
Accurate ARL Calculation for EWMA Control Charts
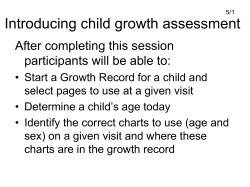
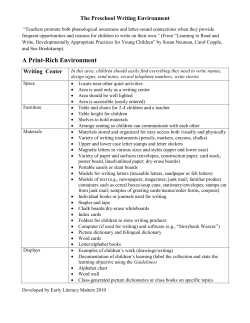
Accurate ARL Calculation for EWMA Control Charts Monitoring Simultaneously Normal Mean and Variance Sven Knoth Advanced Mask Technology Center, Dresden, Germany Abstract: EWMA control charts designed for monitoring the variance or the mean and the variance of a normally distributed variable are either based on the log transformation of the sample variance S 2 or provide only rough ARL results. Gan (1995), as the most prominent example for the simultaneous case, calculated ARL ¯ S 2 EWMA schemes. The results in Knoth and Schmid values precisely for X-ln 2 ¯ (2002) for X-S ones are less accurate than the former one. The reason behind the lacking precision is that the methods usually applied for ARL calculation are not able to handle the restricted support of the chart statistic (S 2 and, of course, S and the range R are non-negative random variables). While in Knoth (2005) this problem is treated for single variance monitoring by solving integral equations with collocation methods, this paper employs collocation and ideas similar to Gan ¯ 2 EWMA control charts. (1995) in order to obtain accurate ARL values of X-S Additionally, the appropriate choice of the non-symmetric control limits for the S 2 part of the scheme is addressed. Keywords: Average Run Length; Collocation; Computational methods; Control chart design; Exponentially Weighted Moving Average. Subject Classifications: 62L10; 60J22; 47N30; 65M70. Address correspondence to S. Knoth, AMTC Dresden, Postfach 110161, D-01330 Dresden, Germany; Fax: +49-351-4048 9158; E-mail: [email protected] 1 1. INTRODUCTION Control charts – core tools of Statistical Process Control (SPC) – are used to monitor certain parameters of one or more (random) variables over time. The main parameter of interest is the mean of the considered variable. Additionally, the performance of the variance plays a crucial role when applying a control chart. For instance, the setting of control limits is based on reliable, preliminary estimates of the variance. Thus, if the variance changes during monitoring, then the average time until an alarm, false or right, is affected. The most unpleasant case occurs when the mean changes and the variance decreases at the same time. Then, usually, more time is needed to detect the mean change than initially expected. Additionally, a changed (mostly increased) variance is of importance of its own. To sum up, simultaneous monitoring of mean and variance seems to be a quite reasonable task. Eventually, SPC software packages tend to favor most frequently X-MR (MR – ¯ ¯ ¯ control Moving Range), X-R, or X-S control charts over single X or X charts. In practice, many control charts are applied at the same time. In general, their joint behavior is not regarded; this is true even for charts which are designed for the same unit. For example, in the previously mentioned simple Shewhart control charts the control limits are seldom corrected to ensure a certain behavior of the simultaneous charting scheme. It is quite simple to obtain the same performance measures for the combined schemes as for the single ones, if we consider only Shewhart charts. If we are interested in applying more complex control charts such as EWMA (Exponentially Weighted Moving Average) or CUSUM (Cumulative Sum), then we have to face more complex problems. There are several ways to form EWMA control charts with the objective of monitoring mean and variance at the same time. Recall the so-called omnibus charts in Domangue and Patch (1991) that exploit only a single characteristic. Gan (1995) wrote a paper which plays an important rule in the area of simultaneous EWMA charts. He demonstrated that EWMA ¯ and ln S 2 , that is, the natural logarithm of the sample schemes based on X variance, perform quite well and dominate the preceding omnibus charts. Additionally, he equipped the SPC public with a numerical tool to determine