
- Real-Time Systems
Real-Time Systems – Basics
1.1 Definition
Real-Time Systems
Summer term 2015
▸
Examples for use of real-time systems:
▸
Different application domains
Mostly embedded systems
Real-Time Systems
1. Chapter
Basics
Prof. Matthias Werner
Operating Systems Group
▸
summer term 2015 ⋅ M. Werner
Real-Time Systems – Basics
1.1 Definition
2 / 30
osg.informatik.tu-chemnitz.de
Real-Time Systems – Basics
1.1 Definition
Example: Pacemaker
Example: BMW 7 Series
source: BMW Group Munich
source: WikiCommons
▸
▸
one processor
ca. 500 000 LoC
summer term 2015 ⋅ M. Werner
▸
▸
3 / 30
osg.informatik.tu-chemnitz.de
ca. 70 control units, in part with multiple processors
ca. 100 million LoC
summer term 2015 ⋅ M. Werner
4 / 30
osg.informatik.tu-chemnitz.de
Real-Time Systems – Basics
1.1 Definition
Real-Time Systems – Basics
1.1 Definition
Example: Boeing 777
What is Real Time / a Real-Time System?
▸
▸
There exist quit a lot, partly confusing beliefs, what are the properties of a
real-time system
Real-time systems have to...
▸
▸
▸
▸
▸
▸
be fast?
be predictable?
provide results in a timely manner?
be secure?
act error-free?
operate even in presence of a failure?
á Need for a definition
source: J.M. Dibbs / Air France
▸
▸
ca. 1200 processors
ca. 4 billion LoC
summer term 2015 ⋅ M. Werner
5 / 30
osg.informatik.tu-chemnitz.de
Real-Time Systems – Basics
1.1 Definition
summer term 2015 ⋅ M. Werner
6 / 30
osg.informatik.tu-chemnitz.de
Real-Time Systems – Basics
1.1 Definition
Definitions
Definitions (cont.)
DIN 44300: Real-Time Operation
Echtzeitbetrieb ist ein Betrieb eines Rechensystems, bei dem Programme zur Verarbeitung
anfallender Daten st¨andig betriebsbereit sind derart, dass die Verarbeitungsergebnisse innerhalb
einer vorgegebenen Zeitspanne verf¨ugbar sind.
Approx. translation:
Real-time operation of a computer system is an operation mode, where programs that process
data are always ready in the way, that allows to provide the results within a given period of time.
KOPETZ Real-time computer system
A real-time computer system ist a computer system, in which the correctness of the system
behavior depends not only on the logical results of the computation, but also on the
physical instant at which these results are produced.
KRISHNA & SHIN: Real-time system
Wikipedia: Real-Time Computing
[...] real-time computing (RTC), or reactive computing, is the study of hardware and software
systems that are subject to a “real-time constraint” – i.e., operational deadlines from event to
system response. Real-time programs must execute within strict constraints on response time.
summer term 2015 ⋅ M. Werner
7 / 30
osg.informatik.tu-chemnitz.de
Any system where a timely response by the computer to a external stimuli is vital is a real-time
system.
summer term 2015 ⋅ M. Werner
8 / 30
osg.informatik.tu-chemnitz.de
Real-Time Systems – Basics
1.1 Definition
Real-Time Systems – Basics
1.1 Definition
Socratic Dialogue∗
Socratic Dialogue
SOCRATES:
Does “deadline” mean that any task really has to be finished by that time?
SOCRATES:
What means “timely”?
Answer:
Answer:
Not necessarily.
It means that tasks in a real-time system have to obey a deadline.
Sometimes yes: If landing of an airplane is controlled by a computer, missing
a deadline may lead to a crash.
Sometimes no: In a video game, nothing (really) bad happens in this case.
∗ inspired by [KS97]
summer term 2015 ⋅ M. Werner
9 / 30
osg.informatik.tu-chemnitz.de
summer term 2015 ⋅ M. Werner
Real-Time Systems – Basics
1.1 Definition
9 / 30
osg.informatik.tu-chemnitz.de
Real-Time Systems – Basics
1.1 Definition
Socratic Dialogue
Socratic Dialogue
SOCRATES:
SOCRATES:
Does “deadline” mean that any task really has to be finished by that time?
What means “finished”? Is there an exact criterion when a task is finished?
Answer:
Answer:
Not necessarily.
Not necessarily.
Sometimes yes: In a nuclear reactor delayed reaction may lead to a disaster.
Sometimes yes: For example, transferring money from one account to
another may depend on calculating the sum of different accounts.
Sometimes no: Getting a single measurement to late may not be a problem if
the next measurement is on time.
