
PID Based on Attractive Ellipsoid Method for Dynamic Uncertain and
PID Based on Attractive Ellipsoid Method
for Dynamic Uncertain and External
Disturbances Rejection in Mechanical
Systems
P. Ordaz1,2 , E. S. Espinoza2 , A. Garc´ıa1 and J. Ramos2
∗
Abstract
This paper presents a stability analysis for LNDS (Lagrangian Nonlinear Dynamical
Systems) with dynamic uncertain using a PID controller with external disturbances rejection based on attractive ellipsoid method. Since, the PID-CT (Proportional Integral
Derivative Computed Torque) compensator has been used for the nonlinear trajectory
tracking of a LNDS, when there are external perturbations and system uncertainties.
It has not been proved the global system convergence of the trivial solution. In this
sense, we propose an approach to find the gains of the nonlinear PID-CT controller
to guarantee the boundedness of the trivial solution by means of the concept of the
UUB (Uniform-Ultimately Bounded) stability. In order to show the effectiveness of
the methodology proposed, we applied it in a real 2-DoF robot system.
1
Introduction
The mathematical model for many physical (mechanical and electrical) systems
is described by a set of nonlinear ordinary differential equations. Commonly,
these mathematical models are described by a trajectory optimization procedure or by Lagrangian (Euler-Lagrange) dynamic equations [1, 2]. The main
control problem for these systems involve some concepts of stability such has
asymptotic, exponential and uniform stability, among many others (see for example [3, 4, 5]). Moreover, the high precision position and velocity control
in Lagrangian systems are a fundamental, and important control problem. In
practice, the problem of tracking a reference trajectory where external disturbances, parameter uncertainties, or dynamical uncertainties are present, has
received relatively less attention in the literature. Traditionally, the methods to
∗1 Research
Center on Technology of Information and Systems (CITIS) of Autonomous
University of Hidalgo State, M´
exico.
2 The Robotics and Advanced Electronics Research Laboratory, Polytechnic University of
Pachuca, Hidalgo, M´
exico.
e-mail: {patricio,steed,jramos}@upp.edu.mx, abel [email protected]
1
1 Introduction
2
stabilize the Lagrangian systems are based on conventional PD (Proportional
Derivative), PD+ (PD with gravity compensation), PID (Proportional Integral
Derivative) and PID-CT compensators. It is well known that a PD controller
can guarantee only asymptotic stability of Lagrangian systems in the regulation
case. For the control theory viewpoint, it is well known that the steady-state error can be dissipated by introducing an integral compensator to the PD control
or PID compensator. Nevertheless, in order to remove steady-state error caused
by external disturbances, uncertainties, and noise, the integrator gain has to be
increased. Nowadays, in industrial applications are still used industrial linear
PID’s, however under certain circumstances, the stability of the closed-loop
system with traditional PID is not guaranteed (from theoretical viewpoint).
Thus, a high number of authors have been studying the global asymptotic stability around the origin of conventional compensators using the LNDS and the
LaSalle’s invariant principle theorem [3, 4, 6, 7]. However, when the LNDS has
unknown bounded external perturbations, the traditional analysis does not has
a good efficiency. Besides, the transient performance and stability problems in
the integrator theory analysis are also difficult to deal with for industrial linear
PID controller. In order to ensure asymptotic stability of the PID controller, a
traditional method is to modify the linear PID into a nonlinear one.
Nonetheless, it is well known that in many theoretical and practical applications the PID compensator, under satisfactory gain tuning, provides a workable
trajectory enforcement. Moreover, from a certain point of view, the PID compensator, without full system description, achieves some robustness properties
[6, 8, 9, 10]. Based on the above assumptions and after an exhaustive research
in the area of classical closed-loop controllers for LNDS we are inevitability
addressed to the next question; under which conditions the classical PID is
workable? Unfortunately, this is an open question because the classical PID
compensator in presence of strong nonlinearities (like LNDS, tribology effects,
external perturbations or dynamic uncertainties) involves difficulties in dynamical analysis (see for example [11, 12]). Even more, the qualitative operation of
PID closed-loop solution of LNDS plays an important role in many engineering
practical applications such as mechanical and power systems [7, 12, 13]. Although for the classical linear PID, it is easy to prove asymptotic stability [11],
it is not the case for the nonlinear system (this is the case for control analysis of
LNDS or the Geometrical viewpoint (see [14] chapters 10 - 11 and [15])). So, in
[14, 15] the authors established exponential stability only for the velocity error
and feedforward compensator for LNDS, but this analysis doesn’t tell us what
happend with the external perturbations. In this work, we intend to define UUB
stability (for all system states) on the class of perturbed LNDS. Although, PID
control has been used in industrial robots for a long time, there is few explicit
stability analysis on it. A wide variety of authors ensure asymptotic stability,
but they do not take into account a robust analysis.
