A/C) aircraft. This is because the WAKE VORTEX created by these large aircraft is so large that the interval times between landings (as well as for departures) depend on the A/C size and weight. ICAO mandates separation minima based upon wake vortex categories that are, in turn, based upon the Maximum Take Off Mass (MTOW|MTOM) of the aircraft. These minima are categorized as follows: • • • Light – MTOW of 7,000 kilograms or less. Medium – MTOW of greater than 7,000 kilograms, but less than 136,000 kilograms. Heavy – MTOW of 136,000 kilograms or greater. NOTE: a new category named SUPER is created by for very large heavy weight such as A380. © EUROCAE, 20XX 81 During take off phase the following rules are applicable: • An aircraft of a lower wake vortex category must not be allowed to take off less than two minutes behind an aircraft of a higher wake vortex category. • If the following aircraft does not start its take off roll from the same point as the preceding aircraft, this is increased to three minutes. During landing phase the following separation minima shall be respected as indicated in the table below. Table 12: A/C separation minima Preceding aircraft Minimum radar separation Following aircraft Super 4 NM Heavy 6 NM Medium 7 NM Light 8 NM Heavy 4 NM Medium 5 NM Light 5 NM Light 4 NM Super Heavy Medium 9.1.4 Aircraft frame antenna heights from ground In order to provide good coverage, it is important to know for some of the most popular commercial aircraft frames the AeroMACS antenna height with respect to the ground surface. The following table provides a short overview of these heights: Table 13: Airframe heights with respect to ground 7 AIRCRAFT AeroMACS FRAME TYPE Antenna height 7 (m) A 318 5,9 A 320 5,91 A 340-500 7,55 A 330-200 8,22 Heights may fluctuate around 0,3 m depending on A/C load conditions. © EUROCAE, 20XX 82 9.1.5 A 380 10,74 A 350-900 8,09 B 737300/400/500 5,26 B 757 6,24 – 6,5 B 767 7,16 – 7,47 B 787 7,63 – 8,00 B 777 8,46 - 8,78 B 747 10,06 Traffic Modelling and Scenario Definition TRAFFIC MODELLING: From the Traffic Modelling described in [6] a total estimation has been made for all NET, ATC and AOC services to be delivered on a complete airport. For this estimation, the airport had been divided in the three defined airport areas as specified in [6]. For all these areas, different scenarios were provided in function of the amount of A/C at the airport. SCENARIO DEFINITION: The number of A/Cs stated in each scenario is in “average” the number of A/Cs spread all over the airport in a given time “t” for the simulations. Such an average value however includes landing as well as departing A/Cs. Nevertheless, numbers depicted for data rates tables 5-1 and 5-2 in [6] apply to the specific zone indicated in the scenario description. During a second simulation the average load for NET, ATC and AOC had been calculated for a single sector scenario. Once again different scenarios have been provided based on the total amount of A/C at an airport. NOTE: Traffic modelling considered in [6] had FOQA only included in GROUND scenario (UL Traffic). For all other scenarios FOQA had not been included. SCENARIO – A/C DWELL TIME RELATIONSHIP: The reader of the traffic analysis should be aware that the number of A/C described in any scenario also has to take into account the average dwell time an A/C stays in the areas described within this document. These dwell times are gathered in the table beneath (see also COCR V2 [1] for airport description). Table 14: A/C Dwell times vs A/C airport operation areas Airport area density and RAMP dwell time in min GROUND dwell time in min TOWER dwell time in min HD Phase 2 Departure 30 m 12 m 4,5 m HD Phase 2 Arrival 6m 8m 4,5 m LD Phase 2 Departure 15 m 6m 2,5 m © EUROCAE, 20XX 83 LD Phase 2 Arrival 3m 4m 2,5 m Hence it is important to notice that the average amount of time an A/C is residing at an area - as described in the scenarios - is defined by the dwell time at these areas. Because airport capacity is determined in an amount of operations/movements per hour, the dwell times need to be converted or linked to operations per hour. AIRPORT CAPACITY VERSUS SCENARIO INTERPOLATION: Within SESAR P15.2.7 WA 2 tasks [6], several airport scenarios have been taken into account to make data load requirements estimation. For this several scenarios have been worked out but it is clear that they may not all fit exactly all possible existing European airport size. Hence there may be a need to perform some interpolations in between scenarios to match a particular airport. ASSUMPTIONS ON TRAFFIC MIX: Because runway capacity as well as data load requirements depend heavily on the airport traffic mix, it is assumed that the majority of traffic (>95%) visiting the airports belong mainly to commercial aircraft (medium and heavy MTOW) class with few business flights (light), all traffic operating under IFR rules. AeroMACS DL (BS) and UL (A/C or MS) supported Data loads: The following table provides an overview of AeroMACS data throughput capacity for a single cell or sector (DL/UL = 2/1). These figures were drawn beforehand simulations. Table 15: AeroMACS expected throughputs vs modulation schemes MC scheme Downlink [kbps] QPSK1/2 Uplink [Kbps] 983.3 532.4 16QAM1/2 2153.52 1235.52 64QAM1/2 3595.04 1758.48 Available data rates are highly dependent on the following factors: 1. Modulation scheme used (see table above). 2. FEC used. 3. RF channel conditions which are varying in time. 4. Distance between A/C (MS) and BS. 5. Actual service flow demand by BS/MS. Hence it is clear that the actual data rate AeroMACS is able to support between BS and MS is difficult to establish. Therefore we assume that the data rates from the table above can be achieved. These inputs on data load estimations will be used in combination with all other inputs (specially coming from [6]) as defined in the previous paragraph to obtain load and coverage requirements. Single Sector data requirements: From Table 15 combined with scenario which is providing the data requirements for 20 A/C [6] for the whole airport area in departure mode, up to 20 A/C could be served by a single cell. © EUROCAE, 20XX 84 Table 16: Single Sector scenario – excluding FOQA Average offered load ATC (Kbits/sec) Average offered load AOC (Kbits/sec) Overall 0,84 1867,43 (~1,8 MBitps) FL 0,34 1619,49 RL 0,50 248,22 Scenario 20 A/C, 4 VC RAMP departure ATC, NET, AOC, EFF, UPLIB, E-CHARTS On scenario interpretation we could assume that 12 A/C may be in departure mode while 6 A/C would be arriving and another 2 would be within Tower area. European Airport database: In [10] an overview of all small, medium and large airports is provided including amount (not type) of runways, with for each case the amount of commercial movements. COCR V2.0 HD and LD airports; COCR defines airport density in a different way and defines only low and high density volumes for the different airport areas and phases. See table 2-12 Airport Controller Position PIACs in COCR [1]. Table 17: Airport size categories according to COCR Phase 1 Phase 2 APT Position HD LD HD LD Clearance/Ramp 134 4 194 7 Ground 48 3 70 4 Tower 18 5 26 8 Total 200 12 290 19 For this document, the COCR differentiation was found not to be detailed enough. So by refining the airport model and to provide better estimations of airport surface data requirements, airports have been split up in small, medium, large and super large airports. AIRPORT OPERATIONS/hr VS PASSENGER TRAFFIC: Airport size is in reality determined by the amount of passengers served on a yearly base and not on amount of operations handled per hour. However airport surface data throughputs are determined by the amount of operations per hour, therefore this last criterion prevails in this study. As can be seen from [10], Europe´ s largest airport is passenger wise London Heathrow, however Amsterdam Schiphol will be in this study the largest airport needing the highest data throughputs. Hence it is obvious that London will be visited by larger MTOW A/C than Amsterdam which is confirmed by the fact that London is the major European hub for transatlantic flights. © EUROCAE, 20XX 85 9.2 SESAR 15.2.7 Airport Categorization For this section, FL stands for “Forward Link” which operationally means data flowing from tower to the A/Cs and RL, “Reverse Link” that refers to packets going from A/Cs to the tower. 9.2.1.1 Small airports (<20mvts/hr) Single Runway- Simple Terminal Small airports are complying with the basic single runway category. Very often these airports belong to the simple terminal category though it may also belong to the satellite or curvilinear category. Because any airport needs to have at least a single runway, hence it is obvious that many airports exist in Europe having far less than 50 A/C operations per hour. For the single runway airport some subcategories have been worked out – all belonging to the small airports category. These subcategories will be differentiated by indicating the amount of A/C operations per hour. In Europe, airports such as KERKIRA, KOS, FUNCHAL, FUERTEVENTURA…etc, all match the requirements for small airports. NOTE: It may very well be possible that those airports having less than 5 operations per hour will never be equipped with AeroMACS either because it may not be economically viable or in order to preserve Globalstar interference limits. 9.2.1.1.1 Capacity Requirements for airports with 3 operations/hour It is very likely that the Airport service provider cannot justify the installation/maintenance cost for deploying the AeroMACS infrastructure. From previous Globalstar interference studies, it is also not likely that all small European airports will be allowed by ICAO FMG to be equipped with AeroMACS – to be confirmed after development of COM AeroMACS tables and establishment of interference criteria rules. In case of AeroMACS availability at such an airport it is obvious that any AeroMACS deployment will be able to serve any aircraft on the airport in a satisfactory manner, seen the small amount of A/C to be served. The scenarios 19 and 20 [6] fulfil these data rate requirements for RAMP arrival and departure. Even though these scenarios cover only 1 A/C, the A/C dwell time foreseen is around 21 minutes per A/C. Even if all A/C would arrive at the same time – which is very unlikely for such small airports – any AeroMACS deployment will be able to deliver expected data loads under such scenario. Scenarios 19, 20 are conform to such an airport data needs. Table 18: Airport capacity load for small airports (3 operations/hour) Scenario Average offered load ATC (Kbits/sec) © EUROCAE, 20XX Average offered load AOC (Kbits/sec) 86 Average offered load ATC (Kbits/sec) Scenario Scenario 19 (1 A/C, 1 VC) RAMP arrival Scenario 20 (1 A/C, 1 VC) RAMP departure/ ATC,NET,AOC,EFF,UPLIB,Echarts Average offered load AOC (Kbits/sec) Overall 0,0 0,23 FL 0,0 022 RL 0,0 0,01 Overall 0,04 56,69 FL 0,02 47,64 RL 0,02 9,35 According to the results drawn in [9], GROUND scenarios were raising problems due to the high load provoked by FOQA service. As stated on the conclusions, FOQA service was encouraged to be moved to RAMP area, where presumably, will be higher data rates due to the proximity to the BS. Therefore a recalculation of Table 18Table 18 values has to be done in order to introduce FOQA on the capacity analysis for RAMP area. The main considerations taken are shown below in order to achieve the “movement” of FOQA service from GROUND arrival to RAMP arrival, knowing that simulations cannot be triggered again. According to data yielded on [6] for scenario 9, table A.9-68. of the appendix, the relative volume of FOQA’s packets generated to the rest of the services is 83,38%. On the other hand, table A.9-62 reflects overall data throughput for AOC services. The average data throughput for AOC services that are triggered on the RL is 42898,10kpbs. Hence, 42898,10*0,8338=35768,35kbps. Nevertheless these figures yielded are for a scenario with 100A/Cs. There are no specific figures for a scenario of 1 A/C on GROUND. Therefore, as previously stated, an interpolation ought to be made. Paying attention to data for other scenarios, it is clearly appreciable that data estimations grow linear with the number of aircrafts. In conclusion, we can address it, without losing too much accuracy as a linear interpolation. The value deemed for FOQA service in a RAMP arrival scenario with 1 A/C is 35768,35*(1/100)=357,68kbps. As an immediate consequence of this, the average offered load for AOC traffic on the RL will be 0,23+357,68=357,91kbps. Hereafter all data will be recalculated this way and consequently values from tables of [6] properly amended. Finally Table 18 will develop as follows: Table 19: Airport capacity load for small airports (3 operations/hour) considering FOQA as a RAMP service Average offered load ATC (Kbits/sec) Scenario Scenario 19 (1 A/C, 1 VC) Overall © EUROCAE, 20XX 0,0 Average offered load AOC (Kbits/sec) 357,91 87 Average offered load ATC (Kbits/sec) Scenario RAMP arrival with FOQA Scenario 20 (1 A/C, 1 VC) RAMP departure/ ATC,NET,AOC,EFF,UPLIB,Echarts 9.2.1.1.2 Average offered load AOC (Kbits/sec) FL 0,0 0,22 RL 0,0 357,69 Overall 0,04 56,69 FL 0,02 47,64 RL 0,02 9,35 Coverage Requirements for airports with 3 operations/hour AeroMACS deployment at such an airport would be limited to a single BS location using a sectorized antenna (allowing extended cell coverage). Antenna height is determined by airport AeroMACS equipped A/C type (light or medium). There is probably no need for antenna height above 10 m. Existing airport infrastructure shall be used (building structure, tower, antenna towers or light poles) in such a way that all gates or stands are covered as well as all airport areas as defined in this document. Cell sizes should be of the macro cell size (large cells). There is no need for special cell planning studies to determine BS site as terminal infrastructure is likely to be small. Nevertheless – in case AeroMACS installation - the airport authority has to contact ICAO FMG and forward all information as specified under the frequency planning regulations. 9.2.1.1.3 Capacity Requirements for airports with 20 operations/hour Such airport is likely to comply with scenarios 21 & 22 as provided by [6]. In this case data loads are provided assuming that the first half hour 10 A/C are arriving / departing and the next 10 A/C the next 30 minutes. When comparing data needs from these scenarios and the table providing AeroMACS DL (BS) and UL (A/C or MS) supported Data loads, it is clear that also here a single sectorised BS will fulfil data requirements when no FOQA services are considered at the airport. However when FOQA services over AeroMACS would be made available at such airport a second omni-direction cell will be needed operating on a different frequency in order to handle the 3 Mbps data load in UL. Considerations previously made on FOQA service have been taken into account and the table values amended. Table 20: Airport capacity load for small airports (20 operations/hour) Scenario Scenario 21 (10 A/C, 4 VC) Average offered load ATC (Kbits/sec) Average offered load AOC (Kbits/sec) 0,14 3597,55 Overall © EUROCAE, 20XX 88 RAMP arrival with FOQA Scenario 22 (10 A/C, 4 VC) RAMP departure 9.2.1.1.4 FL 0,06 18,32 RL 0,08 3579,23 Overall 0,41 1039,82 (~1 MBit) FL 0,16 902,07 RL 0,24 139,24 Coverage Requirements for airports with 20 operations/hour The same coverage requirements do exist as for the 3 operations per hour. This is because a single BS data throughput can easily handle the required data loads as provided in the table above. Also here macro cell sizes should be deployed. The BS installed shall be deployed in such a way that it will provide the highest data throughput at the RAMP area and hence operation under 64 QAM shall be strived for. It should be mentioned that 64QAM modulation scheme in UL is optional for implementation. In case the terminal infrastructure is straight forward and not too complex there may be no need to rely on dedicated cell planning to optimize BS location. Application of RF rule of thumb, RF and installation requirements from this document as well as cell planning rules may be sufficient for AeroMACS deployment. Nevertheless the airport authority has to contact ICAO FMG and forward all information as specified under the frequency planning regulations. As an RF rule of thumb for establishing LOS conditions at several locations at the airport the 1st FRESNEL zone can be calculated. This calculation will also allow the determination of BS antenna height. For good LOS conditions the maximum obstructions allowed into the beam is 20 to 40% of the first FRESNEL zone. The general equation for calculating Fresnel zones radius at any point P in between the endpoints of the link is the following: where, Fn = the nth Fresnel Zone radius in meters d1 = the distance of P from one end in meters d2 = the distance of P from the other end in meters λ = the wavelength of the transmitted signal in meters © EUROCAE, 20XX 89 Figure 36: FRESNEL zone determination parameters 9.2.1.2 Medium airports (20- 60 mvts/hr) – Parallel or Open V Runways and Linear – Curvilinear Terminals Medium airports may make use of either parallel or open V runway layouts or be based on a mixture of both types. Medium airport is in Europe the largest airport category encountered. Airports such as Geneva, Helsinki, Zagreb, Prague, Paris Le Bourget, Dusseldorf, Hamburg and many others belong to this category. While it was not likely that many small airports will be equipped with AeroMACS, it is foreseen that the medium airport category will be equipped. 9.2.1.2.1 Capacity Requirements for airports with 50 operations/hour Medium airports are likely to comply to scenarios 27, 28, 29, 30, 31, 32 as provided by [6]. Considerations previously made on FOQA service have been taken into account and the table values amended. Moreover, there was a mistaken found on simulations results for scenario 30. FOQA was introduced in that scenario and counted for the overall AOC traffic on the RL. That is completely wrong, and the service is only instantiated in GROUND arrival phase. Therefore it must be removed from the figures. As shown on table A.30-249 of [6], FOQA has a relative volume on the RL of 83,52%. Hence, 5737,92*(1-0,8352)=945,6kbps will be the total amount of traffic for AOC on the RL. Table 21: Airport capacity load for medium airports (50 operations/hour) Scenario Average offered load ATC (Kbits/sec) © EUROCAE, 20XX Average offered load AOC (Kbits/sec) 90 Overall 0,47 9021,26(~9 MBit) FL 0,19 69,42 RL 0,28 8951,84 Overall 1,02 2317,97 (~2,3 MBit) FL 0,41 1992,86 RL 0,60 325,45 Scenario 29 (25 A/C, 10 VC) GROUND arrival without FOQA Overall 1,23 3321,19(~3 MBit) FL 1,14 196,97 RL 0,09 3124,22 Scenario 30 (25 A/C, 10 VC) GROUND departure (FOQA is not executed on departure) Overall 1,05 1041,2 (~1 MBit) FL 0,98 95,58 RL 0,07 945,6 Scenario 31 (25 A/C, 10 VC) TOWER arrival Overall 0,58 141,97 FL 0,57 0,0 RL 0,02 141,97 Overall 0,44 287,38 Scenario 27 (25 A/C, 10 VC) RAMP arrival with FOQA Scenario 28 (25 A/C, 10 VC) RAMP departure Scenario 32 (25 A/C, 10 VC) TOWER departure 9.2.1.2.2 Coverage Requirements for airports with 50 operations/hour Most of the medium sized airports in Europe will likely be using AeroMACS for ATC and AOC operations. As can be seen from the scenarios showed above, it is obvious that a single AeroMACS BS is not any longer able to sustain the needed data throughput. Medium airports should deploy multiple BSs locations to cover all airport areas. Generally it is estimated that 3 BS with 3 sectors each should be able to fulfil all AeroMACS data requirements. However there is not a fixed rule for establishing the amount of BS as deployment is highly depending on the terminal structure and rest of airport layout. As the highest throughputs are needed at RAMP area implementation should provide more capacity in this area. The exact location of the BS shall be determined by an airport cell planning study which will take into account the terminal and airport infrastructure availability for this particular airport. Curvilinear – Satellite terminals may have special needs in case there is no possibility to install BS antenna on a small tower on the roof of such a terminal. In case of small satellite terminals it may be useful to deploy an omni-directional antenna located at a tower installed on top of the roof (if structurally possible). Tower height will be calculated in such a way that the A/C antenna for the A/C types handled at this airport can be reached by the BS antenna under LOS conditions trying to minimalize RF signal diffraction from roof edges. If it is not possible to install BSs on the roof, BSs may be installed on light poles around the terminal area. © EUROCAE, 20XX 91 Linear terminals do not have any particular deployment need and the most probably good installation conditions will be available on light infrastructure installed along the terminal or on a tower when these are within 200 meters of the gates. Nevertheless for every European medium airport, the appropriate cell planning study shall be performed before any deployment can take place. AeroMACS frequency planning shall be coordinated with ICAO FMG. 9.2.1.3 Large airports (60-100mvts/hr) – 3 Runways - 4 Runways and Pier Finger – Linear Curvilinear Terminals Most of the large European airports belong to this airport category. Airports such as Brussels, Paris CDG, Frankfurt, Munich, Milan, Rome, Oslo, Stockholm, Zurich, London Heathrow, Madrid belong to this category. On the terminal site, most of these airports have mixed terminal layouts as most of them are constructed using extensions as part of a historical growth process as airports were not able to be relocated at a completely new site. 9.2.1.3.1 Capacity Requirements for airports with 100 operations/hour Scenarios 3, 4, 5, 6 provided by [6], represent the data load requirements as met at these airports. Considerations previously made on FOQA service have been taken into account and the table values amended. RAMP scenarios data have been taken from Table 53 and Table 54, which refine the original figures adding AOC data traffic Table 22: Airport capacity load for large airports (100 operations/hour) Scenario 50 A/C, 10 VC RAMP arrival 50 A/C, 10 VC RAMP departure Scenario 03 (50 A/C, 10 VC) GROUND arrival without FOQA Scenario 04 (50 A/C, 10 VC) GROUND departure (FOQA is not executed on departure) Scenario 05 TOWER arrival Scenario 06 (50 A/C, 10 VC) TOWER departure Overall average offered load FL (Kbits/sec) Overall average offered load RL (Kbits/sec) 137,53 17355,42 3106,42 496,42 352,47 3418,44 180,93 1807,7 1,08 279,21 0,88 596,12 © EUROCAE, 20XX 92 9.2.1.3.2 Coverage Requirements for airports with 100 operations/hour Even without the heavy AOC services included, it is obvious that multiple sectorised BS’s will need to be installed to handle data requirements. At the RAMP area it is likely that AeroMACS will need to rely on microcells (cell coverage in the order of 200 to 300m diameter – 16 QAM ). As for any cellular system, AeroMACS data throughput can be increased by creating additional cells within the same coverage area. These microcells will emit less power compared macro cells – using lower gain antennas (e.g. 12 dBi), nevertheless the impact on Globalstar interference needs to be addressed properly. Hence microcells will request a more elaborated frequency planning and establishing appropriate cluster and frequency re-use factors will be done during cell planning studies. Nevertheless the airport authority has to contact ICAO FMG and forward all information as specified under the frequency planning regulations. Because the terminal area is often a mixed structure, every airport shall rely on a specific airport cell planning study to optimize BS placement so that all coverage requirements will be met. 9.2.1.4 Very Large airports(>100 mvts/hr) – 4 Runways and more, Pier Finger – Linear - Curvilinear Terminals. Today AMSTERDAM SCHIPHOL is the only airport in Europe handling more than 100 operations per hour handled over 5 runways. 