the Average Run Length (ARL) of combined EWMA (and CUSUM as well) schemes. The ARL – the average number of subgroups or individual observations counted from monitoring startup, where it is assumed that the change in the mean and/or variance happens only at the beginning – is the most popular performance measure for control charts. Thus, there is high 2 interest in methods to compute this value in a quick and accurate manner. Unfortunately, Gan’s original approach works only for ln S 2 . The same could be observed in papers about ARL computation for single variance control charts (see Knoth (2005) for more details). In Knoth and Schmid ¯ 2 EWMA scheme was analyzed, but with less ac(2002) the combined X-S curacy than Gan (1995) provided. Apart from some practical reasons (ln S 2 looks more “normal” than S 2 , the scale change is transformed to a step change, and the variance of ln S 2 does not depend on the actual value σ 2 ) one major reason drives the usage of ln S 2 – the numerical difficulties with S 2 . These difficulties vanish after the log transformation. For ln S 2 , the transition kernel of the EWMA sequence, more or less the distribution of the chart statistic, is smooth, while the original sample variance leads to a kernel which exhibits a non-smooth point. The latter is problematic for the well-known Brook and Evans (1972) approach (Markov chain approximation) and for the so-called integral equation approach as well. See Reynolds and Stoumbos (2001a,b, 2004) for a discussion of these nasty problems. However, they do not provide any suitable calculation method – their results rely mainly on Monte Carlo studies. Refer to Knoth (2005) for a more comprehensive study of ARL calculation methods. Thereby, mean as well as variance EWMA control charts are considered. Hence, there are two obstacles in the way of calculation of the ARL of combined EWMA control charts for monitoring mean and variance based on S 2 (or S), (i) the difficulties that stem from the coupling of single charts which was suitably solved by Gan (1995), (ii) the subtle character of the S 2 related transition kernel which was treated in Knoth (2005). The objective of this paper is to combine ideas of both papers for getting a feasible calculation ¯ 2 EWMA control charts. method of the joint ARL of X-S ¯ 2 EWMA CONTROL CHARTS 2. X-S Let {Xij } be a sequence of subgroups (samples, batches) of independent and normally distributed data. Each subgroup i consists of n observations Xi1 , . . . , Xin . The subgroup size n can be equal to 1 if we utilize not the usual sample variance S 2 but a variance estimator that employs the actual mean (Reynolds and Stoumbos 2004, who preferred this version). In this paper, which focuses more on calculation methods than on applicational issues, this differentiation is not that important because of the equivalence (in the in-control case, otherwise the non-central χ2 -distribution prevents that) of both approaches in terms of the ARL calculation, if the degrees 3 of freedom in the variance part is re-adjusted. In the sequel we restrict ourselves to the usual sample variance S 2 . The parameters of the normal distribution are the mean µ and the variance σ 2 . Usually, we are interested in detecting changes in both directions of µ and increases of σ 2 . Additionally, we consider here schemes which provide signals in case of decreased variance so that we might be aware of missing signals in the mean chart. For the topic of misleading signals we refer to Morais and Pacheco (2006). To sum up, we consider joint schemes which combine two-sided mean control charts with one-sided upper and two-sided variance control charts, respectively. To begin with, let us collect some suitable notation. The parameter values, which describe the stable performance of the monitored process, are µ0 and σ02 . As long as the stable and the actual parameter values coincide we call the process “in-control”: it is otherwise “out-of-control” (unfortunately, we have to base our decision on data and