
SmartTrigger Operations Manual TS Digital Power-Tracking Controller
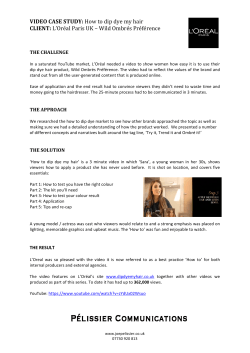
SmartTrigger™ Digital Power-Tracking Controller ST-1400 / ST-2400 and ST-1900 / ST-2900 TS ENGINEERING, INC. By 5.50 6.000 Bowl TS ENGINERING, INC. 240 High Street Washingtonville, Ohio 44490 Bowl 40 50 60 30 6.38 70 20 80 90 10 0 Model No. ST-1900 Vibratory Control 100 Set Point 120 Vac,50/60 Hz,15 Amps Total 2.500 Bowl OUTPUT Unit mounts with (4) #10-32 screws 120V AC ONLY 50 - 60 Hz Total 15A Max 4.94 Updated 2014 Operations Manual TS ENGINEERING, INC. 240 High Street Washingtonville, Ohio 44490 Phone: (800) 957-4390, (330) 427-0125 Fax: (330) 427-0800 www.tsengineering.com TS ENGINEERING, INC. Warranty TS Engineering, Inc. warrants that the equipment manufactured and sold by it will be, upon shipment, free of defects in workmanship or material. Should any failure to conform to this warranty become apparent during a period of one year after the date of shipment, TS Engineering, Inc. shall, upon prompt written notice from the purchaser, correct such nonconformity by repair or replacement, F.O.B. factory of the defective part or parts. Correction in the manner provided above shall constitute a fulfillment of all liabilities of TS Engineering, Inc. with respect to the quality of the equipment. THE FOREGOING WARRANTY IS EXCLUSIVE AND IN LIEU OF ALL OTHER WARRANTIES OF QUALITY WHETHER WRITTEN, ORAL, OR IMPLIED (INCLUDING ANY WARRANTY OF MERCHANTABILITY OF FITNESS FOR PURPOSE). TS ENGINEERING, INC. SHALL NOT BE LIABLE FOR ANY INCIDENTAL OR CONSEQUENTIAL DAMAGES OF ANY KIND RESULTING FROM THE USE OF THIS UNIT. TS Engineering, Inc. shall not be responsible for and the purchaser shall have no right to consequential damages resulting from the use of the unit due to causes beyond the control and without the fault or negligence of TS Engineering, Inc. including but not limited to acts of God, fire, negligent acts, civil unrest, power failures, power surges, flood, accident, actions of third parties, failure to follow proper installation, operation, or maintenance, unauthorized repairs, alterations, abuse, misuse, misapplication or improper environment. The remedy(ies) provided above shall be purchaser's sole remedy(ies) for any failure of TS Engineering, Inc. to comply with the warranty provisions, whether claims by the purchaser are based in contract or in tort (including negligence). Furthermore, TS Engineering, Inc. does not warrant equipment against normal deterioration due to environment. Factors such as corrosive gases, liquids and solid particulates can be detrimental and can create the need for repair or replacement as part of normal wear and tear during the warranty period. TS Engineering, Inc. will not be responsible for mechanical parts failing due to normal usage and service for which they were intended. Equipment supplied by TS Engineering, Inc. but not manufactured by it will be subject to the same warranty as is extended to TS Engineering, Inc. by the original manufacturer. Notations used in this manual This manual uses two symbols to draw attention to or denote actions, which should be performed cautiously, or avoided altogether. ! r Means TAKE NOTE of this statement, or BE CAUTIOUS when performing this action. Means DO NOT DO THIS, or DO NOT ALLOW THIS TO HAPPEN. 2 TS ENGINEERING, INC. Table of contents Warranty and notations used in this manual............................................................. 2 Introduction (figure 1)….................................................................................................. 5 External controls and connections............................................................................... 6 Motion sensor orientation (figures 2 and 3)...................................................................... 8 Operation setup (Quick start)........................................................................................ 9 ST-1400 / ST-2400 Circuit board (figure 4)................................................................... 10 ST-1400 / ST-2400 DIP switch location and settings (figure 5).................................... 11 ST-1400 / ST-2400 Jumper locations and settings (figure 6)........................................ 12 ST-1900 / ST-2900 Circuit board (figure 7)................................................................... 13 ST-1900 / ST-2900 DIP switch location and settings (figure 8).................................... 14 ST-1900 / ST-2900 Jumper locations and settings (figure 9)........................................ 15 Dip switch and jumper functions (all models) ………………………….……………... 16 A note about DIP switches 1 and 2 …………..……………………….………… 16 DIP switch 1 – Universal operate / hold enable ……………………………….... 16 DIP switch 2 – Universal emergency operate / hold enable …………………….. 17 DIP switch 3 – Soft start ………………………………….……………………... 18 DIP switches 4 and 5 – Open loop power level ……………………..….………. 18 DIP switches 4 and 5 – Closed loop sensor gain …………………….…………. 19 DIP switch 6 – Phase select ……………………………………………….……. 19 DIP switches 7 and 8 – Output frequency …………………….……………..…. 20 DIP switch 9 – Closed loop gain ………………………….……………………. 20 Default factory DIP switch settings and functions ………………………..……. 20 Jumper settings JMA to JMF ……………………………………………...……. 21 3 TS ENGINEERING, INC. Table of Contents Internal adjustments .................................................................................................... 22 R6 - Power supply adjustment (ST-1900 and ST-2900 only) R14 - On delay R23 - Off delay R34 - Max amplitude limit Using the universal operate / hold function................................................................. 23 Contact closure controlled universal operate / hold input Voltage controlled universal operate / hold input Using the universal emergency operate / hold function.............................................. 24 Contact closure controlled universal emergency operate / hold input Voltage controlled universal emergency operate / hold input The +5 volt interlock / status output ……………………………..……………….……25 Using the +5 volt interlock / status output Motion sensor cable color coding and wiring details ………………………..………. 26 Smart Trigger wiring diagrams and terminal details ................................................ 