9.2.1.4.1 Capacity Requirements for airports with more than 100 operations/hour Very large airports are likely to comply to scenarios 7, 8, 9, 10, 11 and 12 as provided by [6]. Considerations previously made on FOQA service have been taken into account and the table values amended. Table 23: Airport capacity load for very large airports (more than 100 operations/hour) Average offered load ATC (Kbits/sec) Average offered load AOC (Kbits/sec) Overall 1,91 36079,32 (~36 MBit) FL 0,78 274,27 RL 1,14 35805,05 Overall 3,20 471,62 FL 1,29 408,09 RL 1,91 63,53 Scenario Scenario 07 (100 A/C, 20 VC) RAMP arrival with FOQA Scenario 08 (100 A/C, 20 VC) RAMP departure service exempted8 8 Service exempted means that the really large AOC applications such as EFF, UPLIB, E-CHARTS have not been considered as AOC applications. © EUROCAE, 20XX 93 Overall 4,53 7840,33 (~8 MBit) FL 4,19 710,03 RL 0,34 7130,3 Scenario 10 (100 A/C, 20 VC) GROUND departure (FOQA is not executed on departure) Overall 3,52 3420,58 (~3,5 MBit) FL 3,28 312,77 RL 0,24 3107,81 Scenario 11 (100 A/C, 20 VC) TOWER arrival services exempted Overall 2,17 538,39 FL 2,11 0,0 RL 0,06 538,39 Overall 1,55 1019,44 (~1 MBit) Scenario 09 (100 A/C, 20 VC) GROUND arrival Scenario 12 (100 A/C, 20 VC) TOWER departure 9.2.1.4.2 Coverage Requirements for airports with more than 100 operations/hour Very large airports will have identical coverage requirements as large airports around terminal areas. For GROUND and TOWER areas there may be a need to add one or two additional sectorized BSs to cover all 5 runways with accompanying taxiways. © EUROCAE, 20XX 94 CHAPTER 10 SYSTEM INTEROPERABILITY 10.1 Multi-vendor Interoperability The network reference model aimed to support AeroMACS access network and its interconnection to the backbone has been previously depicted in section 2.1. Sticking to profile C of Wimax Architecture, AeroMACS BSs interoperability SHALL be guaranteed through R6 interface. Note: WMF only focus on R1 interface to guarantee for interoperability. Infrastructure interoperability has not been considered by the WMF. Therefore R6 is not in the scope of WMF certification engagement. The architecture SHOULD support interoperability between equipment from different manufacturers within an ASN and across ASNs. Such interoperability SHALL include: • BS and backhaul equipment within an ASN. • The architecture SHALL support common functionalities according to what is currently stated down below as requirements between BSs and between BS and ASN-GW from different manufacturers. As noted, these are not addressed issues and for the time being they’re not going to be addressed. The BS SHALL offer an interoperable interface with an ASN-GW. Besides, all interfaces to core equipment SHALL be performed through R3 interface (as stated on section 3.2). Protocols and procedures for R3 as well as R6 are drawn in [32]. As mandated on this WiMAX Forum document, GRE SHALL be used as the tunneling protocol for the data plane over R6. GRE is an IP-in-IP tunnel. The granularity of this tunnel SHALL be one tunnel per Service Flow (SF). It’s important to get straight with the granularity issue in order to solve out interoperability. This is left to implementation. In this case, all control resides in the ASN-GW. Packet forwarding in the downlink: ASN-GW has to map incoming traffic from the backbone to a corresponding data path. The protocol has a KEY option that should be applied for provisioning Data Path ID of the tunnel. When a packet destined for an MS arrives, it looks at the IPv4/IPv6 packet header and/or flow ID to determine the service flow ID (SFID) that this packet needs to be mapped on to. The SFID maps to a data path ID. The ASN-GW uses the GRE key associated with the data path ID to forward the IP packet via the GRE tunnel to the BS. IP packets are extracted in the BS out of the GRE packet and forwarded over R1 to the MS. Packet forwarding in the uplink: The way back is equivalent to the one described previously. IP datagrams going upstream over R1 are encapsulated in the BS as user payload in GRE packets and transferred over R6 to the ASN-GW. GRE is not so much meaningful in terms of security because all of R6 bearer message can be attracted without any protection due to GRE protocol but rather is used to differentiate each SF between ASN-GW and BS using a unique GRE key value. Every SF has each different GRE key value. This should be the main concern when validating multivendor interoperability, BS implementation of GRE protocol. One advantage of GRE encapsulation is that it allows multiple IP hops to be encapsulated without any need for routing. All packets are de-capsulated at ASN-GW and layer-2 communication is established between CPE and ASN-GW. © EUROCAE, 20XX 95 The required R6 messages in order to support interoperability are described in [31] as follows: On the BS side: It SHALL support Data path registration type1. Data_Path info IE: Data Path Encapsulation Type: GRE Data Path ID: GRE Key Data Path Type: type 1 Operation ID IE: Data Path registration It SHALL support Data path de-registration for triggering MS network exit. Operation ID IE: Data Path De-registration It SHALL support HO preparation Trigger source IE: 16e[schlereth11] function entity (RRC and NRM dismissed) HO optimization IE: enabled or disabled? It’s a flag that may skip some phases of network re-entry during HO process. i.e SBC REQ/RSP, REG REQ/RSP PKM-TEK. It SHALL support HO action. It SHALL support HO cancellation. It SHALL support HO rejection. It SHALL perform Authentication Relay. BS SHALL forward EAP messages over R6 to the ASN-GW Authenticator with the ASN control data plane protocol. It SHALL support AK transfer primitives and key reception. It SHALL support NSP id list. It SHALL implement the Context functionality. On the ASN-GW side: It SHALL perform Authentication and key distribution ASN-GW SHALL forward EAP messages over R3 to the AAA server with the RADIUS protocol. It SHALL support Network Entry signaling. It SHALL support Proxy MIPv4 Client. It SHALL support MIP registration revocation. It SHALL support DHCPv4 Proxy/Relay. It SHOULD support MIPv6 Access Router. It SHALL support Service Flow Authorization. Policies are pulled from external AAA. Therefore it SHALL implement a AAA client. It SHALL support Data path registration type1. It SHALL support Data path deregistration for triggering MS network exit. It SHALL support HO preparation. SBC context IE in case the field HO_optimization is enabled. Thus no new capabilities are negotiated with the target BS and the ASN-GW has to forward the ones of the serving BS. AK context retrieval to the target BS. © EUROCAE, 20XX 96 It SHALL support HO action. It SHALL support HO cancellation. It SHALL support HO rejection. It SHALL support Context transfer. This is related to the notification to the ASN-GW of security policy that is foreseeable to be used by the MS entering the network. It SHALL support CMAC key count update. Upon successful completion of Authentication, the Authenticator (in our case the AAA server) sets the count for the MS to 1. © EUROCAE, 20XX 97 CHAPTER 11 INTERFERENCE The following material on interference issues related to AeroMACS is mainly an excerpt of SESAR Project P15.2.7 deliverable [10]. In addition material on MSS interference analysis worked out by a subgroup of RTCA SC-223 in collaboration with EUROCAE WG-82 [43] is summarized in section 11.4, which provides guidance with respect to the maximum tolerable power levels for implementation of AeroMACS. Within SESAR Project P15.2.7 an assessment of potential coexistence problems between AeroMACS and other systems operating in the same or in adjacent frequency bands was made. The assessment included IEEE802.11a systems (i.e. Radio Local Access Networks - RLANs) operating in the 5150-5350 MHz band, BBDR (Broadband Disaster Relief) systems, MLS (Microwave Landing Systems) and AMT (Aeronautical Mobile services for Telemetry). The main conclusions from the assessment are that: • • • MLS transmitters may cause harmful interference to AeroMACS receivers when installed at the same airport, even when the two systems are separated in frequency by several tens of MHz. AeroMACS transmitters may also prevent MLS operation. AMT transmissions from aircraft may cause harmful interference to AeroMACS receivers due to their high transmit powers. It is unlikely that other terrestrial systems will cause coexistence problems for AeroMACS. Hence, coordination between the administrations operating AeroMACS, MLS and/or AMT systems is required. 11.1 Regulatory Aspects While the 5091-5150 MHz band has been assigned to Aviation as primary user, the same band is also co-allocated to non-geostationary LEO satellite operators (e.g., Globalstar feeder links) and aeronautical mobile telemetry (AMT) as co-primary users. ITU-R requires therefore that AeroMACS and any additional future aviation service such as telemetry (AMT) or Aeronautical security (AS) limits the total aggregated power flux density (pfd) at the satellite receiver to increasing the satellite receiver Noise temperature ( ∆T/T) by no more than 3% at any orbit point and within the LEO satellite antenna’s footprint. 11.1.1 AMT The AMT system is used for real-time analysis and visualization of data during flight tests. The 5091-5150 MHz band was allocated to AMT for transmission from aircraft to ground at WRC-07, and adds to a list of frequency bands allocated to AMT. In Table 14, the different frequency bands are listed [20]. In Area 1 (Europe + Africa) it is also possible to use the frequency band 5150-5250 MHz. Table 24: Telemetry frequency allocations (USA) [20] Frequency range [MHz] Primary/secondary Comments 1435-1525 Primary 1525-1535 Secondary Mobile satellite service (MSS) primary service 2200-2290 Co-primary Co-primary service in USA © EUROCAE, 20XX 98 2310-2360 Secondary Wireless Communication Service (WCS) and broadcastingsatellite (sound) service (BSS) primary 2360-2395 Primary 4400-4940 - Telemetry allowed under the mobile service allocation 5091-5150 - Inclusion into NTIA Table of Frequency Allocation not yet completed. 5925-6700 - Inclusion into NTIA Table of Frequency Allocation not yet completed. The main challenge concerning AMT and AeroMACS is that AMT may interfere with AeroMACS. It is considered less safety critical that AeroMACS may interfere with AMT operations. According to Annex 1 to Resolution 418 (WRC-07), certain conditions apply to the implementation of AMT: • • • • The operation of AMT systems shall be coordinated with administrations operating MLS systems within a certain defined distance from the AMT flight area. For the protection of FSS systems, the increase in equivalent noise temperature in the satellites due to AMT transmissions shall not exceed 1 %. For the protection of mobile services in the 5150-5250 MHz frequency band, the maximum power-flux-density at the Earth surface shall not exceed -79 2 dB(W/(m ·20 MHz))-Gr(θ), where Gr(θ) represents the mobile service receiver antenna gain as function of elevation angle. For the protection of aeronautical mobile (R) service (AM(R)S) in the frequency band 5091-5150 MHz, maximum power flux density at the Earth surface 2 produced by AMT emissions shall not exceed -89.4 dB(W/(m ·20 MHz))-Gr(θ),(θ), where Gr(θ) represents the AeroMACS mobile receiver antenna gain as function of elevation angle. The maximum antenna gain is set to 6 dBi. Hence, the last bullet point relates to AeroMACS and the protection of AeroMACS mobile receivers. 11.1.2 MSS The apportioned RFI allowance due to AeroMACS and AS shall be limited to 2 %. This allows for fulfilling the ITU requirement of increase of satellite receiver Noise temperature ( ∆T/T) by no more than 3% taking into account 1 % contribution by AMT . 11.2 Impact of Out of Band Interference on Deployment (MLS) The MLS signal use Time Division Multiplexing (TDM) including azimuth and elevation signals. These signals are Continuous Wave (CW) with DPSK preambles with 3 dB bandwidth of 15.626 kHz. It is the preambles that may interfere with other systems and notably AeroMACS due to its low out-of-band attenuation. 11.2.1 Separation requirements In [19], the minimum distance between a MLS transmitter and an AeroMACS receiver with antenna gain 4 dBi as function of frequency offset was estimated. The figure is included below for convenience. © EUROCAE, 20XX 99 Minimum distance to interferer [m] 2000 1500 1000 500 0 5 10 15 20 25 30 Frequency off-set [MHz] 35 40 Figure 37: Minimum distance between MLS transmitter and AeroMACS receiver [19] The minimum distance is reduced as the frequency offset increases. An offset of 10 MHz leads to a minimum distance of 800 meters, while an offset of 40 MHz leads to a minimum distance of 200-250 meters. 11.2.2 Impact on AeroMACS deployment The impact of MLS on AeroMACS deployment will depend on the number of airports having operational MLS. In order to operate both MLS and AeroMACS at an airport, bilateral coordination between the two systems is necessary. This coordination must include: Allocation of MLS frequency channels to European airports should facilitate operation of AeroMACS systems. At large airports, at which it is likely to deploy a multi-cell AeroMACS network, allocation of MLS channels should be in the lower part of the 5030-5091 MHz band. The AeroMACS system may be forced to avoid the frequency channels closest to the MLS channels. The cell planning of an AeroMACS network must take into account the location of MLS ground equipment, and perhaps also the approach routes so that a base station antenna is not directed directly towards approaching flights. 11.3 Impact of In Band Interference on Deployment (AMT) 11.3.1 Utilisation of AMT on 5 GHz by Airbus The Airbus telemetry department uses three downlink channels to transfer data from aircraft to ground stations. These channels allow monitoring directly the aircraft data from the ground. A reason why the 5091-5150 MHz band was allocated to AMT at WRC-07 is jamming problems in the S-band. Currently, two frequency slots are available at S-band and Cband. From 2014 onwards, only the C-band will be used. According to AMT Airbus service, the following four 8 MHz channels have been allocated to AMT by the French telecom regulation authorities ANFR (centre frequencies): • 5126 MHz • 5135 MHz • 5144 MHz © EUROCAE, 20XX 100 • 5153 MHz Except 5153 MHz all other channels are within the AeroMACS band. The Airbus system is able to track three aircraft on three different frequencies anywhere above France. Nine receiving antennas are placed at five strategic points to realise this coverage: • 4 antennas in Toulouse • 1 antenna in Martigues • 2 antennas in Bordeaux • 1 antenna in Saint-Nazaire • 1 antenna in Tarbes The figure below presents the coverage of the terrestrial AMT antennas in reception. The circles drawn in the figure give an idea of the optical coverage for each reception antenna. These circles do not take into account the S/N required in reception (15dB) and the power emitted by the aircraft antennas. The smallest circles represent an altitude of 3 km and the largest circles an altitude of 10 km. © EUROCAE, 20XX 101 FIGURE 38: RECEPTION ANTENNA COVERAGE (20000 FT) Note: Tarbes AMT station coverage is not represented. The AMT station has a limited coverage of 20Nm around Tarbes Airport Several modulation types are defined for telemetry systems in [20]: • Frequency Modulation (FM) and Phase Modulation (PM) – traditional methods • Pulse Code Modulation/Frequency Modulation (PCM/FM) – most popular since the 1970s • Feher Patented Quadrature Phase Shifting (FQPSK) • Shaped Offset Quadrature Phase Modulation (SOQPSK) © EUROCAE, 20XX 102 • Advanced Range Telemetry (ARTM) Continuous Phase Modulation (CPM) In the table below, characteristics of the Airbus AMT system are listed. These characteristics have been selected to obtain good operational conditions. Table 25: AMT characteristics Channel bandwidth 4 x 8 MHz Modulation Single Carrier-SOQPSK or COFDM-QPSK Emitted Power 10 W Aircraft antennas One antenna on the bottom of the aircraft and another antenna on the top of the aircraft Gain: 0 dBi Cable loss 2 dB Steering Parabolic antenna Ground antenna 2.4 m diameter Throughput expected 20 Mbps downlink Deployment Tests aircraft (16 to 25 aircraft for Airbus), but maximum 3 in flight at the same time Coverage area France To resolve jamming issues, COFDM adaptive modulation has been selected. The selected transmit power is 10 W, although 20 W is an option. The width of the channels allows conveying all the traffic with good performances. 11.3.2 Separation requirements The maximum transmit power for AMT is 20 W per transmitter with 8 MHz bandwidth, and the typical number of transmitters on an aircraft is 2. As one antenna is located on top of the aircraft and the other one underneath the aircraft, it is assumed that only one of the two antennas will emit energy in the direction of an AeroMACS installation at any time. With 0 dBi AMT antennas, the maximum EIRP is then 38 dBm over 8 MHz or 36 dBm over 5 MHz assuming 10 W transmit power and 2 dB cable loss. The interference threshold for AeroMACS receivers is derived in [19]. Assuming noise factor dB and setting the interference margin to 3 dB, the following is obtained: • Thermal noise: dBm (effective bandwidth MHz) • • Interference threshold • The AeroMACS base station antenna gain including cable loss is assumed to be 13 dBi. Hence, the attenuation of the AMT signal in the AeroMACS system's © EUROCAE, 20XX dBm 103 frequency channel due to separation in space and frequency should at least be in the order of 36-(-100.1-13) ≈ 149 dB, assuming the worst case that the AMT transmitter is located within the main beam of the AeroMACS antenna. The main beam of the AeroMACS BS antenna is generally close to horizontal to cover the airport surface. It is reasonable to assume that the distance to the AMT transmitter is shortest when the test aircraft is close to the ground. Hence, there is a risk that an interfering source will be within the main beam of the receive antenna when the distance is the shortest. When the interfering signal's bandwidth is non-overlapping with the receive filters of the receiver, the total interference level depends on: • The level of the interfering signal within the receiver filter's bandwidth • The receive filter's attenuation within the interfering signal's bandwidth First, the case where all interference is entering the receive bandwidth is considered. In Figure 39, the minimum spatial separation distance between an AMT transmitter and an AeroMACS base station and mobile station is illustrated as function of the spectral isolation. 80 AeroMACS BS receiver AeroMACS A/C receiver 70 Spectral isolation [dB] 60 50 40 30 20 10 0 1 10 10 2 3 4 10 10 Minimum separation [m] 10 5 10 6 Figure 39: Minimum spatial separation as function of spectral isolation. Total isolation is 154 dB. If the AMT transmitter operates on the same frequency as an AeroMACS receiver, there is no spectral isolation. In this case and assuming free space path loss, there should not be any AMT transmissions closer to an AeroMACS base station than 132 km. For AeroMACS A/C receivers, the minimum distance is 59 km. Typical transmission masks of AMT signals are not available, but generally the spectral isolation will be between 50 dB and 80 dB at a distance from the centre frequency equal to or greater than the signal bandwidth. Assuming 50 dB spectral isolation, additional 99 dB attenuation can be obtained by about 418 meter spatial separation (assuming free space path loss). If however the spectral isolation can be © EUROCAE, 20XX 104 increased to 80 dB, the additional 74 dB attenuation can be obtained by about 13 meter separation in space. Considering the interference entering the receiver within the AMT bandwidth, the receive filters at radio frequencies (RF), intermediate frequencies (IF) and baseband together should assure that the interference level becomes well below the interference threshold. A similar analysis can be done as above for the case of interference level within the receive bandwidth. If the interference levels within both the AMT transmit band and the AeroMACS receive filters' band are of similar magnitude, it is important the sum of the two is below the interference threshold. In this analysis, 3rd order inter-modulation products (IMP) is not included, as it is assumed that it will be of less importance. The same is the case for signal distortion due to saturation in the receive amplifier. 11.3.3 Impact on AeroMACS deployment The calculations above indicate that AMT systems operating in the 5091-5150 MHz band may pose a problem for AeroMACS in Europe. Airbus currently operates three 8 MHz channels, which will overlap with at least 5 AeroMACS channels if they are all using the 5091-5150 MHz band. In particular large airports will probably have multiple AeroMACS cells occupying several or all of the eleven available 5 MHz channels. As the minimum separation distance for co-channel AMT transmitters and AeroMACS receivers is over 100 km, and the AMT coverage is the airspace over France, coexistence issues affecting all airports in France will arise. Coordination between AMT systems and AeroMACS systems will therefore be required. It should be noted that the restrictions on AMT from WRC-07, keeping the power flux at the surface of the Earth where AeroMACS can be deployed lower than density 89.4 dB (W/(m2·20MHz)) with isotropic ground antenna, corresponds to an interference level of: dBm, assuming that two 8 MHz AMT channels are active simultaneously within the 20 MHz. Hence, the flux density requirement from WRC-07 corresponds to the interference threshold derived in this project. For an AMT transmitter with transmit power 10 W to comply with the requirements, the minimum altitude should be: meters Hence, according to WRC-07, either AMT transmitters should be turned off in the vicinity of areas where AeroMACS is deployed, or the transmit power should be reduced. 11.4 MSS Interference Analysis for AeroMACS A subgroup of RTCA SC-223 lead by ITT Exelis in collaboration with EUROCAE WG82 and SESAR P15.2.7 defined a working method of specifying emissions from all expected AeroMACS future deployments that are compliant with ITU co-interference requirements, to establish 2-way link levels with the aircraft to ensure communication service provision through the RF-link without adversely affecting the Global Star Satellite feeder links. The following material is an excerpt of a working paper presented at ACP WG-S in July 2013 [43]. The threshold interference power level for Globalstar at low earth orbit (LEO) has been established at -157,3 dBW corresponding to 2% increase of the satellite receiver’s noise temperature as outlined in section 11.1.2. © EUROCAE, 20XX 105 In order to establish power limits for AeroMACS base station transmitters to avoid interference with Globalstar uplinks, base stations with sector antenna transmitters were modelled at 6207 airports in the United States, Europe and the rest of the world. The following assumptions have been applied related to large, medium and small size category airports: Large size airports: US categories: 35 Operational Evolution Partnership airports (OEP 35) [45] Europe: 50 largest European airports according to Wikipedia list [46] Medium size airports: 123 US category Class C airports Europe: 50 medium category airports according to Wikipedia list rank 51 to 100 Small size airports: All other airports in Openflights database [44] In the model, each large airport is assigned six 120° sector antennas, each medium airports is assigned three 120° sector antennas and each small airport is assigned one 120° sector antenna. Several simulation runs were applied with different random antenna directions. This is equivalent to assume horizontal omni-directional station pattern as a mean. It is assumed that large airports will use all eleven 5 MHz channels, medium airports will use six 5 MHz channels and small airports will use one 5 MHz channel. Small airports are only allowed transmitting half as much power per sector as the medium and large airports. This takes into account that at smaller sites it is expected that AeroMACS is not permanently running. Finally the following assumptions for EIRP, MIMO system and antenna pattern have been applied: • Effective isotropic Radiated Power (EIRP) is the sector transmit power at the antenna input plus antenna gain, • Maximum allowable EIRP in a base station sector shall be the sum of both transmit power amplifiers in a 2-channel MIMO system, • Base Station Sector patterns are defined to be ITU-R-F-1336-2 reference patterns with 120° 3 dB beam width toward Horizon (see Figure 40Figure 40). © EUROCAE, 20XX 106 Figure 40: ITU-R-F-1336-2 reference antenna patterns and mask [43] © EUROCAE, 20XX 107 Based on the analysis it is recommended that deployment of AeroMACS base stations observe the following emissions limitations: The total base station EIRP in a sector should not exceed: • 39.4 dBm for elevation angles up to 1.5 degrees • 39.4 dBm linearly decreasing (in dB) to 24.4 dBm for elevation angles from 1.5 to 7.5 degrees • 24.4 dBm linearly decreasing (in dB) to 19.4 dBm for elevation angles from 7.5 to 27.5 degrees • 19.4 dBm linearly decreasing (in dB) to 11.4 dBm for elevation angles from 27.5 to 90 degrees In addition the following requirement for the mobile stations is applied: The total mobile station EIRP shall not exceed 30 dBm These limitations include the following assumptions: (a) EIRP is defined as antenna gain in a specified elevation direction plus the average AeroMACS transmitter power. While the instantaneous peak power from a given transmitter may exceed that level when all of the subcarriers randomly align in phase, when the large number of transmitters assumed in the analysis is taken into account, average power is the appropriate metric. (b) The breakpoints in the base station EIRP mask are consistent with the elevation pattern of a +15 dBi peak, 120 degree sector antenna as contained in ITU-R F.1336-2. (c) If a station sector contains multiple transmit antennas on the same frequency (e.g., MIMO), the specified power limit is the sum of the power from each antenna. (d) No base station antenna down-tilt is applied in these assumptions. Higher sector average transmit power may meet these limitations if antenna pattern down-tilt is used. (f) Mobile station EIRP is based on full occupancy of transmit sub-carriers for 5 MHz bandwidth 11.5 Potential Future Interference Sources Another major potential interference source is the Control and Non Payload communication (CNPC) for Unmanned Aircraft Systems (UAS). In that context discussion at the time of publication of the present document is about one satellite and one terrestrial link for CNPC services within the MLS band 5030 to 5091 MHz. It is recommended to follow the discussion on these proposals as interference between CNPC communications in the MLS band and AeroMACS is very likely, which would require appropriate interference planning activities to be initiated. © EUROCAE, 20XX 108 CHAPTER 12 RF Cell Dimensioning and Planning 12.1 RF Cell Dimensioning The scope of this section and thus through the RF simulations is: • Generic guidelines for simulations made with a RF tool. • Description of the setup of the scenarios simulated. • Designing considerations that will be addressed for the scenarios are: • Determine cell density required for a desired level of service, performance, and coverage. • Illustrate the effect of frequency, power, terrain, clutter and CPE location on that coverage. • Determine expected point-to-point link performance using an analytical path loss model. • LOS and NLOS Maximum Allowable Path Loss (MAPL) based on system parameters. • Determine power settings and receiver sensitivities. • Channel bandwidth and frequency raster. • Deem antenna gains. • Fading model to be used. • Determine site selection criteria over Barajas and Toulouse layouts. All the simulations of this section have been computed with HTZ Warfare tool (an ICS Telecom software based from ATDI Company). Maps from Toulouse and Barajas have been provided in order to perform simulations with the tool for the two airports. A description of the main parameters of the Radio planning tool can be found in AeroMACS Deployment Case StudiesAPPENDIX D: AeroMACS Deployment Case Studies. 12.1.1 Coverage analysis The objective of this section is to specify link budget for different airport areas to be used during radio planning, derived from [7] channel models and allowed output power levels. The objective of this sub-section is to appreciate the difference which may occur between statistical models and determinist models, which take into account real airport maps (DTM), environment (buildings), co-site situations (co-channel or interferences). Thus LOS and NLOS propagation are differentiated in a real situation, taking into account multipath propagation as well. For this purpose, a deterministic model was used, combining ITU-R P.525 for LOS (Line Of Sight) loss, Deygout 94 method for diffraction loss (when the LOS is obstructed) and Standard for nLOS (near LOS) loss (when the 1st Fresnel zone is obstructed but that the LOS is clear). This propagation model takes also into account multipath effect. The deterministic models make use of the laws governing electromagnetic wave propagation to determine the received signal power at a particular location. They require a 3-D map of the propagation environment: the more compatible the accuracy of the cartography with a certain technology to simulate, the better the coverage accuracy (for a given set of technical parameters for the Best Stations / Terminals / Mobile Stations). Typical examples are the ITU-R P.525/526 models, used with appropriate additional propagation effects (diffraction, sub-path attenuation, ray tracing). Attenuation associated to the signal strength received at each pixel will be attenuated based upon the selected diffraction model. A fully deterministic propagation model might be limited for technologies using high frequencies, where each above the © EUROCAE, 20XX 109 ground feature can become a physical obstacle to the propagation of the signal (diffraction, absorption…). 