
Analysis of a Nonlinear Control System for Stabilizing a Missile
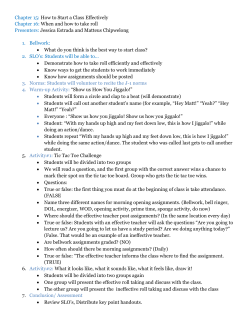
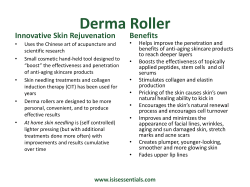
TAANSACTIONS IRE AUTOMATIC ON COATTROL 8 Novena ber Analysis of aNonlinearControl System for Stabilizing a Missile" LEONARD ATRANT Summary-An autopilot with attitude and rate feedback, representativesystem lags, and a two-way relay servo with inherent hysteresis is considered for roll control of a missile with peripheral, tangentially operating jets. This type of control system is shown to produce a steady-state oscillation. Missile dynamics in the presence of hunting are developed and the relationships governing angular position and rates are found to be functions of the oscillation frequency, control force magnitude, and missile constants (geometry and weight). The describing function techniqueis utilized to determinegraphically the relationship among frequency, hysteresis band, and system time delays. A comparison is made between the root locus and amplitude-phase presentation. An analog computer study of system behavior is presented to illustrate the agreementbetween the analysis and systemperformance. INTRODUCTION N E of the foremost considerations in the design Fig. 1-3lissile coordinate system. of a missile control system is that itbe a s simple and inexpensive as possible. This can be achieved b y using only those components which are absolutely necessarytoperformthecontroltaskadequately. L (summation of roll moments). (1) Gyros, resolvers, amplifiers, filter networks relays, and actuator hardware should be kept to a minimum. Because of symmetry, we may assume This paper shall restrict itself to the discussion of I, I , and I,, 0. roll stabilization by means of a relatively simple and reliable autopilot system designed to provide attitude Eq. in simplified form becomes: control,whereasthe missile maneuvercommandsin this case are applied to the pitch and yaw channels. Although in aircraft operation almost any continuous oscillation is intolerable, in an unmanned missile i t is where lj Lj/Ir (control moment effectiveness), possible t h a t a steady-state oscillationconfined to I , =L,/I, (misalignment torque factor), reasonablelimitsisentirelysatisfactory.Thecontrol fj force produced by control jets, system under discussion consists in partof a relay servo f,=net unbalanced force due to possible thrust misdriving a jet nozzle valve in such a manner as to proalignment, duce a continuous dither. The nozzles themselves are L j control force moment arm, located on the periphery of a plane normal to the main L, =effective moment arm upon which unbalanced thrust line. Control of the jets results in a fixed torque forces act. in either of opposite directions. W i t h no unbalanced torques acting on the system, The autopilotsignal requiredt o roll stabilize is derived from an attitude gyro; however, a derivative signal is fm = O ; therefore, upon integrating ( l ) , we arrive at the necessary to augment the negligible aerodynamic damp- following expression for roll rate: ing of the missile. P Ijjj[t switching] C$ (missile roll rate). (3) 0 EIISSILE ROLLD n x m c s During any "on-time" Let us assume a general missile configurationas shown fj k F (pounds) constant. in Fig. 1. n/w T h e roll moment equation, taken about the body axis Theon-time foreachunidirectionalblastis where is the frequency of oscillation in rad/sec. T he is peak roll rate is, therefore: Manuscript received by the PG.IC, September 9, 1956. Presented a t WESCON, Los Angeles, Calif., August, 1956. t Air Arm Div., IVestinghouse Electric Corp., Baltimore, Md. Authorized licensd use limted to: IE Xplore. Downlade on May 10,2 at 18:57 UTC from IE Xplore. Restricon aply. 90ZjF @mal w (deg.:'sec). 