27 Circuit board wiring diagram and terminal reference ST-1400 and ST-2400 (figure 10) ....................................................................... 28 ST-1900 and ST-2900 (figure 11) …………………………….……………………29 Troubleshooting guide .................................................................................................... 30 Model number information............................................................................................. 31 4 TS ENGINEERING, INC. Introduction The SmartTrigger by TS Engineering, Inc. is an intelligent vibratory feeder controller that is capable of delivering a uniform level of drive voltage to the feeder coils regardless of fluctuations in the source line. By monitoring both the amplitude and frequency of the input line the controller can perform on-the-fly adjustments to the trigger timing of the output alternistor and maintain the desired vibration intensity level. The unit can correct for input line fluctuations. The standard unit without sensor is considered a voltage regulating controller. The SmartTrigger with the sensor option is considered an amplitude regulating control. The four models covered in this manual (ST-1400, ST-1900, ST-2400 and ST-2900) are functionally identical except for the on board adjustable power supply and additional filtering circuits included in the ST-1900 and ST-2900 models. The ST-1400 and ST-2400 models have two extra positions on TB2 (terminal block 2) to connect an external power supply. Connector End View Top View 5 10 Heatsink 6 40 50 60 30 70 20 80 4 Vibration Intensity (set point adjust) Power 'ON' Indicator 3 Remote Wiring access hole Photo Sensor Connector (optional) 7 Motion Sensor Connector (optional) OUTPUT 120V AC ONLY 50 - 60 Hz Total 15A Max 2 Power Switch 8 Fuse (15 A) Max. 90 10 0 100 Set Point 9 Feeder Output Connector Figure 1. SmartTrigger™ Digital Power-Tracking Controller 5 1 AC Input Cable TS ENGINEERING, INC. External controls and connections (see figure 1) 1. AC input cable - This AC power cord supplies power to the Smart Trigger and plugs into a standard 110 or 220 Volt AC outlet. The 110VAC versions (ST-1400 and ST-1900) require between 95-140 Volts AC at 50/60 Hertz. The 220VAC versions (ST-2400 and ST-2900) require 190–250 Volts AC at 50/60 Hertz. r USE OF AN INPUT VOLTAGE HIGHER THAN THE RATED MAXIMUM (140 VOLTS RMS FOR THE 110 UNIT AND 250 VOLTS RMS FOR THE 220 VOLT UNIT) CAN DAMAGE THE CONTROLLER AND VOID YOUR WARRANTY! 2. Power switch - This switch turns the Smart Trigger on and off. Upon power up, there is a 0.2 second pause for internal calibration that may be followed by a soft start delay of 0.8 second depending on the setting of dip switch 3. ! ALWAYS TURN POWER OFF BEFORE CONNECTING OR DISCONNECTING A FEEDER OR REPLACING THE INPUT FUSE! 3. Remote wiring access hole - The Smart Trigger is delivered with this hole covered by a metal snap-in cap. A cord grip may be installed for securing external wiring for access to the interlocking, universal and emergency operate / hold features of the unit by switches, relays, photo sensors, PLC’s…etc. 4. Vibration intensity (set point adjust) - This control selects the desired output power level to adjust the vibration intensity of the feeder. 5. Power on indicator - When illuminated, this indicates that the unit is powered on. 6. Photo sensor connector (optional) – The Smart Trigger is normally delivered with this hole covered with a plastic hole plug. A four pin threaded female connector is installed at this location on models with a –P suffix (ST-XX00-P) and is wired for remote hold using a NPN or PNP (active HI or LO) photo sensor. See page 31 for further information. 7. Motion sensor connector (optional) - The Smart Trigger is normally delivered with this hole covered with a plastic hole plug. A five pin threaded female DIN connector is installed at this location on models with a –M suffix (ST-XX00-M) to connect the Smart Trigger to a motion sensor if required for tighter control of the output power level. See page 31 for further information. 8. Fuse – This fast blow AC input fuse should be large enough to meet the feeder coil requirements, but must not to exceed 15 amps maximum for any Smart Trigger model. 6 TS ENGINEERING, INC. 9. Feeder output connector - Supplies the output power to drive the feeder coils. This variable power output is controlled by the vibration intensity (set point) adjustment. Several different connector options are available. See page 31 for further information. ! ONLY A FEEDER’S DRIVE COILS SHOULD BE CONNECTED TO THIS OUTLET! 10. Heatsink - Dissipates the heat generated by the electronics. It is specified for a continuous 15 Amp RMS output current in an ambient temperature environment of 45° Celsius. AT HIGH VALUES OF CONTINUOUS LOAD CURRENT THE HEAT SINK MAY BECOME HOT TO THE TOUCH. DO NOT BLOCK AIRFLOW AROUND THE HEATSINK DURING ! OPERATION! THE UNIT SHOULD BE MOUNTED WITH THE HEATSINK FINS UPRIGHT TO ALLOW FOR PROPER COOLING. 7 TS ENGINEERING, INC. Motion Sensor orientation (Optional) There are two styles of motion sensor that can be used with the Smart Trigger. Both are interchangeable and differ in appearance only. The sensor must be mounted so that its axis of sensitivity is parallel with the motion of the feeder. For a bowl feeder, the sensor should be mounted near the perimeter of the bowl with the direction of the mounting screws pointing in the direction of parts flow. Old Style Sensor Sensor can detect motion only along this axis Figure 2. Motion Sensor Axis of Sensitivity New Style Sensor can detect motion only along this axis Direction of Bowl Motion Motion Sensor Axis of Sensitivity Figure 3. Illustration of proper mounting orientation on a bowl feeder utilizing a right-angle bracket secured to the bowl perimeter Figure 3 shows an example of a mounting strategy for bowl feeders using a right-angle bracket mounted to the exterior of the bowl. The motion sensor MUST be mounted so that its orientation with respect to bowl motion is the same as that shown in Figure 3, regardless of the mounting method used. At the other end of the motion sensor cable is a 5 pin male DIN connector. This fits into the 5 pin female DIN connector located on the connector side of the Smart Trigger controller. 