
Use of Silicone Materials to Simulate Tissue Biomechanics as
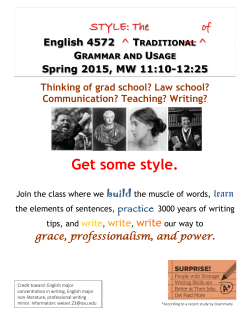
ORIGINAL INVESTIGATION Use of Silicone Materials to Simulate Tissue Biomechanics as Related to Deep Tissue Injury Jessica L. Sparks, PhD; Nicholas A. Vavalle, MS; Krysten E. Kasting; Benjamin Long, MS; Martin L. Tanaka, PhD; Phillip A. Sanger, PhD; Karen Schnell, MSN; and Teresa A. Conner-Kerr, PhD ABSTRACT CONCLUSION: Indentation tests and the prototype patient simulator trial demonstrated similar trends with high pressures closest to the bony prominence with decreasing magnitude toward the interfacial surface. Qualitatively, silicone mimicked the phenomenon observed in muscle of nonuniform stress under concentrated loading. Although shear moduli were within biological ranges, stress and stiffness values exceeded those of porcine muscle. This research represents a first step toward development of a preclinical model simulating the biomechanical conditions of stress and strain in deep muscle, since local biomechanical factors are acknowledged to play a role in DTI initiation. Future research is needed to refine the capacity of preclinical models to simulate biomechanical parameters in successive tissue layers of muscle, fat, dermis, and epidermis typically intervening between bone and support surfaces, for body regions at risk for DTI. KEYWORDS: deep tissue injury, soft tissue biomechanics, pressure ulcer, patient simulator OBJECTIVE: Deep tissue injury (DTI) is caused by prolonged mechanical loading that disrupts blood flow and metabolic clearance. A patient simulator that mimics the biomechanical aspects of DTI initiation, stress and strain in deep muscle tissue, would be potentially useful as a training tool for pressure-relief techniques and testing platform for pressure-mitigating products. As a step toward this goal, this study evaluates the ability of silicone materials to mimic the distribution of stress in muscle tissue under concentrated loading. METHODS: To quantify the mechanical properties of candidate silicone materials, unconfined compression experiments were conducted on 3 silicone formulations (Ecoflex 0030, Ecoflex 0010, and Dragon Skin; Smooth-On, Inc, Easton, Pennsylvania). Results were fit to an Ogden hyperelastic material model, and the resulting shear moduli (G) were compared with published values for biological tissues. Indentation tests were then conducted on Ecoflex 0030 and porcine muscle to investigate silicone’s ability to mimic the nonuniform stress distribution muscle demonstrates under concentrated loading. Finite element models were created to quantify stresses throughout tissue depth. Finally, a preliminary patient simulator prototype was constructed, and both deep and superficial ‘‘tissue’’ pressures were recorded to examine stress distribution. RESULTS: Indentation tests showed similar stress distribution trends in muscle and Ecoflex 0030, but stress magnitudes were higher in Ecoflex 0030 than in porcine muscle. All 3 silicone formulations demonstrated shear moduli within the range of published values for biological tissue. For the experimental conditions reported in this work, Ecoflex 0030 exhibited greater stiffness than porcine muscle. ADV SKIN WOUND CARE 2015;28:59Y68 INTRODUCTION Pressure ulcers (PrUs) are a common condition in both persons who use wheelchairs and those unable to sit out of bed. They cost the United States alone more than $1.2 billion1 and affect 10% of all hospitalized patients.2 Pressure ulcers can be broadly classified as 1 of 2 types: superficial or deep.3 Superficial ulcers affect skin layers near the epidermis and are formed as a result of damaging frictional and shear forces in the presence of moisture and heat.3,4 Deep PrUs are the focus of this study. These ulcers develop in deep muscle tissue next to bony prominences such as the sacrum, Jessica L. Sparks, PhD, is an Associate Professor of Chemical, Paper, and Biomedical Engineering, Miami University, Oxford, Ohio. Nicholas A. Vavalle, MS, is a doctoral candidate in biomedical engineering, Wake Forest University, Winston-Salem, North Carolina. Krysten E. Kasting is a bioengineering undergraduate student, Miami University, Oxford, Ohio. Benjamin Long, MS, is an Instructor of Physical Therapy, Winston-Salem State University, Winston-Salem, North Carolina. Martin L. Tanaka, PhD, is an Assistant Professor of Engineering and Technology, Western Carolina University, Cullowhee, North Carolina. Phillip A. Sanger, PhD, is a Professor of Electrical and Computer Engineering, Purdue University, West Lafayette, Indiana. Karen Schnell, MSN, owns Blue Sky Health Concepts Consulting, Mebane, North Carolina. Teresa A. Conner-Kerr, PhD, is Dean of the College of Health Sciences, University of North Georgia, Dahlonega, Georgia. Dr Sparks and Mr Vavalle have disclosed that Wake Forest University is a past recipient of grant funding from the US Department of Education (awarded to T.A.C.-K.). Mr Long has disclosed that Winston-Salem State University is a past recipient of grant funding from the US Department of Education (awarded to T.A.C.-K.). Dr Sanger has disclosed that his institution is a past recipient of grant funding from the Golden Leaf Foundation. Ms Schnell has disclosed that she has previously received an honorarium from Winston-Salem State University, and is a past recipient of payment for writing or reviewing a manuscript from Winston-Salem State University. Dr Kerr has disclosed that Winston-Salem State University is a past recipient of a Title III US Department of Education grant. Ms Kasting and Dr Tanaka have disclosed that they have no financial relationships related to this article. Acknowledgments: The authors acknowledge Nick Ashworth, Isaac Crisp, Andrew York, and Erik Ellington for their assistance with data acquisition and graphical user interface development. The authors also thank Kristen Pone, Christen Isley, and Peggy Furr, for their assistance with fiberglass casting and material acquisition. Funding for this research was provided by the US Department of Education (grant P031B085015-9 to T.A.C.