12.1.1.1 Definition of propagation media Propagation aspects can be divided in three different parts: • LOS propagation (Line Of Sight): The transmitter and the receiver are in visibility one with each other. The propagation in LOS is based upon clearly defined propagation methods, such as the ITU-R P.525 model. Note that in ICS Telecom, taking full advantage of the quality of the cartography loaded, deterministic propagation models, have proved to give the best correlation when correlated with on-field measurements. Of course, additional effects, such as attenuations due to the rain or atmosphere are also considered. • NLOS propagation (NON Line Of Sight): The transmitter and the receiver are not in visibility with each other. A typical example is a WiMAX BS located in Outdoor environment, when the MS is located inside a building. The signal between the BS and the MS is then diffracted, diffused, or both. ICS telecom features a new cartographic layer, called the building file that describes the building height above ground level. In ICS telecom, the Digital Terrain Model is now separated from the above-the-ground features (buildings, trees…). • nLOS propagation(near Line Of Sight): This case is a mix between the LOS and the NLOS case. The transmitter and the receiver can be for instance in visibility with each other, but part of the Fresnel ellipsoid is obstructed. 12.1.1.2 Diffraction effect The diffraction models in ICS telecom do quantify the losses due to obstacles between the BS and the MS, avoiding the two entities to be in Line of Sight one with each other. 12.1.1.3 Sub-path attenuation effect The sub-path model in ICS telecom quantifies the losses due partial obstructions of the Fresnel zone. Such an attenuation term can be defined for partial obstruction in the Z axis only, or in full 3D. 12.1.1.4 Multi-reflection effect This model calculates the field strength at all point of the simulation area according to reflected signals contribution, taking into account a reflection coefficient defined by the user. 12.1.1.5 AeroMACS Link Budget A link budget provides a static RF coverage calculation taking into account all parameters which determine such a range, including modulation schemes and FEC. LOS range estimations are based on free space model and AWGN conditions while NLOS ranges are based on DLR MUNICH NLOS model [26]. © EUROCAE, 20XX 110 Because in AeroMACS, the DL and UL operate with different amount of data carriers (sub-channels) under PUSC configuration, a short description is provided on subchannelization. While in the DL all datacarriers are used simultaneously to download data to all MS attached to this particular BS in the UL the MS has only a limited amount of sub carriers available whenever a BS is serving multiple MSs at the same time. 12.1.1.5.1 Free space model Both free space and NLOS MUNICH pathloss models have been calculated in the spreadsheet. The mathematical formula for free space model and AWGN operating conditions corresponds to: Lp = -32,4-20LOG(f (MHz))-20LOG(d (km)) 12.1.1.5.2 DLR MUNICH NLOS model As kind of worst case scenario the cell coverage distance has also been calculated using the DLR MUNICH NLOS model used within SANDRA [26]. The mathematical expression for this model corresponds to: Lp = A + 10µlog(d) with A = 49,3dB and µ = 2,5 12.1.1.5.3 Airport Model Comparison Both of the models defined above have been used in the link budget as they present the best (free space) as well as the worst channel model (DLR MUNICH NLOS) from all airport channel models developed. The following models (the last 3 typical for airports) have been developed under various projects: 1. Free space model 2. MATOLAK(FAA / USA) or US(LOS) 3. D02.1 (Sesar P15.2.7 channel modelling) or BS1MR1 and BS2MR2 4. DLR MUNICH NLOS 9 A comparison can be found between all 4 models in Figure 41 . 9 DLR (NLOS) is equivalent to DLR MUNICH NLOS © EUROCAE, 20XX 111 Figure 41: Comparison of airport pathloss models Numerical values for free space and NLOS MUNICH coverage ranges can be found in the accompanying spreadsheets of the link budget below. BS1MR1 and BS2MR1 are related to two different MS routes as explained in Appendix C. 12.1.1.5.4 Downlink PUSC Subcarriers are grouped into clusters of 14 contiguous sub-carriers per symbol. A subchannel is a group of two clusters. A slot is one sub-channel over two OFDM symbols. The sub-channels in a DL PUSC zone can also be mapped into larger groups called segments. There can be up to three segments created from these larger sub-channel groupings. It should be mentioned that parameters shown are not minimum requirements (e.g. antenna gain). These values have been considered as realistic at time of simulation investigations and might vary in the future dependent on equipment available. © EUROCAE, 20XX 112 WIMAX IEEE802.e LINKBUDGET FOR THE DOWNLINK (5 MHz Bandwidth) Modulation Scheme Link Direction TX Parameters # of antenna elements TX Power per Antenna Element Maximum TX Antenna Gain Tx Cable loss TX EiRP # of occupied sub-carriers NFFT Window size TX EIRP per sub-carrier QPSK 1/2 DL (CC) DL (CTC) 16QAM 1/2 DL (CC) DL (CTC) 64 QAM 1/2 DL (CC) DL (CTC) Unit dBm dBi dB dBm dBm 1 23,00 15,00 3,00 35,00 420 512 8,77 1 23,00 15,00 3,00 35,00 420 512 8,77 1 23,00 15,00 3,00 35,00 420 512 8,77 1 23,00 15,00 3,00 35,00 420 512 8,77 1 23,00 15,00 3,00 35,00 420 512 8,77 1 23,00 15,00 3,00 35,00 420 512 8,77 5,00 5,00 10,94 2,90 5,00 10,94 11,00 5,00 10,94 8,60 5,00 10,94 16,00 5,00 10,94 13,80 5,00 10,94 5120 5120 5120 5120 5120 5120 1 3 3 0 0 0 1 3 3 0 0 0 1 3 3 0 0 0 1 3 3 0 0 0 1 3 3 0 0 0 1 3 3 0 0 0 6 1,8 -174 7 8,8 6 1,8 -174 7 8,8 6 1,8 -174 7 8,8 6 1,8 -174 7 8,8 6 1,8 -174 7 8,8 6 1,8 -174 7 8,8 -118,8 -92,6 -120,9 -94,7 -112,8 -86,6 -115,2 -89,0 -107,8 -81,6 -110,0 -83,8 System Parameters Required SNR Bandwidth sub-carrier spacing Transmit upper Frequency dB MHz kHz MHz Margins Non-orthogonality Margin Inter-cell Interference Margin Implementation Margin Safety Margin Banking Loss Margin RX Antenna Diversity Gain dB dB dB dB dB dB RX Parameters Maximum RX Antenna Gain Rx Cable loss Thermal Noise Density@290K Receiver Noise Figure Composite Noise Figure dBi dB dBm/Hz dB dB RX Sensitivity (per sub-carrier) RX Sensitivity (composite) dBm dBm Maximum Allowable Path Loss free space LOS NLOS MUNICH dB 127,6 129,7 11190,94 14251,70 1352,36 1640,94 121,6 5608,76 778,20 Table 26: DL Link Budget 12.1.1.5.5 UPLINK PUSC © EUROCAE, 20XX 124,0 7393,78 970,72 116,6 3154,04 491,01 118,8 4063,19 601,30 113 For UL PUSC zone type, four contiguous subcarriers are grouped over three symbols. This grouping is called a tile. Six tiles make a sub-channel. For the UL PUSC, the slot is defined as one sub-channel that occurs over the three symbols. Pilots are incorporated within the slot, their position changing with each symbol. Over the course of one tile, one in three subcarriers is a pilot. Slot time PILOT DATA PILOT DATA DATA DATA DATA DATA DATA PILOT DATA PILOT Freq carriers Figure 42: Graphical presentation of Tile in UL-PUSC zone ; Slot = 6 tiles over 3 Symbols Mobile WiMAX implements “uplink sub-channelization” which allows the user to transmit over a limited number of sub-carriers (X * 24) thereby boosting the transmit power as the power spectral density is focused on a limited set of sub-carriers. While sub-channelization increases the cell coverage it decreases the data throughput for this user as the number of subcarriers assigned to him has been reduced. © EUROCAE, 20XX 114 WIMAX IEEE802.e LINKBUDGET FOR THE UPLINK (5 MHz Bandw idth) Modulation Scheme QPSK 1/2 QPSK 1/2 16QAM 1/2 64QAM 1/2 64QAM 1/2 64QAM 1/2 Link Direction UL (CC) UL (CTC) UL (CC) UL (CTC) UL (CC) UL (CTC) TX Parameters Unit # of antenna elements 1 1 1 1 1 1 TX Pow er per Antenna Element dBm 21,00 21,00 21,00 21,00 21,00 21,00 Maximum TX Antenna Gain dBi 6,00 6,00 6,00 6,00 6,00 6,00 Tx Cable loss dB 1,80 1,80 1,80 1,80 1,80 1,80 TX EiRP dBm 25,20 25,20 25,20 25,20 25,20 25,20 # of occupied sub-carriers 24 24 24 24 24 24 NusedsubCh UL 1 1 1 1 1 1 NSubChUL 17 17 17 17 17 17 NFTT Window size 512 512 512 512 512 512 TX EIRP per sub-carrier dBm 11,40 11,40 11,40 11,40 11,40 11,40 System Parameters Required SNR Bandw idth sub-carrier spacing Uplink Sub-Channelization Gain Transmit upper Frequency dB MHz kHz dB MHz 5,00 5,00 10,94 12,3 5120 2,90 5,00 10,94 12,3 5120 10,50 5,00 10,94 12,3 5120 8,60 5,00 10,94 12,3 5120 16,00 5,00 10,94 12,3 5120 13,80 5,00 10,94 12,3 5120 Margins Non-orthogonality Margin Implementation Margin Safety Margin Banking Loss Margin RX Antenna Diversity Gain dB dB dB dB dB 0 5 0 0 0 0 5 0 0 0 0 5 0 0 0 0 5 0 0 0 0 5 0 0 0 0 5 0 0 0 RX Parameters Maximum RX Antenna Gain Rx Cable loss Thermal Noise Density@290K Receiver Noise Figure Composite Noise Figure dBi dB dBm/Hz dB dB 15 3 -174 8 11 15 3 -174 8 11 15 3 -174 8 11 15 3 -174 8 11 15 3 -174 8 11 15 3 -174 8 11 RX Sensitivity (per sub-carrier) dBm RX Sensitivity (per sub-carrier) w ithout subcahnnelization gain dBm RX Sensitivity (composite) dBm -109,9 -112,0 -104,4 -106,3 -98,9 -101,1 -97,6 -96,1 -99,7 -98,2 -92,1 -90,6 -94,0 -92,5 -86,6 -85,1 -88,8 -87,3 Maximum Allow able Path Loss dB Maximum Allow able Path Loss dB w ithout Sub-Channelization m free space LOS N LOS M UN IC H m 121,3 123,4 115,8 117,7 110,3 112,5 109,01 5440,14 759 111,11 6928,04 921 103,51 2888,09 458 105,41 3594,27 545 98,01 1533,24 276 100,21 1975,20 338 © EUROCAE, 20XX 115 Table 27: UL Link Budget 12.1.1.6 Building loss estimation (indoor communication) In some cases (sector antenna radiating perpendicular on buildings and having beam elevation angle not radiating over the building) it may be possible to take into account building losses in order to decrease interference levels with Globalstar. NOTE: The values provided have been obtained for indoor communication and may give an idea on generic value estimations for different materials. However for outdoor communication, values need to build in a safety factor of 3 to 6 dB. Table 28: Wall attenuation values Frequency GHz Loss for Thin walls dB Loss for Thick walls Concrete dB 2 3,3 10,9 3,5 3,4 11,4 5 3,4 11,8 NOTE: Because airport terminal very often include extremely large glass surfaces the attenuation loss for windows can be found in table beneath. Table 29: Window attenuation values Frequency GHz Glass/Window Double-pane (not tinted) dB coated glass dB 2,4 2-3 13 5 6-8 20 12.1.1.7 Radio Cell Planning Steps Generally speaking, the radio cell planning is an iterative process, following several main steps summarized below. Step 1: Consolidate customer expectations and local data • Range, number of MS, expected data rates, • Existing radio systems, power limitations Step 2: Capacity study • Derive number of devices • Frequency planning Step 3 – Coverage and Interference studies (linked to Step 2) • • Initial radio link budget (first cell dimensioning) Detailed Propagation model © EUROCAE, 20XX 116 • Antenna systems, choice of optimized localizations for BS and downtilts • Detailed radio coverage analysis Step 4 – Network optimization • Interferers mitigation • Tuning This process is unique for each deployment and is common to all the wireless radio technologies. 12.1.2 Capacity Analysis This section summarizes results of simulation efforts done within SESAR P15.2.7 to evaluate the capacity offered by an AeroMACS system. At the time of investigation in the SESAR project not all requirements had been finally defined. Especially the considered frequency mask used for the simulation was as follows: • Co-channel (N=0): 0 dB • Adjacent channel (N=1): 32 dB • Alternate channel (N=2): 50 dB These are less stringent requirements than in Figure XX, which shows the AeroMACS Profile mask. This has to be taken into account when considering material related to simulation and calculation of co- and adjacent channel interference levels. Therefore these simulation results can be considered as worst case[schlereth12]. Figure 43: Frequency Mask Capacity is considered as the ability of the system to fulfil a certain degree of accomplishment of requirements defined by the types of service that it enables. It is measured by means of throughput and delay parameters, which can be defined at different levels and scopes according to the boundaries of the system. For this analysis, AeroMACS capacity is compared with the latency and throughput 10 requirements that may be needed by the services identified . These metrics have been investigated either per service or at MAC layer (i.e. independent on the specific service that runs over the radio medium). For more details see Appendix C. Two possible scopes of study have been defined: 10 At the time of publication of the present document a SPR document covering all of the identified services was not available. As a consequence requirements on service level might change in the future. © EUROCAE, 20XX 117 Analysis of the coverage and capacity offered per cell; Study of the overall capacity offered in a whole airport (Madrid Barajas). 12.1.2.1 Capacity and coverage analysis per cell 12.1.2.1.1 Summary on simulation conditions This part of the analysis deals with AeroMACS coverage and capacity capabilities. Taking into account the PHY performance (BER/PER curves) provided by SANDRA project shown in Figures below and the Barajas path loss model, the “maximum” possible coverage is evaluated depending on the traffic pattern and the configured retransmission policy (ARQ). By maximum possible coverage the distance at which connections get dropped is meant, because throughput goes to zero; in fact at this distance the PER on the air-interface gets very high, greater than 10E-2, a condition in which communication is severely impacted. © EUROCAE, 20XX 118 0 10 -1 10 -2 BER 10 -3 10 -4 10 -5 10 0 CP=1/8Ts,#slot=1 (LIN) CP=1/8Ts,#slot=1 (ID) CP=1/16Ts,#slot=1 (LIN) CP=1/8Ts,#slot=195 (LIN) CP=1/16Ts,#slot=195 (LIN) 5 10 15 10 15 E /N [dB] b 0 0 10 -1 PER 10 -2 10 -3 10 -4 10 0 CP=1/8Ts,#slot=1 (LIN) CP=1/8Ts,#slot=1 (ID) CP=1/16Ts,#slot=1 (LIN) CP=1/8Ts,#slot=195 (LIN) CP=1/16Ts,#slot=195 (LIN) 5 E /N [dB] b 0 Figure 44: BER and PER in FL, LOS channel ([50], section 4.4) © EUROCAE, 20XX 119 0 10 CP=1/8Ts,#slot=1 (LIN) CP=1/8Ts,#slot=1 (ID) CP=1/16Ts,#slot=1 (LIN) CP=1/8Ts,#slot=195 (LIN) -1 10 -2 BER 10 -3 10 -4 10 -5 10 -6 10 0 5 10 15 E /N [dB] b 20 25 30 0 0 10 CP=1/8Ts,#slot=1 (LIN) CP=1/8Ts,#slot=1 (ID) CP=1/16Ts,#slot=1 (LIN) CP=1/8Ts,#slot=195 (LIN) -1 10 -2 PER 10 -3 10 -4 10 -5 10 0 5 10 15 E /N [dB] b 20 25 0 Figure 45: BER and PER in FL, NLOS channel [50] © EUROCAE, 20XX 30 120 0 10 -1 10 -2 BER 10 -3 10 -4 10 -5 10 -6 10 0 CP=1/8Ts,#slots=102 (LIN) CP=1/8Ts,#slots=1 (LIN) CP=1/16Ts,#slots=1 (LIN) CP=1/8Ts,#slots=1(ID) CP=1/8Ts,#slots=102 (ID) 5 10 E /N [dB] b 15 20 15 20 0 0 10 -1 PER 10 -2 10 -3 10 -4 10 0 CP=1/8Ts,#slots=1(LIN) CP=1/8Ts,#slots=1(ID) CP=1/8Ts,#slots=102(LIN) CP=1/8Ts,#slots=102(ID) CP=1/16Ts,#slots=1(LIN) 5 10 E /N [dB] b 0 Figure 46: BER and PER for RL, LOS channel [50] © EUROCAE, 20XX 121 0 10 CP=1/8Ts,#slot=1 (LIN) CP=1/8Ts,#slot=102 (LIN) CP=1/16Ts,#slot=1 (LIN) CP=1/8Ts,#slot=45 (LIN) -1 10 -2 BER 10 -3 10 -4 10 -5 10 -6 10 0 5 10 15 E /N [dB] b 20 25 30 0 0 10 CP=1/8Ts,#slot=1 (LIN) CP=1/8Ts,#slot=102 (LIN) CP=1/16Ts,#slot=1 (LIN) CP=1/8Ts,#slot=45 (LIN) -1 PER 10 -2 10 -3 10 -4 10 0 5 10 15 E /N [dB] b 20 25 30 0 Figure 47: BER and PER for RL, NLOS channel [50] The simulations are carried out in a single “cell” where a single mobile terminal moves away from the BS position with uniform motion and low speed until the throughput goes to zero. The speed of the MS was set to 5m/s (18 km/h). Hard constant bit rate (CBR)11 traffic has been considered; MAC-level SDUs are split in one or more PHYlevel PDUs that are then sent over the air-interface. Three different cases have been investigated: Case 1: the amount of generated traffic is such that to saturate the available physical bandwidth (the link theoretical capacity). Bandwidth saturation represents a worst case from a channel propagation point of view too, because the packet dimension, i.e. the PDU dimension, is maximum and hence the packet error rate is maximum too. In this case MAC layer gets two SDUs in downlink transmission and one SDU in uplink transmission every 5 ms. Case 2: the amount of generated traffic is one fifth of the link theoretical capacity but all the available resources (the frame slots) can still be allocated to the MS. In this case the link is not fully loaded. MAC layer gets one SDU in downlink transmission and one SDU in uplink transmission every 5 ms. Case 3: the amount of generated traffic is one fifth of the link theoretical capacity (as in case 2 above) but only one fourth of the available resources (1/4 of the frame slots) can be allocated to the MS. Here the situation is similar to case 1 with the difference that the available resources in the frame are less. The following modulation and coding schemes (MCS) have been considered: 11 Hard constant bit rate means a CBR traffic which has also tight restrictions on jitter and latency. © EUROCAE, 20XX 122 • • 16-QAM CC ½ QPSK CC ½ No Turbo-Decoding has been applied. Two SNR threshold values have been set in FL/RL to switch between them. These thresholds, shown in Table 30 below, have been set in order to select the modulation and coding scheme that guarantees the maximum throughput at each SNR12. Adaptive MCS threshold (SNR in dB) LoS NLoS UL 20.7 24.1 DL 24.9 28.7 Table 30: MCS switching thresholds According to suggestion in [9] the following two different ARQ schemes have been recommended: • ARQ type 1: (cumulative ACK mode). In cumulative mode, bit-wise maps are not used, hence the ARQ feedback is constantly 32 bits wide. BSN field is exploited to indicate that the corresponding block and all previous blocks (i.e., blocks with smaller BSN) have been successfully received. The cumulative ACK does not utilize explicit NACK, so the retransmission occurs when the Retransmission Timer of a given block expires. The maximum number of acknowledgeable blocks for each ARQ feedback IE is not prefixed. • ARQ type 2: (cumulative with selective ACK mode) This combines two ACK types: the BSN is used to acknowledge all the blocks smaller than the indicated value, then from 1 to 4 ACK maps are exploited to represent the blocks successfully received and the blocks that need to be retransmitted. Hence, the ARQ feedback IE extension varies from 48 to 96 bits and the number of blocks that can be acknowledged is not prefixed. Briefly, ARQ type 1 acknowledges transmission blocks in a cumulative way indicating the last block of the sequence correctly received so far. The retransmission in this case occurs after a time-out at the transmitter and all the blocks after the last acknowledged one are retransmitted. On the other side, ARQ type 2 combines the cumulative and the selective methods theoretically exploiting the advantages of both techniques. The feedback is composed of a cumulative part and a selective part. The performance level of each method depends on the specific scenario: ARQ ACK Type 1 presents a reduced feedback overhead when the traffic load is high, while ARQ ACK Type 2 presents the best performance in terms of delays but also showing a relatively low overhead in the feedback channel. 12.1.2.1.2 Conclusions Simulation results show that ARQ type 2 is more robust than ARQ type 1 in mediumhigh BER conditions, such as in MCS switching transients and every time channel conditions are harsh (for example when the distance between BS and MS is high). This means that ARQ type 2 should be preferred to ARQ type 1 to best manage these conditions. Comparing the results obtained in the three considered simulation Cases as outlined in more detail in APPENDIX XX it is possible to state that system performance is mainly influenced by two aspects, packet dimension and bandwidth saturation: 12 It is to be noted that these thresholds might be lower if using a CTC instead of a CC © EUROCAE, 20XX 123 - - if the packet dimension is reduced (Case 3) the probability of receiving wrong packets is lowered, the packet error rate decreases, the retransmissions overhead is reduced, the throughput is higher and more stable for a given distance and the communication range increases when there is much available bandwidth MCS changes do not reduce the throughput, because more packets can be sent in parallel (Case 2). Conversely if the bandwidth is almost saturated an MCS change halves the throughput and retransmissions’ overhead limits capacity (Cases 1 and 3) to an extent which depends on channel impairments and packets length; smaller packet lengths get a benefit from a lower error probability Table 31: Maximum coverage results Maximum coverage (meter) DL UL Full load – LoS – ARQ ACK 1 1495 1365 Full load – LoS – ARQ ACK 2 1600 1420 Full load – NLoS – ARQ ACK 2 955 965 1/5 traffic- LoS – ARQ ACK 2 1605 1405 1/5 traffic- NLoS – ARQ ACK 2 960 985 1/4 resources LoS – ARQ ACK 2 1835 1685 1/4 resources NLoS – ARQ ACK 2 1210 1125 Defining here the maximum coverage as the distance at which the throughput goes to zero for the first time, under all the previously stated hypotheses, we get the results shown in Table 31. As expected NLoS propagation condition is characterized by lower coverage (faster throughput degradation). It can be added that, especially in the LoS case, the maximum coverage of the uplink is slightly more limited than the downlink, even if the PER curves in FL are worse than in RL for SNR greater than about 12.5 dB. This is due to the fact that at these distances we are working with signal to noise ratios which are close to that value and the MS has 3 dB less maximum power than the BS; considering a shorter cell border where SNRs are higher might yield the opposite conclusion, that the system is downlink limited in coverage, especially in the NLos case. 12.1.2.2 Capacity analysis per airport 12.1.2.2.1 Operational concept This section evaluates the performance in terms of capacity offered by an AeroMACS system by means of simulation in a modelled airport environment. The approach followed here is different to that used in the previous section, where the study is focused in single AeroMACS cells. In this analysis, the system covers the whole airport area, while a single aircraft is the object of study throughout all the operational stages. For the sake of simplicity, configuration of trajectories and application demands is done by airport domain (e.g. RAMP, GROUND and TOWER[schlereth13]). Capacity performance is evaluated through the study of metrics that affect the end-toend availability levels of specific services or Classes of Service (CoS). In addition, specific metrics at MAC layer such as radio packet delay, frame occupation or © EUROCAE, 20XX 124 handover delay deliver information about the performance of the radio link. Results are not given in terms of coverage, which is studied in other sections. This analysis considers instead that the system dimensioning (i.e. number of BSs deployed) is defined in terms of capacity requirements to cover the necessary availability and continuity figures for the services executed on surface. In order to make the analysis as useful and close to reality as possible, a real case airport (Madrid Barajas) has been taken to define the environment. This is a particular case of complex airport type due to the large number of served operations and the large movement area. The air traffic model and mobility model have been extracted from real figures that take into account the airport layout and empiric traffic figures. The results have been extracted, however, targeting evaluation metrics that can be considered generic enough to be applied to any airport. Specific cell planning for Barajas is not explained here, AeroMACS Deployment Case StudiesAPPENDIX D: AeroMACS Deployment Case Studies should be checked for this purpose instead. More details on the capacity analysis can be found in Appendix C. 12.1.2.2.2 Conclusions In CAPACITY ANALYSIS, a capacity analysis of an AeroMACS deployment is carried out in an airport situation. An aircraft performing arrival and departure phases has been simulated in a large airport (Madrid Barajas) with a background traffic generated by present aircraft on the surface. Two iterations have been launched in refining the cell planning to cope with the capacity required by the system in the hypothetical case with all the potential identified NET/ATC/AOC services are active. Following this approach, the system has been challenged to its maximum possible capacity level (all possible current and future ATC and AOC services enabled through AeroMACS). A revision of the service list should be done by operational stakeholders at deployment stages. It has been shown that AeroMACS can cover the necessary services in this demanding capacity situation if cell planning and QoS configuration are correctly dimensioned. For the services executed when the aircraft is operating in the GROUND and TOWER domains, the system is clearly dimensioned by coverage, however in RAMP more attention needs to be paid to the amount and type of traffic that aircraft turning around will need to generate per sector. Consequently, BS sites in GND/TWR area may be spaced 2650 m out, while RAMP BSs should be closer (around 810 m). Regarding QoS, AeroMACS permits a balance to be achieved by means of adjusting the assignation of specific services to real time and non-real time CoS, and assigning a periodic polling rate that guarantees a dedicated data rate depending on the amount of traffic and delay requirements of the aggregated CoS. AeroMACS implementers should consider the expected data rate for every configured class of service (CoS), in order to guarantee a traffic rate and maximum delay adapted to the requirements of the most stringent services present in each of them. If this aspect is covered, AeroMACS is able to fulfil high throughput (1 Mbps) respecting real time-like delay requirements (80 ms) for an aggregation of different classes of service. See Appendix C for a detailed summary of the system results obtained with different configuration options. Finally it has been shown that AeroMACS fulfils the capacity requirements in terms of handover in the more exigent GROUND and TOWER zones (hence making it also valid for RAMP zone), if a distance between contiguous BS that participate in handover processes of 1300 m is respected (see Appendix C for more details). The reason why GROUND/TOWER zone shows harder conditions for HO execution is twofold: 1) the average cell radius is larger, making the HO happen at a cell edge that is placed further away from the BS at a lower signal level, and 2) the movement pattern of the MS in these zones shows a higher average speed thus suffering from a higher fading attenuation. This demonstrates that an optimized configuration of the AeroMACS cell planning can cope with dynamic behaviours in stringent conditions of terminal speed and link budget with fading. It has to be mentioned that the HO scheme applied is different from what has finally been defined in the AeroMACS Profile. This is because the simulation work supported AeroMACS Profile development and had been finished before final decision on © EUROCAE, 20XX 125 AeroMACS Profile features by RTCA and EUROCAE standardization bodies. Nevertheless simulation results can be considered as worst case scenario, because the HO optimisation is not active. 