
Asymptotic Results for Sample ACF and Extremes of Generalized Ornstein-Uhlenbeck Processes
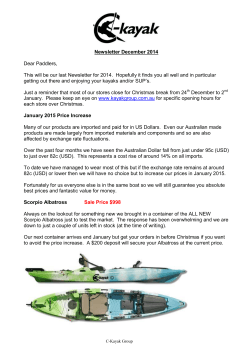
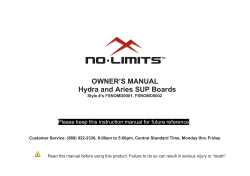
Asymptotic Results for Sample ACF and Extremes of Generalized Ornstein-Uhlenbeck Processes Vicky Fasen [email protected] Graduate Program ”Applied Algorithmic Mathematics” Munich University of Technology www-m4.ma.tum.de/pers/fasen/ Overview • Generalized Ornstein-Uhlenbeck (genOU) process • Tail behavior of a genOU process • Extremal behavior of a genOU process • Convergence of the sample ACF of a genOU process • Asymptotic behavior of a log-price process GenOU process A genOU (generalized Ornstein-Uhlenbeck) process is defined by Z t Vt = e−ξt eξs− dηs + V0 for t > 0 0 where • (ξt , ηt )t≥0 is a bivariate Lévy process • independent of the starting random variable V0 Examples for Vt = e−ξt R t ξs− e 0 dηs + V0 • Ornstein-Uhlenbeck process Z t Vt = e−λt eλs dηs + V0 0 Examples for Vt = e−ξt R t ξs− e 0 dηs + V0 • Ornstein-Uhlenbeck process Z t Vt = e−λt eλs dηs + V0 0 • Volatility process of the COGARCH(1,1) process Z t Vt = e−ξt β eξs− ds + V0 0 where ξt = ct − X log(1 + λec (∆Ls )2 ) 0<s≤t c > 0, λ ≥ 0, β > 0 and (Lt )t≥0 is a Lévy process 0 50 L 100 150 Volatility process of the COGARCH(1,1) model 2000 4000 6000 8000 10000 0 2000 4000 6000 8000 10000 10 6 8 sigma 12 14 0 L(t) = P N (t) k=1 Zk where Z1 ∼ N (0, 1), EN (1) = 1 and corresponding sample path of the volatility process of the COGARCH process with parameters β = 1, λ = 0.04 and c = 0.062 (bottom) Assumptions for the genOU process • (ξ, η) is a bivariate Lévy process of finite variation • η is a subordinator • The drift of ξ is non-zero, or there is no r > 0 such that the support of Πξ is concentrated on rZ • (Vt )t≥0 is not degenerate to a constant process Assumptions for the genOU process • (ξ, η) is a bivariate Lévy process of finite variation • η is a subordinator • The drift of ξ is non-zero, or there is no r > 0 such that the support of Πξ is concentrated on rZ • (Vt )t≥0 is not degenerate to a constant process • For some α > 0: Ee−αξ1 = 1 Assumptions for the genOU process • (ξ, η) is a bivariate Lévy process of finite variation • η is a subordinator • The drift of ξ is non-zero, or there is no r > 0 such that the support of Πξ is concentrated on rZ • (Vt )t≥0 is not degenerate to a constant process • For some α > 0: Ee−αξ1 = 1 • For some p, q > 1 with 1/p + 1/q = 1 and d > α: E|η1 |q max{1,d} < ∞, Ee−p max{1,d}ξ1 < ∞ Tail behavior