-K.) and the Goldenleaf Fund (to P.A.S.). Submitted July 5, 2013; accepted in revised form April 2, 2014. WWW.WOUNDCAREJOURNAL.COM 59 ADVANCES IN SKIN & WOUND CARE & FEBRUARY 2015 Copyright © 2015 Wolters Kluwer Health | Lippincott Williams & Wilkins. Unauthorized reproduction of this article is prohibited. ORIGINAL INVESTIGATION ischial tuberosity, or greater trochanter of the femur.3,5,6 Deep PrUs are caused by prolonged mechanical loading (compression) that interferes with blood flow and clearance of metabolic byproducts. As the deep muscle tissue undergoes necrosis, it becomes stiffer, projecting the mechanical stresses to more superficial tissues, which then bear the mechanical load.7,8 Since the injury develops under intact skin, the damage is difficult to detect at early stages. These potentially life-threatening injuries have been termed deep tissue injury (DTI).9 Biomechanical research6,10 has demonstrated that concentrated stresses in deep tissues near bony prominences cannot be readily predicted from surface pressure maps, which are currently a key technology for pressure-related risk assessment.3,11 Since DTIs develop deep in the subdermal tissue layer, the use of interfacial pressure mapping to evaluate clinical strategies for DTI prevention, such as cushions, mattresses, and repositioning techniques, can be misleading.6,12,13 If clinicians could more accurately evaluate the stresses that develop within deep muscle tissue, they could provide better information to healthcare providers regarding the ability of repositioning protocols to lessen the local mechanical load at deep, high-risk sites. In addition, clinicians could generate better test protocols for evaluating the effectiveness of pressure-relieving products, such as mattress and cushions, for DTI prevention. These goals can potentially be achieved in the long term by developing a novel patient simulator with biomechanical properties similar to actual human tissues, including compressive properties of muscle tissue and stresses near the bone-muscle interface. Although a variety of buttock phantoms have been developed for wheelchair-cushion testing, few of these32,33 generate information regarding the stress or deformation of deeper material adjacent to a simulated ‘‘bone.’’ Those that have been reported were made of polyvinyl chloride cast around a wooden core and thus lacked realistic mechanical properties of biological tissues.32,33 Because the composition and microstructure of biological tissue are enormously complex, the construction of a suitably accurate simulator for DTI prevention is a significant challenge. The longterm goal of this work is the development of a simulator that mimics the biomechanical conditions of stress and strain in deep muscle, since local biomechanical factors are acknowledged to play a role in DTI initiation.6Y8,34,35 As a step toward this goal, this study evaluates the ability of soft silicone materials to mimic specific features of the compressive mechanical behavior of biological muscle tissue. In particular, this study will focus on (1) shear modulus, a mechanical property indicative of how stiff a material feels to the touch, and (2) the ability of a material to mimic the nonuniform stress distribution in tissues subjected to indentationtype loading, such as that which occurs in muscle compressed by a bony prominence. These material features are expected to be among the relevant features necessary for reproducing, in a synthetic ADVANCES IN SKIN & WOUND CARE & VOL. 28 NO. 2 environment, the biomechanical conditions associated with DTI initiation. Silicone rubber was selected as a good candidate material for this initial study because of its ability to retain its shape and its resistance to degradation and because it can be readily obtained in different degrees of stiffness to mimic mechanical properties of biological tissue. The objectives of the study are as follows: Measure the mechanical properties for 3 formulations of silicone using uniaxial unconfined compression experiments, and compare resulting shear moduli to published values for biological tissues (muscle, fat, and skin) tested in compression. Using an indenter with realistic bony geometry, conduct indentation experiments in both silicone and muscle tissue specimens and examine how pressure varies as a function of distance from the bony prominence (indenter tip). Demonstrate proof of principle that a prototype patient simulator can be used to obtain internal pressure measurements at multiple tissue depths near a specified bony prominence. METHODS Biomechanical Testing Specimen Preparation. Three formulations of silicone rubber were obtained from Smooth-On, Inc (Easton, Pennsylvania): Dragon Skin, Ecoflex 0010, and Ecoflex 0030. Cylindrical samples (average diameter, 35.8 mm; average height, 24.5 mm) were prepared according to the manufacturer’s specifications for uniaxial compression tests by mixing the appropriate 2-part liquid forms of each formulation together and pouring the mixture into a mold. They were then allowed to cure for the recommended amount of time (75 minutes for Dragon Skin, 4 hours for each Ecoflex). During the curing phase, a level was used to verify that the top and bottom of each sample were parallel, in order to avoid asymmetric loading during the uniaxial compression test. For