8 TS ENGINEERING, INC. Operation setup (Quick start) The controller is designed and factory preset to require very few adjustments. On most feeders only the following setup procedure should be required. 1. You may wish to replace the controller fuse (factory value is 15 amps fast blow) with one which is rated for the maximum drive coil current rating of your feeder to prevent accidental over driving. Do not use a fuse rated over 15 Amps for any model! 2. Plug the Smart Trigger into a standard outlet rated to deliver 95-140 Volts RMS AC @ 50/60 Hertz for the 110 volt models or 190-250 Volts RMS AC @ 50/60 Hertz for the 220 volt models. r USE OF AN INPUT VOLTAGE HIGHER THAN THE RATED MAXIMUM (140 VOLTS RMS AC OR 250 VOLTS RMS AC) CAN DAMAGE THE CONTROLLER AND VOID YOUR WARRANTY! 3. Connect the drive coils of your feeder to the output connector. 4. Turn on the unit via the Power switch located on the right side of the unit. 5. Upon power up there is a 0.2-second pause for internal calibration that may be followed by a soft start delay of 0.8 seconds (depending on the setting of DIP switch 3), after which the controller will begin normal operation. 6. Adjust the Vibration Intensity (set point adjust) knob to achieve the desired amplitude of vibration. The controller will then maintain this vibration intensity level independent of any line voltage fluctuations. 9 TS ENGINEERING, INC. The circuit board (ST-1400 / ST-2400) ! TO INSURE OPERATOR SAFETY, INTERNAL ADJUSTMENTS AND/OR FUSE SERVICING SHOULD ALWAYS BE DONE WITH THE SMART TRIGGER TURNED OFF AND UNPLUGGED! Located on the circuit board are three user adjustable trim-pots labeled R14 (on delay), R23 (off delay), R34 (maximum amplitude). The DIP switches are for setting up the controller operating parameters. The micro controller (U6) has the stored operating program. Off Delay Adjust 0 to 17 Seconds R14 On Delay Adjust 0 to 17 Seconds Heatsink Mtg. (this side) Q1 C2 Output R21 C13 Neutral D8 D9 U1 C15 U8 R5 R2 R3 R4 120V 120V JMF R39 D10 D1 D2 D11 R20 C5 1 2 3 C3 + R38 U2 C17 R32 R33 R34 C11 D4 R19 C12 D3 Jumper Storage 120V Input Power U6 R40 Gnd Remote Hold - switch (no timers) Neutral N/C JME Output Power Neutral C14 C16 R41 C18 (+) DC Universal Input (+) DC (no timers) Output R1 R24 R25 X1 U9 JMD Remote Hold - switch (timers) Gate R35 JMC (+) DC Gnd R23 R26 R27 R28 R30 R29 R31 U7 Ground Universal Input (+) DC (timers) C1 U3 R22 D5 R44 Input Signal +5v Interlock R37 R36 R14 D6 Photo-eye Input R43 (+) DC volts JMG - Input Power On LED (-) + Input Ground Customer Inputs Power On LED (+) Amplitude Pot 0-5V Analog In Amplitude Pot Signal Ground Motion Sensor Amplitude Pot (+) Ground Sensor Signal +5V Sensor Pwr R34 Max. Amplitude Limit (Range Selected With Dip Switches 4 and 5) SW1 (Factory Setting) Customer Inputs Figure 4. ST-1400 / ST-2400 circuit board DIP switches and trim pots 10 TS ENGINEERING, INC. Dip switch location and settings (ST-1400 /ST-2400) D8 D9 D1 R5 D2 R2 U1 R3 D11 R4 U6 D10 R21 C13 R32 R33 U2 1 2 3 C3 + R34 C5 C16 C11 C15 29 R31 D4 R41 R40 R39 U8 R19 R38 R20 D3 C17 JMG C18 JMF C12 JME U9 Figure 5. ST-1400 / ST-2400 DIP switch location and settings 11 TS ENGINEERING, INC. Jumper locations and settings (ST-1400/ST-2400) Q1 R14 (+) DC volts Photo-eye Input Input Signal R23 Ground +5v Interlock Universal Input (+) DC (timers) JMC (+) DC Gnd JMD Jumper JMC and JMD for connection of Photo-eye to Universal Remote Hold with Timer selection Remote Hold - switch (timers) Universal Input (+) DC (no timers) Remote Hold - switch (no timers) (+) DC JME Gnd JMF R34 Storage Header Figure 6. ST-1400 / ST-2400 Jumper locations and settings 12 TS ENGINEERING, INC. The circuit board (1900/2900) ! TO INSURE OPERATOR SAFETY, INTERNAL ADJUSTMENTS AND/OR FUSE SERVICING SHOULD ALWAYS BE DONE WITH THE SMART TRIGGER TURNED OFF AND UNPLUGGED! Located on the circuit board are four user adjustable trim-pots labeled R6 (10 to 35 volt power supply adjustment), R14 (on delay), R23 (off delay), R34 (maximum amplitude). The DIP switches are for setting up the controller operating parameters. The micro controller (U6) has the stored operating program. R23 Off Delay Adjust 0 to 17 Seconds R14 On Delay Adjust 0 to 17 Seconds Heatsink Mtg. (this side) Q1 R37 C1 C2 R36 R14 D6 U3 R22 C9 U5 Neutral JM2 Neutral JM1 120V JME BR1 C15 U8 D2 UI / ERH (+) 120V R4 UI / ERH (-) C3 + C4 R3 1 SW / ERH 120V R39 JMF C17 U2 2 2 3 D1 R38 3 R5 1 R1 U1 R6 R32 R33 R34 C11 D4 R19 C12 D3 Jumper Storage R2 C5 R20 R7 Remote Hold Emergency (no timers) (switch) SW / ERH Input Power N/C D7 R40 U6 C10 R42 R18 JM3 Output Power U4 Q2 R16 R17 R21 C13 C16 R41 SW / RH Output Neutral R13 C19 R8 C8 C14 JMD SW / RH C7 R24 R25 X1 U9 UI / RH (-) Output R23 JMC UI / RH (+) C18 Remote Hold Universal (timers) Universal (switch) Input Input (timers) Emergency (voltage) (no timers) (voltage) R26 R27 R28 R30 R29 R31 U7 +5V Interlock Gate C6 R35 Photoeye Sig. Ground R9 R11 R12 R10 D5 R44 R43 Photo-eye Input Photoeye (+) JMB JMG Ground 0-20 ma Analog Input (+) 0-5V Analog Input (+) Power On LED Amplitude Pot Signal Ground Motion Sensor Amplitude Pot (+) Ground Sensor Signal +5V Sensor Pwr R34 Max. Amplitude Limit (range selected with DIP switches 4 and 5) SW1 (Factory Setting) R6 (10-24v P/Supply Adj.) Amplitude Pot Figure 7. ST-1900 / ST-2900 circuit board DIP switches and trim pots 13 TS ENGINEERING, INC. Dip switch location and settings (ST-1900/ST-2900) JM2 C3 + JM1 J R4 Q2 C10 R42 R18 D7 D1 R2 R1 JMB BR1 R16 R17 1 3 U6 2 15 R8 C R3 U1 R21 C13 R32 R33 R5 R6 14 R34 R7 U2 C15 C5 C4 C16 29 R31 1 D2 R41 R40 2 C11 3 D4 R39 U8 R19 R38 R20 D3 C17 JMG JMF J C18 JME C12 Figure 8. ST-1900 / ST-2900 DIP switch location and settings 14 TS ENGINEERING, INC. Jumper locations and settings (ST-1900/ST-2900) Q1 R14 (+) DC volts Photo-eye Input Input Signal R23 Ground +5v Interlock Universal Input (+) DC (timers) JMC (+) DC Gnd JMD Jumper JMC and JMD for connection of Photo-eye to Universal Remote Hold with Timer selection Remote Hold - switch (timers) Universal Input (+) DC (no timers) Remote Hold - switch (no timers) (+) DC JME Gnd JMF JMB R34 Storage Header Figure 9. ST-1900 / ST-2900 Jumper locations and settings 15 TS ENGINEERING, INC. Dip switch and jumper functions (all models) This section describes some of the advanced features that are available for use with the unit as well as suggested adjustments to enhance feeder performance. A note about DIP switches 1 and 2 The universal