Nowadays, the development of high-performance robust control as well as its
physical implementation are some one of the main problems in the control theory, because in the experimental applications, we require a workable instrument
to design compensators, which are able to operate successfully under consider-
2 Basic definitions and problem formulation
3
ation of external perturbations (see e.g. [16, 17, 18]). This paper deals with
the trajectory tracking control problem for LNDS, applied for a two Degree of
Freedom (DoF) benchmark robotic manipulator. Here, we consider the PID-CT
for LNDS with unknown but bounded external perturbations. This kind of perturbation belongs to the class of nonlinear functions so called Quasi-Lipschitz
functions. These class of functions permits to consider strong nonlinearities, like
tribology effects, and relay effects (such as the case when a robot task is to take
an object from one point to another, which induces a switch on the parameters,
for example, mass and length to the center of mass). Even more, we suggest
a robust analysis for a class of LNDS with bounded disturbances. Thus, in
this paper we give an analysis of UUB stability for LNDS with unknown but
bounded external perturbations from a class of Quasi-Lipschitz functions.
The outline of this paper is as follows; In the section II, we present a basic definitions and the problem formulation. Next section presents the main
contribution of this work, based on the robust analysis of PID-CT compensator for Lagrangian systems. In the section IV, we obtain a numerical results
which defines a two-link manipulator trajectory track. Finally, we present the
conclusions.
2
Basic definitions and problem formulation
In this section, we introduce the mathematical and LNDS mechanical tools
needed for the remainder of this work.
2.1
Lagrangian dynamics
Lagrangian classical model: The dynamic equation for mechanical or electrical systems can be obtained via the Newton’s or Kirchhoff’s laws approach, for
N -DoF system, or like in this case, from the Lagrangian. These equations are
obtained by the Lagrangian equation (for mechanical viewpoint). The general
equation obtained from Lagrangian mechanics as:
D(q)¨
q + C(q, q)
˙ q˙ + G(q) = τ
(1)
where the position coordinates q ∈ Rn with their associated velocities q,
˙ and
accelerations q¨ are controlled by the vector τ ∈ Rn of driving forces. The
Coriolis (centripetal) forces are C(q, q)
˙ q˙ ∈ Rn , and the gravitational forces are
n
denoted by G(q) ∈ R . The dynamics (1) presents some interesting properties
which will be useful in establishing the stability control analysis (see appendix).
Lagrangian equations in first ODE form: Observe that the general
Lagrangian equation (1) can be represented in the first order extended system
as follows:
x˙ = f0 (x) + g(x)u
(2)
x(0) = x0
where x ∈ M ⊆ R2n , u ∈ Rm is the control input, and x0 ⊆ M are the
initial conditions. From Lagrangian formulation under basic change of variables
2 Basic definitions and problem formulation
4
|
x1 := q ∈ Rn , x2 := q˙ ∈ Rn , u := τ ∈ Rn , and x = x|1 , x|2 , one has the
mathematical model as:
h
i
h
i
x2
0n×n
f0 (x) = −D−1 (x1 ){C(x)x2 +G(x1 )} , g(x) = D−1
(3)
(x1 )
The uncertain external perturbation: The external perturbations, affecting the system dynamics, are supposed to be bounded. By including this
expression on the LNDS, we have:
D(x1 )x˙ 2 + C(x)x2 + G(x1 ) = τ + ζ(x, t)
(4)
where the external perturbations have the following property:
ζ(x, t) := ζ(q, q,
˙ t), kζ(x, t)k2 ≤ c1 + c2 kxk2
for positive scalars 0 < c1 , c2 < ∞. Even more, it is admitted to have an
unknown nonlinearity from a given class so-called, quasi-Lipschitz functions [19].
Then, the nonlinearities ζ : Rn → Rn are from the C class of quasi-Lipschitz
functions.
Definition 1 (the class C of quasi-Lipschitz functions [19]): A vector function f1 :
Rp → Rp is said to be from the class C (A, σ1 , σ2 ) (A ∈ Rp×p ; σ1 , σ2 ≥ 0) of
quasi-Lipschitz-functions if for any z ∈ Rp , it satisfies the inequality
p
C(A, σ1, σ2):= {f1 : Ro
−→Rp |
2
2
kf1 (z, t)-Azk ≤ σ1 +σ2 kzk 0 < δ1 , δ2 < ∞
(5)
Notice that
• the growth rate of f1 (z, t) as kzk → ∞ is not faster than linear;
• if σ1 = 0, the class C (A, 0, σ2 ) is the class of Lipschitz functions.