of V0 V0 denotes the stationary distribution of V Reference: Lindner and Maller (2005) Tail behavior of V0 V0 denotes the stationary distribution of V lim xα P(V0 > x) = C x→∞ where C > 0. Reference: Lindner and Maller (2005) Tail behavior of V0 V0 denotes the stationary distribution of V lim xα P(V0 > x) = C x→∞ where C > 0. In the following an = C 1/α n1/α such that lim nP(V0 > an ) = 1 n→∞ Reference: Lindner and Maller (2005) Extremal behavior Discrete time skeleton Let h > 0 and Hk = sup (k−1)h≤s≤kh Vs for k ∈ N Discrete time skeleton Let h > 0 and Hk = sup Vs (k−1)h≤s≤kh z z 0 sup Vt = max Hk k=1,2,3 0≤t≤3h }| H1 H2 H3 }| {z }| {z }| h 2h { { 3h for k ∈ N Discrete time skeleton Let h > 0 and Hk = sup Vs for k ∈ N (k−1)h≤s≤kh z z 0 H1 }| {z h sup Vt = max Hk k=1,...,l 0≤t≤lh }| H2 H3 }| {z }| { 2h 3h { Discrete time skeleton Let h > 0 and Hk = sup for k ∈ N Vs (k−1)h≤s≤kh Then lim nP(H1 > an ) = E n→∞ z z 0 H1 }| {z h sup e−αξt 0≤t≤h sup Vt = max Hk k=1,...,l 0≤t≤lh }| H2 H3 }| {z }| { 2h 3h { Discrete time skeleton Let h > 0 and Hk = sup for k ∈ N Vs (k−1)h≤s≤kh Then lim nP(H1 > an ) = E n→∞ sup e−αξt 0≤t≤h sup e−ξs V0 ≤ H1 ≤ sup e−ξs V0 + sup 0≤s≤h 0≤s≤h 0≤s≤h Z 0 s e−(ξt −ξs− ) dηs Discrete time skeleton Let H(l) = (H1 , . . . , Hl ) = sup Vs , . . . , 0≤s≤h sup (l−1)h≤s≤lh Vs ! Multivariate regular variation of H(l) Let H(l) = (H1 , . . . , Hl ) = sup Vs , . . . , 0≤s≤h sup (l−1)h≤s≤lh Vs ! Then H(l) (l) P(|H | > ux, |H(l) | ∈ ·) n→∞ =⇒ x P(|H(l) | > u) −α E sup e−αξt 1 0≤t≤lh sup e ! −ξs (k−1)h≤s≤kh sup e−ξs 0≤s≤lh E sup e−αξs 0≤s≤lh k=1,...,m ∈· Multivariate regular variation of H(l) Let H(l) = (H1 , . . . , Hl ) = sup Vs , . . . , 0≤s≤h sup Vs (l−1)h≤s≤lh ! Then H(l) (l) P(|H | > ux, |H(l) | ∈ ·) n→∞ =⇒ x P(|H(l) | > u) −α E sup e−αξt 1 0≤t≤lh sup e ! −ξs (k−1)h≤s≤kh sup e−ξs 0≤s≤lh E sup e−αξs 0≤s≤lh k=1,...,m ∈· (Vt )0≤t≤1 is regularly varying (Hult and Lindkøg (2005)) Point process Nn = ∞ X ε(k/n,a−1 n Xk ) k=1 30 Nn([s,t)×(x,∞)) =3 25 Xk 20 anx 15 10 5 0 20 40 60 ns 80 100 120 nt 140 160 180 200 Point process behavior Nn = ∞ X n→∞ ε(k/n,a−1 =⇒ n Hk ) where ε(sk ,Qkj Pk ) k=1 j=0 k=1 P∞ ∞ X ∞ X k=1 ε(sk ,Pk ) is PRM(ϑ) with + ϑ(dt×dx)=dt×E sup e−αξs −sup e−αξs αx−α−11(0,∞) (x) dx 0≤s≤h P∞ s≤h and j=0 εQkj for k ∈ N are i. i. d point processes on [0, 1] with support in 1 Running maxima Let M (n) = sup0≤t≤n Vt = maxk=1,...,n Hk and h = 1. Then lim P(a−1 n M (n) ≤ x) T →∞ = lim P(Nn ((0, 1] × (x, ∞)) = 0) n→∞ = P(N ((0, 1] × (x, ∞)) = 0) = exp(−θx−α ) for x > 