operate / hold and emergency operate / hold functions work together to control the Smart Trigger. If both functions are enabled, they must BOTH be commanded to operate (run) mode to produce an output. If either of them selects hold (stop), the output will be stopped. DIP switch 1 - Universal input for operate / hold (see figure 6 or 7) If enabled (with jumpers JMC and JMD removed), any AC or DC voltage from 5 Volts RMS (minimum) to 120 Volts RMS (maximum) applied to TB3 terminals 5 and 6 will put the unit in operate (run) mode. Removal of this voltage will cause the unit to hold (stop). This input is optically isolated from all other internal circuitry when jumpers JMC and JMD are removed. Installing jumpers JMC and JMD (factory default) allows this input to be used by the photo sensor input at TB3 terminals 1, 2 and 3 on all models. See page 31 for details. On ST-X400 models, an external 10 to 30 VDC power supply must be connected to TB2 terminals 11 (+) and 12 (-) to supply power to the photo sensor and internal electronics to operate as above with jumpers JMC and JMD installed (factory default). An external power supply is not required to use the voltage controlled operate / hold function as described above with jumpers JMC and JMD removed. This function can also be controlled by a dry contact closure (switch) applied to TB3 terminals 7 and 8. A contact closure will cause the unit to hold (stop). Opening the contacts will cause the unit to operate (run). The time delay controls ON (R14) and OFF (R23) ONLY apply to this input. See page 23 for details and note the warning below. Switch 1 = open Switch 1 = closed r Universal input enabled Universal input disabled (factory default) CONTACT CLOSURE MEANS A NON-POWERED DRY CONTACT. IF ANY VOLTAGE IS APPLIED TO THE CONTACT CLOSURE INPUTS, SEVERE DAMAGE MAY OCCUR TO UNIT. THIS IS MEANT TO BE A SWITCH, RELAY CONTACT OR OTHER NON-POWERED CONNECTION. APPLYING ANY VOLTAGE ACROSS THE CONTACT CLOSURE INPUTS MAY DAMAGE THE CIRCUIT AND VOID YOUR WARRANTY! 16 TS ENGINEERING, INC. DIP switch 2 - Universal input for emergency operate / hold (see figure 6 or 7) If enabled with jumpers JME and JMF removed (factory default), any AC or DC voltage from 5 Volts RMS (minimum) to 120 Volts RMS (maximum) applied to TB3 terminals 9 and 10 will put the unit in operate (run) mode. Removal of this voltage will cause the unit to hold (stop). This input is optically isolated from all other internal circuitry when jumpers JME and JMF are removed (factory default). Installing jumpers JME and JMF allows this input to be used by the photo sensor input at TB3 terminals 1, 2 and 3 on all models. See page 31 for details. On ST-X400 models, an external 10 to 30 VDC power supply must be connected to TB2 terminals 11 (+) and 12 (-) to supply power to the photo sensor and internal electronics to operate as above with jumpers JME and JMF installed. An external power supply is not required to use the voltage controlled operate / hold function above with jumpers JME and JMF removed (factory default). This function can also be controlled by a dry contact closure (switch) applied to TB3 terminals 11 and 12. A contact closure will cause the unit to hold (stop). Opening the contacts will cause the unit to operate (run). The ON (R14) and OFF (R23) time delays DO NOT apply to this EMERGENCY input. This allows instant EMERGENCY operate (run) / hold (stop) control of the unit. See page 24 for details and note the warning below. Switch 2 = open Switch 2 = closed r Emergency universal input enabled Emergency universal input disabled (factory default) CONTACT CLOSURE MEANS A NON-POWERED DRY CONTACT. IF ANY VOLTAGE IS APPLIED TO THE CONTACT CLOSURE INPUTS, SEVERE DAMAGE MAY OCCUR TO UNIT. THIS IS MEANT TO BE A SWITCH, RELAY CONTACT OR OTHER NON-POWERED CONNECTION. APPLYING ANY VOLTAGE ACROSS THE CONTACT CLOSURE INPUTS MAY DAMAGE THE CIRCUIT AND VOID YOUR WARRANTY! 17 TS ENGINEERING, INC. DIP switch 3 - Soft start (see figure 6 or 7) Enabling the soft start causes power to the feeder bowl to ramp up to the set point over a period of approximately 0.8 seconds when switching from hold (stop) to operate (run) mode. This will prevent surges associated with starting the feeder while running at high output levels. Disabling the soft start causes the controller to return directly to the setpoint with no delay when switching from hold (stop) to operate (run). Switch 3 = open Switch 3 = closed Soft start disabled Soft start enabled (factory default) DIP switches 4 and 5 - Power output range select (open loop mode) (see figure 6 or 7) When operating in open-loop mode (WITHOUT a motion sensor connected), DIP switches 4 and 5 control the maximum output power to the feeder reducing it from 100% to 75% to 50% to 37.5% of maximum. This improves the resolution of the vibration intensity (set point) control and limits the output power for devices that operate at lower power levels than the maximum output level the controller is capable of delivering. This range can be further fine tuned with the maximum amplitude limit control (R34) near TB2 on all models. Adjusting R34 fully counterclockwise selects the maximum amplitude in the range. Adjusting R34 full clockwise selects the minimum amplitude in the range. R34 is factory set to its midpoint, but it may be adjusted as needed by the end user. R34 is a single turn control and it can be damaged by rotation beyond its stops. Switch 4 = closed Switch 5 = closed 100% to 66% Switch 4 = closed Switch 5 = open 75% to 50% Switch 4 = open Switch 5 = closed 50% to 33% Switch 4 = open Switch 5 = open 37.5% to 25% (factory default) 18 TS ENGINEERING, INC. DIP switches 4 and 5 - Sensor gain select (closed loop mode) (see figure 6 or 7) When operating in closed-loop mode (WITH a motion sensor connected), DIP switches 4 and 5 control the motion sensor circuitry gain. This allows matching of the range of the vibration intensity (set point) control to the required physical motion of the feeder. Higher motion sensor gain values will result in lower vibration levels. For devices that move a lot with very low power input, a gain of 8 may be required. For feeder devices that require a lot of power to generate the required motion, lower motion sensor gain values will work best. The motion sensor gain can be further fine tuned with the maximum