12.2 RF CELL PLANNING The purpose of this subsection is to identify and provide recommendations for AeroMACS cell planning and for intra and inter-system interference reducing. This will be done based on real example of deployments, on Barajas airport for frequency planning and intra-system interference, and on Toulouse airport for inter-system interference (MLS–AeroMACS) which will be studied in AeroMACS Deployment Case StudiesAPPENDIX D: AeroMACS Deployment Case Studies Case Study 2. 12.2.1 Simulation of intra-system interference 12.2.1.1 Frequency reuse-plan among base stations deployed over the airport area A frequency planning has been worked out for Barajas airport, with capacity hypothesis made previously. All spectrum available in future AeroMACS standard has been used. Because of the number of activated BS’s (24) and available frequencies (11), a frequency re-used has been used, operating a permutation of sectors on the airport area. The frequency permutation, as well as sectors deployed can be seen on the following table and figure. A more detailed analysis of this process can be found in AeroMACS Deployment Case StudiesAPPENDIX D: AeroMACS Deployment Case Studies (Case Study 1). Note: The calculation of central frequencies is done according to the formula (5005 +n*5 (n=0..4 and 19..28)), which gives 11 contiguous channels. Table 32: Frequency planning & reuse for intra-system interference analysis Frequency planning & reuse for HTZ 5005 +n*5 (n=0..4 and 19..28) n 0 1 Fi 5005 5010 n° Fi 1 2 Freq nb in HTZ 2 5015 3 3 5020 4 4 5025 5 11 available contiguous freq for range: 5091 to 5150 MHz 18 19 20 21 22 23 5095 5100 5105 5110 5115 5120 6 7 8 9 10 11 1 2 3 4 5 6 24 5125 12 7 25 5130 13 8 26 5135 14 9 27 5140 15 10 freq. n° 1 G1s1, G2s3 2 G1s3, G3s2 3 G1s2 4 G2s1 5 G2,s2, G3s3 6 R1s1, R3s3, R8s2 7 R1s3, R8s1, R10s3 8 R2s1, R4s1, R7s2 9 R2s3, R4s3 10 R3s1, R5s1, R6s3 11 R5s3, R7s1, R8s3 12 R6s2 13 R6s1, R9s2 Note that the tables above refer to physical and logical frequencies respectively. Among the logical frequencies, 1-5 are frequencies used in GROUND while 6-13 are frequencies used in RAMP. Frequencies 12 and 13 in RAMP are physically the same © EUROCAE, 20XX 28 5145 16 11 126 as frequencies 4 and 5 in GROUND, respectively. They have been re-used since they do not alter the frequency reuse scheme due to enough distance between emitting BS, thus avoiding intra-system interference limitations. 12.2.1.2 Simulation of intra-system interference (co-channel and adjacent channel interference) The purpose of this sub-section is to evaluate the co-channel and adjacent channel interference that may occur during a real deployment on airport. We still consider Barajas airport for this simulation. Interference is considered at BS level and calculation is performed according to C/I or IRF rules. Results will be presented and displayed on a map. A CINR analysis has been performed in order to check which modulation (i.e bit rate) will be lost according to the interference. For that, a C/(N+Sum(I)) has been calculated, based upon a noise floor N and the interference rejection factors (IRF) of the equipment. Note: C/(N+Sum(I)) function computes the maximum C/(N+sum(I)) value on each point of the terrain according to the noise level value of the receiving point. C is the received wanted power coming from activated stations considered one by one and unwanted power is the power sum of the other stations. Moreover, because PUSC permutation mode is used, the received wanted power C is weighted according to the number of segmentation and the “PUSC sector loading” allocated to the station. The following frequency mask has been considered: • • • Co-channel (N=0): 0 dB Adjacent channel (N=1): 32 dB Alternate channel (N=2) : 50 dB © EUROCAE, 20XX 127 Figure 48: Map of C/I intra-system interference, based on DL coverage Table 33: C/I versus Modulation Schemes13 C/I (>dB) 5 8 11 14 16 19 20 Received Power (>=dBm) -92 -86 -84 -80 -78 -76 -74 Modulation Scheme QPSK1/2 QPSK3/4 16QAM 1/2 16QAM 3/4 64QAM 1/2 64QAM 2/3 64QAM 3/4 In order to operate in a given modulation scheme, and thus access to a given data bit rate, a minimum C/I shall be respected. We observe on the C/I map that all the airport area have a C/I between 16 and 40dB, which means that, based on the frequency planning prepared, no interferences occur in the AeroMACS system for this deployment. Because FFR (Fractional Frequency Re-use) won’t be available in AeroMACS, if any interference appears during a cell planning, an optimization of either the frequency arrangement or BS localization will have to be done in an iterative process. 12.2.1.3 Optimization of cell planning As result of this cell planning process the number of base stations could change. In this case, the planning tool should make an iterative process in order to provide the best solution for any airport and in particular for the deployment within Barajas or Toulouse airports. Considering real cases: • Barajas airport (large airport) As no interference has been found on frequency allocation planned, no optimization has been processed. An optimization process could arise for other cases, where frequency availability would be very limited or where area to cover and capacity to achieve is high. The radio coverage is sufficient at this step. A deeper optimization would be useful when real deployment will occur. • Toulouse airport (small airport) 13 See table 85 Item 6 in Error! Reference source not found.Fehler! Verweisquelle konnte nicht gefunden werden. © EUROCAE, 20XX 128 Cell planning is basic, and focus has been done on inter-system interference analysis (see also AeroMACS Deployment Case StudiesAPPENDIX D: AeroMACS Deployment Case Studies). © EUROCAE, 20XX 129 CHAPTER 13 SECURITY REQUIREMENTS AeroMACS SHALL provide protection against unauthorized entry. AeroMACS SHALL support security control mechanism in order to avoid unauthorized users to reach and get ATC/AOC/NET services and interact with other parts of the infrastructure. AeroMACS SHALL perform device authentication. According to ARINC 842, aircraft identification SHALL be performed through tail numbering and optionally including ICAO 24-bit ID. AeroMACS SHALL support mechanisms and procedures to ensure message integrity and the continuous verification of the sender of the message. AeroMACS by means of Authorization and Authentication mechanisms SHALL deal with different types of access (USER/ADMIN). Nevertheless user authentication is out of the scope of AeroMACS and hence left to implementation. AeroMACS, in order to provide secured communications within the air interface (MS/BS) SHALL implement security association with cryptographic suites. Moreover, two types of Security Associations SHALL be implemented: primary and static. A Security Association will provide AeroMACS a set of security information by which a secured communication between the MS and the BS is established. The “primary” SA will enable secured management and data transport connections. The “static” SA are triggered by the MS when it intends to use a new service and therefore they are dynamically terminated when the data transfer in the service ends. AeroMACS BS units SHALL handle and manage the security, and connection identifiers of each MS that is successfully authenticated. AeroMACS SHALL provide transmission confidentiality. AeroMACS SHALL support AES and CCM-mode Encryption techniques. AeroMACS SHALL implement an authentication client-server protocol for supporting AAA procedures. The use of a AAA server will ease other functions like the HA or the HA address in order to accomplish the registration of “foreign” aircrafts within the visited airport. AeroMACS architecture SHALL give the means to correct billing of data traffic to the respective users (Accounting). Nevertheless the implementation of accounting in an AeroMACS deployment scenario will largely depend on the way airport infrastructure will be handled by airport operators. AeroMACS SHALL support the exchange of public certificates between MS and the authorization entities. AeroMACS SHALL support security association mechanisms between MS and BS. Therefore some control policy must be applied in order to give differentiated grade of service and accuracy to the same user. AeroMACS security SHALL be considered at every phase of the system's life cycle. AeroMACS devices SHOULD present as far as possible, the lowest number of exploitable vulnerabilities. In case COTS devices would be used Public vulnerability databases (e.g. National Vulnerability Database – NVD) COULD be used as they provide updated information on newly discovered vulnerabilities and relative corrective patches. The CVSS scores COULD be used in order to assess the criticality of a given vulnerability. AeroMACS operators SHOULD use security mechanisms (e.g. Firewalls) to limit the propagation of risk between AeroMACS interconnected nodes. A particular attention SHALL be given to protect nodes used at regional or larger scale (e.g. AAA servers, DHCP servers). AeroMACS operators MAY consider diversity of implementation to avoid loss or degradation of service at large scale in case of attacks. AeroMACS operators SHOULD note the intrinsic vulnerabilities of AeroMACS inherited from WiMAX implementation. For example, one may take advantage of the © EUROCAE, 20XX 130 fact that RNG-REQ and RNG-RSP messages are not encrypted neither authenticated during Network Entry Procedure to perform Eavesdropping, Denial of Service or Water torture attacks. These vulnerabilities SHOULD be taken into account while implementing and operating AeroMACS considering the context of operation in order to assess the actual related risk © EUROCAE, 20XX 131 CHAPTER 14 TEST CASES In the following subsections two types of test cases are defined. One set of system level test cases provides the required material to certify IPv6 and ETHERNET CS capability of AeroMACS. For this 3 system level test cases are described: 1) IPv6 test specification, 2) Ethernet CS test case specification, 3) Convergence Sublayer establishment test case specification. Text cases 1) and 2) are relevant for certification the according MAY layer items as outlined in the AeroMACS Profile [51]. They are complemented by the Convergence Sublayer establishment test case. Finally an end-to-end test case similar to the one described in the DLS CS [52] is defined to prove the interoperability of implemented constituents from an application level perspective. 14.1 IPv6 test cases specification The purpose of these test procedures is to verify that an AeroMACS system under test implements IETF RFC 2460 [53] as required in [57]. The test cases in this section cover AeroMACS PICS [57] item 2 in Table 74. 14.1.1 Test configuration 1 The following testing configuration is used to verify the IPv6 features in AeroMACS systems. Actual use will depend upon vendor preference, capability and test tool availability in the test laboratory. MS BS Roles: - IPv6 access router (stateless case) - DHCPv6 relay (stateful case) Wireline capture Wireless capture Remote STA1 ASN-GW IPv6 IPv6 Roles: - Data endpoint - AAA - DHCPv6 server (stateful case) IPv6 IPv6 IP CS IP CS GRE GRE MAC MAC IP* IP* LINK LINK PHY PHY LINK LINK PHY PHY PHY PHY Figure 49: IPv6 test cases test configuration *: Either IPv4 or IPv6 can be used in R6 as it is not a requirement for this test specification. © EUROCAE, 20XX 132 14.1.2 Tests description The following table summarizes the common preamble and test process that all IPv6 test cases have in common. Configuration Test configuration 1 Conditions Frequency channel: Middle. TX Power Level: Medium. Compressed-IPv6-Header: Enabled. PHS: Enabled. ARQ: Enabled. HARQ: Enabled. Authentication: Any. SS Management: Unmanaged. 1 DL and 1 UL BE Service Flows are Pre-Provisioned at the BS for this MS and the MS can support the Pre-Provisioned Service Flows. Service Flows Classification Rule: Based on IP address/port number. © EUROCAE, 20XX 133 14.1.3 TC-IPv6-STFUL Name: Identifier: Purpose: IPv6 CS: Stateful configuration TC-IPv6-STFUL The AeroMACS system supports stateful address configuration. 1) Start the monitor message capture, if available. Preamble: auto- 2) Switch on the MS. 3) Carry out the Network Entry procedure with IP-CS. 4) Verifies that the BS sends a DSA-REQ with CS classification “Packet IP” and the MS accepts it. 5) Carry out one downlink and one uplink BS initiated BE service flows. Steps: No System 1. AIRCRAFT1 Action ENTER 2. GND1 VERIFY 3. AIRCRAFT1 VERIFY 4. GND1 VERIFY 5. AIRCRAFT1 VERIFY 6. AIRCRAFT1 VERIFY Postamble: Description The AeroMACS MS has successfully completed network entry and device authentication. During authentication DHCPv6 server information has been included. The access router in the ASN sends a Router Advertisement message with the M-flag set. The MS sends a DHCPv6 REQUEST message requesting an IPv6 address to the DHCPv6 server identified during authentication. MS and ASN uses DHCPv6 procedures as defined in RFC 3315 [55] to configure a valid IPv6 address for the MS. The MS can send data traffic to the Remote STA1 (e.g., use ping6 command). When the lease lifetime for the assigned address is near to expire the MS sends a RENEW message to extend the lifetime of the IP address. None © EUROCAE, 20XX 134 14.1.4 TC-IPv6-STLESS-BV Name: Identifier: Purpose: IPv6 CS: Stateless configuration (valid behaviour) TC-IPv6-STLESS-BV The AeroMACS system supports stateless address autoconfiguration in the case of valid behavior. 1) Start the monitor message capture, if available. Preamble: 2) Switch on the MS. 3) Carry out the Network Entry procedure with IP-CS. 4) Verifies that the BS sends a DSA-REQ with CS classification “Packet IP” and the MS accepts it. 5) Carry out one downlink and one uplink BS initiated BE service flows. Steps: No System 1. AIRCRAFT1 Action ENTER Description The MS has successfully completed network entry and device authentication. 2. AIRCRAFT1 VERIFY The MS sends an IPv6 Router Solicitation message to start stateless IP configuration. 3. GND1 VERIFY The access router in the ASN sends a Router Advertisement message. 4. AIRCRAFT1 VERIFY The MS receives a Router Advertisement message, performs stateless auto-configuration of its IP address as defined in RFC 4862 [56] and performs duplicate address detection (DAD) by sending a Neighbor Solicitation message. 5. AIRCRAFT1 VERIFY The MS can send data traffic to the remote STA1 1 (e.g., use ping6 command) Postamble: None © EUROCAE, 20XX 135 14.1.5 TC-IPv6-STLESS-BI Name: Identifier: Purpose: IPv6 CS: Stateless configuration (invalid behaviour) TC-IPv6-STLESS-BI The AeroMACS system supports stateless address autoconfiguration in the case of invalid behaviour. 1) Start the monitor message capture, if available. Preamble: 2) Switch on the MS. 3) Carry out the Network Entry procedure with IP-CS. 4) Verifies that the BS sends a DSA-REQ with CS classification “Packet IP” and the MS accepts it. 5) Carry out one downlink and one uplink BS initiated BE service flows. Steps: No System 1. AIRCRAFT1 Action ENTER Description The MS has successfully completed network entry and device authentication. 2. AIRCRAFT1 VERIFY The MS sends an IPv6 Router Solicitation message to start stateless IP configuration. 3. GND1 VERIFY The access router in the ASN does not send Router Advertisement message. 4. AIRCRAFT1 VERIFY The MS initiates network exit and re-entry procedures Postamble: 14.1.6 None TC-IPV6-FRAG Name: Identifier: Purpose: Preamble: IPv6 CS: IPv6 Fragmentation TC-IPv6-FRAG The AeroMACS system supports IPv6 fragmentation. 1) Start the monitor message capture, if available. 2) Switch on the MS. 3) Carry out the Network Entry procedure with IP-CS. 4) Verifies that the BS sends a DSA-REQ with CS classification “Packet IP” and the MS accepts it. 5) Carry out one downlink and one uplink BS initiated BE service flows. Steps: No System 1. AIRCRAFT1 Action ENTER Description The MS has successfully completed network entry and device authentication. 2. AIRCRAFT1 VERIFY The MS has completed set-up of IPv6 Initial Service Flow. 3. AIRCRAFT1 ENTER The MS sends an UL IPv6 packet via the IPv6 Initial Service Flow exceeding the MTU size. 4. AIRCRAFT1 VERIFY The IPv6 packet is fragmented into more messages (1). Postamble: None Note 1: The existence of IPv6 fragments can be verified only by having a packet analyzer capturing packets in the wired side. © EUROCAE, 20XX 136 14.2 Ethernet CS test cases specification The test cases in this section cover AeroMACS PICS [57] item 3 in Table 74 which refers to Ethernet CS as specified in IEEE 802.16-2009 [39] section 5.2.4. Additionally, there are requirements for the PDU format and the classification rules which refer to IEEE 802.16-2009 [39] section 5.2.4.1 and 5.2.4.2. The purpose of these test procedures is therefore to verify that an AeroMACS system under test implements the following features of Ethernet CS sublayer: 14.2.1 • Ethernet CS PDU format as required in 2.2.5.2.4.1 which refers to 5.2.4.1 [39]. • Ethernet CS classification rules as required in 2.2.5.2.4.2 which refers to 5.2.4.2 [39]. Test configuration 1 The following testing configuration is used to verify the Ethernet CS features in AeroMACS systems. Actual use will depend upon vendor preference, capability and test tool availability in the test laboratory. • Data flow 1: IP traffic between Local STA 1 and Remote STA1 • Data flow 2: VLAN 1 traffic between Local STA2 and Remote STA2 without QoS. • Data flow 3: VLAN 2 traffic between Local STA2 and Remote STA2 with QoS. Hub MS BS ASN-GW Data flow 1 Local STA1 Remote STA1 Data flow 2 Local STA2 Hub Remote STA2 Data flow 3 (QoS) Local STA ETH MS BS ASN-GW ETH ETH ETH ETH ETH ETH CS ETH CS GRE GRE ANY MAC MAC IP IP LINK PHY PHY LINK LINK PHY PHY PHY Remote STA Figure 50: Ethernet CS test cases test configuration Note 1: Two stations are needed behind the MS with different IP addresses so that IP header based classification can be verified. Note 2: Two flows between the same stations are needed so that Type of Service based classification can be verified (while IP addresses are the same). Note 3: There are many classification rules in the IEEE 802.16e-2009 (section 11.13.18.3.3). Verifying all of them would not be practical for the test laboratory since it would require a highly complex test configuration. As trade- © EUROCAE, 20XX ETH 137 off three rules have been covered in this test specification: VLAN Id rule, IP src/dst rule and IP Type of Service rule. © EUROCAE, 20XX 138 14.2.2 Tests description The following table summarizes the common preamble and test process that all IPv6 test cases have in common. Configuration Test configuration 1 Conditions Frequency channel: Middle. TX Power Level: Medium. Compressed-IPv6-Header: Disabled. PHS: Enabled. ARQ: Disabled. HARQ: Disabled. If a HARQ MAP IE is used to specify the burst, the HARQ MAP IE used to specify the burst shall set ACK disable = 1. Authentication: Any. SS Management: Unmanaged. © EUROCAE, 20XX 139 14.2.3 TC-ETH-CS-IP_Rule Name: Identifier: Purpose: Preamble: Ethernet CS: IP header based classification TC-ETH-CS-IP_Rule The AeroMACS system supports IP header based classification. 1) Configure Ethernet CS rules for each service flow as per test case requirements. 2) Start the monitor message capture, if available. 3) Switch on the MS. 4) Carry out the Network Entry procedure with ETH-CS. 5) Verifies that the BS sends a DSA-REQ with CS classification “Eth” and the MS accepts it. Steps: No System 1. GND1 Action ENTER Description Configure Ethernet CS rules for one Best Effort Uplink service flow between MS and BS that accommodates: - Traffic flow 1 for IP traffic between Local and Remote STA1 by selecting the following rules: Rule 1: Protocol field IPv4 Rule 2: IP source address (Local STA1) Rule 3: IP destination (Remote STA1) 2. GND1 ENTER Configure Ethernet CS rules for one Best Effort Downlink service flow between MS and BS that accommodates: - Traffic flow 1 for IP traffic between Local and Remote STA1 by selecting the following rules: Rule 1: Protocol field IPv4 Rule 2: IP source address (Remote STA1) Rule 3: IP destination (Local STA1) 3. AIRCRAFT1 ENTER Switch on the MS. 4. AIRCRAFT1 VERIFY The AeroMACS MS has successfully completed network entry and device authentication. 5. AIRCRAFT1 VERIFY Verify connectivity (1) between Local STA1 and Remote STA1. 6. AIRCRAFT1 VERIFY Verify the format of the Ethernet CS packets in the Air interface (2). 7. AIRCRAFT1 VERIFY Verify no connectivity between Local STA1 and Remote STA2. Postamble: None © EUROCAE, 20XX 140 14.2.4 TC-ETH-CS-VLAN_Rule Name: Identifier: Purpose: Preamble: Ethernet CS: IP header based classification TC-ETH-CS-VLAN_Rule The AeroMACS system supports VLAN tag based classification. 1) Configure Ethernet CS rules for each service flow as per test case requirements. 2) Start the monitor message capture, if available. 3) Switch on the MS. 4) Carry out the Network Entry procedure with ETH-CS. 5) Verifies that the BS sends a DSA-REQ with CS classification “Eth” and the MS accepts it. Steps: No System 1. GND1 Action ENTER Description Configure Ethernet CS rules for one Best Effort Uplink service flow between MS and BS that accommodates: - Traffic flow 2 for IP traffic between Local and Remote STA 2 by selecting the following rules: Rule 1: VLAN Id 1 2. GND1 ENTER Configure Ethernet CS rules for one Best Effort Downlink service flow between MS and BS that accommodates: - Traffic flow 2 for IP traffic between Local and Remote STA2 by selecting the following rules: Rule 1: VLAN Id 1 3. AIRCRAFT1 ENTER Switch on the MS. 4. AIRCRAFT1 VERIFY The AeroMACS MS has successfully completed network entry and device authentication. 5. AIRCRAFT1 VERIFY Verify connectivity (1) between Local STA2 and Remote STA2. 6. AIRCRAFT1 VERIFY Verify no connectivity between Local STA2 and Remote STA1. Postamble: None © EUROCAE, 20XX 141 14.2.5 TC-ETH-CS-ToS_Rule Name: Identifier: Purpose: Ethernet CS: Type of Service based classification TC-ETH-CS-ToS_Rule The AeroMACS system supports Type of Service based classification. 1) Configure Ethernet CS rules for each service flow as per test case requirements. Preamble: 2) Start the monitor message capture, if available. 3) Switch on the MS. 4) Carry out the Network Entry procedure with ETH-CS. 5) Verifies that the BS sends a DSA-REQ with CS classification “Eth” and the MS accepts it. Steps: No System 1. GND1 Action ENTER Description Configure Ethernet CS rules for one Best Effort Uplink service flow between MS and BS that accommodates: - Traffic flow 2 for IP traffic between Local and Remote STA 2 by selecting the following rules: Rule 1: VLAN Id 1 Rule 2: IP Type of Service (None) 2. GND1 ENTER Configure Ethernet CS rules for one Best Effort Downlink service flow between MS and BS that accommodates: - Traffic flow 2 for IP traffic between Local and Remote STA1 by selecting the following rules: Rule 1: VLAN Id 1 Rule 2: IP Type of Service (None) 3. GND1 ENTER Configure Ethernet CS rules for one Best Effort Uplink service flow between MS and BS that accommodates: - Traffic flow 3 for IP traffic between Local and Remote STA 2 by selecting the following rules: Rule 1: VLAN Id 1 Rule 2: IP Type of Service (CS4) 4. AIRCRAFT1 ENTER Switch on the MS. 5. AIRCRAFT1 ENTER The AeroMACS MS has successfully completed network entry and device authentication. 6. AIRCRAFT1 VERIFY Verify best effort traffic connectivity (1) between Local STA2 and Remote STA2. 7. AIRCRAFT1 VERIFY Verify that the traffic is carried by two services flows through the air interface, more specifically: SF 1 (UL) carries ICMP Request messages. SF 2 (DL) carries ICMP Response messages. 8. AIRCRAFT1 VERIFY Send UDP datagrams with ToS byte set to CS4 (3) and verify that the datagrams reach Remote STA2. 9. AIRCRAFT1 VERIFY Verify that the traffic is carried by a third service flow (SF 3) through the air interface. © EUROCAE, 20XX 142 Postamble: None Note 1: Use ping command to “Remote STAx IP address” in STAx command line interface. Note 2: Format of Ethernet CS packets can be verified only by having packet analyzer capturing wireless packets. Note 3: Needs to user a traffic generator in Local STA 2 with ability to set ToS byte in the IP packet header. © EUROCAE, 20XX 143 14.3 Convergence Sublayer establishment The type of the CS established for the Service Flows is negotiated in the DSA procedure. More specifically, it is indicated by the peers in the CS Specification TLV (section 11.13.18.1, [54]). Therefore, the landing airborne using Ethernet, IPv4 or IPv6 to access AeroMACS services is decided in this phase of the network entry. According to AeroMACS MOPS, IPv4 CS is mandatory whereas IPv6 CS and Ethernet CS are optional under the labels [IO-IP6V6] and [IO-ETH] respectively. 14.3.1 Test configuration 1 The following testing configuration is used to verify the IPv6 features in AeroMACS systems. Actual use will depend upon vendor preference, capability and test tool availability in the test laboratory. MS BS ASN-GW Remote STA1 Wireless capture Figure 51: CS Establishment test cases test configuration 14.3.2 Tests description The following table summarizes the common preamble and test process that all IPv6 test cases have in common. Configuration Test configuration 1 Conditions Frequency channel: Middle. TX Power Level: Medium. Compressed-IPv6-Header: Disabled. PHS: Enabled. ARQ: Enabled. HARQ: Enabled. Authentication: Any. SS Management: Unmanaged. 