this test series, a total of 18 specimens were produced, 6 of each type of rubber. Each specimen was measured with calipers after demolding to ensure consistent dimensions. An additional set of 3 Ecoflex 0030 samples (average diameter, 59.3 mm; average height, 26 mm) were prepared for indentation testing using the same preparation methods. Samples of porcine muscle obtained from the local grocer were also prepared to undergo similar testing. Six porcine muscle samples were prepared as cylinders (average diameter, 60.2 mm; average height, 28.2 mm). The specimens were presliced to uniform thickness, and samples were cut using a circular guide and surgical blade. Uniaxial Unconfined Compression. Uniaxial unconfined compression testing is a standardized method for evaluating the mechanical properties of compliant materials, such as polymers or soft tissues.14 Uniaxial compression tests were conducted for each silicone specimen using an Electroforce LM1 Test Bench mechanical 60 WWW.WOUNDCAREJOURNAL.COM Copyright © 2015 Wolters Kluwer Health | Lippincott Williams & Wilkins. Unauthorized reproduction of this article is prohibited. ORIGINAL INVESTIGATION testing system (Bose Corporation, Eden Prairie, Minnesota) with a 250-N capacity load cell. The uniaxial compression test consisted of loading the specimen at a constant rate (1.0% strain per second) until the selected maximum strain value (25% compression) was reached. The strain rate and maximum strain values were chosen to reflect test conditions that have been previously reported for biological tissues tested in compression.15,16 Force and displacement data were recorded in all tests. Force data were converted to engineering stress by dividing by the initial cross-sectional area of the specimen. Displacement data were used to calculate engineering strain as change in length divided by original length. The experimental setup was identical for all 3 silicone formulations. Petroleum jelly was applied to the top and bottom of each sample before testing to reduce the effects of friction. Indentation Testing. For the indentation experiments, a human sacrum model (3B Scientific, Tucker, Georgia) was mounted to the Bose Electroforce LM1 Test Bench mechanical testing system using a custom-mounting fixture (Figure 1). The spinous tubercle of the bone model was used to indent the specimens. Prior to indentation, 2 Millar Mikro-Tip Pressure Catheters (SPR-524; ADInstruments, Colorado Springs, Colorado) were inserted into the specimens at 2 or 5 mm from the top and bottom surfaces of the specimen, for porcine muscle and Ecoflex 0030 samples, respectively. Pressure sensor locations were termed deep (near the bony prominence) and superficial (distant from the bony prominence) (Figure 1). A needle was used to create guide holes for sensor insertion, and the guide holes were prefilled with petroleum jelly to create a smooth coupling between the specimens and miniature pressure sensors. The indentation test consisted of loading the specimen at a constant rate of 0.5 mm/s for 8 seconds. Force and pressure (at both deep and superficial depths) data were recorded in all tests. Table 1. LITERATURE RANGES FOR SHEAR MODULI OF BIOLOGICAL TISSUES: ALL DATA REPORTED FROM COMPRESSION TESTING G (kPa) Biological Tissue Muscle Longitudinal Transverse Active Relaxed Skin Fat 51Y10523Y25 11Y5423,25 17.1Y30.522,25 4.6Y23.86,15,16,22 2.8Y31.96,20,26 1.9Y31.96,20,26 Patient Simulator Prototype. Based on the results of the material characterization experiments (Tables 1 and 2), Dragon Skin was used as muscle, Ecoflex 0010 as fat, and Ecoflex 0030 as skin in the initial simulator prototype. The prototype design was based on approximate human anatomical structure of the pelvis and upper thigh (Figure 2). The external geometry of the simulator was formed using a fiberglass cast from waist to midthigh. The inside of the fiberglass mold was coated with a thin layer of plaster to allow for easy removal of the silicone after molding. A thin layer of the skin simulant material was ‘‘painted’’ on the plaster and ultimately formed the outer surface of the simulator prototype. Simulated muscles were created by pouring muscle simulant into separate molds that were previously constructed to mimic the approximate shape of the major muscles of the pelvis and hip region. The muscles were affixed to the bony pelvis (Human Skeleton Model; 3B Scientific) in the corresponding anatomical locations. The bony pelvis with attached muscles was then suspended inside the fiberglass mold in the appropriate anatomical orientation. Simulated fat material (in liquid form) was then poured into the mold, to fill the spaces between the skin layer and the muscles. The fat material was allowed to solidify. The completed simulator prototype, shown in Figure 2, was designed to determine whether it is feasible to produce and detect differences in deep internal pressures (near a bony prominence) Figure 1. INDENTATION TEST SETUP FOR PORCINE MUSCLE WITH CUSTOM-MOUNTED 3B SCIENTIFIC SACRUM BONE INDENTER Table 2. BEST-FIT HYPERELASTIC MATERIAL CONSTANTS FOR SILICONE RUBBER FORMULATIONS Ogden Model Terms Silicone Type Shear Modulus G (kPa) Strain Hardening Exponent > Poisson Ratio M Dragon Skin Ecoflex 0010 Ecoflex 0030 75.449 12.605 22.081 5.836 4.32 0.825 0.4999 0.4999 0.4999 Load cell and both deep and superficial Millar Mikro-Tip Pressure Catheters are labeled. WWW.WOUNDCAREJOURNAL.COM 61 ADVANCES IN SKIN & WOUND CARE & FEBRUARY 2015 Copyright © 2015 Wolters Kluwer Health | Lippincott Williams & Wilkins. Unauthorized reproduction of this article is prohibited. ORIGINAL INVESTIGATION Figure 2. PRELIMINARY SIMULATOR PROTOTYPE A, Simulator prototype instrumented with