amplitude limit control (R34) near TB2 on all models. Adjusting R34 fully counterclockwise selects the maximum amplitude in the range. Adjusting R34 full clockwise selects the minimum amplitude in the range. R34 is factory set to its midpoint, but it may be adjusted as needed by the end user. R34 is a single turn control and it can be damaged by rotation beyond its stops. Switch 4 = closed Switch 5 = closed Motion sensor gain = 1 Switch 4 = closed Switch 5 = open Motion sensor gain = 2 Switch 4 = open Switch 5 = closed Motion sensor gain =4 Switch 4 = open Switch 5 = open Motion sensor gain = 8 (factory default) DIP switch 6 - Phase select (see figure 6 or 7) This feature selects which cycle of the AC power mains input is used by the Smart Trigger to produce an output. This setting is relevant ONLY on the 30 Hz and 60 Hz output settings (25 Hz and 50 Hz on 50 Hz source lines) since they operate only on one half of the AC input. The 40 Hz and 120 Hz settings (33.3 Hz and 100 Hz on 50 Hz source lines) use both halves of the AC input. This allows the user to balance the load equally on both halves of the AC power mains input. For example, if four equal sized 60 Hz feeders were being run on the same AC circuit, it is recommended to set two of them to the positive phase and two to the negative phase to balance the load on the AC power mains. If operating three feeders on the same AC circuit, moving the one that generates the highest output power to the opposite phase of the other two will help balance the load on the AC power mains. Switch 6 = open Switch 6 = closed Positive phase of power mains selected Negative phase of power mains selected 19 (factory default) TS ENGINEERING, INC. DIP switches 7 and 8 - Output frequency (see figure 6 or 7) This feature changes the output frequency of the Smart Trigger. The available output frequencies are dependent on the frequency of the AC power input line as illustrated below: Switch 7 = closed Switch 8 = closed Input = 60 Hz, Output = 120 Hz Input = 50 Hz, Output = 100 Hz Switch 7 = closed Switch 8 = open Input = 60 Hz, Output = 60 Hz Input = 50 Hz, Output = 50 Hz Switch 7 = open Switch 8 = closed Input = 60 Hz, Output = 40 Hz Input = 50 Hz, Output = 33.3 Hz Switch 7 = open Switch 8 = open Input = 60 Hz, Output = 30 Hz Input = 50 Hz, Output = 25 Hz (factory default) DIP switch 9 - Closed loop gain selection (see figure 6 or 7) This feature controls the response time of the Smart Trigger in the closed loop mode (WITH a motion sensor connected) to sudden changes in the vibration intensity of the feeder due to parts loading, power line fluctuations or rapid changes to the vibration intensity (set point) control. This switch has no effect in the open loop mode (WITHOUT a motion sensor connected). Use the high loop gain setting for the fastest response. If the feeder vibration intensity oscillates, use the low gain setting. Switch 9 = open Switch 9 = closed Loop gain high Loop gain low (factory default) Default factory DIP switch settings and functions (see figure 6 or 7) Switch setting Function selected (with) 60 Hz input (50 Hz input) Dip switch 1 – closed Dip switch 2 – closed Dip switch 3 – closed Dip switch 4 – closed Dip switch 5 – closed Dip switch 6 – closed Dip switch 7 – closed Dip switch 8 – open Dip switch 9 – open Universal operate / hold input DISABLED Emergency universal operate / hold input DISABLED Soft start ENABLED 100% output (open loop), sensor gain = 1 (closed loop) 100% output (open loop), sensor gain = 1 (closed loop) Negative half of AC power mains selected Output frequency = 60 Hz (50 Hz) Output frequency = 60 Hz (50 Hz) High gain (closed loop) 20 TS ENGINEERING, INC. Jumper Settings JMA thru JMF NOTE: A storage header labeled JMG is provided on all models located next to TB2 terminal 1. Place all unused jumpers on JMG to prevent their loss. JMA - Installing jumper JMA (factory default) enables control of the Smart Trigger with the front panel vibration intensity (set point) adjustment. Removing JMA switches control of the Smart Trigger output level to an external 0 to +5VDC control voltage or a 0 to +20 ma current source. DO NOT EXCEED +5VDC OR +20 MA OR APPLY A NEGATIVE EXTERNAL CONTROL VOLTAGE OR CURRENT. For ST-X400 models, removing JMA enables (0 to +5VDC) output level control input at TB2 terminals 7 (+0 to +5VDC) and 8 (ground). For 0 to 20 ma current source control, a 270 Ohm 1/4 watt or higher resistor must be added across TB2 terminals 7 and 8. For ST-X900 models, removing JMA enables (0 to +5VDC) output level control input at TB2 terminals 8 (+0 to +5VDC) and 6 (ground). For a 0 to 20 ma current source, the control input is connected to TB2 terminals 10 (0 to +20 ma) and 6 (ground). JMB - (ST-X900 models only) – JMB configures TB2 terminal 9. It has 3 terminals (two possible configurations) and is NOT installed at the factory. Installing JMB on the stake in the center and the one closest to TB2 terminal 10 will tie TB2 terminal 9 to ground. Installing JMB on the stake in the center and the one closest to TB2 terminal 1 will tie TB2 terminal 9 to the on board adjustable power supply output. DO NOT DRAW MORE THAN 250 MA FROM THIS POWER SOURCE. A note about jumpers JMC, JMD, JME and JMF Jumpers (JMC with JMD) and (JME with JMF) work in pairs to assign the photo sensor input at TB3 terminals 1 (+), 2 (photo sensor signal) and 3 (ground) to the universal operate / hold OR universal emergency operate / hold functions. You may choose one or the other, but choosing both functions together serves no useful purpose. Installing jumpers JMC and JMD will conflict with using the voltage controlled universal operate / hold input at TB3 terminals 5 and 6. Installing jumpers JME and JMF will conflict with using the voltage controlled universal emergency operate / hold input at TB3 terminals 9 and 10. These jumpers have no effect on the universal operate / hold contact closure input at TB3 terminals 7 (switch) and 8 (ground) OR the universal emergency operate / hold contact closure input at TB3 terminals 9 (switch) and 10 (ground). JMC and JMD – Installing these jumpers (factory default) configures the photo sensor input to control the universal operate (run) / hold (stop) input that is enabled with DIP switch 1. JME and JMF – Installing these jumpers (not factory installed) configures the photo sensor input to control the universal emergency operate (run) / hold (stop) input that is enabled with DIP switch 2. 