0 where θ=E sup e−αξt − sup e−αξt 0≤t≤1 t≥1 + Asymptotic behavior of the sample autocovariance function Stochastic recurrence equation Let h > 0. Then (Vnh )n∈N is the solution of a stochastic recurrence equation: Z nh Anh = e−(ξnh −ξ(n−1)h ) and Bnh = e−(ξnh −ξs− ) dηs (n−1)h for n ∈ N. Then Vnh = Anh V(n−1)h + Bnh for n ∈ N Point process behavior ∞ X n→∞ ε(k/n,a−2 =⇒ n Vkh V(k+l)h ) ε(s(l) ,Q(l) P (l) ) k=1 j=0 k=1 where ∞ X ∞ X P∞ k kj k (l) ε ) with (l) (l) is PRM(ϑ k=1 (s ,P ) k k α −α/2−1 ϑ (dt × dx) = dt × θl x 1(0,∞) (x) dx, 2 P∞ θl > 0 and j=0 εQ(l) for k ∈ N are i. i. d point processes (l) kj on [0, 1] with support in 1 Convergence of the sample ACF α ∈ (0, 2): Let h > 0. We define the sample autocovariance function γn,V (lh) = n−1 n−l X k=1 Vkh V(k+l)h for l ≥ 0 Convergence of the sample ACF α ∈ (0, 2): Let h > 0. We define the sample autocovariance function γn,V (lh) = n−1 n−l X Vkh V(k+l)h for l ≥ 0 k=1 Then n1−2/α γn,V (lh) n→∞ l=0,...,m =⇒ (Wl )l=0,...,m where (W0 , . . . , Wm ) is jointly α/2-stable in Rm+1 Convergence of the sample ACF α ∈ (2, 4): n−l Let h > 0. X γn,V (lh) = n−1 Vkh V(k+l)h for l ≥ 0 k=1 Suppose for l = 0, . . . , m, ! n−l X lim lim sup Var n−2/α Vkh V(k+l)h 1{|Vkh V(k+l)h |≤n2/α } = 0 ↓0 n→∞ k=1 Convergence of the sample ACF α ∈ (2, 4): n−l Let h > 0. X γn,V (lh) = n−1 Vkh V(k+l)h for l ≥ 0 k=1 Suppose for l = 0, . . . , m, ! n−l X lim lim sup Var n−2/α Vkh V(k+l)h 1{|Vkh V(k+l)h |≤n2/α } = 0 ↓0 n→∞ k=1 Then n1−2/α (γn,V (lh) − γV (lh)) n→∞ l=0,...,m =⇒ (Wl )l=0,...,m where (W0 , . . . , Wm ) is jointly α/2-stable in Rm+1 Convergence of the sample ACF α > 4: Let h > 0. γn,V (lh) = n−1 n−l X Vkh V(k+l)h for l ≥ 0, k=1 Then n1/2 (γn,V (lh) − γV (lh)) n→∞ l=0,...,m =⇒ (Wl )l=0,...,m where (W1 , . . . , Wm ) is multivariate normal with mean zero, covariance matrix ! ∞ X Cov(V0 Vih , Vkh V(k+j)h ) and W0 = EV02 k=−∞ i,j=1,...,m Asymptotic behavior of a log-price process Log-price process The log-price process G = (Gt )t≥0 is defined as Z tp Gt = Vs− dLs for t ≥ 0 0 where • (ξ, η, L) is a three-dimensional Lévy process • L is of finite variation • (−Lt )t≥0 is not a subordinator • E|L1 |q max{1,4d} < ∞ Point process behavior ∞ X n→∞ ε(k/n,a−1/2 =⇒ (G −G )) n k k−1 ε(sk ,Qkj Pk ) k=1 j=0 k=1 where ∞ X ∞ X P∞ k=1 ε(sk ,Pk ) is PRM(ϑ) with −2α−1 e ϑ(dt × dx)=dt × θ2αx 1(0,∞) (x) dx, P∞ e θ > 0 and j=0 εQkj for k ∈ N are i. i. d point processes on [0, 1] with support in 1 Asymptotic behavior of the price process 0 < α < 1/2: t −1/(2α) where S is 