pressure transducers at both deep and superficial locations over the sacrum. B, Computed tomography scan of prototype showing skeletal anatomy. C, Simulator control software and user interface. insertion technique described above. One pressure sensor was inserted in deep tissue adjacent to the spinous tubercle of the sacrum. The second sensor was also inserted over the spinous tubercle but in more superficial tissue just beneath the skin. Manual pressure was then applied with an open palm over the instrumented region, and pressures recorded from both sensors. and more superficial pressures (closer to the skin surface) in simulated soft tissues. Internal pressure data can be transferred from the simulator to the computer, exhibited on screen for immediate feedback, and stored for future analysis (Figure 2C). In a preliminary trial, the simulator was instrumented with 2 Millar Mikro-Tip Pressure Catheters (Millar, Inc, Houston, Texas) using the needle-guided Figure 3. ECOFLEX 0030 FINITE ELEMENT MODEL AT MAXIMUM INDENTATION A, Color mapping shows the normal stress distribution through the sample. B, Pressure related to distance from the indenter along line LS of the model. ADVANCES IN SKIN & WOUND CARE & VOL. 28 NO. 2 62 WWW.WOUNDCAREJOURNAL.COM Copyright © 2015 Wolters Kluwer Health | Lippincott Williams & Wilkins. Unauthorized reproduction of this article is prohibited. ORIGINAL INVESTIGATION Figure 4. PORCINE MUSCLE FINITE ELEMENT MODEL AT MAXIMUM INDENTATION A, Color mapping shows the normal stress distribution through the sample. B, Pressure related to distance from the indenter along the line LM of the model. Finite Element Modeling Statistical Analysis Computational finite element (FE) simulations were developed to create virtual (in silico) models of both types of mechanical tests: uniaxial unconfined compression and indentation. Models of uniaxial unconfined compression were used to determine the mechanical properties (Table 2 and Appendix) for each silicone formulation, by fitting hyperelastic Ogden model parameters to the average experimental stress-strain results for each silicone formulation. The calculated silicone mechanical properties were then implemented in separate FE simulations of the silicone indentation experiments. Analogous simulations of the porcine muscle indentation experiments were also created, using previously published and validated mechanical property values for muscle.17 The computer simulations of the indentation experiments were used to quantify the expected stress everywhere in the specimen, from immediately adjacent to the spinous tubercle indenter to the most distant regions from the indenter tip. The models were also used to examine how the stresses in the specimen varied with time, from initial indenter contact until peak indentation was achieved. To validate these model-predicted stress distributions, model output was compared directly against the measured ‘‘deep’’ and ‘‘superficial’’ pressure values, which were recorded at known depths in the sample throughout the indentation (Figures 3 and 4). Results of these comparisons were used to verify the accuracy of the models. Details of the FE model development are provided in the Appendix. To assess the accuracy of the mechanical property values implemented in the FE simulations for each synthetic tissue analog, linear regression analyses of model output versus experimental values were conducted for each simulation.18 A slope value near unity indicated a one-to-one relationship between experiment and model, and an R2 value near unity indicated a high goodness of fit. WWW.WOUNDCAREJOURNAL.COM RESULTS FE Model Parameters Best-fit material constants for all silicone rubber formulations are given in Table 2. Material constants for muscle17 are given in Table 3. Experimental Results and FE Model Validation Uniaxial Unconfined Compression. The measured peak stresses for Dragon Skin, Ecoflex 0010, and Ecoflex 0030 were 73.0 T 5.2, 12.1 T 0.75, and 24.0 T 1.7 kPa, respectively (mean T 1 SD). Stress versus strain results are illustrated in Figure 5, showing experimental data compared with best-fit FE model results for all silicone formulations. Linear regression (models vs experiments) of the ramp phase of compression showed high goodness of fit (R2 = 0.999), with slope values at or near unity (slope = 0.99Y1.00, P G .05). These results indicate a good fit of the models to the experimental data, giving confidence in the accuracy of the material property values (Table 2) implemented in the models. 63 ADVANCES IN SKIN & WOUND CARE & FEBRUARY 2015 Copyright © 2015 Wolters Kluwer Health | Lippincott Williams & Wilkins. Unauthorized reproduction of this article is prohibited. ORIGINAL INVESTIGATION 4A for Ecoflex 0030 and for porcine muscle, respectively. Model results are presented as normal compressive stress (S22) in the direction of loading. Stresses were then converted to units of millimeters of mercury to facilitate comparison against pressures measured experimentally at 2 locations per specimen: deep (near the indenter) and superficial (opposite the indenter). Similar stress distribution patterns can be seen in the Ecoflex 0030 and porcine muscle (Figures 3B and 4B) with highest stresses located adjacent to the bony prominence and with a lessening degree farther from the prominence. However, the Ecoflex 0030 material showed much greater stress magnitudes compared with muscle tissue. Experimental data showed good agreement with these trends. Ecoflex 0030 had an average measured peak deep pressure (near the indenter) of 142.5 mm Hg and an average measured peak superficial pressure (opposite the indenter) of 18.0 mm Hg, whereas the porcine muscle demonstrated an