This class of nonlinear functions may include discontinuous and hysteresis functions as well. Here, the perturbation ζ(x, t) under dynamics x˙ 2 has the following
property:
f1 (x, t) := D−1 (x1 )ζ(x, t)
(6)
D−1 (x) ≤ δ1 In×n
which implies that f1 (x, t) ≤ δ1 c1 + δ1 c2 kxk2 . The scalar, δ1 , is given by the
bounded property of the inertia matrix (see appendix). Finally, the Lagrangian
equations in Cauchy form (2) in presence of external perturbations (4) have the
following form:
x˙ = f0 (x) + f1 (x, t) + g(x)u
(7)
In this work, we allow the external perturbations f1 (·) from a C class of quasiLipschitz functions. Now, our control objective is to stabilize (7) by using the
PID-CT compensator.
3 On the UUB-stability of the PID-CT for LNDS
5
PID-CT configuration: In this work, the structure of the proposed control
action τ is as follows
u = D(x1 )x˙ d2 + C(x)xd2 + G(x1 )
−KI ξ(˜
x1 ) − KP x
˜1 − KD x
˜2
(8)
with the gain matrices 0 < KI = K|I , KD = K|D , KP = K|P ∈ Rn×n and
x
˜1 := x1 −xd1 , x
˜2 := x2 −xd2 as dynamics error, where
xd1 and xd2 are the deviation
R|
position and velocity, respectively, and ξ(·) := t0 (·)dτ . In the classical robotics
control strategies, the control action (8) is known as PID-CT compensator and
it is well known that it has robustness properties.
2.2
Problem formulation
In this section, we explain the problem formulation, which states that all system
trajectories arrives to a neighborhood of a desired trajectory. This is by the
following facts; When the system contains noise on the state measurements (for
example where the velocity and acceleration are estimated, by definition, from
position measurement). Possible change or switch in the system parameters, the
time varying or like relay change on the parameters. External disturbances, the
link contact with the external environment. Dynamic uncertainties, Maxwellslip friction model, Stribeck effect in sliding, frictional lag, varying break-away
forces, stick-slip behavior, among others tribology effects. For this reason, in
this work, we approximate the error tracking path of the nonlinear system (7)
to an AE (Attractive Ellipsoid).
Definition 2 (Attractive ellipsoid): We say that the ellipsoid
E (0, P) = {x ∈ Rn : x| Px ≤ 1, P = P| > 0}
(with the center in the origin and with the corresponding ellipsoidal matrix P)
is attractive for some dynamic system if for any of its trajectories {x}t≥0 the
following property holds:
lim sup x| (t) Px (t) ≤ 1
t→∞
Remark that all trajectories {x}t≥0 of a dynamic system remains bounded, if
for this system there exists an attractive ellipsoid E (0, P). The existence of an
AE is the generalization of the UUB-property (uniform-ultimately boundedness)
discussed in [5]. Our main goal is to design a robust feedback based on PID
compensator, moreover, the compensator rejects disturbances without loss of
tracking trajectories paths.
3
On the UUB-stability of the PID-CT for LNDS
The robustness of the PID compensators on dynamical systems is a classical
topic in control theory. Here, we present a stability sketch from LNDS in closedloop with PID-CT. It is well known that the kinetic energy plays an important
3 On the UUB-stability of the PID-CT for LNDS
6
roll for stability analysis for LNDS. In this paper, we use the energy function
based on kinetic energy as follows:
|
(9)
x1 )| , x
˜|1 , x
˜|2
V (y) = hy, Pyi, y := ξ(˜
where the matrix P = P| ∈ R3n×3n is a positive definite matrix and its structure
is defined by n × n matrix sub-blocks as follows:
P
P12 0n×n
11
|
P
0
P
22
n×n
, where P11 , P12 , P22 ∈ Rn×n
P :=
12
0n×n 0n×n D(x1 )
The following theorem presents the analysis for global stability of the PID-CT
of system (7) under the specific energetic function (9).
Theorem 3 (On the energy function of the PID-CT): If the tuning of the control
gain matrices KP , KD , KI of the control action (8), under given matrix P and
positive scalars α, ε, is such that the following LMI constraint holds
αP11 −εc1 In×n αP12 +P|
P12 −K|
11
I
|
|
|
|
−K
P
+P
αP
+P
+P
αP
(10)
0≤
11
22
12
22
12
12
P
P|
12 −KI
P22 −KP
αA−KD
then, the energy function (9) has the following property:
¯ ≤1
lim hy, Pyi
t→∞
¯ := α
P
β
P11 P12 0n×n
P22 0n×n
P|
12
0n×n 0n×n A
(11)
, β := εc0 ,
The proof of all statements are given on the appendix.
Remark 1: From the Schur’s complement is easy to see that a necessary condition for the linear matrix inequality solution (10) provides positive definite
matrix P for some P12 + P12 < −αP22 , P11 < εcα1 and αA < KD .