Sometimes no: If an application calculates the value of π it may decide to
stop earlier and use a less accurate result.
summer term 2015 ⋅ M. Werner
9 / 30
osg.informatik.tu-chemnitz.de
summer term 2015 ⋅ M. Werner
9 / 30
osg.informatik.tu-chemnitz.de
Real-Time Systems – Basics
1.1 Definition
Real-Time Systems – Basics
1.1 Definition
Socratic Dialogue
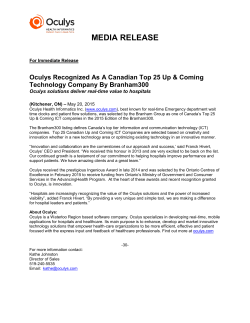
Different Time-Value Functions
SOCRATES:
value
value
deadline
Again to the deadline: What happens if a task does not obey its deadline? Will
it be terminated then?
deadline
Answer:
It differs.
time
time
If you are passenger of an airplane that crashes due to a missed deadline
than this is not relevant both for you and the computer.
On the other hand, for a video conference it may be useful not to skip a
delayed frame.
value
value
deadline
In general the value of a tasks result is decreasing for missed deadlines – in
some cases slowly, in other cases abrupt.
time
time
summer term 2015 ⋅ M. Werner
9 / 30
osg.informatik.tu-chemnitz.de
summer term 2015 ⋅ M. Werner
Real-Time Systems – Basics
1.1 Definition
deadline
10 / 30
osg.informatik.tu-chemnitz.de
Real-Time Systems – Basics
1.1 Definition
Socratic Dialogue
Socratic Dialogue
SOCRATES:
SOCRATES:
Doesn’t this imply that any computer is a real-time system?
If it includes all computer, isn’t the defintion senseless?
Answer:
Somehow yes. Taking the definition very precisely, any computer is a
real-time system because nobody wants to wait forever for a result, e.g., in
response to a keystroke.
Answer:
Okay, in order to stop this discussion, here is a new definition:
Refined Definition
A real-time system is any system that the lecturer sees as such.
In general, considerable work in real-time system design is spend on how timing constraints can
be met.
summer term 2015 ⋅ M. Werner
11 / 30
osg.informatik.tu-chemnitz.de
summer term 2015 ⋅ M. Werner
11 / 30
osg.informatik.tu-chemnitz.de
Real-Time Systems – Basics
1.1 Definition
Real-Time Systems – Basics
1.1 Definition
Misconceptions
Misconceptions (cont.)
“Misconceptions about Real-Time Systems”
[Sta88]
▸
▸
“There is no science in real-time-system design.”
▸
▸
▸
We will that reconsider later...
▸
Argument of a salesman: “Buy a faster computer!”
But: In case of a deadlock, this is not an improvement...
▸
▸
12 / 30
osg.informatik.tu-chemnitz.de
▸
▸
▸
(b) any Microsoft hardware accompanying the SOFTWARE will be
free from defects in materials and workmanship under normal use and service for
a period of one (1) year from the date of receipt.
This is no reason not to improve the design.
A system is as weak as the weakest element: It is our goal to ensure that operating
system or control software are not that weakest element.
▸
summer term 2015 ⋅ M. Werner
14 / 30
osg.informatik.tu-chemnitz.de
Consider the following guarantee:
PC Manufacturer warrants that
(a) the SOFTWARE will perform substantially in accordance with the
accompanying written materials for a period of ninety (90) days from the date of
receipt, and
In computer science usually peak performance or average performance are of
interest.
Operation research usually deals with stochastical models.
“It is not meaningful to talk about guaranteeing real-time performance when
things can fail.”
▸
osg.informatik.tu-chemnitz.de
What is the Problem?
“Real-time problems have all been solved in other areas of computer science or or
operations research.”
▸
13 / 30
Real-Time Systems – Basics
1.1 Definition
Misconceptions (cont.)
▸
Timeliness is more important than speed.
summer term 2015 ⋅ M. Werner
Real-Time Systems – Basics
1.1 Definition
▸
This may be necessary in some cases but as always in computer science we want to
automate as much as possible.
Real time needs conceptual understanding.
“Real time is performance engineering.”
▸
summer term 2015 ⋅ M. Werner
No. Time needed for computation has to be predictable.
“Real-time programming is assembly coding and driver programming.”
▸
“Advances in supercomputing hardware will take care of real-time requirements.”
▸
“Real-time computing is equivalent to fast computing.”
▸
Access via https://www.tu-chemnitz.de/∼werne/restricted-docs/Stankovic88Misconceptions.pdf
Hardware may fail, software is often faulty from beginning á software crisis
summer term 2015 ⋅ M. Werner
15 / 30
osg.informatik.tu-chemnitz.de
Real-Time Systems – Basics
1.1 Definition
Real-Time Systems – Basics
1.2 Time
What is the Problem? (cont.)