not on exact knowledge of µ and σ). ¯ 2 EWMA control charts are based on the two EWMA sequences Then, X-S µ {Zi } and {Ziσ }, that is, n n X ¯i = 1 X Xij n Si2 z0µ Z0σ Ziσ j=1 Z0µ Ziµ = = (1 − µ λµ )Zi−1 1 X ¯i 2 , = Xij − X n−1 j=1 ¯i + λµ X = z0σ , σ = (1 − λσ )Zi−1 + λσ Si2 . The design parameters λµ and λσ are chosen from the interval (0, 1] to ensure a certain signaling behavior, where small values increase the detection power for small changes and vice versa. The starting values z0µ and z0σ are usually set to µ0 and σ02 , respectively. Then, as long the process is in control, the expectations of both EWMA sequences are equal to their target values. An alarm is given at time point L if at least one of the single charts signals, L = min{Lµ , Lσ } , ( s ) λµ σ0 √ Lµ = min i ∈ N : − µ0 | > := cµ , 2 − λµ n ( ) r r λ 2 σ Lσ = min i ∈ N : Ziσ − σ02 > c∗σ := cσ σ2 . 2 − λσ n − 1 0 |Ziµ c∗µ As usual, the alarm thresholds on the righthand sides of Lµ and Lσ are normalized with the asymptotic standard deviation of the chart statistics Ziµ 4 and Ziσ , respectively. The values cµ and cσ are called critical values. In the sequel, however, we utilize the starred versions. For the two-sided variance case we have to introduce a further limit because of the non-symmetric behavior of Si2 and consequently Ziσ (see Section 4). The previously mentioned ARL could be described as the expectation of L. To be precise, for fixed values of the so-called head starts z0µ and z0σ , and for given actual values of µ and σ, which are assumed to be valid for the whole averaging process, denote E(L) = E(L|µ, σ, z0µ , z0σ ) . Of course, as in the univariate case the Markov chain as well the integral equation approach could be established for the full 2-dimensional model. Both end in large dimensions of the resulting linear equation system if a reasonable precision is needed. See Knoth and Schmid (2002) for some results in that direction, where it had to be used for autocorrelated data. That approach becomes even more complex if one tries to employ the collocation ideas given in Knoth (2005). 3. ARL CALCULATION Ideas like in Gan (1995) that are based on Waldmann (1986) should be exploited in order to get a more feasible approach than the full 2-dimensional one. First, the parameters µ0 and σ02 are set to 0 and 1, respectively, for the sake of simplicity. Denote P (·) the probability measure of our series for a fixed parameter set of µ, σ, z0µ , z0σ . Then for any j ∈ N regarding the ¯ and S 2 independence of X P (L > j) = P (Lµ > j) P (Lσ > j) . Using the well-known relation E(L) = ∞ X P (L > j) j=0 and the geometric tail behavior of the distribution of L (see Waldmann (1986), Gan (1995), Knoth (1998), and Madsen and Conn (1973) – the essential assumption for the asymptotic geometric tail is some quasi-positiveness of the kernel of the joint scheme, which is mostly fulfilled for the considered control charts) allows us to establish the following ARL bounds: ARL± J = J−1 X j=0 P (L > j) + P (L > J) . 1 − m± J 5 The choice of the truncation point J relies on the distance between the bounds ARL± J and could be rather small for small distances already. The constants m± J are defined as in Waldmann (1986) and Gan (1995), that is, they stand for sup and inf of P (L > j; z0µ , z0σ )/P (L > j − 1; z0µ , z0σ ) over the permissible domains of starting values z0µ and z0σ . These values m± J converge rapidly to a common limit which resembles the eigenvalue of largest magnitude of the joint transition kernel. Waldmann (1986), and later Gan (1995), utilized quadrature rules in order to calculate numerically the values P (L > j) for j = 1, 2, . . . , J by means of the following iteration rule for the single control charts: ∗ P (Lµ > 1)(z0µ ) = Zcµ f (z0µ , z) dz , −c∗µ ∗ P (Lµ > j)(z0µ ) = Zcµ P (Lµ > j − 1)(z) fµ (z0µ , z) dz . −c∗µ Thereby, f (·) denotes the corresponding transition kernel, which is equal to z − (1 − λµ ) z0µ 1 µ fµ (z0 , z) = φµ,σ λµ λµ for the mean chart. φ(·) denotes the probability density function (pdf) of a normally distributed variable with mean µ and variance σ 2 . For the S 2 chart we have to use (and, of course, different limits in the integral) 1 2 n − 1 z − (1 − λσ ) z0σ n−1 σ fσ (z0 , z) = χ . 