Notice that the extended trajectories y(t) converges to an invariant ellipsoid
¯ centered on the origin with elipsoidal matrix P.
¯ In other words, y (t) →
E(0, P)
¯
E 0, P as t → ∞. This ellipsoid is approached with the exponential rate
exp (−αt), and fulfilling with:
ε ¯
y(t), Py(t)
− 1 ≤ V (0) − c0 exp (−αt)
(12)
α
Moreover, notice that the selection of matrix P implies a family of possible
ellipsoidal matrix configuration and may be selected in order to minimize the
energy function (9). In further works, we will study this case from an optimization point of view [19].
Remark 2: It is well-known that the concept of an energetic function was rigorously formalized by means of the Lyapunov stability theory as well as the
notion of a positive invariant set. Here, we just notice that the set of solution
(KP , KD , KI , W) given by Theorem 3, such that (11) holds, the storage function (9) is not obligatory monotonically nonincreasing. That means, V (z) is not
a Lyapunov function for the considered system at least for this time-interval.
4 Experimental validation
7
Below, we suggest the construction of a Lyapunov-Like function whose derivative
on the trajectories of the considered controlled system is strictly negative outside
of an ellipsoid. Which implies that for any trajectory started out from the
ellipsoid (11) arrives to this one. In other words, the UUB-stability is guarantee
if the ellipsoid takes place as attractive region. The above is set to the next
result.
Theorem 4 (On the attractively of the ellipsoid): Under the assumption of Theorem 3, the function
"
r # !2
n
p
β
y≥0
V (y) −
, [¯
y ]+ := y0 if
G (V (y)) :=
if y<0
α
+
is a Lyapunov function, then the following property
d
G (V (y)) ≤ 0
(13)
dt
is globally satisfied, which exactly means that the set y ∈ R3n : G (V (y)) = 0
is a positive invariant region.
Notice that the results of Theorem 4 involve the so called UUB-property on the
solution of the system trajectories (see [5]), satisfying the problem statement
(11), so we may conclude that the PID-CT compensator, for a nonlinear system
(7), is robust under external perturbations.
4
Experimental validation
In order to show the contribution of the results obtained in this paper, we obtain the PID-CT gain matrices under two approaches. The first one is given
by classical Ziegler-Nichols method (popular technique for tuning controllers
that use PID actions [11, 12]), while the second one is given by LMI solution
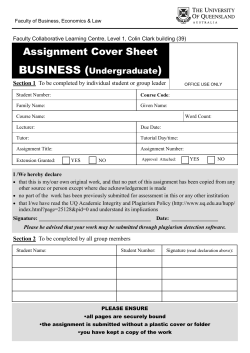
(10) introduced in this paper (see Theorem 3). The system to be controlled is
a benchmark classical system (the second-link vertical planar robot shown in
Fig. 1, whose dynamics are given in the literature, see [7]). The model of the
motion dynamics is a set of 2 rigid bodies connected and described by a set
of generalized coordinates q ∈ R2 . The derivation of the motion equations is
given by (1), and by applying the methods of the Lagrange theory, involving explicit expressions of kinetic energy and potential energy, where we obtained the
standard general equation (1). For this robot study case the position, velocity,
acceleration and control input (q, q,
˙ q¨ and τ respectively) belongs in R2 . Under
variable coordinate change (q1 , q2 , q˙1 , q˙2 ) := (x|1 , x|2 ) = x| , x|1 = (x1,1 , x1,2 ),
x|2 = (x2,1 , x2,2 ) then the nonlinear system, described by first order Cauchy
form (2), with the format (4) as follows:
θ +θ2 +θ3 cos(x1,2 ) θ2 +θ3 cos(x1,2 )
D(x1 ) = 1θ2 +θ
)
θ2
3 cos(x1,2
x2,2 x2,1 +x2,2
C(x) = −θ3 sin(x1,2 ) x2,1
(14)
0
θ4 g cos(x1,1 )+θ5 g cos(x1,1 +x1,2 )
u1
G(x1 ) =
, u = ( u2 )
θ5 g cos(x1,1 +x1,2 )
4 Experimental validation
8
Now the parameters of this manipulator (given in the International System
y
l2, m2
l1 , m1
q2
q1
x
g
Fig. 1: 2-DOF manipulator system.