average peak deep pressure of 20.0 mm Hg and average superficial peak pressure of 2.4 mm Hg. Figures 3 and 4 provide direct comparisons of the experimental pressures recorded at known locations in the sample at maximum indentation, with the FE model predictions of stress at these same locations. Results suggest that the virtual FE models of indentation provide a good representation of the stress distributions produced Table 3. HYPERELASTIC MATERIAL CONSTANTS FOR MUSCLE USED IN FE SIMULATIONS17 [-] kPa kPa-1 >1=0.1316402E+01 >2=0.1835933E+02 K1=1.02571 K2=0.145209 E-04 D1=0.194987E-01 D2=0.166315 Note: For this material, D1 = 0.194987E-01 kPa-1 is equivalent to Poisson’s ratio M = .495. Comparison with Biological Tissues. Table 2 shows a summary of the shear modulus values of the 3 silicone rubber formulations, which can be compared against a range of shear moduli for muscle, fat, and skin tissues found in the literature (Table 1). Biological tissue shear moduli were taken only from studies in which the tissues were tested in compression, because biomechanical property data can vary significantly depending on the test mode used. The shear moduli of all silicone materials evaluated in the present study fell within the range of reported values for shear moduli of muscle, fat, and skin, for biomechanical tests conducted in compression. Indentation Testing. The model-predicted stress distributions in the tissue, at maximum indentation, are shown in Figures 3A and Figure 5. RESULTS OF UNIAXIAL COMPRESSION TESTS ON SILICONE RUBBERS (DRAGON SKIN, ECOFLEX 0010, AND ECOFLEX 0030) COMPARED WITH FINITE ELEMENT SIMULATIONS ADVANCES IN SKIN & WOUND CARE & VOL. 28 NO. 2 64 WWW.WOUNDCAREJOURNAL.COM Copyright © 2015 Wolters Kluwer Health | Lippincott Williams & Wilkins. Unauthorized reproduction of this article is prohibited. ORIGINAL INVESTIGATION Figure 6. PRESSURES MEASURED IN EXPERIMENTS COMPARED AGAINST FINITE ELEMENT MODEL-PREDICTED PRESSURES, FOR SILICONE AND MUSCLE INDENTATION TESTS A, Ecoflex 0030 indentation test: deep and superficial pressures in relationship to time for both experimental and model data. B, Porcine muscle indentation test: deep and superficial pressures in relationship to time for both experimental and model data. by this form of indentation loading in the experimental specimens, for both Ecoflex 0030 and passive porcine muscle. The results described above emphasized pressure as a function of location within the specimen. The FE model results were also compared against experimental data to examine how pressure varied with time at a given location. These results are shown in Figure 6. As before, the results suggest good agreement between FE simulations and the experimental pressure-time history produced during the indentation tests at ‘‘deep’’ and ‘‘superficial’’ point locations in the specimen. The results also confirm the finding that indentation of Ecoflex 0030 generated higher pressure magnitudes than did similar indentation of passive porcine muscle. Linear regression (experiment vs model) of the indentation pressure-time histories showed a high goodness of fit (R2 = 0.99, P G .05) for both deep and superficial pressure in Ecoflex 0030. A slightly weaker but still significant fit of the porcine muscle model to the data (R2 = 0.849 and 0.92 for deep and superficial, respectively) was seen. Deep pressure showed a slope near unity for both porcine muscle (1.007) and Ecoflex 0030 (0.987). Superficial pressure data showed slightly more spread in slope values. For Ecoflex 0030, a slope of 0.777 was calculated. The slope value for superficial pressure in porcine muscle was elevated (2.29), indicating that the model underpredicted the experimental value (0.97 vs 2.42 mm Hg at maximum indentation). Patient Simulator. The preliminary trial of the simulator prototype revealed a stress distribution pattern similar to that observed in the indentation testing (Figure 7). When manual pressure was applied over the instrumented sacral region, it was observed that pressures in the deep tissue adjacent to the bony prominence were higher than those recorded in more superficial tissue near the skin surface. It is not WWW.WOUNDCAREJOURNAL.COM Figure 7. RESULTS OF PRELIMINARY EXPERIMENTATION WITH PATIENT SIMULATOR PROTOTYPE. PRESSURE IN RELATIONSHIP TO TIME FOR SENSORS LOCATED AT DEEP AND SUPERFICIAL LOCATIONS WITHIN THE PROTOTYPE 65 ADVANCES IN SKIN & WOUND CARE & FEBRUARY 2015 Copyright © 2015 Wolters Kluwer Health | Lippincott Williams & Wilkins. Unauthorized reproduction of this article is prohibited. ORIGINAL INVESTIGATION tissue near a selected bony prominence, the spinous tubercle of the sacrum. The simulator was instrumented to provide real-time feedback on local pressure conditions at different tissue depths. The indentation experiments showed that, while the stress distribution patterns in porcine muscle tissue paralleled those of the Ecoflex 0030 silicone, the stress magnitudes in silicone were substantially higher than those in muscle tissue. The clinical implications of this discrepancy remain to be examined. Limitations of the current simulator prototype also include the fact that the interfaces between the tissue layers (skin-fat, fat-muscle, muscle-bone interfaces) require further development to reflect anatomical structure and that the model ultimately must be validated against biologic tissue representing all tissue components covering a bony prominence. In the long term, a fully developed and validated simulator, which accurately mimics all the relevant biomechanical complexities of human anatomy, could be used as a research platform for testing the effects of pressure-mitigating products on deep-tissue stresses. It could also be