1357 Atran: Analysis ofNonlinear a Control System for Stabilizing Missile a Fig. 4-Relay servo controlling missile in roll (externally applied torque of 49 pounds-feet). (b) Fig. 2-(a) Waveforms of force and acceleration. (b) Waveforms roll position and rate. SERVOSYSTEM Theinput-outputwaveformsoftherelay-actuator combination are illustrated in Fig. 5 , next page. The autopilot control system is shown in block diagram form in Fig. 6. In an effort to determine the behavior of the system in the presence of a highly nonlinear servo, the system transfer functions are combined and the characteristic equation rearranged to thefollowing expression for neutral stability:’ -1 N(x) Fig. 3-Plot of maximum roll angle and roll rate vs frequency of acceleration. 1) IjB(71S syns (73s (6) where A/B. Thedescribingfunction N ( x ) has beenderivedin the Appendix; in addition, both sides of (6) are plotted inFig. 7. T h e crossover point of the describing functioncurveandsystemtransferfunctiondetermines boththefrequencyandamplitude of theresultant steady-state oscillation. AUTOPILOT PARAMETERS Further integration leads to the following expression for the peak roll angle: I th a s beenshown thatforthenonlinearsystem under discussion the magnitude of t h e roll angle excursions isa function of the control force and the frequency of oscillation. In turn, the frequencyis a function of the hysteresis band, system time lags, and autopilot gain. The interrelation will now be explored. A steady-statetorqueunbalance,dueinpart to a misalignment of the thrust axis, will compel t h e missile to assume a steady-state angular error. However, the system will continue to oscillate in accordance with t h e Thewaveforms of thesystemundersteady-state conditions are illustrated in Fig. 2 (a) and 2 (b) Plots of and dmaxvs modefrequencyareshown in Fig. 3 for values of l j -0.58 and F = 100 pounds. Superposition of an unbalanced torque requires the development of a counter moment of the same average value, thereby necessitating that the symmetry of the E. C. Johnson, “Sinusoidal analysis of feedback control systems control force vs time curve be destroyed. This is illuscontaining nonlinear elements,” Trans. A I E E , vol. 71, part 2, pp. trated in the REAC recordings of Fig. 4. 169-181 July, 1952. Authorized licensd use limted to: IE Xplore. Downlade on May 10,2 at 18:57 UTC from IE Xplore. Restricon aply. TRANSACTIONS IRE Fig. 5-Control November ON A U T O M A T I C CONTROL system waveforms. Ii Fig. 6-Control system block diagram. requirements imposed by( 6 ) , and thebias from its original zero steady-stateroll angle may be determined in the following manner. Assume for the moment that roll the oscillation caused by system nonlinearity is sufficientlyremoved in frequency from the actual roll controlmodecornerfrequency for complete decoupling to exist. That is, the response to a roll command input is not influenced by the higher frequency dither. Under these conditions we may write that $=O Fig. i--.lmplitude and phase of servo describing function and system transfer function. F=- Lmj7n (pounds). Lj T h e roll mode,regarded as linear and Aljs -Blj 0, has a damping factor of the form and average fjse Substituting the above into (2) we have: L, LiB (rad). where wn d--Blj. Thus for a specified the value of A that is necesThus if the maximum allowable roll angle is specified sary is together with the magnitude of the unbalanced torques likely tobeencountered,therequiredautopilotgain A4=-.2i-nwn becomes lj B E - Lmfm (pounds/rad). L&AV T o counterbalance the moment Lmfmrequires a force capability of Authorized licensd use limted to: IE Xplore. Downlade on May 10,2 at 18:57 UTC from IE Xplore. Restricon aply. DISCUSSION A missile controlsystemwasselectedforanalysis and the following values were assigned to the various parameters. of a Nonlinear Control System for Stabilizing Atran: Analysis I957 Missile 5 0 J 0 I Fig. 9-Relay -5 Fig. 8-Root locus plot of representativecontrolsystem showing effect of nonlinearity. -4=linear system, B =nonlinear system. 72=0.05 sec, F=lOlt. lj 0.58 1 pound sec2 F A 42 pounds/rad/sec, B 420 pounds/rad, r2 0, 0.05, 0.1 second, 73 0.01 second for r 2 h 100 pounds, 0.05, 0.1F, 0.5F. Time lags 7 2 and 7 3 were considered as representative delays for this type system. Autopilotand missile characteristics, as illustrated by Figs. 7-9, result in thefollowing observations. T o limit the amplitudeof the roll angle oscillation t o 3 . 