2
2
of Units) are; θ1 = m1 lc1
+ m2 l12 + I1 , θ2 = m2 lc2
+ I2 , θ3 = m2 l1 lc2 , θ4 =
m1 lc1 + m2 l1 , θ5 = m2 lc2 , with the total mass of link-1 m1 = 0.5kg, the total
mass of link-2 m2 = 0.25kg, the moment of inertia of link-1 I1 = 0.004Kg · m2 ,
the moment of inertia of link-2 I2 = 0.005Kg · m2 , the distance to center of mass
of link-1 lc1 = 0.275m, the distance to center of mass of link-2 lc2 = 0.1m, the
length of link-1 l1 = 0.4m, the length of link-2 l2 = 0.2m and the acceleration
of gravity constant g = 9.81m/seg 2 . The distance to center of mass is defined
by lc1 and lc2 , respectively. Here, we consider that the dynamics are given by:
D(x1 ) + C(x)x2 + G(x1 ) + Fr (x) = τ + ξ(t)
(15)
where the friction vector forces includes a low1 Coulomb and Viscose friction,
Fr (x) ∈ Rn . The initial condition and the control objective are the same that
we present in the previous control shape. Notice that the dissipative vector
forces Fr (x) belongs on the class of quasi-Lipschitz functions, see Definition 1.
For the external disturbances rejection, we introduce a disturbance at time t =
10 seconds. The perturbation structure is as follows:
|
κ(t) = [−0.3χt , −0.3χt ]
χt := 1(t − tP1 ) − 1(t − tP2 )
(16)
where the function u(t − tk ) is the characteristic function at time tk [20]. This
considered disturbance is because, from the experimental point of view, it introduces a significant deviation than the switched parameter value. For example,
the change of some link mass which implies a change on the center of mass
1
The term low friction is defined when the friction coefficients belongs in the set (0, 1).
4 Experimental validation
9
of each link. Then, the LNDS with dissipative forces (15) can be rewrite as
the perturbed form (7). Here f1 (x, t) belongs in the quasi-Lipscitz nonlinear
functions (5), with:
ζ(x, t) = κ(t) − Fr (x)
and the constants δ1 = 0.023 and δ2 = 0.26. The control process is given
by regulation of the desired reference, this one is given by the Heaviside step
function given by the follows equation:
H(t) := 10 ifif t≥0
t<0
moreover, for the control point of view, we implement a regulation point-topont at the Work-Space. The first point to go is at Px1 = 0.34 and Py1 = 0.3
meters at time interval t ∈ [0, tP1 ) seconds, the second follows a trajectory
Px2 = 0.3 + .04 cos(ωt), Py2 = 0.3 + .04 sin(ωt) with ω = 4π for time interval
t ∈ [tP1 , 50), Px3 = 0.3, respectively, and in the time t = 25 seconds, we induce
an external perturbation ξ(t) with a duration of 0.5 s. The initial conditions of
the system for both control examples are:
i|
h π π
x0 = − , , 0, 0
2 4
The gain matrices given by method of Zingler-Nichols2 are:
0
28.76 0
10.98 0
KP = ( 24.56
0 32.77 ) , KD = ( 0 29.07 ) , KI = ( 0 14.76 )
In order to obtain the PID-CT gain matrices, we used the MATLAB Toolbox SeDuMi to solve the corresponding constrained LMI problem (10), see for
example [21]. Finally, we obtain the Gain Matrices as follow:
2.34
34.63 3.3
KP = 1.5 × ( 39.56
2.34 28.37 ) , KD = 2 × ( 3.3 43.71 )
0.1
KI = 2 × ( 1.97
0.1 1.96 )
Fig. 2 depicts the evolution of steady-state errors x
˜. Fig. 4 depicts the
control signals τ1 and τ2 for both actuators. Finally, Fig. 3 shows how after the
induced perturbation the conventional linear PID (red solid line) can’t reject
the perturbation, while in the other hand, for the case where the gains were
tuned by the proposed methodology (blue solid line), the controller is able to
reject the perturbation and to track the desired trajectory.3
Clearly, the robust PID control can successfully compensate the uncertainties
such as friction, gravity and other uncertainties of the robot.
2 To obtain the control gain via Zingler-Nichols, method we take into account the linearization of the first order mathematical model (2) around the center of the area of the desired
trajectory tracking.
3 In the figures Fig. 2-4 the color represent the Z-N Algorithm and the Robust Algorithm presented here.
5 Concluding remarks
10
0.2
0
0
−0.5
Perturbation
response
Switch
(Regulation−Tracking)
−1.5
0
20
40
Ti me [ se c ]
x
˜ 1 , 2 [ rad]
x
˜ 1 , 1 [ rad]
0.5
−1
1
Switch
(Regulation−Tracking)
Perturbation
response
0.5
0
−0.5
0
20
40
Ti me [ se c ]
−0.4
−0.6
−0.8
Perturbation
response
Switch
(Regulation−Tracking)
0
20
40
Ti me [ se c ]
0.8
x
˜ 2 , 2 [ rad/se c ]
x
˜ 2 , 1 [ rad/se c ]
1.5
−0.2
Switch
0.6 (Regulation−Tracking)
Perturbation
response
0.4
0.2
0
−0.2
0
20
40
Ti me [ se c ]
Fig. 2: Error signals x
˜i,j for i, j = 1, 2 of the trajectory tracking. The subindex
i and j are the position and velocity.