1 DL and 1 UL BE Service Flows are Pre-Provisioned at the BS for this MS and the MS can support the Pre-Provisioned Service Flows. Service Flows Classification Rule: Based on IP address/port number. © EUROCAE, 20XX 144 14.3.3 TC-CS-IPv6_FB Name: Identifier: Purpose: CS Establishment: IPv4 fallback from IPv6 TC-CS-IPv6_FB The AeroMACS system supports fallback to IPv4 CS if the MS does not support IPv6 CS. 1) Start the monitor message capture, if available. Preamble: Steps: No System 1. AIRCRAFT1 Action ENTER Description Switch on the MS. 2. AIRCRAFT1 VERIFY The AeroMACS MS has successfully initiated network entry and device authentication. 3. GND1 VERIFY Verify that the AeroMACS BS sends DSA-REQ with CS Specification encoding set to Packet, IPv6 4. AIRCRAFT1 VERIFY Verify that the AeroMACS MS sends DSA-RSP indicating Rejection caused by CS Specification 5. GND1 VERIFY Verify that the AeroMACS BS sends DSA-ACK 6. GND1 VERIFY Verify that the AeroMACS BS sends DSA-REQ with CS Specification encoding set to Packet, IPv4 7. AIRCRAFT1 VERIFY Verify that the AeroMACS MS successfully completes network entry and can send data traffic to the remote STA1 (e.g., use ping command) Postamble: 14.3.4 None TC-CS-ETH_FB Name: Identifier: Purpose: CS Establishment: IPv4 fallback from Ethernet TC-CS-ETH_FB The AeroMACS system supports fallback to IPv4 CS if the MS does not support Ethernet CS. 1) Start the monitor message capture, if available. Preamble: Steps: No System 1. AIRCRAFT1 Action ENTER Description Switch on the MS. 2. AIRCRAFT1 VERIFY The AeroMACS MS has successfully initiated network entry and device authentication. 3. GND1 VERIFY Verify that the AeroMACS BS sends DSA-REQ with CS Specification encoding set to Packet, IEEE 802.3 4. AIRCRAFT1 VERIFY Verify that the AeroMACS MS sends DSA-RSP indicating Rejection caused by CS Specification 5. GND1 VERIFY Verify that the AeroMACS BS sends DSA-ACK 6. GND1 VERIFY Verify that the AeroMACS BS sends DSA-REQ with CS Specification encoding set to Packet, IPv4 7. AIRCRAFT1 VERIFY Verify that the AeroMACS MS successfully completes network entry and can send data traffic to the remote STA1 (e.g., use ping command) Postamble: None © EUROCAE, 20XX 145 14.4 D-TAXI Test cases This test case provides means of interoperability testing compliant with ETSI DLS CS [52] format for real aircraft tests. The purpose of the test is to verify the capability of the ground system to manage an end to end dialog through AeroMACS data links by the execution of a CPDLC service sequence between the end users over an authenticated AeroMACS data link with IP connectivity. CM and D-TAXI are considered as the application running. The test is satisfactory if the application dialogue is executed satisfactorily, since it proves the correct functioning of data link, IP connectivity, subscriber authentication and user data transmission. The figure presents the test configuration based on [22] reference architecture. FIGURE 52: END-TO-END TEST CASE CONFIGURATION Name: Identifier: Purpose: CM-Logon: nominal case CM_001 The purpose of the test is to check the Ground System correctly handles the CM-Logon service Preamble: It is assumed that AIRCRAFT1 is authorized to logon to GND1. As required by ED-110B, the logon request shall provide the optional ADEP and ADES fields. A single stationary MS in AIRCRAFT1 serviced by a single BS of the NAP1 of the Airport. Through NAP1, NSP infrastructure under test, It is assumed that the aircraft MS has already performed network entry with the BS and has been authenticated by the AAA server via the ASN-GW and been distributed the security keys by having passed WiMAX Forum NCT test cases [58] successfully. It is assumed that the MS has acquired an IP address by having passed IPv4 [58], IPv6 or ETH test cases successfully (see test case specification in sections 14.1, 14.2). Steps: No System 1. AIRCRAFT1 2. GND1 3. GND1 Action ENTER VERIFY ENTER 4. VERIFY AIRCRAF1 5. GND1 Postamble: VERIFY Description AIRCRAFT1 sends a CM-logon request to GND1 Check GND1 receives the CM-logon indication from AIRCRAFT1. GND1 responds with a positive CM-logon response to AIRCRAFT1. Check AIRCRAFT1 receives an accepted CM-logon confirmation message providing supported applications by GND1. Check on ground side that AIRCRAFT1 appears logged on GND1 None © EUROCAE, 20XX 146 Name: Identifier: Purpose: CPDLC connection: accepted CPDLC_001 The purpose of this test is to verify the Ground System correctly handles the CPDLC connection procedure with a logged aircraft. In this test, the request is accepted. This test also includes the CPDLC message exchanges allowing to consider CPDLC enabled (assignment of the Ground System as CDA, provision of the unit name of the R-ATSU). It is assumed that AIRCRAFT1 is already logged to the Ground System (c.f. test CM_001). Preamble: Steps: No System 1. GND1 Action ENTER 2. AIRCRAFT1 VERIFY 3. 4. AIRCRAFT1 GND1 ENTER VERIFY 5. AIRCRAFT1 ENTER 6. GND1 ENTER 7. GND1 ENTER 8. AIRCRAFT1 ENTER 9. GND1 ENTER 10. AIRCRAFT1 ENTER 11. AIRCRAFT1 ENTER 12. GND1 ENTER 13. GND1 ENTER Postamble: Description Send a CPDLC-start request to AIRCRAFT1 (no CPDLC message element provided). Check AIRCRAFT1 receives the CPDLC-start indication (no CPDLC message element provided) from GND1. Send an accepted CPDLC-start response to GND1. Check GND1 receives the accepted CPDLC-start confirmation from AIRCRAFT1. Send the DM99 CURRENT DATA AUTHORITY message to GND1 Check GND1 receives the DM99 CURRENT DATA AUTHORITY message from AIRCRAFT1. Send the UM227 LACK message to AIRCRAFT1 to acknowledge DM99 CURRENT DATA AUTHORITY message. Check AIRCRAFT1 receives the UM227 LACK message from GND1 acknowledging the DM99 CURRENT DATA AUTHORITY message. Send the UM183 'CURRENT ATC UNIT facility designation, facility name,facility function' message to AIRCRAFT1 Check AIRCRAFT1 receives the UM183 'CURRENT ATC UNIT facility designation, facility name, facility function' message. Send the DM100 LACK message to acknowledge the UM183 'CURRENT ATC UNIT facility designation, facility name, facility function' message Check GND1 receives the DM100 LACK message acknowledging the UM183 'CURRENT ATC UNIT facility designation, facility name, facility function' message Check AIRCRAFT1 appears as logged on and CPDLC connected to GND1. None © EUROCAE, 20XX 147 Name: Identifier: Purpose: CPDLC D_TAXI STARTUP TAXI_001 The purpose of this test is to verify the Ground System correctly handles the CPDLC TAXI Startup Preamble: Steps: No System 1. AIRCRAFT1 2. GND1 CPDLC_001 Action ENTER VERIFY 3. GND1 ENTER 4. AIRCRAFT1 VERIFY 5. 6. 7. GND1 AIRCRAFT1 AIRCRAFT1 ENTER VERIFY ENTER 8. GND1 VERIFY Postamble: Variants: Description Send the DM25 REQUEST [START-UP] CLEARANCE Check GND1 receives the DM25 REQUEST [START-UP] CLEARANCE Send the UM227 LACK message to AIRCRAFT1 to acknowledge DM25 REQUEST [START-UP] CLEARANCE message. Check AIRCRAFT1 receives the UM227 LACK message from GND1 acknowledging the DM25 REQUEST [START-UP] CLEARANCE message. Send the UM311 START UP APPROVED Check AIRCRAFT1 receives the UM311 START UP APPROVED Send the DM100 LACK message to GND1 to acknowledge the UM311 START UP APPROVED Check GND1 receives the DM100 LACK from AIRCRAFT1 acknowledging the UM311 START UP APPROVED None Repeat © EUROCAE, 20XX 148 Appendix A GUIDELINES FOR <xxx> Include any useful additional information as necessary. This is not a mandatory annex. © EUROCAE, 20XX 149 Appendix B ACRONYMS AND GLOSSARY OF TERMS Term Definition AAA Authorisation, Authentication and Accounting AeroMACS Aeronautical Mobile Airport Communication System AK Authorization Key AMC Adaptive Modulation and Coding AMHS Aeronautical Message Handling System AMT Aeronautical Mobile Telemetry ANSP Air Navigation Service Provider AR Airborne Router ARB Authoritative Representative Body AOC Airline Operational Communication ARQ Automatic Repeat Request AS Aeronautical Security ASN-GW Access Service Network-Gateway ATM Air Traffic Management BB Base Band BE Best Effort Service BER Bit Error Ratio BS Base Station BW Bandwidth CFMU Central Flow Management Unit CDM Collaborative Decision Making COCR Communications Operational Concept and Requirements COMT Eurocontrol COM Team CONOPS Concept of Operations COTS Commercial of the shelf DCL Departure Clearance DDS Data Distribution Services © EUROCAE, 20XX 150 Term Definition DL Downlink DoS Denial of Service D-TAXI Departure Taxi EAD European AIS Database EAP Extensible Authentication Protocol E-ATMS European Air Traffic Management System EIRP Effective isotropic Radiated Power EUROCAE European Organisation for Civil Aviation Equipment FA Foreign Agent FAB Functional Airspace Block FCI Future Communication Infrastructure FFS For Future Study FMTP Flight Message Transfer Protocol FOQA Fligt Operations Quality Assurance H-ARQ Hybrid Automatic Repeat Request H-NSP Home NSP HMI Human Machine Interface IP Internet Protocol IPsec Internet Protocol security ITU-R International Telecommunication Union – Radio Communications KEK Key encryption Key LOS Line of Sight MAC Medium Access Control MIMO Multiple Input Multiple Output MIP Mobile IP MLS Microwave Landing System MPLS Multiprotocol Label Switching MS Mobile Station © EUROCAE, 20XX 151 Term Definition MTOW Maximum Take-off Weight NAP Network Access Provider NET Network Management Service NLOS Non Line of Sight NSP Network Service Provider PENS Pan European Network Services PKM Privacy Key Management Protocol QoS Quality of Service RF Radio Frequency rtPS Real Time Polling Service RX Receiver SA Security Association SESAR Single European Sky ATM Research Programme SF Service Flow SJU SESAR Joint Undertaking (Agency of the European Commission) SJU Work Programme The programme which addresses all activities of the SESAR Joint Undertaking Agency. SESAR Programme The programme which defines the Research and Development activities and Projects for the SJU. SNR Signal to Noise Ratio SPR Safety and Performance Requirements SS Subscriber Station SWIM System Wide Information Management TEK Traffic Encryption Key TMA Terminal Control Area TX Transmit UGS Unsolicited Grant Service UL Uplink VLAN Virtual Local Aera Network ( IEEE 802.1Q) © EUROCAE, 20XX 152 Term Definition V-NSP Visiting NSP WA Work Activity WMF WiMAX Forum © EUROCAE, 20XX 153 Appendix C CAPACITY ANALYSIS C.1 Capacity analysis per operational domain This section presents a preliminary AeroMACS system performance analysis obtained by means of simulation results. Coverage analysis These simulations deals with AeroMACS coverage capabilities. Taking into account the PHY performance (BER/PER curves) provided by SANDRA project and the Barajas path loss model outlined in CHAPTER 12, the “maximum” possible coverage is evaluated. By maximum possible coverage the distance at which connections get dropped is meant, because throughput goes to zero; in fact at this distance the PER on the air-interface gets very high, greater than 10-2, a condition in which communication is severely impacted. C.1.1 Hypotheses made in simulations The simulations are carried out in a single “cell” where a single mobile terminal moves away from the BS position with uniform motion and low speed until the throughput goes to zero. The speed of the MS was set to 5m/s (18 km/h). We consider here hard constant bit rate (CBR)14 traffic; MAC-level SDUs are split in one or more PHY-level PDUs that are then sent over the air-interface. Three different cases have been considered: Case 1: the amount of generated traffic is such that to saturate the available physical bandwidth (the link theoretical capacity). Bandwidth saturation represents a worst case from a channel propagation point of view too, because the packet dimension, i.e. the PDU dimension, is maximum and hence the packet error rate is maximum too. In this case MAC layer gets two SDUs in downlink transmission and one SDU in uplink transmission every 5 ms Case 2: the amount of generated traffic is one fifth of the link theoretical capacity but all the available resources (the frame slots) can still be allocated to the MS. In this case the link is not fully loaded. MAC layer gets one SDU in downlink transmission and one SDU in uplink transmission every 5 ms. Case 3: the amount of generated traffic is one fifth of the link theoretical capacity (as in case 2 above) but only one fourth of the available resources (1/4 of the frame slots) can be allocated to the MS. Here the situation is similar to case 1 with the difference that the available resources in the frame are less Notice that the scheduler has the policy to use as wide as much PDUs to transmit data over the air interface; so this will generally happen in case 1 and case 2 but not in case 3 where resources are limited: in this last case smaller PDUs will be sent with higher frequency over the air interface for the same amount of offered traffic. In the table below the dimensions of the exchanged SDUs are shown: 14 Hard constant bit rate means a CBR traffic which has also tight restrictions on jitter and latency © EUROCAE, 20XX 154 SDU size DL (Byte) UL (Byte) full load 1400 + 1100 674 1/5 full load 500 134 Table 34: Service Data Unit dimensioning (Bytes) A traffic that saturates the available bandwidth is a traffic which at the physical layer is almost equal to the maximum link theoretical capacity; under the hypothesis of using 16QAM CC ½ and considering a fixed (1:2) UL/DL symbols ratio we get a traffic data rate of 4Mb/s in FL and 1.3Mb/s in RL. The simulator is based on a simplified PHY model which takes into account the effects of propagation channel (i.e. power losses) on the received signal and the consequent packet errors. Description Symbol Value Transmitted Power BS PTX,BS 23 dBm Transmitted Power MS PTX,SS 20 dBm Cable loss BS LBS 2 dB Cable loss MS LSS 2 dB Max antenna gain BS GBS 15 dBi Max antenna gain MS GSS 6 dBi Sampling frequency fs 5.6 MHz Carrier frequency fc 5.150 GHz Noise figure NF 8 dB Implementation Loss ImpLoss 5 dB Used subcarriers Nused 420(FL)/408(RL) FFT dimension NFFT 512 Table 35: PHY Layer parameters With reference to the parameters of Table 35 the received signal power and the SNR are calculated as: Prx = Ptx − Ltx − Lrx + Gtx + Grx − L SNR = Prx − N where L is the channel propagation loss and N is the noise term equal to: © EUROCAE, 20XX 155 N = −174 + 10 log10 ( fs N FFT N used ) + NF + ImpLoss The receiver evaluates the received signal level Prx, if it is higher than the Noise power N the receiver considers the packet as received, calculates its SNR value and addresses a specific PER value in the pre-computed tables allowing further considerations (packet correctly received or packet corrupted). In particular, a random number uniformly distributed between 0 and 1 is drawn and if this value is greater than the PER, the packet is considered correctly received, vice versa the packet is discarded. PER tables are addressed referring to different parameters: SNR, modulation and coding schemes (MCS), channel type (LoS, NLoS). For PER tables15 we refer to [34][35]. Two different MCSs have been used, QPSK CC ½ and 16QAM CC ½, and two SNR threshold values have been set in FL/RL to switch between them. These thresholds, shown in Table 36 below, have been set in order to select the modulation and coding scheme that guarantees the maximum throughput at each SNR16. Adaptive MCS threshold (SNR in dB) LoS NLoS UL 20.7 24.1 DL 24.9 28.7 Table 36: MCS switching thresholds In the PHY model the propagation loss L experienced by the transmitted signal is comprised of two components, the Path Loss (PL), that is an increasing function of the distance d, and the Slow Fading (SF), that is a random fluctuation around the average value given by the path loss: L=PL(d)+SF Two different propagation models are simulated, mainly LoS and mainly NLoS, mixing them according to the type of node (aircraft/vehicle) and considered area (Ramp/Tower). The so-called Barajas’ path loss models have been used in these simulations as propagation loss: 32.44 + 20 log f c + 20 log d + X σ L = − d 32.44 + 20 log f c + 20 log d BP + 10γ log d + X σ BP d < d BP d ≥ d BP where: • 15 16 dBP is the breakpoint distance We are interested in results in 5MHz bandwidth, 1 slot FEC, CP=1/8 and linear channel interpolation It is to be noted that these thresholds might be lower if using a CTC instead of a CC © EUROCAE, 20XX 156 • • X σ is the slow fading term where σ is the slow fading standard deviation γ is the path loss exponent for distances above dBP • fc is the carrier frequency in GHz Default values for the above parameters are shown in Table 37: Base Station height dBP γ σ BS1-MR1 12m 144m 4.13 1.67 BS2-MR1 38m 292m 4.15 2.80 BS1-MR2 12m 52m 3.4 4.25 BS2-MR2 38m 141m 3.15 3.96 Table 37: Barajas Pathloss models’ parameters The above table refers to a measure campaign executed in the Barajas Airport. In particular, two Base Stations (BS1 and BS2) were located at different heights of the West Tower of Barajas, which is located among the gates of Terminal 4. BS1 was located 12 meters above the airport surface, while BS2 was located 38 meters above the airport surface. Two mobile routes (MRs) were defined, related to BS1 and BS2. The Mobile Route MR1 is provided in Figure 53Figure 49. This route started almost below the tower, and ended by the end of the terminal building about 700 meters away from the tower. The second Mobile Route MR2 went in between parked aircraft, and not underneath the gates (see Figure 54Figure 50). © EUROCAE, 20XX 157 Figure 5349: Mobile Route MR1 Figure 5450: Mobile Route MR2 A BS height equal to 38m has been considered, hence BS2-MR1 is used in NLoS propagation conditions and BS2-MR2 is used in LoS propagation conditions. As a rule Ramp areas are considered as characterized by LoS (aircrafts) or NLoS (vehicles) propagation conditions respectively; Tower areas are considered to be always characterized by LoS propagation conditions. In order to evaluate coverage worst case propagation condition should be considered, so in this case BS2-MR1 without slow fading is applied to get more deterministic results. An ARQ scheme has been applied in simulations according to profile specifications. In particular in [9] two possible alternatives are suggested, ARQ type 1 and ARQ type 2. Both types have been considered in these simulations but results will only be presented for ARQ type 2 which showed to be more robust under medium-high BER conditions from a packet loss perspective (especially during MCS switching transients). Main ARQ parameters are set as in Table 38: © EUROCAE, 20XX 158 Parameter Value ARQ Block Size [bytes] 64 UL / 256 DL ARQ Window Size [ARQ blocks] 512 ARQ Block Lifetime [s] 6xRTI ARQ Retry Timeout 0,1 (Retransmission Time Interval-RTI) [s] Table 38: Main ARQ parameters Additional secondary-level parameters are set as in Table 39: Parameter ACK Type 1,2 In-Order SDU Delivery enabled Rearrangements enabled Feedback Time Interval Every 16 ARQ blocks correctly received Number of IE for each feedback message 1 Number of maps for each IE 1 Table 39: Secondary-level ARQ parameters Regardless of the size, every PDU consists of an integer number of ARQ blocks. For example in the case of only one MS the composition of PDUs and ARQ blocks is shown in Table 40: UPLINK DOWNLINK Q-PSK 1/2 16-QAM 1/2 Q-PSK 1/2 16-QAM 1/2 Size of PDU (slots) 68 68 219 219 Size of slot (bytes) 6 12 6 12 # ARQ blocks in PDU 6 12 5 10 © EUROCAE, 20XX 159 Size of ARQ block (bytes) 64 64 256 256 Table 40: Size of PDU and ARQ blocks A description of the IP layer model can be found in [9]. C.1.2 Analysis of results This section presents the coverage simulation results. In the simulated scenario there is only one node which starts to move after 10 seconds from BS position in radial direction with uniform motion and a speed equal to 5 m/s (18 km/h). The selected output metrics are: • • Throughput Packet loss For the goal of these simulations, evaluation of maximum coverage and packet delay has no relevance. As a matter of fact under a full traffic load condition high delays will occur when the terminal is far from the BS and will use QPSK modulation. The throughput values refer to the MAC SDUs reassembled at the receiver in each second. The transmitter sends through the MAC PDUs the different ARQ blocks of a SDU that are actual numbered SDU fragments. When every ARQ block of a SDU is correctly received at the receiver, the SDU is reassembled and sent to the upper layer. When a received ARQ block in a SDU still contains an error after the maximum number of retransmissions has elapsed the whole SDU is rejected and counted in the statistics of packet loss. So packet loss can be defined as the number of packets that are discarded by the transmitter after a certain number of retransmissions have failed. So the retransmission of packets does not enter into the calculation of throughput and packet loss metrics. Furthermore the packets that are dropped because the transmission queue is full (i.e. packets that are not even scheduled for transmission) are not considered in the statistics, i.e. packet loss refers only to channel effects. © EUROCAE, 20XX 160 Figure 5551: Throughput & Packet Loss with ARQ Type 1 and ARQ type 2 (UL) Results provided here are comparing throughput performance with respect to ARQ ACK types 1 and 2 usage. A traffic load almost equal to the theoretical link capacity and LoS propagation conditions are assumed. As Figure 55Figure 51 shows ARQ type 2 assures better performance than ARQ type 1 in medium-high BER conditions since it manages retransmissions in a more efficient way. At the beginning transmission is optimal and the channel causes very few errors which are managed by ARQ with negligible overhead. After about 120 seconds the propagation channel starts to insert more errors in the packets, leading to a throughput reduction due to a larger amount of retransmitted packets and a ripple effect in the throughput due to local delays in successfully delivered packets; still no packet loss is measured. At about 175 seconds the MCS is changed, switching from 16QAM to QPSK, to adapt to the worse channel conditions: throughput stabilizes to around ½ of the initial value and channel errors are reduced; during this transient phase some packets are lost if ARQ type 1 is used. After about 210 seconds the channel starts again to insert more and more errors in the packets, thus causing a gradual decrease in capacity due to retransmissions and a ripple in the throughput due to local delays. Packet loss remains null until around 265 s for type 1 and 285 s for type 2; afterwards channel conditions become so harsh that packet losses grow up very rapidly thus causing a rapid decrease in throughput too. After 310 s, © EUROCAE, 20XX 161 corresponding to a distance of 1500 meters, throughput goes to zero, thus causing packet loss going to zero in turn, transmitter stops sending packets and the connection is virtually lost. The performance behaviour of the downlink looks much like the uplink one. So ARQ type 2 seems to achieve better performance in terms of packet loss and throughput, especially during MCS switching and when channel conditions are harsh. As a result of previous simulations all following results will be given for ARQ type 2 only. Afterwards simulations were carried out in different conditions of traffic load and available resources as described previously in Case 1, Case 2 and Case 3; results were analysed as function of Los/NLos propagation conditions and UL/DL directions. In the following figures throughput and packet losses will be shown, in Cases 1, 2, 3 respectively, for the downlink only, but pretty much equivalent results hold for the uplink too. © EUROCAE, 20XX 162 Figure 5652: Case 1: Throughput & Packet Loss in Los/NLos (DL) Figure 5753: Case 2: Throughput & Packet Loss in Los/NLos (DL) © EUROCAE, 20XX 163 Figure 5854: Case 3: Throughput & Packet Loss in Los/NLos (DL) The general behaviour of the curves is the same as that observed in the ARQ type comparison: in a first step 16QAM transmission is used, with degrading performance while channel impairments grow up, until a time in which a switch to QPSK occurs (at about 160 s in Los and 125 s in NLos conditions) which causes throughput to temporarily stabilize. After some further time performance degrades again until packets are lost, throughput nullifies and the connection is virtually stopped (the persistent ripple phenomena on the packet loss of Figure 58Figure 54 - NLos case - are artefacts of the simulation which are not relevant for the results). From the figures it can be seen that i) the NLoS propagation condition causes a quicker degradation of performance and hence a smaller coverage ii) in Case 2 the change in modulation does not change the throughput because a lot of free resources are still available, where more than twice of the original resources can be used to sustain the source traffic rate iii) in Case 3 the range is a little bit increased with respect to Cases 1 and 2 (in fact the throughput goes to zero after a longer time period, at about 375 s in LoS and 250 s in NLoS). This last result, which might seem surprising, is caused by the scheduler algorithm implemented, because in Case 3 resources are limited, hence the scheduler will be forced to use shorter packets, transmitted of course with a higher frequency for the same amount of offered traffic. If the MAC PDUs are smaller the probability of error due to channel impairments decreases, assuring a better performance. Thus the BS scheduler could exploit smaller PDUs to transmit data to distant users with a more stable rate. This clearly indicates how important the scheduling algorithm for the overall system performance is. Results for the uplink follow the trends of the downlink, hence the same considerations apply. C.2 Capacity analysis per airport C.2.1 Operational concept This section evaluates the performance in terms of capacity offered by an AeroMACS system by means of simulation in a modelled airport environment. The approach followed here is different to that used in the previous section, where the study is focused in specific airport domains. In this analysis, the system covers the whole airport area, while a single aircraft is the object of study throughout all the operational stages. For the sake of simplicity, configuration of trajectories and application demands is done by domain, as explained in the proper sections. Capacity performance is evaluated through the study of metrics that affect the end-to-end availability levels of specific services or Classes of Service (CoS). In addition, specific metrics at MAC layer such as radio packet delay, frame occupation or handover delay deliver information about the performance of the radio link. Results are not given in terms of coverage, which is studied in other sections. This analysis considers instead that the system dimensioning (i.e. number of BSs deployed) is defined in terms of capacity requirements to cover the necessary availability and continuity figures for the services executed on surface. In order to make the analysis as useful and close to reality as possible, a real case airport (Madrid Barajas) has been taken to define the environment. This