21 TS ENGINEERING, INC. Internal adjustments (all models) (R6) +10 to 35 volt power supply adjustment (ST-1900 / ST-2900 only) (see figure 5) This control is factory set to +24.5 volts DC. It is used to adjust the internal power supply output voltage used to operate the photo sensor connected to TB3 terminals 1, 2 and 3. The specified range of this adjustment is from +10 volts DC to +35 volts DC. Its maximum range is +9 to +42.5 VDC (DO NOT EXCEED +35VDC). This is a 10 turn control with a clutch. A click can be heard when rotating this control past its limits, but no damage to the control will occur. The click means that no further adjustment in that direction is possible. Clockwise rotation raises the output voltage; counterclockwise rotation reduces the output voltage. The photo sensor is connected to TB3 terminals 1 (V+), 2 (photo sensor signal) and 3 (ground). On ST-XX00-P models, this connection is available on the enclosure 4 pin female photo sensor connector (see figure 1) as follows: 1 (V+), 2 (not used), 3 (ground) and 4 (photo sensor signal). (R14) On delay (all models) (see figure 4 or 5) R14 is an adjustable time delay that may be set by the user if required. This timer begins running at the start of the command to operate (run) from the universal operate / hold input. The output signal is held off until this timer runs out. The timer range is 0 to 17 seconds. Clockwise rotation reduces this time delay, counterclockwise rotation increases the delay. Use caution when adjusting this control. This is a single turn control and it can be damaged by rotation beyond its stops. The factory default setting for the on delay is zero seconds. Any change from operate to hold, or hold to operate will reset this timer. This delay only applies to the universal operate / hold input. The emergency operate / hold input has no delay. (R23) Off delay (all models) (see figure 4 or 5) R23 is an adjustable time delay that may be set by the user if required. This timer begins running at the start of the command to hold (stop) from the universal operate / hold input. The output signal continues until this timer runs out. The timer range is 0 to 17 seconds. Clockwise rotation reduces this time delay, counterclockwise rotation increases the delay. Use caution when adjusting this control. This is a single turn control and it can be damaged by rotation beyond its stops. The factory default setting for the off delay is zero seconds. Any change from operate to hold, or hold to operate will reset this timer. This delay only applies to the universal operate / hold input. The emergency operate / hold input has no delay. (R34) Maximum amplitude limit (all models) (see figure 4 or 5) R34 adjusts the maximum output power from the Smart Trigger. The range of this control is set with DIP switches 4 and 5 in closed and open loop modes. Counterclockwise rotation increases the output power; clockwise rotation reduces the output power. This is a single turn control and it can be damaged by rotation beyond its stops. R34 is factory set to its midpoint. 22 TS ENGINEERING, INC. Using the universal operate / hold function Contact closure controlled universal operate / hold input See figures 4 and 6 (ST-X400) or figures 7 and 9 (ST-X900) r CONTACT CLOSURE IS A NON-POWERED DRY CONTACT. IF ANY VOLTAGE IS APPLIED TO THE CONTACT CLOSURE INPUTS, SEVERE DAMAGE MAY OCCUR TO THE UNIT AND WILL VOID THE WARRANTY. Connecting a switch across TB3 terminals 7 and 8 will provide the ability to switch between operate and hold conditions remotely. A switch closure will put the unit in hold (stop) mode after the time delay (if any) determined by R23. Opening the switch will put the unit in operate (run) mode after the time delay (if any) determined by R14. See page 22 for setting these time delays. DIP switch 1 must be closed to enable this operate / hold contact closure function without any voltage applied to the universal operate / hold input below. With DIP switch 1 open (to enable the voltage controlled input below), closing this remote switch will force the unit to hold (stop) if the control voltage below is applied. In this condition, removal of the control voltage below has priority and will hold (stop) the output. Opening the remote switch in this case will NOT restart the output until the control voltage below is reapplied. r CONNECTING ANY VOLTAGE ACROSS THE CONTACT CLOSURE OPERATE / HOLD INPUTS (TB3 TERMINALS 7 and 8) MAY DAMAGE THE CIRCUIT AND VOID YOUR WARRANTY! THIS IS MEANT TO BE A SWITCH, RELAY CONTACT OR OTHER NONPOWERED CLOSURE. Voltage controlled universal operate / hold input See figures 4 and 6 (ST-X400) or figures 7 and 9 (ST-X900) DIP switch 1 must be open to enable this universal input. The universal operate / hold input allows remote control with a switchable voltage source. Any voltage, AC or DC, from 5 Volts RMS minimum to 120 Volts RMS maximum applied to TB3 terminals 5 and 6 will put the unit in operate (run) mode after the time delay (if any) specified by R14. Removing the voltage input applied to TB3 terminals 5 and 6 will put the unit in hold (stop) mode after the time delay (if any) specified by R23. See page 22 for setting these time delays. NOTE: If no voltage is applied to this input and DIP switch 1 is open, upon power up, the unit will run until the off delay times out. The unit will then go into hold mode. The contact closure input (TB3 terminals 7 and 8) will NOT function normally with this voltage removed and DIP switch 1 open. The ON time delay (R14) and OFF time delay (R23) functions ONLY apply to the universal operate / hold input. The universal emergency operate / hold function does not use the timers. If the timers are both set for 10 seconds and the operate OR hold command is sent, removed then sent again in less than 10 seconds, the timers will not allow the Smart Trigger to change modes. 