5
Concluding remarks
A class of global UUB-stable control for Lagrangian systems has beed presented
in this paper. In order to obtain the robust stability analysis, we used likepassivity injection based on dynamical properties and the quasi-Lipschitz perturbations characteristics. Theoretical robust analysis stability of PID-CT compensator under external but bounded perturbations has been done successfully.
Experimental validation was conducted by perturbations between the robotic
arm positions x1 and x2 . Here, we have defined a methodology to obtain the
KP , KD , and KI gains matrices of the PID-CT compensator. Even more, we
used an storage function based on the trajectory error in order to guarantee the
asymptotic convergence. A comparison between the Ziegler Nichols algorithm
and the algorithm proposed showed that it has a better performance in order
to reject external disturbances and dynamic uncertainties. Additionally, the
maximal overshot of the closed-loop system is given by the Ultimate Bound of
the stability analysis, this is because that once the trajectory arrive to the ellipsoid, this remains there. Thus, the main result of this contribution opens the
door for the study of output feedback compensators for LNDS. Even more with
this result, we will study the case when the dynamical system has not external
perturbation and dynamic uncertain, waiting to probe exponential stability (see
expression (12)).
5 Concluding remarks
11
Control Si gnal 1
2.5
T 1 [ N/m]
2
1.5
Perturbation
response
1
Switch
(Regulation−Tracking)
0.5
0
0
2.2
2
1.8
25
30
Ti me [ se c ]
Control Si gnal 2
10
25.2
20
25.4
40
25.6
50
T 2 [ N/m]
1
Perturbation
response
0.5
0
Switch
(Regulation−Tracking)
−0.5
−1
0
10
20
0.3
0.2
0.1
0
−0.1
25
30
Ti me [ se c ]
25.2
25.4
40
25.6
50
Fig. 3: Control signals, for first and second link (two algorithms).
Z i e gl e r-Ni chol s me thod
0.6
Trajectory
Rererence
0.4
0.2
Y -me te rs
Y -me te rs
Trajectory
Rererence
0.4
0.2
0
−0.2
0
−0.2
0.4
0.4
−0.4
−0.4
0.3
0.3
−0.6
−0.6
0.2
−0.8
−0.8
Robust P I D me thod
0.6
0.2
−0.6
0.3
−0.4
0.2
0.4
−0.2
0
X -me te rs
0.2
0.4
0.6
−0.8
−0.8
0.2
−0.6
0.3
−0.4
0.4
−0.2
0
X -me te rs
0.2
Fig. 4: Trajectory on work space, comparison between the Ziegler-Nichols
method and the Robust PID method.
References
[1] Arnold V. I., Mathematical methods of classical mechanics, Graduated
Texts in mathematics, 2nd edn, Springer-Verlag, N.Y., 1989.
[2] Lewis F., Dawson D., Abdallah C., Robot Manipulator Control: Theory
and Practice, 2nd Edition, Marcel Dekker Inc, New York, NY 10016, 2004.
0.4
0.6
5 Concluding remarks
12
[3] LaSalle J., Lefschetz S., Stability by Liapunov’s Direct Method: With Applications, Academic Press, N.Y. 1961.
[4] Haddad W., Chellaboina V., Nonlinear Dynamical Systems and Control:
A Lyapunov-Based Approach, Princeton University Press, 2008.
[5] Takeshi T., Stability Theorems of Perturbed Linear Ordinary Differential
Equations, Journal of Mathematical Analysis and Applications, 149, pp.
583-598, 1990.
[6] Parra-Vega V, Arimoto S., Liu, Hirzinger, and Akella P., Dynamic sliding
PID control for tracking of robot manipulators: Theory and experiments,
IEEE Transaction on Robotics and Automation, Vol. 19, No. 6, pp. 976985, 2003.
[7] Spong M., Hutchinson S., and Vidyasagar M. Robot Modeling and Control,
John Wiley & Sons, Inc, 2006.
[8] Ortega R., Astolfi A., and Barabanov N., Nonlinear PI Control of Uncertain
Systems: An Alternative to Parametric Adaptation, Systems & Control
Letters, 47:3, pp 259-278, 2002.
[9] Pervozvanski A. and Freidovich L., Robust stabilization of robotic manipulator by PID controllers, Dynamics and Control, 9:3 pp. 203-222, 1999.
[10] Tae-Yong K., and Woong-Gie H., An adaptive PID learning of robot manipulator, Automatica, 36 pp. 717-725 2000.
˙ om, H¨
[11] Astr¨
agglund T., Revisiting the Ziegler-Nichols step response method
for PID control, Journal of Process Control, 14:6 pp. 635-650, 2004.