airport is a particular case of most complex © EUROCAE, 20XX 164 airport type due to the large number of served operations and the large size. The air traffic model and mobility model have been extracted from real figures that take into account the airport layout and empiric traffic figures. The results have been extracted, however, targeting evaluation metrics that can be considered generic enough to be applied to any airport. Specific cell planning for Barajas is not explained here, AeroMACS Deployment Case StudiesAPPENDIX D: AeroMACS Deployment Case Studies should be checked for this purpose instead. C.2.2 Propagation and PHY/MAC layer model It should be noted that this analysis is focused on system level capacity, while effects of physical channel, propagation and PHY features (BLER and SNR calculation) are abstracted. The configuration at this level follows the same models as in WA3 simulations with OPNET Modeler [5]. This document should be checked for more detail on the physical layer configuration. Briefly, the propagation channel configuration uses the analytical channel model for Barajas. HARQ is enabled and adaptive operation of every mandatory modulation and coding scheme (i.e. all except 64QAM in UL) are active. The BS and MS have ARQ and HARQ configured as in [51]. The ARQ mode used in this scenario is Mode 2 “Cumulative and Selective ACK”. Aircraft object of study The A/C object of study is configured in a deterministic basis. It is considered that, for data generation purposes, it follows the application model explained in CHAPTER 4. As it is indicated in the model description, the A/C executes a deterministic sequence of services that represent consecutive arrival and departure operations. The A/C also follows a deterministic trajectory and speed according to the airport layout and following a reasonable track to complete the operations. Note that the trajectory strongly affects the execution of the service sequence, since the chronological execution depends on the instantaneous position of the A/C in the departure and arrival processes. Airport zones have been split in three different zones, depending on the movements performed by the aircraft on surface, namely RAMP, GROUND and TOWER. In each zone the aircraft is configured with a different average speed, values are shown in table below: Arrival Speed [km/h] Speed [knots] TOWER 90 48.6 GROUND 40 21.6 RAMP 20 10.8 © EUROCAE, 20XX 165 Table 41: Arrival speeds Departure Speed [km/h] Speed [knots] RAMP 10 (in push-back) 5.4 20 (in taxiing) 10.8 GROUND 40 21.6 TOWER 90 48.6 Table 42: Departure speeds Due to the difference in trajectories followed by aircrafts in airport depending on a wide number of factors (atmospheric conditions, runway availability, assigned terminal position, airline operatives, etc), four different routes have been set in simulations, two in arrival phase, and two for departure phase. C.2.3 Scenario 1 This scenario assumes an AeroMACS equipped aircraft that completes the operational phases of arrival, turnaround and departure in a consecutive manner. This is the most stringent operational case since the aircraft needs to minimize the time in the airport in order to avoid flight delays caused by the departing or the previous arriving flight. In this situation, the aircraft is assumed to land on the 33L runway (South). Then, it performs taxiing to Terminal 2 allocated slot for turnaround. The aircraft finally takes off on the 36L runway (North). This scenario tries to illustrate the context in which the aircraft performs long carrier or transoceanic flights. This kind of flights have long permitted turnaround times, which is normally operated by major airlines. It is assumed that the runways are closer to the terminal, thus yielding the taxiing time interval minimum. However, it should be noted that this is not always the pattern followed by mainlines in this airport. Arrival For arrival trajectory we estimate a speed of 90km/h about the half of the runway (yellow), then the A/C waits for authorization during a holding time of 5 minutes. After that the A/C cross the GROUND zone at an average speed of 40 km/h (blue) and arrives to the RAMP zone at a speed of 20 km/h (red) stopping finally at the terminal finger. © EUROCAE, 20XX 166 Figure 5955: Scenario 1 arrival trajectory This sequence assumes that the aircraft will start synchronization once it enters TOWER zone below 50 knots speed, which happens when it surpasses half the length of the runway. It is also assumed that AeroMACS onboard the aircraft should be connected and operational at the runway exit. Total time for the arrival process (please note that time is the time between landing and the arrival to the airport terminal finger, it does not include disembarking) is 300 seconds, we show time values for each zone in the Table 43. After the stop of the aircraft the process of disembarking starts, time during the A/C still stays executing service. Time for each zone is shown in the table below. TOWER GROUND RAMP Post-arrival Total arrival Arrival [seconds] 63.87 186.44 48.6 1800 2098.912 Distance [meters] 1596.7 2071.6 270 © EUROCAE, 20XX 167 Speed [km/h] 90 40 20 Table 43: Scenario 1 arrival trajectory times According to the study of services description in CHAPTER 4 some of those services may be executed in parallel or not, because it is not strictly necessary for them to wait for previous services to have finished. However other ones need to wait for previous services to have finished. So, services grouped in the following tables with the same background colour and labelled with the same number may be executed in parallel. Each service is started in one of the airport zones (RAMP, GROUND, TOWER) according to the colored right column. For example, OOOI messages must be sent when the A/C pass from Ground zone to Ramp independently of previous services ending and because of that it is classified as a “parallel service”. The ACM service is executed when all the previous services have finished because in arrival phase and executed in the Ramp zone it finishes the communication. Aircraft->Base Station Base Station->Aircraft t[sec] Service Execution order 0 OOOI S1 AOC 0 NETKEEP S1->P NET 0 AUTOLAND-REG S1-P AOC 63 ACM S2 ATC ACM S2->P (periodic) ATC SURV 64 ToS Service NETKEEP TOWER 65 ACL S3 ATC ACL 69 D-SIG S4 ATC D-SIG 69 D-TAXI S4->P ATC D-TAXI 69 EFFU S4->P AOC EFFU © EUROCAE, 20XX GROUND 168 69 FLT-JOURNAL S4->P AOC 69 TECHLOG S4->P AOC 69 CREW-TIME S4->P AOC 254 OOOI S4->P AOC 254 FOQA S4->P AOC 252 FLTLOG S4->P AOC 252 CABINLOG S4->P AOC 252 ETS-REPORT S4->P AOC 252 REFUEL S4->P AOC S5 ATC When previous services have finished ACM TECHLOG RAMP ACM Table 44: Chronological description of Scenario 1 arrival trajectory[schlereth14] Departure In the Departure phase we have a previous time not considered here during which the A/C is executing services but it is not moving, for example during the boarding of passengers, baggage cargo, etc. The time while the A/C is moving starts with an initial pushback phase in the RAMP zone and finish about half of the runway where we exceed AEROMACS maximum speed supported. Please note the black line corresponds to the pushback procedure (10 km/h). © EUROCAE, 20XX 169 Figure 6056: Scenario 1 departure trajectory The departure time while the A/C is moving takes 868 seconds. The total time for the departure process showed (this time is taken since the A/C is towed when the Pushback starts until the A/C has gone over half of the runway) does not include boarding time and pre-departure times, time when the A/C is executing services. Time for each zone is shown in the table below. Predeparture Departure [seconds] 1800 Distance [meters] 0 Pushback RAMP Taxiing RAMP GROUND Taxiing TOWER Holding Time TOWER 47.88 141.3 325.98 53.6 300 133 785 3622 1340 © EUROCAE, 20XX Total departure 2668.76 170 Speed [km/h] 0 10 20 40 90 Table 45: Scenario 1 departure trajectory times The main difference between arrival and departure phase is the critical timeout of services, because all services must have finished before A/C departure. © EUROCAE, 20XX 171 © EUROCAE, 20XX 172 Table 46: Chronological description of Scenario 1 departure trajectory Taking this service sequence, the average generated ATC message size is 190 Bytes, and the average generated AOC message size is 278 kilobytes [6]. C.2.4 Scenario 2 In this situation, the aircraft is assumed to land on the 33R runway (South). Then, it performs taxiing to Terminal 2 allocated slot for turnaround. The aircraft finally takes off on the 36R runway (North). This scenario tries to illustrate the context in which the aircraft performs short regional flights. This kind of flights have short permitted turnaround times, which is normally operated by regional or low fare airlines. It is assumed that the runways are the furthest from the terminal, thus yielding the taxiing time interval maximum. However, it should be noted that this is not always the pattern followed by regional airlines in this airport. Arrival Exactly as happens in Scenario 1, we estimate a speed of 90km/h about the half of the runway (yellow) until the end of this, after this the A/C waits for authorization during a holding time of 5 minutes, then the A/C cross the GROUND zone at an average speed of 40 km/h (blue) and arrives to the RAMP zone at a speed of 20 km/h (red) stopping finally at the terminal finger. © EUROCAE, 20XX 173 Figure 6157: Scenario 2 arrival trajectory According to the description of arrival time used above the total time while the A/C is moving is 540 seconds. TOWER GROUND RAMP Post-arrival Total arrival [sec] Arrival [segs] 63.84 397.08 88.74 900 1449.66 meters 1596 4412 493 km/h 90 40 20 © EUROCAE, 20XX 174 Table 47: Scenario 2 arrival trajectory times This list of services and time between them are exactly the same that appears in Scenario 1 with the exception of the FOQA service whose size is now 10.000.000 Bytes. Base Station>Aircraft Aircraft->Base Station t[seconds] Service Execution order ToS Service 0 OOOI S1 AOC 0 NETKEEP S1->P NET 0 AUTOLAND-REG S1-P AOC 63 ACM S2 ATC ACM 64 S2->P (periodic) ATC SURV 64 ACL S3 ATC ACL 64 D-SIG S4 ATC D-SIG 64 D-TAXI S4->P ATC D-TAXI 64 EFFU S4->P AOC EFFU 64 FLT-JOURNAL S4->P AOC 64 TECHLOG S4->P AOC 64 CREW-TIME S4->P AOC 461 OOOI S4->P AOC 463 FOQA S4->P AOC 463 FLTLOG S4->P AOC 510 CABINLOG S4->P AOC 510 ETS-REPORT S4->P AOC 510 REFUEL S4->P AOC © EUROCAE, 20XX NETKEEP TOWER GROUND TECHLOG RAMP 175 When previous services have finished ACM S5 ATC ACM Table 48: Chronological description of Scenario 2 arrival trajectory. Departure According to the description of departure used above the trajectory for departure followed by the A/C and the time it takes is shown below. © EUROCAE, 20XX 176 Figure 6258: Scenario 2 departure trajectory According to the description of arrival time given in Scenario 1 the total time while the line A/C is moving is 913 seconds. Pre-departure Pushback Taxiing Holding Time Total RAMP Taxiing RAMP GROUND TOWER TOWER Departure 300 1813.94 Departure [segs] 900 39.6 70.74 450 53.6 Distance [meters] 0 110 393 5000 1340 Speed [km/h] 0 10 20 40 90 Table 49: Scenario 2 departure trajectory times This list of services and time between them are the same that appears in 00[schlereth15], with the exception of the following ones: E-CHARTS size is now 2.000.000 Bytes FOQA size is now 10.000.000 Bytes This is due to the fact that short-range aircrafts exchange a much lower amount of data to update the electronic flight charts and upload the log of the flight events. One should refer to SJU AOC study [28] AOC Datalink Dimensioning Executive Summary, SESAR] for further details. © EUROCAE, 20XX 177 © EUROCAE, 20XX 178 Table 50: Chronological description of Scenario 2 departure trajectory Taking this service sequence, the average generated ATC message size is 190 Bytes, and the average generated AOC message size is 63 kilobytes [6]. C.2.5 QoS model In order to configure a set of priority levels for the different applications executed over AeroMACS in the simulation, a refinement of the CoS classification from CHAPTER 4 is proposed here. For every Class of Service defined and applied at higher-layer messaging, a mapping is done to a specific QoS type applied by AeroMACS. Each QoS level defines the scheduling type, the estimated traffic reserved for the service type and the queuing algorithm. Note that AeroMACS, as based on the IEEE 802.16 standard series, does not imply hard priority between levels (i.e. packet by packet prioritization) but a QoS approach in which each level has been properly dimensioned to be able to guarantee a minimum throughput and maximum delay. Due to this, the QoS configuration in AeroMACS becomes complex and strongly depends on the specific operational concept. In this analysis, we will consider the configuration for the situation in which all the identified potential services are included, as previously explained. The possible scheduling types admitted by the profile for data services are the following: Non-real Time Polling Service (nrtPS) offers unicast polls on a regular basis, assuring a minimum reserved data rate even during network congestion. Bandwidth requests in queue are treated using the Modified Deficit Round Robin (MDRR) scheduling algorithm. Although the algorithm is implementation-dependent, for the sake of simulation a minimum polling rate is established. Real Time Polling Service (rtPS) offers real-time, periodic request opportunities that allow the subscriber to specify the size of the desired resources. Bandwidth requests in queue are treated using the Modified Deficit Round Robin (MDRR) scheduling algorithm. While rtPS requires more signalling overhead than nrtPS, it allows a periodic request interval of the order of milliseconds. It will be used for the most critical services that require a maximum delay per message of milliseconds, but should never be configured for heavy load services since it would have a strong impact on the allowed traffic for other messages. Best Effort (BE) guarantees no minimum throughput for the connection. It uses the remaining frame resources (if any) after the rest of connections have been allocated. In the simulation, the algorithm used to serve the queues is Round Robin (RR). The target of this scheduling type is heavy services that need to run in the background and are not delay sensitive. The table below depicts the QoS level mapping proposed for every defined CoS at this analysis (see also Table 7 in CHAPTER 4. For each QoS level, the relevant parameters used to define the polling rate are indicated. © EUROCAE, 20XX 179 CoS Services included SESAR P15.2.7 CoS [6] AeroMACS QoS NET NET services DG-A rtPS Max latency = 1s NETKEEP, NETCONN Min throughput =32 kbps ATS1 FPS by ADS-C DB-D rtPS Max latency = 1.5 s SURV Min throughput = 32 kbps ATS2 CIS (CPDLC) DG-C ACL, COTRAC, DCL, D-TAXI DG-D rtPS FPS FLIPCY, FLIPINT, PPD ATS3 DCM DG-C nrtPS DLL, ACM DG-D Min throughput =32 kbps FIS DG-F D-OTIS, D-SIGMET, D-RVR, D-SIG AVS AOC1 AOC2 D-FLUP AOCDLL, CABINLOG, FLTLOG, FLTPLAN, LOADSHT, OOOI, TECHLOG, WXGRAPH, WXRT, WXTEXT, BRFCD, DOOR, ACLOG, AIRWORTH, AUTOLAND-REG, BAGGAGE, NOTAM, CATERING, CREWL, CREW-RPS, CREW-BUL, CREW-REG, CREW-TIME, FLOWCON, REFUEL, HANDLING, LOADDOC, NOTOC, PASSENGER, PREFLT-INS, TAKEOFFCALC SWLOAD, UPLIB, EFF, EFFU, E-CHARTS, FLTJOURNAL, FOQA, SWLOAD25, SWCONF DG-J nrtPS DG-K Min throughput =64 kbps (UL), 128 kbps (DL) DG-K BE DG-L Table 51: CoS classification for Airport Capacity Analysis © EUROCAE, 20XX 180 C.2.6 Handover configuration The handover configuration is similar to that in [5] sections 3.3 and 2.3.2.3. Handover MS Handover Retransmission Timer [ms] 30 Maximum Handover Request Retransmissions 6 Handover Threshold Hysteresis [dB] 6 Maximum Handover Attempts per BS 10 Scan Duration (N) [Frames] 5 Interleaving Interval (P) [Frames] 140 Scan Iterations 3 Table 52: Handover parameters MS Handover Retransmission Timer: Time the Mobile Station will wait for a response after sending a MOB_MSHO-REQ message to the Serving Base Station. If no response (MOB_BSHO-RSP) is received within this time the Mobile Station will retransmit the MOB_MSHO-REQ message (until the maximum number of retransmissions is reached). Maximum Handover Request Retransmissions: Maximum number of retransmission attempts for the MOB_MSHO-REQ message. If set to 0 (zero) or "No Retransmissions", the Mobile Station will send the original MOB_MSHO-REQ and after expiration of "Handover Request Retransmission Interval" it will not retransmit the handover request. It will abandon the handover process instead. Handover Threshold Hysteresis: Specifies the minimum difference that a neighbour BS's CINR must be above the serving BS's CINR before triggering a handover decision to replace the serving BS with the neighbour BS. Maximum Handover Attempts per BS: Maximum number of attempts to handover to a specific target BS when the serving BS responds with a negative BSHO-RSP to the MS for that target BS. When Access Service Network is used by the serving BS to contact the target BS in advance (HO_Req), the target BS may indicate that it does not have enough resources to admit the MS. In this case the serving BS will indicate a rejection in its BSHO-RSP to the MS. This attribute prevents the MS from keep trying indefinitely to handover to a target BS with no resources. If set to "Disable", then the MS will ignore the BSHO-RSP and will continue with the handover process regardless of the capacity of the target BS. Scan Duration: Time (in frames) the Mobile Station scans/measures the neighbour BSs. Measurements are used to evaluate which BS is the best candidate to handover. © EUROCAE, 20XX 181 Interleaving Interval: Duration (in frames) of normal operation intervals (interleaving intervals) during the scanning mode of a Mobile Station. Scan Iterations: Number of repetitions of scan interval and interleaving interval during the scanning mode of a Mobile Station. • C.2.7 Background traffic The background traffic refers to all the data traffic generated by the rest of subscribers present in the airport surface that limit the radio resources usable by the A/C of study. In order to specify a representative model of the background traffic generation, a random model is used based on previous work from [6]. The relevant model for Barajas airport is extracted from those available in the study. 1. Air traffic figures in Madrid Barajas Barajas as a large airport has roughly 1100 operations per day. If we consider 15 operational hours within a day, and assuming uniform air traffic distribution along the day, we get 73 op/h which turns into 0,0203 op/s. Checking the appendix in [6][6] it can be observed that this ratio is the one used for scenarios of 50 A/Cs. Thus, it will be assumed from now on that Barajas has an average number of 50 A/C present on the airport surface. For sake of generality, it is considered that the A/Cs are uniformly distributed among the deployed cells. 2. Background traffic model Background traffic will be configured per Base Station; A node acting as both generator and sink is present at every BS taking background traffic model from scenarios in [6] according to each zone (RAMP, GROUND or TOWER) for an airport with 50 simultaneous ACs operating at the same time. Some modifications have been made in order to suit the model with the concluding results from SESAR P15.2.7 Profile validation [9], because of that FOQA service has been moved from GROUND zone to be initiated in RAMP zone, where the AC will stay long time in a static position. In consequence corresponding background traffic for the FOQA service has been extracted from GROUND zone and added to the RAMP zone. The following tables show the background traffic values for each operational zone according with the terms exposed. 50 A/C, 10 VC RAMP arrival Overall Total [Kbps] FL 137.53 RL 17355.42 © EUROCAE, 20XX 182 Table 53: RAMP Arrival Background traffic 50 A/C, 10 VC Overall RAMP departure Total [Kbps] FL 3106.42 RL 496.42 Table 54: RAMP Departure Background traffic (50 A/C, 10 VC) GROUND arrival Overall Total [Kbps] FL 352.47 RL 3418.44 Table 55: GROUND arrival Background traffic (50 A/C, 10 VC) GROUND departure Overall Total [Kbps] FL 180.93 RL 1807.70438 Table 56: GROUND Departure Background traffic (50 A/C, 10 VC) Overall TOWER arrival Total [Kbps] FL 1.08 RL 279.21 © EUROCAE, 20XX 183 Table 57: TOWER Arrival Background Traffic (50 A/C, 10 VC) Total [Kbps] Overall TOWER departure FL 0.88 RL 596.12 Table 58: TOWER Departure Background traffic Cell planning has been made covering RAMP zone with 64 QAM ½ in DL, and GROUND and TOWER covered with QPSK ½. In a first step BS sites for RAMP area have been selected and in a second step BS sites for TOWER and GROUND have been selected. We consider these two zones as one in terms of background traffic. Taking this into account final total values for Background traffic for all airport are the following ones: RAMP GROUND+TOWER Background Traffic 2.110E+04 6.637E+03 Kbps DL 3.244E+03 5.354E+02 Kbps UL 1.785E+04 6.101E+03 Kbps Table 59: UL&DL Background Traffic Note these values are the throughput generated at the whole airport. Since A/C are uniformly distributed per BS, it is straightforward to divide these figures by the number of BS taken in the scenario to obtain the background traffic present per BS. The expected traffic per cell can be derived by dividing the total traffic per airport zone by the number of cells deployed, obtaining approx. 1 Mbps (RAMP) and 800 kbps (GROUND/TOWER). Assuming nearly all traffic load is caused by AOC, these figures can be considered AOC traffic per cell. To derive ATC traffic share, the AOC/ATC ratio given by Table 23 for 100 A/C scenario can be © EUROCAE, 20XX 184 assumed constant (6500 for RAMP and 1200 for GND/TWR), thus obtaining roughly 0,2 kbps (RAMP) and 0,6 kbps (GND/TWR). 3. Simulation Results In this section, the following types of result are described to drive conclusions on the performance capacity and limits of AeroMACS deployments: • End-to-end delay of all the data packets that are successfully received by the WiMAX MAC and forwarded to the higher layer. This statistic is extracted per CoS as an aggregate of the packets generated by all the services in that class. The aim of this figure is to measure the MAC layer (SDU level) capacity performance against the radio latency requirements from [3]. • Service response time: This statistic exposes the time elapsed between the sending of the request from the source and the reception of the response at the source (if the service has respond messages).This is measured at application layer from the time the service starts with the first request at application layer until the response is received, or in case of unidirectional services, until the receiver receives the last packet sent by the sender. This statistic measures the effect of the radio throughput on the performance in service execution. Every service has a latency requirement, so service must have been completed in a time lapse less or equal to the latency requirement to be valid [3] . • Data burst usage: This metric records the portion of the UL and DL subframes allocated to service flow data (data bursts and polls). It excludes the size of preamble and MAPs, together with other signalling. It is a measure of the occupation of the radio medium available at a specific BS and give a figure on the saturation of the channel. This is useful to predict the availability for the channel to correctly serve further traffic requests. The simulation has been split in two main aspects. First, scenarios where a deployment of a given number of BSs enabling the execution of an arriving and departing aircraft passing by all the airport domains are launched. The focus in this battery is to find out the number of BSs necessary to yield enough capacity to the system to cope with the packet and service delay requirements. The two presented scenarios (Scenario1 and Scenario2) are evaluated following the same approach. This first battery of tests is performed in an iterative manner. The first iteration has been launched assuming a minimum configuration needed to cover the airport surface. It was then found that a second iteration with a more dense cell planning and a refined QoS configuration was needed to yield satisfactory results. While the comprehensive results are presented for the second iteration, a comparison is also presented in order to measure the effect of certain parameters into the performance figures. Finally, a refinement of the cell planning at the GROUND and TOWER areas is performed taking into account the main limitation of handover performance at these airport domains. This section is a refinement of the analysis performed in SESAR P15.2.7 taking into account the realistic environment and trajectories. The cell planning characteristics are summarized in the table below for both iterations. Note that cells have been split in two independent plans: RAMP area is composed of BS © EUROCAE, 20XX 185 with a high overlap ratio in order to cover the area with 16QAM or 64QAM schemes. GROUND/TOWER area is composed of BS minimizing the overlap, since the required service load is low, QPSK can be used and thus the deployment is coverage limited in that domain. Iteration # sites # BS (sectors) Reuse cluster size * Tx power Avg BS – BS distance Iter 1 RAMP 6 15 6 23 dBm 1300 GND/TWR 3 8 5 23 dBm 2650 RAMP 10 20 6+1 ** 23 dBm 1000 GND/TWR 3 8 5 23 dBm 1300 Iter 2 Table 60: Cell planning features used in capacity simulations *Reuse cluster size = Number of available channels without considering frequency reuse **One channel from GND/TWR has been reused in a single segment in RAMP zone a. Scenario 1 – Simulation Results As result of the second iteration in Barajas airport and following AC’s trajectory and speeds assumed for Scenario 1, the following metrics have been obtained for the different CoS and aeronautical services executed in the AC. The packet (MAC SDU) delay for every CoS is indicated below. Downlink direction is effectively well under the required packet latency in CHAPTER 6, while Uplink packets latency slightly surpasses the proposed requirement This effect is caused by the ATC message being fragmented and transmitted in a number of consecutive frames due to its size, and it does not affect the service execution latency. Hence, the requirement for the uplink latency is refined according to the figures that can be provided by the data link. It must be cleared out that packet latency requirements can only be targeted for critical ATS applications, AOC being out of this objective since these less priority applications must not be time limited and are thus considered delay tolerant. E2E Delay [avg][ms] NET ATC1 ATC2 © EUROCAE, 20XX ATC3 AOC1 AOC2 186 UpLink DownLink 53 56.33333 59.5 66 167.5 75 6.95 7.95 8.75 7.9 24.45 22 Table 61: End to end Delay