2 λσ σ λσ σ2 χ2 (·) denotes the pdf of a chi-squared distributed random variable with n − 1 degrees of freedom. Gan (1995) considered ln S 2 and obtained a different version of the variance chart transition kernel. Thus, he was able to approximate the integrals in both iteration sequences P (Lµ > j) and P (Lσ > j) with Gauss-Legendre quadratures with small absciccae numbers to ensure reasonable precision. Unfortunately, if we are interested in S 2 instead of ln S 2 , the same problem arises as for the single variance chart. In Knoth and Schmid (2002) both iteration sequences were approximated by terms, which come from the Markov chain approach. Instead of applying the truncation at a certain J the whole problem is transformed into a 6 Sylvester matrix equation system that is solved by employing a numerical library. Unfortunately, it inherits the precision losses from the S 2 part and, consequently, large matrix dimensions are needed to get higher accuracy. A small study should demonstrate the ability of different approaches to ¯ 2 EWMA control charts. Let deal with the subtle ARL calculation for X-S us consider: 1. Pure transfer of Gan (1995), who utilized Gauss-Legendre quadrature (GL) for calculating the iteration sequences P (Lµ > j) and P (Lσ > j), j = 1, 2, . . . 2. Apply the Simpson (S) rule instead of GL for the S 2 part. 3. Apply the midpoint rule instead of GL, which is equivalent to the popular Markov chain approximation (M 1) – Morais and Pacheco ¯ S 2 EWMA charts (for both the mean and (2000) utilized this for X-ln the variance chart). 4. Collocation (C) similar to Knoth (2005), described in more detail in the Appendix of this paper. 5. Like in Knoth and Schmid (2002), employ Markov chain approximation (M 2) for both charts and solve a Sylvester matrix equation. Note that with one exception (Sylvester matrix equation) all approaches ¯ part. The subgroup size use always Gauss-Legendre quadratures for the X n is equal to 5 like in Gan (1995). The smoothing parameters are taken as λµ = 0.134 from Gan (1995) and λσ = 0.1 that is more a first shot than a result of some optimization. However, it helps to build a control chart which beats Gan’s best combination as will be demonstrated in Section 4. Then c∗µ = 0.345 477 and c∗σ = 0.477 977 are used, which yields an incontrol ARL of 252.3 of the combined scheme and equal ARLs of the single charts. A Monte Carlo study with 109 replicates validates the above joint ARL value by resulting in 252.307 with standard error 0.0078. In Figure 1 the approximated ARL versus matrix dimension N (each method relies on matrices) are plotted. Note that the truncation point J that is needed for approaches 1 to 4 is always chosen in the same way. The distance between the bounds mentioned in the beginning of the section, ARL± J , should be smaller than 10−8 . The matrix dimension N is only related to the quality of the survival function approximation. 7 Figure 1. Precision of different ARL computation methods for the in¯ 2 EWMA control chart monitoring the mean (2-sided) control ARL of a X-S and variance (upper) of normally distributed data, the true value is 252.3 and the smoothing values are λµ = 0.134 and λσ = 0.1; S – Simpson rule, M 1 – Markov chain (midpoint rule), M 2 – Markov chain (Sylvester matrix equation), C – Collocation. The Gauss-Legendre quadrature based results are not drawn in Figure 1, because they oscillate more than all the others (see Table 1 for some numerical results). At first sight of Figure 1, the collocation method exhibits the best performance. For dimension N = 23, collocation already ensures the first 6 digits after the decimal point. No other method in the study attains this accuracy with N below 300. Even if we regard the higher complexity of the collocation approach, which leads to the