▸
▸
Something is next to trivial, something is impossible
We are interested in the area in between
▸
▸
What is time?
Window of scarcity
Example multimedia
“If nobody ask me what time is I know it, if I want to explain it, I don’t know it.”
AURELIUS AUGUSTINUS
Physical View
NEWTON: Absolute dimension (beside space) where reality exists.
EINSTEIN: Relative dimension as part of space-time.
Today: Direction of entropy’s increase.
Source: Anderson et al: Support for Continuous Media in the DASH System, 1990.
summer term 2015 ⋅ M. Werner
16 / 30
osg.informatik.tu-chemnitz.de
summer term 2015 ⋅ M. Werner
Real-Time Systems – Basics
1.2 Time
osg.informatik.tu-chemnitz.de
Real-Time Systems – Basics
1.2 Time
NEWTON’s Concept of Time
EINSTEINs Concept of Time (1905)
▸
Time is . . .
▸
▸
▸
Law of inertia is valid with respect to an (acceleration less) inertial systems
▸
Different inertial systems that are related to each other á there is one absolute
time (and space)
▸
▸
Philosophiae Naturalis Principia Mathematica, 1686
▸
▸
Absolute, true, and mathematical time, from its own nature, passes equably without
relation the anything external, and thus without reference to any change or way of
measuring of time (e.g., the hour, day, month, or year).
neither independent nor constant
part of the space-time (Minkowski space)
Constant here: speed of light
Consequences:
▸
There is no space-independent simultaneity
Speed of time depends on state of observer
Example: Lorentz transformation
Moving at speed of v in direction x
t − v2 x
t′ = √ c
,
2
1 − vc2
summer term 2015 ⋅ M. Werner
17 / 30
18 / 30
osg.informatik.tu-chemnitz.de
summer term 2015 ⋅ M. Werner
x − vt
x′ = √
2
1 − vc2
19 / 30
y ′ = y,
z′ = z
osg.informatik.tu-chemnitz.de
Real-Time Systems – Basics
1.2 Time
Real-Time Systems – Basics
1.2 Time
Thermodynamic Arrow of Time
▸
Mathematization
Laws of nature usually not differentiate between past and future
▸
Newton’s concept of time is usually mathematical reduced as follows:
á Symmetry (CPT (charge, parity and time) symmetry, PAULI, 1955)
▸
However: CP-Symmetry (charge and parity) can be broken
▸
Corresponds to Second Law of Thermodynamics (CLAUSIUS, 1854)
Inversion of the Second Law to define time: direction of entropy’s increase defines
thermodynamic arrow of time
▸
For practical reasons usually Newton’s concept of time is still in use (e.g., in this
lecture).
summer term 2015 ⋅ M. Werner
20 / 30
Time is a set M of discrete, distinguishable points in time with the relation “<”
(“temporally before”) that is defined as follows:
Trichotomy: ∀x, y ∈ M exactly one of the following conditions holds:
(x < y), (y < x), (x = y)
Transitivity: ∀x, y, z ∈ M ∶ (x < y) ∧ (y < z) ⇒ (x < z)
Irreflexivity: ∀x ∈ M ∶ ¬(x < x)
Densitity: ∀x, y ∈ M ∶ (x < y) ⇒ ∃z ∶ (x < z < y)
▸
osg.informatik.tu-chemnitz.de
Trichotomy, transitivity, and irreflexivity imply that “<” is a strong total order
summer term 2015 ⋅ M. Werner
Real-Time Systems – Basics
1.2 Time
Subdivisions
▸
Measuring of time is a problem since time can not be repeated
▸
Issue of standardization
First attempt: astrological phenomena
22 / 30
▸
Naive division of day (and night) into 12 hours; fixed phenomena: sun raise and
sun set
▸
▸
Day: Duration between two sun zeniths (solar day)
Year: Duration that the Sun takes to return to the same position in the cycle of seasons,
e.g., for example, the time from vernal equinox to vernal equinox (tropical year)
Month: period of the Moon’s phases
summer term 2015 ⋅ M. Werner
osg.informatik.tu-chemnitz.de
Real-Time Systems – Basics
1.2 Time
Measuring Time
▸
21 / 30
osg.informatik.tu-chemnitz.de
In use until 15th century
Issue: length of hours differs; except equinoxes
▸
Compensation by introduction of the mean solar day
▸
Second:
1
86400
of the mean solar day
summer term 2015 ⋅ M. Werner
23 / 30
osg.informatik.tu-chemnitz.de
Real-Time Systems – Basics
1.2 Time
Real-Time Systems – Basics
1.3 Real-Time Entity
SI Second
Real-Time Entity
▸
Astronomic phenomenons are not “precise enough”
▸
Remedy: definition without help of astronomy
▸
Embedded system: overall system consist of computer and non-computing
components
▸
The state of the non-computing components (and of the environment) are of
interest
á state variables
Second due to SI (1967)
▸
A second is the duration of 9,192,631,770 periods of the radiation corresponding to the
transition between the two hyperfine levels of the ground state of the caesium-133
atom.