˙ om, H¨
[12] Astr¨
agglund T., Advanced PID Control, Instrumentation, and Automation Society, 2006 USA.
[13] Kelly R., Santiba˜
nez V. and Lor´ıa A., Control of Robot Manipulators in
Joint Space, Springer-Verlag London Limited, 2005.
[14] Bullo and Lewis, Geometric Control of Mechanical Systems, SpringerVerlag, 2004.
[15] Bullo and Murray, Tracking for fully actuated mechanical systems: a geometric framework, Automatica, 35:1, pp. 17-34, 1999.
[16] Duncan G. J, Schweppe F. C., Control of linear dynamic systems with set
constrained disturbances, IEEE Transactions on Automatic Control, 16,
pp. 411-423, 1971.
[17] Mien V, Hee-Jun K., Young-Soo S., and Kyoo-Sik S., A Robust Fault Diagnosis and Accommodation Scheme for Robot Manipulators, International
Journal of Control, Automation, and Systems, 11:2, pp. 377-388 2013.
5 Concluding remarks
13
[18] Kurzhanski A. B, Veliov V. M., Modeling Techniques and Uncertain Sys¨
tems, BirkhAauser,
New York, 1994.
[19] Ordaz P., and Poznyak A., KL-Adaptation for Attractive Ellipsoid Method
in Robust Nonlinear Control. IMA Journal of Mathematical Control and
Information, 2014.
[20] Marsden, Jerrold E., Elementary of One Classical Analysis, W. H. Freeman
and Company, 1974.
[21] Peaucelle D., Henrion D., Labit Y., and Taitz K., User’s Guide for SeDuMi
Interface 1.04, 2002.
[22] Poznyak A., Variable Structure Systems: from Principles to Implementation, Chapter book, Ch-3, IEE Control Series, 66: 45-78, 2004.
Properties of Lagrangian mechanical systems: The dynamic equation
for Lagrangian mechanical systems (1) has the following interesting properties.
Inertial matrix D(q) is positive definite, and D(q) and C(q, q)
˙ have the following
properties [13, 14, 7]:
• There exist some positive constants (δ0 , δ1 < ∞) such that
δ0 In×n ≤ D(q) ≤ δ1 In×n
∀q ∈ Rn
(17)
where In×n denotes the n by n identity matrix. So, matrix D−1 (q) exists
and it is positive definite.
• Matrix C(q, q)
˙ has a relationship with the inertial matrix as follows:
˙
D(q)
= C(q, q)
˙ + C(q, q)
˙ |
(18)
˙
− C(q, q)
˙ is the skew-symmetric property, where C(q, q)
˙ is
In fact, 21 D(q)
a matrix, univocally defined by D(q).
d
Proof of Theorem 3: The time derivative of the energy function dt
V (y) := V˙ (y)
is given as follows:
˙ 1 )˜
V˙ (y) = 2hy, Pyi
˙ + h˜
x2 , D(x
x2 i
(19)
or in extended form
V˙ (y) =
0
n×n
y, P11
P|
12
P|
P12
11
|
P12 +P|
12 P22
P22
0n×n
y
˙ 1 )˜
+2h˜
x2 , D(x1 )x
˜˙ 2 i + h˜
x2 , D(x
x2 i
notice that, from Lagrangian formulation (3) and from dynamical error we have:
x˙ 2 = D−1 (x1 ) {u + ζ(x, t) − C(x)x2 − G(x1 )} , x
˜˙ 2 := x˙ 2 − x˙ d2
5 Concluding remarks
14
using the kinetic-Corolis matrices properties (18) on the right hand side of (19),
we have that
h˜
x2 , D(x1 )x
˜˙ 2 i = h˜
x2 , D(x1 )(x˙ 2 − x˙ d2 )i
= h˜
x2 , u + ζ(x, t) − C(x)x2 − G(x1 ) − D(x1 )x˙ d2 i
= h˜
x2 , u + ζ(x, t) − C(x)˜
x2 − C(x)xd2 − G(x1 ) − D(x1 )x˙ d2 i
and using the control law (8)
u = D(x1 )x˙ d2 + C(x)xd2 + G(x1 ) − KI ξ(˜
x1 ) − KP x
˜ 1 − KD x
˜2
we obtain the following
h˜
x2 , D(x1 )x
˜˙ 2 i = h˜
x2 , −KI ξ(˜
x1 ) − KP x
˜ 1 − KD x
˜2 − C(x1 , x2 )˜
x2 i
= h˜
x2 , −KI ξ(˜
x1 ) − KP x
˜1 − KD x
˜2 i − h˜
x2 , C(x)˜
x2 i
then, the time derivative yields as:
0
P|
n×n
11
V˙ (y) = y, P11 P12 +P|12
P|
12
P22
P12
P|
22
0n×n
˙ 1 )˜
y + h˜
x2 , D(x
x2 i
−2h˜
x2 , C(x)˜
x2 i + 2h˜
x2 , −KI ξ(˜