per Class of Service The service latency figures for each specific application executed during the arrival and departing operation are indicated in the tables below. Services are depicted following a per-CoS classification. NET Service Arrival Departure Response Time [s] Latency Requirement [s] NETKEEP 0.91007 20 NETCONN 0.28186667 20 NETKEEP 0.15653333 20 Table 62: NET Services Response Time ATC1 Service Response Time [s] Latency Requeriment [s] Arrival SURV 1.157 1.2 Departure SURV 1.07415 1.2 Table 63: ATC1 Services Response Time ATC2 Service ACL Response Time [s] Latency Requirement [s] 0.65025 3 D-TAXI 0.2832 5 COTRAC (interactive) 0.6725 5 0.324 20 FLIPCY 0.194805 5 FLIPINT 0.206125 5 Arrival DCL Departure © EUROCAE, 20XX 187 PPD D-TAXI ACL 0.195625 10 0.32 5 1.3826 3 Table 64: ATC2 Services Response Time ATC3 Service Arrival Response Time [s] Latency Requeriment [s] ACM 0.975 3 D-SIG 0.71875 10 ACM 0.194375 3 DLL 0.1990775 3 0.414375 5 0.415 5 D-RVR 0.59575 3 D-SIG 0.611625 10 D-FLUP 0.21125 5 ACM 0.19125 3 ACM 0.195625 3 D-OTIS D-SIGMET Departure Table 65: ATC3 Services Response Time AOC1 Service Arrival Response Time [s] OOOI 4.604125 © EUROCAE, 20XX Latency Requeriment [s] 30 188 AUTOLAND-REG 1.39156 60 TECHLOG 0.393225 60 CREW-TIME 1.105475 60 0.64645 30 0.432945 60 0.1747875 60 0.15505 60 REFUEL 1.579625 30 AOCDLL 0.196125 60 0.34225 10 BRFCD 0.830625 30 ACLOG 2.6147875 30 0.1945 60 0.241 60 0.33 30 PASSENGER 0.9545 60 CREW-RPS 0.228 60 CREW-BUL 2.816625 60 CREW-REG 0.645125 60 FLTPLAN 0.367 30 NOTAM 0.5255 60 HANDLING 0.38725 60 CATERING 0.830625 60 BAGGAGE 7.536 20 0.374375 60 0.40875 20 OOOI FLTLOG CABINLOG ETS-REPORT LOADSHT TECHLOG AIRWORTH WXTEXT Departure NOTOC LOADDOC © EUROCAE, 20XX 189 PREFLT-INS 0.195 120 DOOR 1.071 30 0.1955 60 TAKEOFF-CALC 0.980625 40 OOOI 9.519125 30 WXRT 1.016 30 OOOI 0.749 30 FLOWCON Table 66: AOC1 Services Response Time AOC2 Service Response Time [s] EFFU 31.418 30 367.2365 60 1191.11875 1200 1064.785 60 426.626875 120 0.416125 120 109.4075 60 SWLOAD 26.429375 120 EFF/WXGRAPH/CREW-L 262.08875 60 EFFU 25.820625 30 FLT-JOURNAL Arrival Latency Requeriment [s] FOQA E-CHARTS UPLIB SWCONF Departure SWLOAD25 Table 67: AOC2 Services Response Time As can be observed from the tables, the response time of all critical services (NET and ATC) is lower than the service latency requirements, most of the services spending less than 1 second in the total completion. In effect, although the proposed requirements for these services were relatively loose, it © EUROCAE, 20XX 190 could be argued that, as critical applications, they should be however executed in the shortest possible delay. It is proven that AeroMACS can enable instantaneous transmission for safety critical ATC applications. AOC services are in general well under the delay requirements, too. However, it can be observed that the requirements set for several high load services (all belonging to AOC2 Class of Service) are inconsistent with the features (failed requirements are indicated “orange” in Table 67Table 67). Latency requirements are not applicable to AOC services and values are only shown for completeness. For instance, the execution of E-CHARTS in 60 seconds time would need a single subscriber to have 20 Mbps available for itself in the link. Besides, this level of stringency is unnecessary considering the operational needs of the application. These applications are completed during the turnaround phase that will take 20 minutes (2400 seg) at the very least, while AOC services can be executed in less than half that time. Thus, a review of the real needs for these services has to be undertaken by the involved airspace users to set a realistic figure that can drive a requirement. The figures below depict the frame utilization by data traffic for one specific channel. The sector to which the A/C is connected during the turnaround phase has been chosen such that the most highly loaded services are executed. It can be observed that, even considering the very worst case in which all the heavy services are instantiated (each of which is actually executed only during 1% of the flights) the channel does not reach complete saturation and can cope with additional critical ATC services if required. © EUROCAE, 20XX 191 Figure 6359: UL/DL WiMAX Frame. Data Burst Usage in % b. Scenario 2– Simulation Results Results are shown for the different CoS and aeronautical services executed in the AC in Scenario 2. The packet (MAC SDU) delay for every CoS is indicated below. It can be observed that both downlink and uplink figures are well under the packet latency requirements. Note that, in Scenario 2, heavy services are much minimised, by assuming the A/C is a short-range aircraft. RAMP services being the most stringent factor in this scenario, the traffic generated by these services does not affect the performance level. E2E Delay [avg][ms] NET ATC1 ATC2 ATC3 © EUROCAE, 20XX AOC1 AOC2 192 UpLink 6.4 10.42625 9.9875 7.80625 24.4875 20.65 DownLink 6.45 9.764375 9.33125 8.289375 23.13125 20.125 Table 68: End to end delay per Class of Service The service latency figures for each specific applications executed during the arrival and departing operation are indicated in the tables below. Services are depicted following a per-CoS classification. NET Service Arrival Response Time [s] Latency Requirement [s] NETKEEP 0.2998 20 NETCONN 0.156 20 NETKEEP 0.0494 20 Departure Table 69: NET Services Response Time ATC1 Service Response Time [s] Latency Requirement [s] Arrival SURV 0.066 1.2 Departure SURV 0.061033333 1.2 Table 70: ATC1 Services Response Time ATC2 Service ACL Response Latency Time [s] Requirement [s] 0.18 3 0.126 5 0.46732 5 0.815 20 Arrival D-TAXI COTRAC Departure (interactive) DCL © EUROCAE, 20XX 193 FLIPCY 0.63 5 0.2225 5 PPD 0.25572 10 D-TAXI 0.55875 5 0.125 3 FLIPINT ACL Table 71: ATC2 Services Response ATC3 Service Arrival Response Time [s] Latency Requirement [s] ACM 0.086 3 D-SIG 0.372 10 ACM 0.34 3 0.09575 3 0.292 5 D-SIGMET 0.2278 5 D-RVR 2.1146 3 D-SIG 2.1132 10 D-FLUP 0.328 5 ACM 0.095 3 ACM 0.085 3 DLL D-OTIS Departure Table 72: ATC3 Services Response AOC1 Service Arrival Response Time [s] OOOI 0.76 © EUROCAE, 20XX Latency Requirement [s] 30 194 AUTOLANDREG 0.1866 60 TECHLOG 0.0506 60 CREW-TIME 0.1196 60 OOOI 0.229 30 FLTLOG 0.294 60 CABINLOG 0.197 60 ETS-REPORT 0.187 60 REFUEL 1.78 30 AOCDLL 0.190333333 60 LOADSHT 2.544 10 BRFCD 0.795 30 ACLOG 3.368 30 TECHLOG 0.198 60 AIRWORTH 0.1876 60 WXTEXT 0.3802 30 PASSENGER 0.856 60 CREW-RPS 0.1932 60 CREW-BUL 2.508 60 CREW-REG 0.443 60 FLTPLAN 0.4356 30 NOTAM 0.5218 60 HANDLING 0.3574 60 CATERING 1.1524 60 BAGGAGE 10.232 20 NOTOC 0.5328 60 LOADDOC 0.5474 20 Departure © EUROCAE, 20XX 195 PREFLT-INS 0.2352 120 DOOR 1.4232 30 FLOWCON 1.0894 60 15.5668 40 OOOI 0.566666667 30 WXRT 0.751 30 OOOI 0.75 30 TAKEOFF-CALC Table 73: AOC1 Services Response Time AOC2 Service Latency Response Requirement Time [s] [s] EFFU Arrival Departure 17.72 30 320 60 FOQA 189.8 1200 E-CHARTS 205.4 60 UPLIB 1060 120 SWCONF 71.6 120 110.464 60 163.3 120 325.286 60 86.222 30 FLT-JOURNAL SWLOAD25 SWLOAD EFF/WXGRAPH/CREWL EFFU Table 74: AOC2 Services Response Time © EUROCAE, 20XX 196 It can be observed that, as in Scenario 1, the service latency requirements for ATC are fully accomplished. Note that this scenario is more stringent in terms of turnaround time. The same effect as in Scenario 1 is replicated here, although the heavy services are mitigated as they generate a smaller amount of traffic. The figures below depict the frame utilization by data traffic for one specific channel. The sector to which the A/C is connected during the turnaround phase has been chosen, where the most highly loaded services are executed. It can be observed that, even considering the very worst case in which all the highly loaded services are instantiated (each of which is actually executed only during 1% of the flights) the channel does not reach complete saturation and can cope with additional critical ATC services if required. © EUROCAE, 20XX 197 Figure 6460: UL/DL WiMAX Frame. Data Burst Usage in % c. Comparison between Iteration 1 and Iteration 2 for scenario 1. In order to get convergence between services response time and required latency a pair of iterations increasing the number of base stations has been necessary. Scenario 1 is assumed for the sake of comparison. This paragraph show briefly main differences between the two iterations. The table below summarises the number of BS configured per iteration, and the consequent amount of background traffic. It can be observed that, in iteration 2, the number of BS in the RAMP area were increased, while GROUND/TOWER kept the same planning. That is due to the fact that the services found to be operating near the limit of the system capacity, as shown in the results below, were executed in RAMP. Note that, assuming uniform background traffic distribution in the airport surface, this figure is inversely proportional to the number of BS. Refer to the first subsection in 3C.2.8 for detail on the difference between cell planning in iteration 1 and iteration 2. In the latter, the background traffic that occupies a sector is around 1 Mbps. © EUROCAE, 20XX 198 Iteration 1 RAMP Iteration 2 15 20 8 8 Background traffic in DL RAMP [Kbps] UL 216.263333 162.1975 1190.12267 892.592 Background traffic in DL GROUND&TOWER [kbps] UL 66.92 66.92 Number of BSs GROUND&TOWER 762.684297 762.684297 Table 75: Summary of BS number and background traffic figures per iteration Another major difference of iteration 1 is the QoS configuration. For polling services, the polling rate at which the BS sends periodic unsolicited poll requests has been under dimensioned in iteration 1. In addition, ATC3 CoS has been configured as nrtPS instead of rtPS as in iteration 2. As a consequence, a minimum periodic poll rate is not set up, and thus the maximum latency per packet is not controllable. The differences in QoS configuration is depicted in the table below. The polling rate is a figure extracted from the configured parameters Maximum or Minimum Traffic Rate. The algorithm to work out the polling rate (PR) is implementation dependent. Class of Service Iteration 1 Iteration 2 NET rtPS rtPS PR = 1 ms PR = 5 ms rtPS rtPS PR = 1 ms PR = 7.813 ms rtPS rtPS PR = 1 ms PR = 9.375 ms nrtPS rtPS PR = 1 ms PR = 10.714 ms nrtPS nrtPS PR = 1 ms PR = 23.475 ms BE BE ATC1 ATC2 ATC3 AOC1 AOC2 © EUROCAE, 20XX 199 Table 76: QoS configuration for iteration 1 and iteration 2 Differences on the results in terms of packet delay and execution latency for some relevant services is shown in the tables below. The first aspect to observe, is the poor result for iteration 1 in the tables below: although the polling rate is maximum for every CoS (1 ms), there is a big difference between the maximum delays caused per CoS, and those that are not coherent with the priority level the CoS should have. That is explained by the fact that, in the de facto QoS configuration in iteration 1, there is no effective prioritization at all. By scheduling the same polling rate to all rtPS CoS, they are finally served in a FIFO manner. In this case, the packets that arrive at the queue will be dequeued at a lower delay than those arriving at peak traffic instants. On the other side, nrtPS services are always served with a lower priority, thus causing a significantly longer delay. That is why, in iteration 2, an affective prioritization is configured to serve each CoS in a gradual manner according to its level of priority. NET E2E Delay [avg][ms] ATC1 I1 I2 I1 UpLink 55.85 53 27.8 DownLink 8.765 6.95 8.255 ATC2 I2 I1 56.33333 22.75 7.95 9.735 ATC3 AOC1 AOC2 I2 I1 I2 I1 I2 I1 I2 59.5 480.5 66 179 167.5 80.5 75 8.75 10.583 7.9 38.2 24.45 19.795 Table 77: Results on packet latency for iteration 1 and iteration 2. Scenario 1 Iter 1 Iter 2 Service Name Simulation Simulation Latency Latency GND Arr ACL 4.475 0.65025 3 EFFU 111.6 31.418 30 939 367.2365 60 - 0.194375 3 ECHARTS 933.14 1064.785 60 UPLIB 375.66 426.626875 120 SWLOAD 123.8 26.429375 60 EFF 340.22 262.08875 60 FLT-JOURNAL RMP Arr RMP Dep Required Latency [s] ACM © EUROCAE, 20XX 22 200 GND Dep TWR Dep ACM - 0.19125 ACL - 1.3826 WXRT - 1.016 3 30 Table 78: Capacity limitations in Iteration 1 solved in Iteration 2 A balanced latency target can be achieved through proper QoS configuration. Note that, in order to do this, dimensioning should not be equal per CoS, but rather a polling rate needs to be configured per CoS depending to the traffic generation rate and message size of the aggregated services in the specific class. Of course, an implementation-dependent algorithm could be active in the scheduler to adapt to the CoS varying data rate in an optimized manner. It can be observed that, with a wellbalanced QoS, the end-to-end delay of a packet is well below 80 ms, which is very valid for data, and even for real time and voice applications. It is obvious that the QoS configuration mainly affects the Uplink in terms of delay. In effect, the Downlink does not require a polling delay since the BS generates traffic and directly forwards it to lower layers. Uplink, on the other side, has a delay of several frame due to polling negotiation. Besides, with the current symbol configuration, the downlink has more available resources than the Uplink, which could be optimized (within the limits of supported symbol configurations in [51] although not strictly necessary. Regarding service execution latency, it can be observed that iteration 2 deals better with it in general, especially for ATS. Some highly loaded services would still require a redefinition in terms of required latency to suit them better to the operational concept and milestones. In that context it should be mentioned that Iteration 2 is just an example no how to improve performance of AeroMACS, but it should not be considered as a standard setting. Optimisation has to be done on a case by case basis and the information provided can be used as guideline on how to do it. Finally, the graphs below depict the improvement in terms of frame occupation by data traffic achieved by the refined configuration in iteration 2. It can be observed that, in both Downlink and Uplink, iteration 1 led to a saturation of the channel in the BS in charge of the turn-around phase. This is due to the under-dimensioned cell planning but also to the non-optimized QoS per class of service, which causes an overhead provoked by excessive polling delay. Iteration 2 solves both issues and avoids a saturation of the channel, thus allowing new service flows to be admitted in the sector if necessary. It should be mentioned that Iteration 2 although providing better results should not be considered as a minimum performance standard. It should only explain how improvement can be reached taking into account specific environmental conditions. © EUROCAE, 20XX 201 As outlined above what is important to note is that a balanced latency target can be achieved through proper QoS configuration. Note that, in order to do this, dimensioning should not be equal per CoS, but rather a polling rate needs to be configured per CoS depending to the traffic generation rate and message size of the aggregated services in the specific class. Figure 6561: WiMAX DownLink Data Burst Usage. Red=Iteration2. Blue=Iteration1. © EUROCAE, 20XX 202 Figure 6662: WiMAX UpLink Data Burst Usage. Red=Iteration2. Blue=Iteration1. 4. Handover results The network dimensioning affects mainly the capacity levels of the system in terms of throughput and delay, which could be seen as parameters of “static” capacity (i.e. linked to the ratio BS vs aircrafts in the overall airport surface). However, capacity also includes the performance levels of the handover process (i.e. the smooth transition of an aircraft registered in a BS to a different one without session interruption), since it may affect the availability of services being executed at a specific moment. As this process is purely dynamic, handover figures depend largely on the aircraft movement on surface, BS placement and signal quality on the moment of handover. This section is a refinement of the handover performance study started in [5]. According to these results, handover is not an issue at RAMP area, where BSs are dense and the subscriber is handed over at high signal to noise values. Besides, the aircraft is expected to move slowly, thus suffering low shadow fading effect. An optimization is needed in GROUND/TOWER areas, though, where BSs are more distant and the aircraft moves faster. This is a harsh situation that leads to a refinement of the cell planning to meet the requirements. The scenario follows the arrival and departure trajectory defined in Scenario 2, starting from the cell planning proposed in iteration 2. The aircraft in this scenario executes services following the data rate in background traffic generation. This is configured in order to obtain a uniform traffic generation and study the effect of handover interruption over the services. In addition, shadow fading has been activated and considered for GROUND and TOWER zones in the same way as in [5]. MAC and PHY configuration is similar to that in ([5] section 3.3). For sake of comparison, statistics similar to [5] have been analysed here. © EUROCAE, 20XX 203 Handover delay: Handover delay is computed from the time the Mobile Station sends a MOB_MSHO-REQ message starting the handoff process until initial ranging with the new Serving BS is successfully completed. Interruption Time17: Time between the message indicating the start of the HO (HO_IND) and the creation of the new service flow (DSA_ACK). Failure probability: percentage of Handover Cancellations produced during simulation time over all the Handover realizations. Dropped Packet Rate: this new statistic has been gathered in this scenario in order to illustrate the effect from handover interruption and delay to the transmission of data packets. This statistic is extracted at PHY SDU level, in order not to take buffering effects into account. Handover optimisation has been performed taking care of the cell range of contiguous BSs that participate in handover processes (not in all of them). In this sense, contiguous BSs inside GND/TWR or between RAMP and GND/TWR are taken into account (handover within RAMP zone is not part of this analysis). In order to do this, the implementer has to estimate the most likely movement patterns that an aircraft will follow, as has been done in this study. First, the cell planning from iteration 2 is kept in the simulation, where consecutive BSs in an aircraft trajectory are distanced 2650 m in average. Then, consecutive cells that fall under a likely aircraft trajectory are brought closer to the distance necessary to target the recommended PER = 1E-03 from 0 at the cell edge. To meet this PER level at QPSK ½ an SNR = 17 dB is needed (see Figure 3-14 in Calibration simulations of [5]), which corresponds to a cell range of 650 m (1300 m distance between BS) according to Figure 26 with propagation model BS1MS1, and considering Noise power = -107.4 dBm. See AeroMACS Deployment Case StudiesAPPENDIX D: AeroMACS Deployment Case Studies for details on the BS sitting. Contiguous BS avg distance Avg HO delay [ms] Avg interruption time [ms] Probability of HO failure [%] Dropped Packet Rate in UL [%] Dropped Packet Rate in DL [%] 2650 (initial) 402,84 266,73 7,16 8,68 1,44 322,54 194 3,6 7,77 0,84 1300 m m Table 79: Results for HO performance. Consecutive BS distance = 2650 m / 1300 m Results show that, in effect, a distance of 1300 m for the BS affected by handover guarantees the fulfilment of the requirement in terms of handover interruption time. It also yields an acceptable probability of handover failure below 4%. Even keeping the initial BS distance of 2650 m it should be 17 This definition is different to standard definition of interruption time within this document. At the time simulation has been conducted HO optimisation was not active. © EUROCAE, 20XX 204 noted that the packet dropping rate caused by handover interruption remains well under 10%. Note that dropping rate has been measured at PHY level, thus not taking retransmission into account. MAC takes charge of the dropped packets by retransmitting them in ARQ. Note that, as previously indicated, only the distance between contiguous BSs that participate in the handover process has been taken into account, it is unnecessarily costly to increase the density of BS in areas that will not see a cell transfer. This is feasible since mobility patterns of aircrafts in the surface are predictable and limited to very specific runway and taxiway zones. It is recommended for a deployment to take care of this when planning the cell sitting in order to optimise handover performance without largely increasing the density of BS. © EUROCAE, 20XX 205 Appendix D AeroMACS Deployment Case Studies D.1 PREAMBLE: Radio Planning Tool and Parameters HTZ is a commercial tool, based on ICS Telecom tool, and dedicated to military application. It brings few additive functionalities dealing with jammers and interference stations. Environmental Models HTZ is a deterministic tool taking into account the real environment cartography, the Digital Elevation Model (DEM), whenever all details are available. The choice of the cartography to use depends on the type of WiMAX radio-planning to perform: • Large scale WiMAX networks would require Medium Resolution cartography • Close range WiMAX network analysis would require High resolution cartography. The DEM is a digital terrain model describing ground heights and a buildings elevation model combined. It describes the maximum or canopy height at any point on the ground. It is described generally by a matrix of points in the x and y or Eastings and Northings directions with the axes aligned to a chosen coordinates system. The matrix has a given resolution. For planning mobile systems and for microwave systems where every path will be surveyed a resolution giving a height point every 50 metres is usable. For PMP networks at 5 GHz, we need to achieve a resolution of nearer 5 meters to position nodes and subscribers more precisely. In the z direction we need to specify a height. Given a Fresnel zone radius of 2.7 meters it would seem excessive if we had a resolution of 10 centimeters and provided that we have captured the maximum height at any point within the 1 meter matrix, a 1 meter z resolution is adequate. Of critical importance is the degree of error in positioning the matrix in the x and y directions and in specifying the height at each point. This error is a function of the way in which the data has been captured and processed to yield the DEM. Most high resolutions are developed from aerial survey either using downward looking radar or laser or the interpretation of stereo photographs. The methods are really beyond the scope of a brief presentation but the key issue is simply this. However produced, the planning engineer must have a specification of the DEM showing both resolution and error. For the two airports considered high resolution data are as follows: • • • DTM (Digital Terrain Model) + clutters for Toulouse’map DEM (Digital Elevation Model) for Barajas’ map (buildings merged with ground) Resolution: 5m Propagation models The global propagation model is a combination of the following models: • • • • Free space: ITU-R P.525 model Diffraction geometry: Deygout 94 method Sub-path attenuation: Standard model Reflection coefficient: clutter dependant Parameters considered for simulations General 802.16e parameters • • Signal TDD 5MHz PUSC segmentation 8 Note: Reflection is considered in the simulations if clutter data are available. © EUROCAE, 20XX 206 Base Stations & Mobile stations • General radio parameters found in Table 2 and Table 3 of [10], Cable and implementation losses, Noise Factors, sub-channelization gain, … • Receiving threshold considered in the DL (to establish coverage maps): -92.4 dBm (which corresponds to MS sensitivity for QPSK ½ - CC in table 1 of [10]) • Receiving threshold considered in the UL: -96 dBm (which corresponds to BS sensitivity for QPSK ½ - CC, as calculated in UL link budget in table 27 of reference [10]) • Specific parameters for coverage analysis: BS sectorized antenna 15dBi : 110° Azimuth ; 7° Elevation, Downtilt = 4.5° BS antenna height above ground = 38m MS omnidirectionnal dipole antenna 6dBi MS antenna height above ground = 10m (for A/C) and 2m (for vehicles) • Specific parameters for interference simulations RAMP Stations: Req (C/N)+I = 14dB (UL) and 15dB (DL) GROUND & TOWER Stations: Req (C/N)+I = 5dB (UL) and 4.5dB (DL) Antenna diagram for BS: Figure 6763: Horizontal and Vertical pattern for Base Stations (H: 3dB beamwidth = 110°; V: 3dB beamwidth = 12° (tbc)) © EUROCAE, 20XX 207 D.2 Case study 1: AeroMACS Deployment at Barajas Airport This appendix deals with the special case of AeroMACS deployment in the airport of Madrid Barajas as a specific example that can serve as a guideline. While many generic results and statistics shown in Appendix C and C.2. have been extracted by modelling scenarios in this airport (to have a real base for results), the specific cell planning proposed for the airport surface is shown in this section. First, a review is done on the BS site features and limitations applicable to Barajas. Second, cells are distributed in line with the capacity needs in the respective operational domains. Then, it is verified that the coverage from all the BS sites is acceptable in terms of received signal quality in the whole airport surface. Madrid Barajas is a large airport with four runways placed in two far dual parallel configurations (North-South axis 36L/18R 36R/18L – Northwest-Southeast axis 15L/33R 15R/33L). The estimated air traffic operating on the surface at a given moment is 50 A/C. Terminal layouts comprise the usual configurations for busy airports (linear and circular), plus a linear satellite terminal (T4S). Few transport areas are present in the surface. Terminal zones are mixed with taxiing and runway zones in a complex manner leaving the two runway domains separated. Due to this, GND/TWR domain has been covered separately for the North and South taxi and runway zones. In both domains, BS have been planned to cover the airport surface, while RAMP has been planned taking into account the placement of the served aircrafts close to the terminal when doing turn-around. The central axe, together with the taxiing between Terminal 4 and Terminal 4S can be covered with the RAMP sectors. Care has been taken to place the BS respecting the distances from runway and taxiways specified in [13], while no BS has been placed to point to terminal roofs in order to avoid reflections towards Globalstar. Antennas are 120º sectorized, in order to provide enough sectorization gain but avoid losses due to blocking small apertures. No MLS system operates in the airport. © EUROCAE, 