highest computing times for fixed N among the candidates, collocation is the clear favorite. See Table 1 for the corresponding computing times. The second and third best ones are the two Markov chain approaches, followed by Simpson and Gauss-Legendre quadrature based ones. Table 1. Resulting ARL approximations and CPU times (measured in hundredth seconds on an Athlon XP 1.4 GHz) for selected matrix dimensions N and all methods under consideration; the true value is 252.2999. Method Gauss-Leg. Simpson M. chain 1 M. chain 2 Collocation 13 25 60.8717 1 5.2588 1 232.4026 <1 211.3234 <1 253.3603 2 90.9297 1 -1 1 245.2234 <1 239.9381 1 252.2999 8 matrix dimension N 51 101 143.4348 2 297.8329 2 250.5108 2 249.3160 5 252.2999 35 253.1860 5 249.0502 5 252.2235 5 251.9535 32 252.2999 140 201 301 252.1741 30 252.5606 30 252.3001 31 252.2515 286 252.2999 583 252.6392 65 252.3129 65 252.2729 68 252.2598 1221 252.2999 1323 Thus, if we are interested in getting a quick and nearly accurate result, 8 then we would take the Markov chain approximation M 1. If we prefer high accuracy, then collocation is the first choice. The numbers in Table 2 demonstrate how the collocation approach works for smaller λσ down to 0.001 and less subgroup sizes n. The parameter λµ remains unchanged because it is numerically less subtle. Table 2 gives the matrix dimensions Nσ (only the resolution of the S 2 related approximation, just Nσ , is increased; Nµ is fixed at 51) and the resulting final thresholds, that is, c∗µ and c∗σ . Fortunately, the matrix dimension Nσ does not increase Table 2. Resolution (matrix dimension) Nσ needed to ensure 6 digits accuracy for the in-control ARL (252.3). Additionally, both (finalized) critical values c∗µ and c∗σ (second and third entry) are given. n 5 4 3 2 0.1 0.05 λσ 0.01 23 0.345477 0.477977 23 0.386268 0.563641 17 0.446048 0.713918 23 0.546349 1.081116 31 0.345381 0.284547 31 0.386166 0.332911 21 0.445939 0.416409 31 0.546243 0.614829 60 0.345962 0.075633 62 0.386822 0.087563 37 0.446709 0.107662 61 0.547224 0.153289 0.005 0.001 83 0.347443 0.038398 85 0.388478 0.044359 50 0.448622 0.054313 83 0.549569 0.076655 167 0.356187 0.006213 174 0.398254 0.007149 107 0.459910 0.008701 176 0.563392 0.012100 too fast. Note that small λ’s such as 0.001 are not reasonable at all. Knoth (2006) provides a small study for one-sided S 2 EWMA charts that illustrates it. While the ARL for detecting a given scale change decreases, the in-control probability of an early alarm (right at the first observation) increases heavily. In Section 6 the collocation approach is described in more detail. In the next Section we employ this ARL calculation method to compare Gan’s (ln S 2 based) ARL results with the ARL values of the competing S 2 based simultaneous EWMA chart. 9 ¯ S 2 AND X-S ¯ 2 EWMA CHARTS 4. COMPARE X-ln Gan (1995) compared omnibus charts described in Domangue and Patch (1991) with two joint EWMA charts and one CUSUM combination in terms of their ARL. Both EWMA and CUSUM are built with ln S 2 . The EWMA charts work considerably well. Here, we want to add for both EWMA schemes the corresponding performance of the S 2 based charts. As mentioned in the previous Section, we take the same λµ = 0.134 like Gan, but set λσ = 0.1, which is sufficiently powerful – as we will see soon. The critical limits c∗µ and c∗σ are chosen to provide an in-control ARL 252.3 for the ¯ chart looks similar: combined scheme. Recall that Gan’s limit for the X c∗µ,Gan = 0.345 vs. c∗µ = 0.345477. These limits ensure also equal in-control ARLs for the single charts, namely 499.3. Note that our comparison is not really fair, because Gan’s EWMA sequence exhibits a lower reflection barσ σ + ln Si2 }. Then, Gan calculated = max{0, (1 − λσ )Zi−1,Gan rier, i. e. Zi,Gan σ the ARL for z0,Gan = 0 that corresponds to the worst case for detecting an increase in σ 2 (the smoothing value is λσ,Gan = 0.043). For the S 2 based chart, we calculate the ARL as usual for EWMA charts, that is, for z0 = σ02 = 1, which is not the