used to educate healthcare professionals on proper positioning techniques for deep pressure relief in the lower body. According to the current National Pressure Ulcer Advisory Panel and European Pressure Ulcer Advisory Panel International Guidelines for the Prevention and Treatment of Pressure Ulcers,9 repositioning should be utilized for all at-risk individuals. The panels assigned the highest level of evidence (A) to this intervention. It is well known that biological tissues exhibit viscoelastic mechanical behaviors such as creep, the phenomenon of increasing deformation under constant load.14Y16,20,21 Although the use of a viscoelastic material as a tissue analog would better capture this biomechanical property of human tissues, it could also incur practical problems with the fabrication of a durable and reusable simulator. For instance, sustained loading could cause viscoelastic materials to deform over time, such that recovery periods may be needed between users to allow the material to return to its original dimensions. Because of these limitations, silicone-based materials were selected as the best tissue analogs for the present study, because they could mimic tissue stiffness without the complicating effects of time-dependent viscoelastic behavior. All 3 silicone formulations had shear moduli values that fell within the range of biological tissue, and Ecoflex 0030 and porcine muscle demonstrated similar nonuniform stress distribution patterns; however, Ecoflex 0030 showed much higher stress magnitudes than muscle under indentation loading. One of the factors that could contribute to this difference is the large range of values for biological soft tissue. Although the shear modulus of Ecoflex 0030 (22 kPa) fell within the range of passive muscle (Table 1), it was on the upper limits of this range. In contrast, the shear modulus of porcine muscle, derived from the FE simulation, was found to be on the low end of this range (~1 kPa). This difference in stiffness would account for the higher stress magnitudes produced in Ecoflex 0030 under indentation Figure 8. FINITE ELEMENT MODEL SHOWING MESH PRIOR TO INDENTATION TEST possible to make direct comparisons with the pressure magnitudes measured in the indentation experiments, because the depth of the manually applied load was not recorded, and the geometric configuration of the loading environment differed significantly from that of the simplified indentation experiments. However, this preliminary trial demonstrated qualitatively that silicone-based tissue analogs were able to mimic the basic trend of a stress concentration developing in the material in the region of a bony prominence, when subjected to compressive loading. DISCUSSION To address the increasing human and financial burden of DTIs, it is crucial to train healthcare workers with the best techniques available to prevent DTI development. It is also necessary to provide researchers with suitable platforms for testing pressure-mitigating products for DTI prevention. Particular attention must be paid to deep tissue stresses in high-risk areas, such as the skin and soft tissue over certain bony prominences associated with the pelvic girdle and lower extremity, because 95% of PrUs are known to occur on the lower half of the body.19 In this study, the authors characterized mechanical properties of soft tissue analogs capable of generating shear moduli and stress distribution trends similar to biological soft tissue. With these analogs, the authors developed a preliminary patient simulator prototype that could mimic the phenomenon of concentrated stress in deep ADVANCES IN SKIN & WOUND CARE & VOL. 28 NO. 2 66 WWW.WOUNDCAREJOURNAL.COM Copyright © 2015 Wolters Kluwer Health | Lippincott Williams & Wilkins. Unauthorized reproduction of this article is prohibited. ORIGINAL INVESTIGATION loading. Gefen et al8 have reported that muscle stiffness increases in vivo with the development of deep PrUs. It would be informative in future work to compare the stress distribution in silicone against that of muscle tissue affected by DTI. Biomechanical properties are largely dependent on test conditions. For example, muscle demonstrates shear modulus temperature dependence.23 In addition, examination of the shear moduli reported in Table 1 shows that passive muscle is much less stiff than active muscle. It has been shown previously that, in the human biceps brachii, there is a linear relationship between shear modulus and muscle load.22 This means that as the muscle activation increases, its shear modulus increases. This suggests that the Dragon Skin material, although high within the range of the reported shear modulus of relaxed muscle tissues, may be a reasonable analog to the compressive properties of active muscle or even muscle under pathogenesis.22Y25 Although it had a high shear modulus, it was chosen as the muscle simulant in the patient simulator prototype in order to account for the significant stiffening that occurs under compression in in vivo muscle tissue.8 Shear moduli of silicone rubbers and biological soft tissues were compared (Tables 1 and 2) because shear modulus gives a sense of the ‘‘feel’’ or stiffness of the material. However, in comparing the full stress-strain responses of the silicones with biological materials, there is no perfect match. For example, none of the silicone materials showed the same degree of strain hardening that was observed by Wu et al26 in their compression tests of skin and adipose tissue. Based on other studies,27,28 it is expected that the silicone rubbers would exhibit strain hardening at higher levels of strain, yet this still differs from the strain hardening observed at lower strain levels (0.3Y0.5) in