23 TS ENGINEERING, INC. Using the universal emergency operate / hold function Contact closure controlled universal emergency operate / hold input See figures 4 and 6 (ST-X400) or figures 7 and 9 (ST-X900) r CONTACT CLOSURE IS A NON-POWERED DRY CONTACT. IF ANY VOLTAGE IS APPLIED TO THE CONTACT CLOSURE INPUTS, SEVERE DAMAGE MAY OCCUR TO UNIT AND WILL VOID THE WARRANTY Connecting a switch across TB3 terminals 11 and 12 will provide the ability to immediately switch between operate and hold conditions remotely. A switch closure will put the unit in hold (stop) mode. Opening the switch will put the unit in operate (run) mode. DIP switch 2 must be closed to enable this universal emergency operate / hold contact closure function without any voltage applied to the universal emergency operate / hold input below. With DIP switch 2 open (to enable the voltage controlled input below), closing this remote switch will force the unit to hold (stop) if the control voltage below is applied. In this condition, removal of the control voltage below has priority and will hold (stop) the output. Opening the remote switch in this case will NOT restart the output until the control voltage below is reapplied. r CONNECTING ANY VOLTAGE ACROSS THE CONTACT CLOSURE EMERGENCY OPERATE / HOLD INPUTS (TB3 terminals 11 and 12) MAY DAMAGE THE CIRCUIT AND VOID YOUR WARRANTY! THIS IS MEANT TO BE A SWITCH, RELAY CONTACT OR OTHER NON-POWERED CLOSURE. Voltage controlled universal emergency operate / hold input See figures 4 and 6 (ST-X400) or figures 7 and 9 (ST-X900) DIP switch 2 must be open to enable this universal emergency input. The universal emergency operate / hold input allows remote control with a switchable voltage source. Any voltage, AC or DC, from 5 Volts RMS minimum to 120 Volts RMS maximum applied to TB3 terminals 9 and 10 will put the unit in operate (run) mode. Removing the voltage input applied to TB3 terminals 9 and 10 will put the unit in hold (stop) mode. NOTE: If no voltage is applied to this input and DIP switch 2 is open, the unit will NOT run. The contact closure input (TB3 terminals 11 and 12) will NOT function normally with this voltage removed and DIP switch 2 open. The ON time delay (R14) and OFF time delay (R23) functions ONLY apply to the universal operate / hold input. The universal emergency operate / hold function does not use the timers. 24 TS ENGINEERING, INC. The +5 volt interlock / status output See figures 4 and 6 (ST-X400) or figures 7 and 9 (ST-X900) Extreme care should be used when connecting to TB3 terminal 4 since this is a direct connection to the micro controller. This output follows the actual operate (run) / hold (stop) modes of the Smart Trigger. In operate (run) mode, this output is +5VDC. In hold (stop) mode, this output is 0VDC with reference to ground at TB3 terminal 3. This output can be used as a status indicator to drive a LED (with a 1K Ohm resistor in series), a high impedance PLC input or other devices with appropriate buffering. The most common use of this interlock signal is to control another Smart Trigger (interlocking). DO NOT DRAW MORE THAN 20 MA FROM THIS OUTPUT. Using the +5 volt interlock / status output To interlock two Smart Triggers in a master / slave configuration, connect the master unit TB3 terminal 4 to the slave unit at TB3 terminal 5 (for an adjustable on / off time delayed slave) and connect the master unit TB3 terminal 3 (ground) to the slave unit TB3 terminal 6. Remove jumpers JMC and JMD on the slave unit. Removing these jumpers will disconnect the slave photo sensor input from the universal operate / hold input. Set the slave DIP switch 1 to “open”. The slave unit will now be controlled by (interlocked to) the master unit. In this configuration, when the master unit is commanded to hold (stop), the slave will hold (stop) after the time delay set with the off delay (R23) on the slave unit. The slave will remain in hold (stop) until the master unit is commanded to operate (run) mode AND the on time delay (R14) on the slave unit has expired. If no delays are needed for slave operation OR if the photo sensor input to the slave unit is also required, the universal emergency operate / hold input to the slave unit can be used for interlocking. To do this, connect the master TB3 terminal 4 to the slave TB3 terminal 9 and the master TB3 terminal 3 (ground) to the slave TB3 terminal 10. Ensure that jumpers JME and JMF are removed and DIP switch 2 on the slave is set to “open”. 25 TS ENGINEERING, INC. Motion sensor cable color coding and wiring details There are two different motion sensors available for the Smart Trigger. They are functionally the same and can be distinguished by the cable color and attached connector as shown below: Part # Description 61-1016-1L Gray cable with threaded DIN connector 61-1016-AB Tan cable with push on DIN connector Units ordered without an enclosure (-OFK models for "Open Frame Kit") are shipped with a 61-1016-AB motion sensor (tan cable and push on DIN). There has been a change in the wire colors in these sensors. To identify the sensor you're working with, look at the DIN connector strain relief near the indexing key. If the word "TOP" and an arrow pointing to the key are found, this is an "Old Cable Color" unit. If the number "00-901-50078" and no arrow are found, this is a "New Cable Color" unit. The motion sensor and its cable/connector assembly are shielded. This shield MUST be connected to the PC board ground for proper operation. If the DIN connector is removed from the motion sensor assembly and the cable is directly connected to the terminal block, the following connections are required: Old Cable Color DIN Function 1 2 3 4 5 Shell +5VDC RED Ground BROWN No connection BLACK Testing only ORANGE Motion signal YELLOW Shield BARE New Cable Color Smart Trigger TB2 location ORANGE BLUE BLACK GREEN WHITE BARE Terminal 1 Terminal 3 NA NA Terminal 2 Terminal 3 If the DIN connector is used with the supplied female chassis connector, a shielded cable MUST be used from the terminal block to the solder connections at the female chassis connector. Please note that the ground and shield connections are jumpered on the supplied female DIN connector. Your shielded cable ground AND shield need connected to pin 2 on the DIN. Please pay special attention to the DIN connector pin out as the pins are not numbered sequentially. The female chassis connector when viewed from the rear solder connections with the key facing up is numbered as follows starting at the key and moving counter clockwise around the connector: 1,4,2,5,3. Ensure that there are no solder bridges between the DIN pins before applying power. Pins 3 and 4 are not used for normal operation. They are used only for calibration and quality control testing of the motion sensor assembly. Any connections to them may cause improper operation or damage to the unit or motion sensor assembly. 