lowest position of Ziσ . It is difficult to compare these charts in an appropriate manner (we have to switch to the steady-state ARL or we should introduce a reflection for the S 2 chart like in the comparison in Knoth 2005). In Table 3, however, we give ARL values of both (upper) EWMA charts. ¯ S 2 (EEU ), and of Table 3. Subset of ARLs from Gan (1995), that is, X-ln 2 ¯ X-S EWMA charts calculated by collocation. ∆ 0 0.20 0.40 1.00 σ/σ0 1.00 1.05 1.25 1.00 1.05 1.25 1.00 1.05 1.25 1.00 1.05 1.25 ¯ S 2 252.3 113.0 16.6 129.7 78.3 15.9 48.8 39.4 14.2 10.2 10.0 8.3 X-ln ¯ 2 252.3 101.2 13.9 129.3 72.6 13.4 48.6 38.1 12.3 10.1 9.9 7.7 X-S √ Note that the shift ∆ is measured in σ0 / n units (subgroup size n) like in Gan (1995). We see from Table 3 that the S 2 based version works slightly better. Remember that the comparison suffers from the same dilemma as many EWMA-CUSUM comparisons. We consider now a comparison for the double two-sided schemes. It would remain an unfair comparison if CUSUM would be one competitor. ¯ S 2 EWMA chart and our X-S ¯ 2 EWMA chart, Gan’s double two-sided X-ln 10 however, act similarly. According to Gan, the critical limits of his twosided ln S 2 were chosen to minimize the ARL for detecting an increase to σ = 1.25σ0 (now λσ,Gan = 0.106). His resulting critical limits are c∗µ,Gan = 0.345, c∗σ,lower,Gan = −0.867 and c∗σ,upper,Gan = 0.215. Here, we want to ¯ 2 chart, and with so-called compare this optimal chart with a similar X-S ARL-unbiased versions of both. The analysis of the former is based again on collocation methods and provide c∗µ = 0.345313, c∗σ,lower = −0.383153 and c∗σ,upper = 0.53 (the upper variance limit was fixed, the lower one and the mean limit are chosen to give the joint ARL 252.3 and equal ARL values of the mean and the variance chart). The term ARL-unbiased was defined in Pignatiello et al. (1995) and broadly applied for variance control charts in Acosta-Mej´ıa and Pignatiello (2000). Roughly speaking, the max of the ARL for fixed µ = µ0 = 0 and for varying σ should be attained at σ = σ0 = 1. While it is trivial for symmetric distributions (symmetric lower and upper control limits ensure that), it is more demanding to choose the usually non-symmetric limits to provide the max at the right position. Here, we try to solve the following task: 1. Joint ARL is again 252.3. 2. ARLs of the single charts are equal. 3. The slope (of the ARL function) in σ direction at σ = σ0 = 1 is 0. This is done numerically based on Gan’s methods and on collocation. The re¯ S 2 EWMA scheme are c∗ sulting critical limits of Gan’s X-ln µ,Gan = 0.345382, ∗ ∗ cσ,lower,Gan = −0.824585, and cσ,upper,Gan = 0.262703. The respective limits ¯ 2 EWMA chart are c∗ = 0.345271, c∗ of the X-S µ σ,lower = −0.363404, and ∗ cσ,upper = 0.582758. The variance limits are slightly increased compared to the previous designs. Thus, both schemes now detect decreases in σ faster, while the increase detection ability became worse. In Figure 2 we see the √ results for µ = µ0 + ∆/ n , ∆ ∈ {0, 0.2, 0.4, 1}. For the given domain of possible σ values, the S 2 based scheme is better than the ln S 2 one. Only for σ values smaller than 0.7 or larger than 1.3, and for µ = 1 and σ < 1 the ln S 2 based version provides a better ARL performance. The latter demonstrates the advantage of the more symmetric behavior of the ln S 2 version. The S 2 version, however, becomes faster and faster, when the magnitude of the mean shift and the variance increase in the same time. 11 5. CONCLUSIONS The main result of the current paper is that we are able to get accurate ARL ¯ 2 EWMA control charts. To do this, one should use colloresults for X-S cation for the S 2 part. Standard methods like the Markov chain approach provide quick and nearly accurate results, but do not attain high accuracy. Moreover, as already seen in Knoth (2005) and several papers mentioned therein S 2 based schemes perform better than ln S 2 ones in terms of their ARL. However, the current paper does not provide a complete study. A