biological tissues. Also significant to this comparison is variation in species and anatomic location from which the biological samples were taken, among the literature studies used for benchmarking. Tissue properties vary from one species to the next. Within a given species, material properties can differ from one location to another or with temperature for the same type of tissue.23 For instance, the fat that is found in the human foot has a much different composition than fat found in other parts of the body.29 This could explain discrepancies in strain hardening between the fat data of Wu et al26 and those of Miller-Young et al.29 In summary, the biomechanical behavior of human tissues is complex, and results vary widely among studies. Silicones were not able to mimic all the complex features of biological tissue biomechanics, because of their significantly different structure and composition. In the present study, it was found that the tested silicone formulations were able to mimic certain features of tissue biomechanics that are likely to be relevant for future simulator development, such as possessing shear moduli in the range of biological soft tissue and exhibiting similar stress distribution patterns when subjected to indentation loading. Much additional work is needed to examine WWW.WOUNDCAREJOURNAL.COM other biomechanical features, such as material density, appropriate interface properties between different material layers, the influence of fiber orientation on muscle mechanical properties, and the ability of the simulated soft tissues to deform and return to their initial configuration as joints are moved from one position to another. CONCLUSIONS This research represents a first step toward development of a preclinical model simulating the biomechanical conditions of stress and strain in deep muscle, because local biomechanical factors are acknowledged to play a role in DTI initiation.6Y8,34,35 Future research is needed to refine the capacity of preclinical models to simulate biomechanical parameters in successive tissue layers of muscle, fat, dermis, and epidermis typically intervening between bone and support surfaces, for body regions at risk for DTI. In this study, materials used to simulate soft tissues were evaluated to characterize their behavior and compare with biological soft tissues. Three formulations of silicone were found to have shear moduli within the range of values for soft tissues published in the literature. Pressure at various locations within the tissue was measured to show the nonuniform pressure gradient that develops within the tissue upon force application during indentation-type loading, similar to that which occurs in deep muscle tissue compressed against bony prominences. Using this knowledge, a preliminary patient simulator prototype was developed. Materials were selected to mimic the mechanical properties of muscle, fat, and skin. The skeleton, molded muscles, skin layer, and simulated fat were assembled, and miniature pressure transducers were used to record local pressures in deep tissue near the spinous tubercle of the sacrum and in superficial tissue, above the spinous tubercle just beneath the skin. A patient simulator that can mimic the biomechanical aspects of DTI initiation, namely, stress and strain distributions in soft tissues subjected to lifelike mechanical loading conditions, is needed in the wound care industry. This future work will include extensive further development and validation of the device design. Ultimately, future iterations of this device could be used to train healthcare professionals in best practices of lower body position for deep pressure relief, which could greatly reduce the number of patients suffering from DTI. The device would also be an innovative test platform for evaluating the efficacy of products designed to prevent PrUs, such as cushions, mattresses, and dressings. & REFERENCES 1. National Center for Injury Prevention and Control: CDC Injury Fact Book. Atlanta, GA: Centers for Disease Control and Prevention; 2002. 2. Whittington K, Patrick M, Roberts J. A national study of pressure ulcer prevalence and incidence in acute care hospitals. J Wound Ostomy Continence Nurs 2000;27:209-15. 3. Bouten CV, Oomens CW, Baaijens FP, Bader DL. The etiology of pressure ulcers: skin deep or muscle bound? Arch Phys Med Rehabil 2003;84:616-9. 67 ADVANCES IN SKIN & WOUND CARE & FEBRUARY 2015 Copyright © 2015 Wolters Kluwer Health | Lippincott Williams & Wilkins. Unauthorized reproduction of this article is prohibited. ORIGINAL INVESTIGATION 4. Vidal J, Sarrias M. An analysis of the diverse factors concerned with the development of pressure sores in spinal cord injured patients. Paraplegia 1991;29:261-7. 5. Gefen A. Bioengineering models of deep tissue injury. Adv Skin Wound Care 2008;21:30-6. 6. Linder-Ganz E, Shabshin N, Itzchak Y, Gefen A. Assessment of mechanical conditions in sub-dermal tissues during sitting: a combined experimental-MRI and finite element approach. J Biomech 2007;40:1443-54. 7. Linder-Ganz E, Gefen A. Mechanical compression-induced pressure sores in rat hindlimb: muscle stiffness, histology and computational methods. J Appl Physiol (1985) 2004;96: 2034-49. 8. Gefen A, Gefen N, Linder-Ganz E, Margulies SS. In vivo muscle stiffening under bone compression promotes deep pressure sores. J Biomech Eng 2005;127:512-24. 9. European Pressure Ulcer Advisory Panel and National Pressure Ulcer Advisory Panel. Prevention and treatment of pressure ulcers: quick reference guide. Washington, DC: National Pressure Ulcer Advisory Panel; 2009. 10. Lyder HC. Pressure ulcer prevention and management. JAMA 2003;289:223-6. 