26 TS ENGINEERING, INC. Smart Trigger wiring diagrams and terminal details The wiring of the Smart Trigger controller is shown in figure 10 (ST-X400) on page 28 and figure 11 (ST-X900) on page 29. The power connections for the AC input line hot and neutral connections should be of sufficient gauge to handle the current being used by the controller and supplied to the feeder. All PC board connections to the Smart Trigger use a terminal block screw style connection that will accept wire sizes from 12 to 24 AWG. The actual wire size used for customer installation of –OFK models in an enclosure (see page 31) should be a minimum of 14 AWG. The wire gauge used will depend on local electrical codes and regulations. TB2 terminals 1 (+5VDC), 2 (motion sensor signal), and 3 (ground) are for the motion sensor interface connection. This connector is only installed on models with a –M suffix (ST-XX00-M). TB3 terminals 1 (photo sensor power +), 2 (photo sensor signal) and 3 (ground) are for the photo sensor interface connection. This connector is only installed on models with a –P suffix (ST-XX00-P). On ST-X400 models TB2 terminals 4 (set point top), 5 (set point wiper), 6 (set point bottom), 9 (power LED +) and 10 (power LED -) are pre-wired with a 22 gauge five conductor shielded cable. The shield of this cable MUST be connected to the enclosure. The remaining terminals are all for customer connections. On ST-X900 models TB2 terminals 4 (set point top), 5 (set point wiper), 6 (set point bottom and ground) and 7 (power LED +) are pre-wired with a 22 gauge five conductor shielded cable. The shield of this cable MUST be connected to the enclosure. The remaining terminals are all for customer connections. 27 TS ENGINEERING, INC. 7 Blue 6 Neutral 5 Blue 4 N/C 3 120/220 120/220 Brown Output Neutral ** Output Power ** 9 8 Brown 2 Neutral Input Power TB1 (Power) Output 1 10 Gate 120V or 220V Amplitude Pot Input Signal Ground +5v Interlock 4 (+) DC 5 Gnd 6 7 Customer Connections Shown for ST-1400 and ST-2400 Units TB3 (Interface) 8 (+) DC 9 Gnd 10 11 12 Remote Hold - switch (no timers) P/S Input 3 Universal Input (+) DC (no timers) JMG (+) DC volts Remote Hold - switch (timers) 12 - Input 0-20 ma Analog Input (+) Customer Connections 11 + Input 10 2 Universal Input (+) DC (timers) 9 1 Photo-eye Input 8 Ground (Check JMB Jumper) Orange 7 Power On LED Green/White Black Amplitude Pot Sig. Ground Red Motion Sensor 6 5 Amplitude Pot (+) 4 Green 3 Ground Black 2 Sensor Signal +5V Sensor Pwr Red 1 0-5V Analog Input (+) TB2 (Control) Figure 10. ST-1400 / ST-2400 Circuit board wiring diagram and terminal reference 28 TS ENGINEERING, INC. 7 Blue 6 Neutral 5 Blue 4 N/C 3 120/220 120/220 Brown Output Neutral ** Output Power ** 9 8 Brown 2 Neutral Input Power TB1 (Power) Output 1 10 Gate 120V or 220V TB2 (Control) Amplitude Pot TB2 0-20 ma Analog Input (+) Ground (Check JMB Jumper) Orange (+) DC volts Input Signal Ground 3 +5v Interlock 4 (+) DC 5 Gnd 6 7 JMG Customer Connections Shown for ST-1900 and ST-2900 Units TB3 (Interface) 8 (+) DC 9 Gnd 10 11 12 Remote Hold - switch (no timers) 10 Customer Connections Remote Hold - switch (timers) Universal Input (+) DC (no timers) 9 2 Universal Input (+) DC (timers) 8 1 Photo-eye Input 7 Power On LED Green/White Black Amplitude Pot Sig. Ground Red Amplitude Pot (+) Motion Sensor 6 0-5V Analog Input (+) 5 4 Green 3 Ground Black 2 Sensor Signal +5V Sensor Pwr Red 1 Figure 11. ST-1900 / ST-2900 Circuit board wiring diagram and terminal reference 29 TS ENGINEERING, INC. Troubleshooting guide Problem Possible causes Dead Smart Trigger Is Smart Trigger fuse bad? Replace it. Is AC power input cable unplugged? Plug it in / try another outlet. Is Smart Trigger power switch off? Turn it on. Is AC power outlet dead? Power mains need repair. Power indicator on Is vibration intensity set point control at minimum? Raise set point. but no output power Are feeder coils bad, broken wiring or not connected? Check / repair. If DIP sw 1 is open, is AC or DC voltage present at TB3 pins 5 and 6? If it is > 5 volts and < 120 volts, is TB3 pin 7 grounded by a switch? If DIP sw 2 is open, is AC or DC voltage present at TB3 pins 9 and 10? If it is > 5 volts and < 120 volts, is TB3 pin 7 grounded by a switch? Intermittent / erratic In closed loop mode (WITH a motion sensor), ensure that sensor cable changes in output is not near or coiled near AC input or output lines. Is the motion sensor cable shield grounded? (See page 26). Make sure there are no ground loops. (Use a single common ground point for ALL feeder controls and AC input power mains). In open loop mode (WITHOUT a motion sensor) Make sure there are no ground loops. (Use a single common ground point for ALL feeder controls and AC input power mains). Unit runs briefly after power up, then stops If DIP sw 1 is open, check for missing operate / hold input voltage at TB3 pins 5 and 6. If DIP sw 1 is closed, check for a closed switch at TB3 pins 7 and 8. (See page 23). 30 TS ENGINEERING, INC. Model number information EXAMPLE: ST-XY00-M-P-ABC Key Description X 1 = Unit is 110VAC input. 2 = Unit is 220VAC input. Y 4 = Unit is a 1400 / 2400 model. 9 = Unit is a 1900 / 2900 model. M Unit has a motion sensor input connector. (See page 26) 1 = +5VDC (red) from TB2-1 2 = Ground (green) from TB2-3 3 = No connection 4 = No connection 5 = Motion sensor signal (black) from TB2-2 P Unit has a photo sensor input connector. 1 = +24VDC (brown) from TB3-1 2 = No connection 3 = Ground (blue) from TB3-3 4 = Photo sensor signal (black) from TB3-2 ABC STD = Unit has a 110VAC female grounded output connector. HW = Unit has a hard wired 6 foot output cable. Brown = Hot from TB1-8 Blue = Neutral from TB1-7 Green / Yellow = Ground from AC line input and enclosure ground HC = Unit has a Harding (locking) output connector. 1 = Hot (brown) from TB1-8 2 = Neutral (blue) from TB1-7 3 = No connection Ground = Ground from AC line input and enclosure ground OFK = Unit is an Open Frame Kit. PC board and heat sink are attached to a mounting plate with the set point control, knob and power LED shipped loose for installation in the end users enclosure. 31









© Copyright 2026