▸
Examples: position of robot manipulator, speed, ...
Relevant state variables are called real-time entities
▸
Relevance due to two reasons:
▸
▸
▸
summer term 2015 ⋅ M. Werner
24 / 30
osg.informatik.tu-chemnitz.de
The application want to manipulate it
It manipulates/has impact to the application
Statements are valid for certain time only
summer term 2015 ⋅ M. Werner
Real-Time Systems – Basics
1.3 Real-Time Entity
25 / 30
osg.informatik.tu-chemnitz.de
Real-Time Systems – Basics
1.3 Real-Time Entity
"#$%#&'%#()
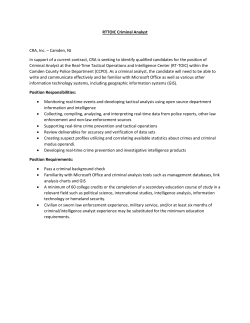
Real-Time Image
▸
>?8$32-
Mapping with help of sensors; sometimes multiple transformations
=3**
The mapping result is called real-time image
▸
▸
▸
▸
0#&%'&*+#(1#234&56#&%
The real-time entity is mapped to a state of the computation system
▸
▸
Accuracy
The applications uses always the image, but tries to impact the real-time entity
Mapping results may differ from real-time entity in value and time
Difference in time: temporal accuracy interval
%9:- %&;6
%&;!(((((%&<%4-#
7#3'(8&/#
The goodness of the real-time image is an important design parameter
@
@
summer term 2015 ⋅ M. Werner
26 / 30
osg.informatik.tu-chemnitz.de
@
A#,45-B426%('#%,%#(C&-%9$&#(D$#*#2%
7CE(=#$(:#9:3*+%#%#2(78()2%&%.
Figure: accuracy+&-%9$.
interval (from
[Kop97] )
7C& ,4/(0#&%B426%(%(&-%(#&2#(5#9$=2#%#(F#25#(G92(0#&%B426%#2(H%&I(%&;!I(JJJI(%&;6
! LM25#(=summer
3**<,D%
&E; ⋅,D%
&;6E(5&:%(,#&%'J(1#234&56#&%(32
term 2015
M. Werner
27 / 30
osg.informatik.tu-chemnitz.de
78(N/35#(&-%(,#&%'J(5#234(,4/(0#&%B426%(%&I(O#22(#PJ(%Q !(7C&R("3'4#D78 N/3
Real-Time Systems – Basics
1.3 Real-Time Entity
Real-Time Systems – Basics
1.3 Real-Time Entity
Sphere of Control
▸
Example
Each real-time entity may exist within a sphere of control (SoC)
▸
▸
Within a SoC, a real-time entity can be influenced
Influence works indirectly (via actors)
á Out of a SoC, a real-time entity may be observed, but not controlled
▸
environment
Example car:
▸
▸
▸
controlled
system
Real-time entities: traffic light, other cars, own speed
Traffic lights, other cars, their speeds, etc. can be observed
Own speed can be controlled á Sphere of control
summer term 2015 ⋅ M. Werner
28 / 30
osg.informatik.tu-chemnitz.de
Real-Time Systems – Basics
Literatur
[KS97]
C. M. Krishna and Kang G. Shin. Real-Time Systems. McGraw-Hill, 1997, Chapter 1 until
Section 1.3
[Kop97]
Hermann Kopetz. Real-Time Systems – Design Principles for Distributed Embedded
Applications. Kluver Academic, 1997, Section 1.1 and Chapter 5
[Sta88]
John A. Stankovic. “Misconceptions About Real Time Computing – A Serious Problem for
Next-Generation Systems”. In: IEEE Computer 21.10 (1988), pp. 10–19
[Mag96]
A.P. Magalh˜aes. “A Survey on Estimating the Timing Constraints of Hard Real-Time
Systems”. In: Design Automation for Embedded Systems 1 (1996), pp. 213–230. URL:
http://www.ingentaconnect.com/content/klu/daem/1996/00000001/
00000003/00114860
summer term 2015 ⋅ M. Werner
30 / 30
osg.informatik.tu-chemnitz.de
summer term 2015 ⋅ M. Werner
29 / 30
osg.informatik.tu-chemnitz.de









© Copyright 2026