2α-stable t→∞ Gt =⇒ S Asymptotic behavior of the price process 0 < α < 1/2: t −1/(2α) t→∞ Gt =⇒ S where S is 2α-stable α > 1: t −1/2 t→∞ (Gt − EGt ) =⇒ N where N is normal distributed Asymptotic behavior of the price process 1/2 ≤ α < 1: Let (,n) e Gk = Z k k−1 p Vs− dLs 1{n−1/(2α) R k √V k−1 dL s− s ≤} Suppose for > 0, n, k ∈ N, and for all δ > 0: " n # ! X −1/(2α) (,n) (,n) e e Gk − nEG1 lim lim sup P n >δ =0 ↓0 n→∞ k=1 Asymptotic behavior of the price process 1/2 ≤ α < 1: Let (,n) e Gk = Z k k−1 p Vs− dLs 1{n−1/(2α) R k √V k−1 dL s− s ≤} Suppose for > 0, n, k ∈ N, and for all δ > 0: " n # ! X −1/(2α) (,n) (,n) e e Gk − nEG1 lim lim sup P n >δ =0 ↓0 n→∞ k=1 Then t −1/(2α) t→∞ (Gt − tEG1 ) =⇒ S where S is 2α-stable COGARCH(1,1) process The COGARCH(1,1) process is defined as Z tp Gt = Vs− dLs for t ≥ 0 0 where Z t eξs− ds + V0 Vt = e−ξt β 0 X ξt = ct − log(1 + λec (∆Ls )2 ) 0<s≤t COGARCH(1,1) process The COGARCH(1,1) process is defined as Z tp Gt = Vs− dLs for t ≥ 0 0 where Z t eξs− ds + V0 Vt = e−ξt β 0 X ξt = ct − log(1 + λec (∆Ls )2 ) 0<s≤t Suppose L is symmetric and α ∈ (0, 1). Then t −1/(2α) where S is 2α-stable t→∞ Gt =⇒ S References [1] BASRAK , B., DAVIS , R. A., AND M IKOSCH , T. (2002). Regular variation of GARCH processes. Stochastic Process. Appl. 99, 95–115. [2] DAVIS , R. AND H SING , T. (1995). Point process and partial sum convergence for weakly dependent random variables with infinite variance. Ann. Probab. 23 (2), 879–917. [3] DAVIS , R. AND M IKOSCH , T. (1998). The sample autocorrelations of heavy-tailed processes with applications to ARCH. Ann. Statist. 26 (5), 2049–2080. [4] FASEN , V. Asymptotic results for sample ACF and extremes of generalized Ornstein-Uhlenbeck processes. In preparation. ¨ [5] FASEN , V., K L UPPELBERG , C., AND L INDNER , A. (2006). Extremal behavior of stochastic volatility models. In: M. d. R. Grossinho, A. N. Shiryaev, M. L. Esquivel, and P. E. Oliviera (Eds.), Stochastic Finance. Springer, New York. [6] H ULT, H. AND L INDSKØG , F. (2005). Extremal behavior for regularly varying stochastic processes. Stoch. Process. Appl. 115, 249–274. ¨ [7] K L UPPELBERG , C., L INDNER , A., AND M ALLER , R. (2004). Continuous time volatility modelling: COGARCH versus Ornstein-Uhlenbeck models. In: Invited paper for the Bachelier Colloquium 2005. [8] L INDNER , A. M. AND M ALLER , R. (2005). Lévy integrals and the stationarity of generalised Ornstein-Uhlenbeck processes. Stochastic Process. Appl. 115, 1701–1722.










© Copyright 2026