5 O requires the missile t o oscillate at approximately 5.5 cps. Thus an autopilot lag of 0.05 second and a hysteresis/force ratio of 0.1 will satisfy this condition. An increase in either time delay or hysteresis results in a lowering of the natural frequency and a consequent increase in the signal amplitude level, a factor of importance for a system operating close to saturation. The root locusplot,2 while providing the requisite W. R. Evans, “Graphical analysis of control systems,” Trans. AIEE, vol. 67, p. 85; January, 1948. Authorized licensd use limted to: IE Xplore. Downlade on May 10,2 at 18:57 UTC from IE Xplore. Restricon aply. servo controlling missile in roll. stability information, proves to be somewhat more difficulttoconstructas a result of thisparticularnonlinearity. The actual procedure consisted of obtaining a family of loci for a series of describing function phase angles,thenplotting oneach“phase”locusthegain corresponding tothe describingfunctionamplitude. T o analyzethe effects of additionallagsdemands a complete new family of loci, whereastheamplitudephase presentation requires but a modified plot of the system transfer function. A computer(REAC)studyresultedinreasonable agreementbetweentheanalysisandactualsystem performance,thefrequencyandamplitudechecking t o within 10 per cent thereby justifying the assumption regarding the filteringof higher harmonics. For example,inFigs. 7 and 8, a resonantpoint exists a t 36 rad/sec when 0.05 sec and F = 1Oh for the system under discussion.Fig. 9 illustrates the results of a REAC study with agreement as to frequency of oscillation; the theoretical amplitudes may be found in Fig. 3. CONCLUSIOS 1) Unbalancedtorquesshouldbeminimized duce the control force. t o re- 2) The frequencyof the roll oscillation must be maintained at a reasonably high value so as to restrict the magnitude of the roll oscillation and to reduce coupling with the roll control mode. 3 ) Hysteresisandtimelagsdueto nonidealcomponents must be minimized within the autopilot in order for the system t o achieve the necessary resonant frequency. 4) T h e describing function technique may be readily employed as an analytic toolin the study of a missile autopilot system having a relay servo. Nouember IRE TRANSACTIORTS ON A U T O M A T I C C O N T R O L APPENDIX DERIVATION OF THE and DESCRIBISG FUNCTION -1 Considering the waveform t o be a periodic odd function, with the period divided equally, the time function in terms of a Fourier series is f(t) an sin n ( w t x 4-412 B12 !a p a) Cpon substituting for A1 and B1, we arrive at the required relationship t h a t where 2F (1 cos nn) From (9) we have that one term of f(t) is: A, B, sin m t nut where An= B, a, sin m ~ . ncy. a,, Consider initially the effects of harmonics that areof a higher order than the fundamental as being negligible; i e . , n 1 only. Substitutinginto (10) wefind t h a t 4F a1 T and 4F A1 a sin 4F B1 a However, from Fig. 5, sin k GLOSSARY Roman Symbols A =roll rate gain (pounds/rad/sec). AI, A , Fourier coefficients. al, a, Fourier coefficients. B =roll attitude gain (pounds/rad). F , f=control force (pounds). h =hysteresis (pounds). I,, Iu,I,, I,, =moments and product of inertia(slug feet2). =jet control subscript, alsod-1. L =roll moment (pound -feet). N ( x ) servodescribing function. n =integer of harmonic. P roll rate (rad/sec). Q pitch rate (rad/sec). R =yaw rate (rad/sec) =Laplace operator. =real time (sec). X=amplitude of servoinput signal, rollaxis of missile. Y = missile pitch axis. missile yaw axis. Greek Symbols and phase lag. phase angle (deg). T =system time delay (sec). roll angle (rad). =radian frequency (rad/sec) =damping factor (nondimensional). a A1 4Fh TX B1 4F49 The describing function is h2 ACKXOWLEDGMENT The author wishes to acknowledge theencouragement and advice provided byA. M. Fuchs now of CDC Control Services, Inc. Authorized licensd use limted to: IE Xplore. Downlade on May 10,2 at 18:57 UTC from IE Xplore. Restricon aply.








© Copyright 2026