further paper might fill this gap. For truly two-sided variance EWMA charts one has to look for so-called ARL-unbiased designs. With recent computer technology (PCs, not clusters or bigger boxes, which are even faster), this is done with CPU times of some seconds only. To get rid of large delays in detecting mean changes in the presence of simultaneous variance decreases, it is enough to take a slightly non-symmetric design (hence, the scheme becomes “ARL-biased”) as Gan (1995) already did. 6. APPENDIX Here, some more details of the collocation method as a plugin for calculating the iterations of P (Lσ > j) follow. Note that for the whole calculation process we derive equations for an approximation of the run length survival function and not for the true function itself, that is, all terms like P (L > j) refer now to the numerical approximation. ¯ chart the Gauss-Legendre quadrature is employed, Recall that for the X which is here the most powerful one. Thus, take N Gauss-Legendre roots zs and weights ws on the integration interval [−c∗µ , c∗µ ], so that P (Lµ > j)(zr ) = N X ws P (Lµ > j − 1)(zs ) fµ (zr , zs ) , r = 1, 2, . . . , N s=1 provides us with a numerical recipe for the iteration sequence P (Lµ > j). Please do not confuse z0µ (or z0σ ) from Section 3, where the 0 stands for in control, with zs . Here, s points to sth quadrature node. In Section 3 the same was applied for P (Lσ > j) besides the Simpson and midpoint rules as competing quadrature methods. Now, the collocation method should be presented. Collocation means that the solution is built as linear combination of certain base functions 12 {Ts (·)}. Thus, set for each j P (Lσ > j)(z) = N X gjs Ts (z) s=1 via N X gjs Ts (zr ) = s=1 N X ∗ 1+c Z σ gj−1,s s=1 Ts (z)fσ (zr , z) dz , r = 1, 2, . . . , N 0 on a suitably chosen grid z1 < z2 < . . . < zN and an easily derived starting set {g1s } we obtain the wanted iteration sequence for approximating the run length survival function. We calculate the new values {gjs } step by step while solving the above equation systems. If we take step functions as base, then we arrive again at the Markov chain approach. Usual bases are monomials like 1, z, z 2 , . . . , z N −1 , Lagrange or Chebyshev polynomials (some adaption for usage on [0, 1 + c∗σ ] is needed) Ts (z) = cos s arccos(z) , s = 0, 1, . . . , N − 1 , z ∈ [−1, 1] , which ensure more stable numerical quadratures than monomials or Lagrange polynomials. It could be worthwile to compare monomials and Chebyshev polynomials in terms of the resulting ARL computing time. For monomials it could be easier to establish faster iterations. ¯ and for S 2 we are able to approximate the survival function Now, for X µ/σ P (Lµ/σ > j) for arbitrary z and not only at the nodes zr . Recall that the grids used for the single charts differ from each other. Thus, zs stands for the respective grid. In terms of vector arithmetics the methods look like: P~j = MP~j−1 , µ 0 ) , P~j = P (Lµ > j)(z1µ ), . . . , P (Lµ > j)(zN M = Mrs , Mrs = ws fµ (zr , zs ) , for the simple mean part and N ~gj = O~gj−1 , ~gj = gj1 , . . . , gjN , N = Nrs , Nrs = Ts (zrσ ) , ∗ 1+c Z σ O = Ors , Ors = Ts (z σ )fσ (zrσ , z σ ) dz σ 0 13 for the more subtle S 2 chart. Here, we recognize the source of the higher computing times for fixed N compared to the competing methods. Fortunately, the matrices N and O do not depend on j so that the solution of the linear equation system for each j could be accelerated. The entries of O are calculated numerically, where only small numbers of quadrature points are needed (do not confuse these quadratures with the upper ones) for high accuracy. Note that for this paper Chebyshev polynomials are used (just in case when for very small λ large values of N could be necessary). For the monomials base perhaps, faster solution is possible. For the two-sided variance chart the collocation approach becomes even more difficult to describe. Instead of bases which contain smooth, nonconstant functions over the whole interval [1 + c∗σ,lower , 1 + c∗σ,upper ], we use now piecewise defined functions, which vanish outside a small supporting interval. For details about this we refer to Knoth (2005). The reason behind this detour is that the piecewise approach is considerably more precise than the full approach and does not need more computing time for the same N . Eventually, the numerical approach for the ARL-unbiased design will be sketched. As mentioned in Section 4, three conditions have to be fulfilled and three critical values are unknown. The iteration starts with the upper scheme that yields the target joint in-control ARL and equal ARLs of the single charts. Then, a slightly increased upper variance limit is fixed. The remaining limits are calculated to ensure the previous mentioned ARL design. Finally, by means of the secant rule this upper variance limit is changed as long as (Lµ0 ,σ0 −ε − Lµ0 ,σ0 +ε )/(2ε) (this secant should mimic the slope at (µ0 , σ0 ) in σ-direction) is larger than 10−6 . Thereby, ε is set to 10−4 . After updating the upper variance limit, the lower one and the mean limit are again derived to provide the target joint ARL and equal ARL values of the separate charts. Figure 2 demonstrates that the iteration provides reasonable results. References Acosta-Mej´ıa, C. A. and Pignatiello, J. J., Jr. (2000). Monitoring Process Dispersion Dithout Subgrouping, Journal of Quality Technology 32: 89– 102. Brook, D. and Evans, D. A. (1972). An Approach to the Probability Distribution of CUSUM Run Length, Biometrika 59: 539–549. 14 Domangue, R. and Patch, S. (1991). Some Omnibus Exponentially Weighted Moving Average Statistical Process Monitoring Schemes, Technometrics 33: 299–313. Gan, F. F. (1995). Joint Monitoring of Process Mean and Variance Using Exponentially Weighted Moving Average Control Charts, Technometrics 37: 446–453. Knoth, S. (1998). Exact Average Run Lengths of CUSUM Schemes for Erlang Distributions, Sequential Analysis 17: 173–184. Knoth, S. (2005). Accurate ARL Computation for EWMA-S 2 Control Charts, Statistics and Computing 15: 341–352. Knoth, S. (2006). The Art of Evaluating Monitoring Schemes – How to Measure the Performance of Control Charts?, in Frontiers in Statistical Quality Control 8, H.-J. Lenz and P.-T. Wilrich, eds., pp. 74-99, Heidelberg: Springer. Knoth, S. and Schmid, W. (2002). Monitoring the Mean and the Variance of a Stationary Process, Statistica Neerlandica 56: 77–100. Madsen, R. W. and Conn, P. S. (1973). Ergodic Behavior for Nonnegative Kernels, Annals of Probability 1: 995–1013. Morais, M. C. and Pacheco, A. (2000). On the Performance of Combined EWMA Schemes for µ and σ: A Markovian Approach, Communications in Statistics - Simulation & Computation 29: 153–174. Morais, M. C. and Pacheco, A. (2006). Misleading Signals in Joint Schemes for µ and σ, in Frontiers in Statistical Quality Control 8, H.-J. Lenz and P.-T. Wilrich, eds., pp. 100-123, Heidelberg: Springer. Pignatiello, J. J., Jr., Acosta-Mej´ıa, C. A., and Rao, B. V. (1995). The Performance of Control Charts for Monitoring Process Dispersion, 4th Industrial Engineering Research Conference, pp. 320–328. Reynolds, M. R., Jr. and Stoumbos, Z. G. (2001a). Individuals Control Schemes for Monitoring the Mean and Variance of Processes Subject to Drifts, Stochastic Analysis and Applications 19: 863–892. Reynolds, M. R., Jr. and Stoumbos, Z. G. (2001b). Monitoring the Process Mean and Variance Using Individual Observations and Variable Sampling Intervals, Journal of Quality Technology 33: 181–205. 15 Reynolds, M. R., Jr. and Stoumbos, Z. G. (2004). Control Charts and the Efficient Allocation of Sampling Resources, Technometrics 46: 200–214. Waldmann, K.-H. (1986). Bounds for the Distribution of the Run Length of Geometric Moving Average Charts, Journal of Royal Statistical Society, Series C 35: 151–158. 16 Figure 2. ARL function of double two-sided EWMA charts (Gan’s EE ¯ 2 -EWMA), mean is fixed at µ = µ0 + ∆/√n , ∆ ∈ {0, 0.2, 0.4, 1}, and X-S in-control ARL 252.3. 17








© Copyright 2026