x1 ) − KP x
˜1 − KD x
˜2 i
this expression contains the skew-symmetric property, and it reduce the expression as follows
0n×n
P12 −K|
P|
11
I
|
|
|
˙
P11
P12 +P12 P22 −KP y
(20)
V (y) = y,
P|
12 −KI P22 −KP
−KD
adding and subtracting the energetic function on equation (20), we obtain
αP11
αP12 +P|
P12 −K|
11
I
y − αV (y)
V˙ (y) = y, αP|12 +P11 αP22 +P12 +P|12 P|22 −K|P
P|
12 −KI
P22 −KP
−KD +αD(x1 )
and realizing the same procedure over εkξ(˜
x1 )k2KI , with 0 < ε in the last equation under assumption that
kξ(˜
x1 )k2KI := ξ(˜
x1 )| KI ξ(˜
x1 ) ≤ c0 + c1 kξ(˜
x1 )k2
then, we have the following expression:
V˙ (y) ≤ −hy, W(y)yi − αV (y) + εc0
where the matrix W(y) have the following nonlinear-matrix format:
−εc1 In×n +αP11 αP12 +P|
P12 −K|
11
I
|
αP|
αP22 +P12 +P|
P|
W(y) =
12 +P11
12
22 −KP
P|
12 −KI
P22 −KP
−KD +αD(x1 )
Now, if we apply the upper bounds properties from the Lagrangian formulation
(17), this nonlinear matrix becomes a bilinear one W (see the expression (10)).
Then, the energy function time’s derivative can be defined as follows:
V˙ (y) ≤ −hy, Wyi − αV (y) + β, β := εc0
5 Concluding remarks
15
note that if the matrix W is positive definite, then the energetic function time’s
derivative (19) holds the following inequality
V˙ (y) ≤ −αV (y) + β
(21)
and its solution on the time interval t ∈ [t0 , t) define the next inequality:4
V˙ (y) ≤ −αV (y) + β =⇒
β
(1 − exp [−α(t − t0 )])
V (y) ≤ V (0) exp [−α(t − t0 )] + α
and its final value comes to the expression (11), which means that all trajectories
of the extended vector {y} converges to an attractive ellipsoid. The proof is
complete.
Proof of the Theorem 4: Notice that the function [¯
y ]+ is not differentiable
2
in the point y¯ = 0, but the function [¯
y ]+ is differentiable everywhere. Based
on this fact, and following [22], we may conclude that the function
G (V (y)) :=
h
i
p
p
V (y) − β/α
2
+
(22)
is also differentiable everywhere. That is because
d
(y)) = dV
G (V (y)) V˙ (y) =
hp
i V˙ (y)
p
V (y) − β/α p
+
V (y)
d
dt G (V
Using the inequality (21), we obtain
h√
d
dt G(V
(y))≤
V (y)−
√βi
α
+
−αV (y)+β
√
V (y)
=
h√
√ β i V (y)− αβ
√
−α
V (y)− α
=
V (y)
+
h√
√ β i 2 √V (y)+√β/α
√
−α
V (y)− α
≤0
(23)
V (y)
+
which proves (13). Since the nonnegative function G (V (y)) is monotonically
non-increasing, by the Weierstrass theorem, it has a limit, i.e., there exists
0 ≤ G∗ = lim G (V (y))
t→∞
(24)
Integrating (23) implies that
−α
R|
=0
h√
G(V (y))−G(V (y))≤
√ β i 2 √V (y(t))+√β/α
√
dt
α
V (y(t))−
+
V (y(t))
or, equivalently that
4 The variable t define a funny change of variable on time, and V (0) define the initial
condition of the energetic function.
5 Concluding remarks
α
R|
16
p
t=0
q
!
β
q 2
α
β
1 + p
dt
V (y (t)) − α
V (y (t))
+
≤ G (V (y (0))) − G (V (y (t))) ≤ G (V (y (0))) = const
which, for t → ∞ and in view of (22), leads to the following conclusion:
Z∞
p
G (V (y (t))) 1 + p
t=0
β/α
V (t (t))
!
dt < ∞
The convergence of the last integral permits to state that there exists a subsequence {tk }k=1,2,... such that G (V (y (tk ))) → 0. But, the sequence G (V (y (t)))
k→∞
converges (see (24)), and hence, all its subsequence have the same limit point,
which proves that G∗ = 0, and, as a result, we have that {x ∈ Rn : G (V (y)) = 0}
is a positive invariant ellipsoid, then the proof is complete.










© Copyright 2026