11. Garcia AD, Thomas DR. Assessment and management of chronic pressure ulcers in the elderly. Med Clin North Am 2006;90:925-44. 12. Allen V, Ryan DW, Murray A. Repeatability of subject/bed interface pressure measurements. J Biomed Eng 1993;15:329-32. 13. Sprigle S, Dunlop W, Press L. Reliability of bench tests of interface pressure. Assist Technol 2003;15:49-57. 14. Macosko CW. Rheology Principles, Measurements, and Applications. New York, NY: Wiley-VCH; 1994:5-136. 15. Bosboom E, Hessenlink MK, Oomens CW, Bouten CV, Drost MR, Baaijens FP. Passive transverse mechanical properties of skeletal muscle under in vivo compression. J Biomech 2001;34: 1365-8. 16. Van Loocke M, Lyons CG, Simms C. Viscoelastic properties of passive skeletal muscle in compression: stress-relaxation behaviour and constitutive modeling. J Biomech 2008;41:1555-66. 17. Then C, Menger J, Benderoth G, et al. A method for a mechanical characterisation of human gluteal tissue. Technol Health Care 2007;15:385-98. 18. Anderson AE, Ellis BJ, Weiss JA. Verification, validation and sensitivity studies in computational biomechanics. Comput Methods Biomech Biomed Engin 2007;10:171-84. 19. Dharmarajan T, Sugalino JT. Pressure ulcers: clinical features and management. Hosp Physician 2002;38(3):64-71. 20. Zahouani H, Pailler-Mattei C, Sohm B, Vargiolu R, Cenizo V, Debret R. Characterization of the mechanical properties of a dermal equivalent compared with human skin in vivo by indentation and static friction tests. Skin Res Technol 2009;15:68-76. 21. Ferry JD. Viscoelastic Properties of Polymers. 3rd ed. New York, NY: Wiley and Sons; 1980. 22. Dresner M, Rose GH, Rossman PJ, Muthupillai R, Manduca A, Ehman RL. Magnetic resonance elastography of skeletal muscle. J Magn Reson Imaging 2001;269-76. 23. Sapin-de Brosses E, Gennisson JL, Pernot M, Fink M, Tanter M. Temperature dependence of the shear modulus of soft tissues assessed by ultrasound. Phys Med Biol 2010;55: 1701-18. 24. Lacourpaille L, Hug F, Bouillard K, Hogrel JY, Nordez A. Supersonic shear imaging provides a reliable measurement of resting muscle shear elastic modulus. Physiol Meas 2012;33(3): N19-28. 25. Ringleb SI, Bensamoun SF, Chen Q, Manduca A, An KN, Ehman RL. Applications of magnetic resonance elastography to healthy and pathologic skeletal muscle. J Magn Reson Imaging 2007;25:301-9. 26. Wu JZ, Cutlip RG, Andrew ME, Dong RG. Simultaneous determination of the nonlinear-elastic properties of skin and subcutaneous tissue in unconfined compression tests. Skin Res Technol 2007;13:34-42. 27. Shergold OA, Fleck NA, Radford D. The uniaxial stress versus strain response of pig skin and silicone rubber at low and high strain rates. Int J Impact Eng 2006;32:1384-402. 28. Lee OS, Kim MS, Kim KJ, Hwang SW, Cho KS. Dynamic deformation behavior of rubber under high strain rate compressive loading. Int J Mod Phys B 2003;17:1415-20. 29. Miller-Young JE, Duncan NA, Baroud G. Material properties of the human calcaneal fat pad in compression: experiment and theory. J Biomech 2002;35:1523-31. 30. Abaqus: Abaqus User’s Manual (Version 6.10). Providence, RI: Dassault Systemes Simulia Corp; 2010. ADVANCES IN SKIN & WOUND CARE & VOL. 28 NO. 2 31. Boyce MC, Arruda EM. Constitutive models of rubber elasticity: a review. Rubber Chemistry and Technology 2000;73:504-23. 32. Candadai RS, Reddy NP. Stress distribution in a physical buttock model: effect of simulated bone geometry. J Biomech 1992;25:1403-11. 33. Reddy NP, Patel H, Cochran GV, Brunski JB. Model experiments to study the stress distributions in a seated buttock. J Biomech 1982;15:493-504. 34. Linder-Ganz E, Engelberg S, Scheinowitz M, Gefen A. Pressure-time cell death threshold for albino rat skeletal muscles as related to pressure sore biomechanics. J Biomech 2006;39:2725-32. 35. Bader D, Bouten C, Colin D, Oomens C, eds. Pressure Ulcer Research: Current and Future Perspectives. Berlin, Germany: Springer-Verlag; 2005. APPENDIX Finite element simulations were created using Abaqus software (v6.12-1; Simulia, Providence, Rhode Island). All experiments were modeled as axisymmetric, and elements of type CAX4R (4-node, bilinear, axisymmetric, quadrilateral with reduced integration) were used. A typical FE mesh is shown in Figure 8. For uniaxial compression test simulation, the bottom surface was constrained in the vertical direction, and the appropriate amount of strain was applied, at the experimental strain rate, for each silicone formulation model. For indentation testing, both the silicone and the porcine muscle samples were constrained along the bottom in the vertical direction and along the left edge in the horizontal direction. Each sample was loaded at a constant rate of 0.5 mm/s for 8 seconds. Silicone rubber formulations and muscle tissue17 were modeled as hyperelastic materials. The strain energy potential, U, was defined using the Ogden model30 (Equation 1): U¼ N X 2 i i 2i i i i ð1 þ 2 þ 3 3Þ þ N X 1 ðJ 1Þ2i D i i where i, i, N, and Di are material coefficients, j = Jj1/3 j for j = 1,2,3, J is the volume ratio, and j are the principal stretches. Of interest for this work, the shear modulus G can be calculated from the i coefficients as (Equation 2): G¼ N X i i where N = 1 for silicone and N = 2 for muscle.17 The shear modulus was used as one means to compare the mechanical behavior of the various tissue analogs to that of native biological tissues reported in the literature. Poisson ratio, , can be calculated from D1 and G as (Equation 3)17,30: 3 ð1 2Þ D1 ¼ G ð1 þ Þ For additional detail on hyperelasticity, a review is given by Boyce and Arruda.31 68 WWW.WOUNDCAREJOURNAL.COM Copyright © 2015 Wolters Kluwer Health | Lippincott Williams & Wilkins. Unauthorized reproduction of this article is prohibited.





© Copyright 2026