20XX 208 Decimal values BS1 R1 40,476480 -3,572308 BS2 R2 40,466718 -3,569294 BS3 R3 40,455423 -3,577383 BS4 R4 40,492297 -3,590215 BS5 R5 40,48609 -3,591489 BS6 R6 40,491917 -3,569112 BS7 R7 40,458611 -3,563703 BS8 R8 40,496012 -3,566917 BS9 R9 40,462429 -3,571356 BS10 R10 40,497028 -3,593169 BS1 G1 40.486958° BS2 G2 40.473978° BS3 G3 40.512807° 3.571404° 3.548213° 3.566953° 40° 29' 13,05'' 40° 28' 26,32'' 40° 30' 46.11" Longitude RAMP GND TWR Hex values Latitude 40° 28' 35.33" 40° 28' 0.18" 40º 27' 19.5228" 40º 29' 32.2692" 40º 29' 9.9234" 40º 29' 30.9012" 40º 27' 30.999" 40º 29' 45.6432" 40º 27' 44.7444" 40º 29' 49.3008" Latitude Longitude -3° 34' 20.31" -3° 34' 9.46" -3º 34' 38.5788" -3º 35' 24.774" -3º 35' 29.3604" -3º 34' 8.8032" -3º 33' 49.3302" -3º 34' 0.9012" -3º 34' 16.8816" -3º 35' 35.4084" -3° 34' 17,05'' -3° 32' 53,57'' - 3° 34' 1.03" Sectors Sectors s1 s2 s3 2 0° 120° 240° 2 0° 120° 240° 2 0° 120° 240° 2 0° 120° 240° 2 0° 120° 240° 3 0° 120° 240° 2 0° 120° 240° 3 0° 120° 240° 1 0° 165º 240° 1 0° s1 120° s2 240° s3 3 0° 120° 240° 3 0° 120° 240° 2 0° 120° 240° Table 80: BS coordinates proposed for Madrid Barajas planning gray 1 G1s1, G2s3 white 6 R1s1, R3s3, R8s2 green 2 G1s3, G3s2 pink 2 7 R1s3, R8s1, R10s3 pink 3 G1s2 orange 8 R2s1, R4s1, R7s2 red 4 G2s1 green 2 9 R2s3, R4s3 black 5 G2,s2, G3s3 yellow 10 R3s1, R5s1, R6s3 blue 11 R5s3, R7s1, R8s3 black 12 R6s2 red 13 R6s1, R9s2 Table 81: Frequency re-use planning proposal Note that the tables above refer to physical and logical frequencies respectively. Among the logical frequencies, 1-5 are frequencies used in GROUND while 6-13 are frequencies used in RAMP. Frequencies 12 and 13 in RAMP are physically the same as frequencies 4 and 5 in GROUND, © EUROCAE, 20XX 209 respectively. They have been re-used since they do not alter the frequency reuse scheme due to enough distance between emitting BS, thus avoiding intra-system interference limitations. The tables above and the figure below depict the cell planning proposed for Madrid Barajas, which matches the network used to evaluate the AeroMACS Capacity in Appendix C.2. In the picture, the use of each of the 11 available channels is illustrated per colour. The sector size corresponds to the maximum range attainable considering the pathloss model in Barajas outlined in [7]. Note that sectors in RAMP have a transmission power of 23 dBm similar to GROUND and TOWER, but sizes of the coverage at 64QAM in the DL and 16QAM in the UL are depicted to illustrate the conformance to the high capacity requirements stated in [1]. It can be observed that a new sector could be activated in the Tower1 BS if the northern runway area is deemed necessary to cover (e.g. for surface vehicle applications). Otherwise, it is estimated that it is not used by aircraft services, and thus being inactive in order to minimize interference with Globalstar. © EUROCAE, 20XX 210 Figure 6864: Proposed cell planning in Madrid Barajas Below the optional cell planning proposed in Appendix C.2 for handover optimisation is shown. Note that, in this configuration, the number of sectors remains the same, however the BS’s have been moved and a new site exists, in order to increase the signal quality at the cell edge between BS participating in handover processes. © EUROCAE, 20XX 211 © EUROCAE, 20XX 212 Figure 6965: Proposed cell planning in Madrid Barajas – Closer distance between BS in handover Below the cell planning showing only RAMP cells is depicted. Note that RAMP cell edges show the maximum range using 16QAM so, as it was indicated; RAMP cells in North terminals (T4 and T4S) are enough to cover the taxi ways between them by covering them with QPSK. As it can be seen, the sites to cover RAMP zone have been placed on towers and in the edge of buildings in order to cover the line where aircrafts are likely to stay when performing turn-around. Figure 7066: Proposed cell planning in Madrid Barajas – RAMP only © EUROCAE, 20XX 213 With the proposed cell planning, the following aspects regarding sector layout and capacity distribution of the AeroMACS deployment can be extracted. The data rate interval has been obtained by multiplying the number of sectors by the possible data rate offered per sector (which yields an interval depending on which modulation scheme is used for the subscriber, QPSK – 64QAM in downlink, QPSK – 16QAM in uplink). Zone # sites # channels Data rate per domain 10 # BS (sectors) 20 RAMP 6+2 * 3 8 5 19.6 – 71.9 Mbps (DL) 10.6 – 24.7 Mbps (UL) 7.9 – 28.8 Mbps (DL) 4.3 – 9.9 Mbps (UL) GND/TWR Avg BS distance 810 Tx power 23 dBm 2650 ** Table 82: Capacity planning figures in Madrid Barajas * RAMP uses two channels also used in GND/TWR ** This average distance is reduced if the optional cell planning to optimize handover is deployed Finally, the coverage of the airport surface considering the proposed cell planning has been verified with a coverage simulation tool. In these simulations, a free space propagation model added to a fading value caused by the reflections on buildings and aircrafts distributed on Barajas surface has been used to calculate the signal level received at every point of the map. DTM maps have been applied together with information on the clutter and the refraction values of the buildings, instead of applying a generic fading model as was done in the tool for Capacity Analysis. In this case, Free Space propagation mode ITU-R P.525 with Deygout 94 method for diffraction geometry have been applied to obtain the tracing model per point. D.2.1 Global radio coverage in Barajas airport (DL) Barajas’ airport is taken as an example in order to estimate range and intra-system interference in case of frequency re-use using all the frequency slots available in the AeroMACS band. The radio coverage is a DL estimation of the maximum range mainly driven by the BS transmitted power, BS antenna gain, MS antenna gain and MS sensitivity. It is driven by hypothesis made on capacity (see section Error! Reference source not found.11.1.2) which led to 28 sectorized BS. Because of limitation of map area available, few BS are not activated in the simulation. Thus 24 BS are activated for coverage analysis, whose names are given in the following Figure. All BS are positioned at 38m height relative to ground. © EUROCAE, 20XX 214 Figure 7167: Focus on BS position and label on Barajas’ airport The global DL, in a composite server display, has been computed and its coverage map is given below for two MS types, aircrafts (with Hant = 10m) and vehicules (with Hant=2m). © EUROCAE, 20XX 215 Figure 7268: Global coverage (DL) in composite server display: Vehicules with Hant=2m(left) – Aircrafts with Hant=10m (right) We first note that the Barajas’ airport is fully covered by the 24 BS activated in the simulation software. The color legend shows the modulation scheme available at different location on the map, starting from the more efficient modulation scheme (in red) to the less efficient one (in dark blue). Then, we can observe the difference in power collected by the MS in both cases. To be more specific in range values, we are going to focus in the next sub-section on one of the BS installed in the RAMP area. © EUROCAE, 20XX 216 MS category (antenna height/groun d) Vehicules (h=2m) Aircrafts (h=10m) 64QAM 3/4 64QAM 2/3 64QAM 1/2 16QAM 3/4 16QAM 1/2 QPSK 3/4 QPSK 1/2 1000 1260 1560 1950 2940 3600 5000 1000 1260 1560 1950 2940 3600 6000 Table 83: Calculation of cell range (DL in m) for each modulation scheme and MS category (based on R1s1 coverage, near LOS direction) © EUROCAE, 20XX 217 Figure 7369: R1s1 coverage for Hant=2m(left) and Hant=10m (right) The main range difference is visible on the; • Last modulation scheme (QPSK 1/2) for the range (6 Km instead of 5 Km), where aircrafts take benefits of a better radio range. • Better homogeneity of the power received at all positions, especially for 16QAM and QPSK modulations (light greens and blue color in Figure). The aircrafts (Hant=10m) will collect more signal than the vehicle (Hant=2m), operating with a better C/N value, and will of course keep the AeroMACS connection further on the airport. The focus on one BS is mainly interesting for range estimation and visualization of directions where occur direct obstruction to LOS. The aim of the next table is to estimate the reachable range for NLOS directions. © EUROCAE, 20XX 218 MS category (antenna height/groun d) Vehicules (h=2m) Aircrafts (h=10m) 64QAM 3/4 64QAM 2/3 64QAM 1/2 16QAM 3/4 16QAM 1/2 QPSK 3/4 QPSK 1/2 600 700 1800 * * 800 1500 1800 ** ** Table 84: Calculation of cell range (DL in m) for each modulation scheme and MS category (based on R1s1 coverage, NLOS direction) Note *: Not really appreciable due to other main obstructions to signal Note **: Depending on the location of the antenna system on the A/C, mask can occur some of the time, compensated by the visibility of other BS on the airport where the AeroMACS system is deployed. Generally speaking, if we focus on specific area of the composite radio coverage, we observe inhomogeneous colors, thus inhomogeneous modulation and data bit rates. This is either due to masked area (below BS that are installed at the top of high towers or buildings), or area where interference due to reflections occurs, leading to fading events, and thus to less effective modulation scheme. D.2.2 Radio coverage limited by the Uplink (UL) Radio coverage is always in DL, but may appreciate limitation of the coverage by the MS ability to communicate with BS. We could use the “reverse radio coverage” terminology, or “radio coverage limited by the UL”. Comparison between radio range (DL) and radio reverse range The radio coverage that gives the area in which a connection may be established between a MS and a BS is mainly driven by the MS antenna gain, MS transmitted power, UL sub-channelization gain, BS antenna gain and BS sensitivity. This range is often different from the DL radio coverage because of an unbalance between the two DL and UL budget link (Cf. budget link tables). This budget link unbalanced is around 6dB, considering the simulation hypothesis taken. If we consider this unbalanced in the simulation tool, we get the following figures for the global radio coverage. © EUROCAE, 20XX 219 Figure 7470: Global coverage (limited by UL) in composite server display: Vehicules with Hant=2m (left) – Aircrafts with Hant=10m (right) The airport is still covered, but It can be observed that the • • highest modulation scheme are less available than in normal DL coverage, especially the 64QAM3/4 for MS on vehicles, radio coverage % of the airport is reduced in the BS configuration chosen (head of two takeoff runways are no longer covered). Full coverage is still accessible if positions of BS are modified (radio planning has been made in order to optimize the capacity). Note: Hypothesis made in DL & UL Link Budget Tables can also be reviewed Focus on R1s1 case, Hant=10m The radio coverage is shown below © EUROCAE, 20XX 220 Figure 7571: R1s1 radio coverage (limited by UL), Aircrafts with Hant=10m Coverage convention DL (from previous tab) DL limited by the UL (current case) 64QAM 3/4 64QAM 2/3 64QAM 1/2 16QAM 3/4 16QAM 1/2 QPSK 3/4 QPSK 1/2 1000 1260 1560 1950 2940 3600 6000 500 630 800 1000 1500 1900 3600 Table 85: DL coverage and reverse coverage Processing a radio coverage limited by the UL leads to a factor 2 degradation in range, as it was predictable by the physics law. These data can be compared to data in section 12.1.1.5.3 (NLOS Munich, NLOS Barajas range estimation). Note that we are more in “near LOS case” than in a rigorous NLOS case. D.2.3 Conclusions and recommendation Radio coverage depends on radio parameters, directly linked to AeroMACS device, but also to the position of such equipment and especially; • Position of BS device on building (height over ground) = h1. The highest the building or available infrastructure, the longer the reachable range © EUROCAE, 20XX 221 • Position of antenna on BS device = h2 (h3 = h1 + h2 = height of antenna over ground) and relatively to local environment. In order to optimize the performances and use the full device capacity, the antenna must be installed in a clear environment, away from any obstacle (LOS situation). • Antenna tilting for BS device. After initial simulations for the Barajas case, a – 3° was considered . Of course, this parameter has to be adjusted and cannot be taken as a rule for the other airports. It has to be reconsidered for each airport, because it is linked to infrastructure availability (height of buildings), and to coverage goals. In RAMP area, operators would like to increase the BS antenna downtilt, in order to favor the power distributed close to the gates. On the other hand, if a maximum coverage has to be achieved, the BS antenna tilt would have to be moderate. Thus, a trade off will be necessary for each airport. As a result of this Barajas study and as is stated in 9.2.1.48.2.4, we can assume that very large airports will have similar coverage requirements as large airports around terminal areas. For GROUND and TOWER areas there may be a need to add one or two additional sectorized BSs to cover all 5 runways with accompanying taxiways. © EUROCAE, 20XX 222 D.3 Case study 2: AeroMACS Deployment at Toulouse Airport D.3.1 Global radio coverage in Toulouse airport For this small airport, a limited number of BS’s has been considered , leading to deployment of 3 sectors, covering the gates and the runways. BSs1; 5100 MHz; GPS = 43° 38’ 22.5” N / 1° 22’ 40” E; Hant = 45 m BSs2; 5110 MHz; GPS = 43° 38’ 22.5” N / 1° 22’ 40” E; Hant = 45 m BSr1; 5130 MHz; GPS = 43° 37’ 22.5“ N / 1° 22’ 48“ E; Hant = 35 m The radio coverage is a DL estimation of the maximum range mainly driven by the BS transmitted power, BS antenna gain, MS antenna gain and MS sensitivity. The computed figures (taking into account waves reflection) are shown below. DL coverage Figure 7672: Global coverage (DL) in composite server display: Vehicules with Hant=2m(left) – Aircrafts with Hant=10m (right) We observe few differences, with a better coverage for aircrafts, mainly in specific areas (see arrows) © EUROCAE, 20XX 223 DL coverage limited by UL Let’s consider now a coverage limited by the UL: Figure 7773: Global coverage for aircrafts (Hant = 10m) in composite server display: DL coverage(left) – DL coverage limited by UL (right) We observe that the covering is achieved on the airport area in both case, but the highest modulation (64QAM ¾) is not available for BS1 (sectors 1 and 2) because of the antennas heights and low downtilt selected. If we increase the latter, we should increase the capacity available close to BS1 (see next figure), but reduce range. © EUROCAE, 20XX 224 Figure 7874: Global coverage for aircrafts (Hant = 10m) in composite server display: DL coverage limited, no reflections considered Downtilt for BS1 (s1 & s2) has been increased from 5 to 7° Ranges © EUROCAE, 20XX 225 Figure 7975: BS2 coverage - Aircrafts with Hant=10m, no reflections considered DL (left) - DL limited by UL (right) Coverage convention DL DL limited by the UL 64QAM 3/4 64QAM 2/3 64QAM 1/2 16QAM 3/4 16QAM 1/2 QPSK 3/4 QPSK 1/2 600 410 750 480 900 560 1000 650 1500 910 1800 1000 3000 1750 Table 86: BS2 Range for DL and DL limited by UL D.3.2 Simulation of inter-system interferences in Toulouse Purpose of the study The purpose of this study is the compatibility analysis between two different telecommunication systems; an existing MLS system and an AeroMACS deployment, operating in the same band and in the same area (around the Toulouse-Blagnac airport in France). In order to derive general rules, we will consider the worst case, and then make recommendations. More particularly, the calculations performed here will take care of : - interference due to AeroMACS transmitters (3 stations) on MLS receivers (2 stations); - interference due to MLS transmitters (2 stations) on AeroMACS Base stations (Uplink on 3 stations); - interference due to MLS transmitters (2 stations) on AeroMACS receivers (Downlink for mobiles). © EUROCAE, 20XX 226 Figure 8076: Localization of AeroMACS BS (in red, BS Tower with 2 sectors BSs1 and BSs2) and Tx MLS Stations (MLS AZ and MLS El in yellow) and Rx MLS Stations (Rx Az and Rx El in magenta) Cartographic database The different cartographic layers used in this study are described as follows : - a digital terrain model with 5m resolution providing the altitude of the terrain on any point; an image with 2.5m resolution used in the background; a building layer describing the height and the shape of each building in the area; a clutter layer with 5m resolution containing four classes describing the nature of the ground: open area, building, water and vegetation. Propagation model The following propagation model has been chosen : - free space losses according to the ITU-R P.525 recommendation, diffraction according to the Deygout 1994 model, © EUROCAE, 20XX 227 - and "standard integration" model for the sub-path attenuation. Network and Simulation parameters MLS transmitting station Tx The MLS transmitting radio station parameters as well as the radiation patterns of the antennas connected are described below. Name Coordinates Nominal Power Frequency (Bandwidth) Antenna Gain Antenna 3dB Beam width (az) Antenna 3dB Beam width (el) Height above the Ground Azimuth / North Tilt (>0 Uptilt) Azimuth Ground 43°36' 56.7725"N / 1°22' 31.5807"E 30W 5038.8MHz (CW for beam scanning) / (300kHz for DPSK) 27dBi (scanning) / 12.5 dBi (DPSK) 1.65° (scanning) / +/- 50° (DPSK) 0-20° 1.5 m 310° 0° Name Coordinates Nominal Power Frequency (Bandwidth) Antenna Gain Antenna 3dB Beam width (az) Antenna 3dB Beam width (el) Height above the Ground Azimuth / North Tilt (>0 Uptilt) Elevation Ground 43°38' 33.1581"N / 1°20' 57.0729"E 30W 5038.8MHz (CW for beam scanning) / (300kHz for DPSK) 22dBi (scanning) / 12.5 dBi (DPSK) 1.3° (scanning) / +/- 50° (DPSK) 0-20° 2.5 m 310.00 0° Table 87: Azimut and Elevation Tx MLS Station parameters Note : The simulations have been done for the worst case, i.e. the gain of the scanning signal has been considered for the calculations, as for the bandwidth and the horizontal aperture of the DPSK signal. © EUROCAE, 20XX 228 Figure 8177: Radiation patterns attached to each MLS transmitting station Operational coverage A/C landing Figure 8278: Schematic representation of Tx MLS stations H patterns over Toulouse airport MLS receiving station Rx © EUROCAE, 20XX 229 The MLS receiving radio station parameters as well as the radiation patterns of the antennas connected are described below. Name Location Coordinates Frequency (Bandwidth) Antenna Gain Antenna 3dB Beam width (az) Antenna 3dB Beam width (el) Noise factor KTBF Height above the Ground Azimuth / North Tilt (>0 Uptilt) Monitor angle Azimut 30m in front of AZ Tx station 43°36'57.5"N / 1°22'30.7"E 5038.8MHz (60 MHz) no selectivity 10dBi +/- 50° 12° 11 dB -108dBm 2m 310° 0° Name Location Coordinates Frequency (Bandwidth) Antenna Gain Antenna 3dB Beam width (az) Antenna 3dB Beam width (el) Noise factor KTBF Height above the Ground Azimuth / North Tilt (>0 Uptilt) Monitor angle Site 30m in front of EL Tx station 43°38'32.3"N / 1°20'57.7"E 5038.8MHz (300kHz) 10dBi +/- 50° 12° 11 dB -108dBm 2m 310° 0° Table 88: Azimut and Elevation Rx MLS station parameters © EUROCAE, 20XX 230 Figure 8379: Radiation patterns attached to each MLS receiving stations AeroMACS transmitting stations The main parameters for AeroMACS radio transmitters and their antennas are described below. Site Name Longitude (DMS) Latitude (DMS) Tower Tower VHF BSs1 BSs2 BSrs1 1.2204 1.2204 1.2248 43.38062 43.38062 43.37225 Site Tower Tower VHF Name BSs1 BSs2 BSrs1 Azimuth (°) 280 170 300 Tilt (°) -3 -3 -3 Nom. Power (W) 0.2 0.2 0.2 Antenna (m) 45 45 30 Tx Ant. Gain (dBi) 15 15 15 Frequency (MHz) 5038.8 5038.8 5038.8 Tx/Rx Losses (dB) 8 8 8 Bandwidth (kHz) 5000 5000 5000 Rad. Power (W) 0.61098 0.61098 0.61098 KTBF (dBm) -96 -96 -96 Table 89: Parameters of AeroMACS stations Figure 8480: Radiation patterns of antennas attached to AeroMACS stations AeroMACS receiving stations © EUROCAE, 20XX 231 For receiving Mobile Stations, an omnidirectional antenna has been considered, 2m over ground, taking into account a minimum coverage threshold of -92dBm, with a KTBF value of -98dBm. Interference parameters In the whole study, all transmitters are supposed to be operating at the same frequency and no rejection on the interfering signals (except the power diffusion effect) has been considered. In case of a AeroMACS signal with 5MHz bandwidth is interfering a MLS signal with 300kHz bandwidth at the same frequency, the power diffusion effect will reduce the interfering power of • 10*log(300/5000) = -12.2dB The interference levels are considered as the sum of all interferers and are expressed in terms of Threshold Degradation (TD in dB) defined by : • TD (dB) = 10*log((Sum(I)+KTBF)/KTBF) A common value used for the maximum TD value to consider that there is no significant interference is between 1 and 3dB. Results Interference on MLS receiving stations According to the above assumptions, the TD is computed on the 2 MLS receiving stations with the 3 AeroMACS base stations considered as interferers. The results are given below. © EUROCAE, 20XX 232 Wanted station (Rx) Rx Az MLS Rx Az MLS Rx Az MLS Rx El MLS Rx El MLS Rx El MLS Rx KTBF (dBm) -108 -108 -108 -108 -108 -108 Interferer (Tx) AeroMACS Tx BSs1 AeroMACS Tx BSs2 AeroMACS Tx BSrs1 AeroMACS Tx BSs1 AeroMACS Tx BSs2 AeroMACS Tx BSrs1 Unwanted Power (dBm) TD (dB) Cumulated TD (dB) Rejection (dB) Tx BW (kHz) Rx BW (kHz) Distance Tx-Rx (m) -103.58 5.76 5.76 12 5000 300 2205.3 -95.44 12.79 13.38 12 5000 300 2205.3 -95.58 12.67 15.94 12 5000 300 863.69 -114.03 0.97 0.97 12 5000 300 1694.96 -128.92 0.03 1 12 5000 300 1694.96 -122.95 0.14 1.1 12 5000 300 3286.27 Table 90: TD calculation for Interference on MLS receiving stations In order to avoid interference from AeroMACS stations on MLS receivers, an additional rejection of 16dB would be required. This rejection might be provided by a combination of receiving filters and frequency separation between the 2 systems. Using adjacent frequencies might be enough, but this has to be confirmed by a further analysis requiring more detailed information about the MLS receivers (rejections). Interference on AeroMACS base stations According to the above assumptions, the TD is computed on the 3 AeroMACS stations (Uplink) with the 2 MLS transmitting stations considered as interferers. The results are given below. Wanted station (Rx) AeroMACS Rx BSs1 AeroMACS Rx BSs1 AeroMACS Rx BSs2 AeroMACS Rx BSs2 AeroMACS Rx BSrs1 AeroMACS Rx BSrs1 Rx KTBF (dBm) Interferer (Tx) Unwanted Power (dBm) TD (dB) Cumulated TD (dB) Rejection (dB) Tx BW (kHz) Rx BW (kHz) Distanc Tx-Rx (m) -96 Tx Az MLS -56.99 39.01 39.01 0 300 5000 2234.67 -96 Tx El MLS -81.96 14.21 39.03 0 300 5000 1720.27 -96 Tx Az MLS -48.71 47.29 47.29 0 300 5000 2234.67 -96 Tx El MLS -96.85 2.61 47.29 0 300 5000 1720.27 -96 Tx Az MLS -48.94 47.06 47.06 0 300 5000 877.1 -96 Tx El MLS -90.89 6.28 47.06 0 300 5000 3314.11 Table 91: TD calculation for Interference on AeroMACS base stations In order to avoid interference from MLS transmitters on AeroMACS base station receivers, an additional rejection of 48dB would be required. This rejection might be provided by a combination of © EUROCAE, 20XX 233 receiving filters and frequency separation between the 2 systems. Using a frequency separation of 2 channels (N+/-2) might be enough, but this has to be confirmed by a further analysis requiring more detailed information about the AeroMACS receivers (out of band rejection). Interference on AeroMACS receiving stations According to the above assumptions, the TD is computed over the AeroMACS downlink coverage (where the AeroMACS mobile receivers are) with the 2 MLS transmitting stations considered as interferers. The results are given in the following maps : • On a first simulation, Threshold degradation map on AeroMACS DL coverage interfered by Tx MLS stations have been computed, without any rejection applied. © EUROCAE, 20XX 234 Figure 8581: Threshold Degradation map for Tx MLS vs. AeroMACS DL coverage - No rejection • On a second simulation, Threshold degradation map on AeroMACS DL coverage interfered by Tx MLS stations have been computed, with a rejection of 70dB applied on each interferer Figure 8682: Threshold Degradation map for Tx MLS vs. AeroMACS DL coverage – 70 dB rejection In order to have a limited interfered area from MLS transmitters on AeroMACS mobile receivers, an additional rejection of 70dB would be required. In that case, only areas very close to the MLS transmitters (in magenta) will be interfered. This rejection might be provided by a combination of receiving filters and frequency separation between the 2 systems. Using a frequency separation of 3 channels (N+/-3) might be enough, but this has to be confirmed by a further analysis requiring more detailed information about the AeroMACS receivers (out of band characteristics). © EUROCAE, 20XX 235 Conclusion In order to be able to share the same band between the MLS service and the AeroMACS service, a rejection of 70dB in the worst case should be applied on interferers. This rejection might be provided by a combination of receiving filters and frequency separation between the 2 systems. Using a frequency separation of 3 channels (N+/-3) might be enough, especially with the pessimistic approach used in this study, but this has to be confirmed by a further analysis requiring more detailed information about the MLS and AeroMACS receivers. In case of Toulouse airport, the MLS center frequency (5038,8 MHz) is separated from 52 MHz from the lower AeroMACS frequency (5091 MHz), which means a frequency separation of more than 10 channels. Thus we can conclude than no interference would occur between already deployed MLS and future AeroMACS prototypes to deploy on Toulouse airport. © EUROCAE, 20XX 236 Appendix E WG-82 MEMBERSHIP Include a list of all WG members and contributors. This is a mandatory annex. Name Company or Organisation © EUROCAE, 20XX 237 IMPROVEMENT SUGGESTION FORM This is a mandatory annex – do not change. Name: Company: Address: City: State, Province: Postal Code, Country: Date: Phone: Fax: Email: Document : ED[ ] [ ] [ ] / DO- Sec: Page: Documentation error (Format, punctuation, spelling) Content error Enhancement or refinement Rationale (Describe the error or justification for enhancement): Proposed change (Attach marked-up text or proposed rewrite): Please provide any general comments for improvement of this document: Return completed form to: EUROCAE Attention: Secretariat General 102 rue Etienne Dolet 92240 Malakoff - France Email: [email protected] Fax: +33 (0) 1 40 92 79 30 © EUROCAE, 20XX Line:



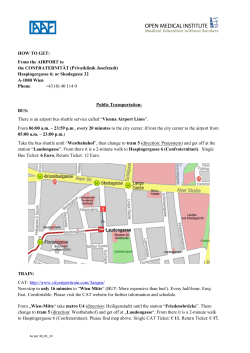

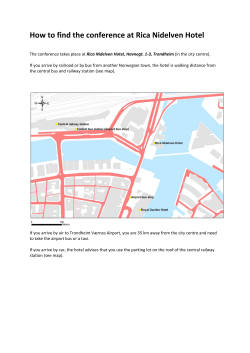


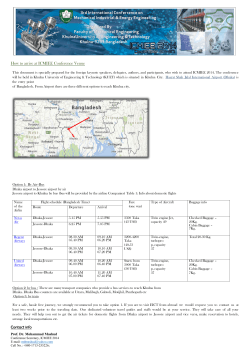
© Copyright 2026