
פרק ה - שער לים
שער לים Sea Gate
פרק ה :יסודות בפיזיקה ונושאי רקע לפרקים ו ,ז ,ח
.1
.2
.3
.4
.5
.6
פרקים אלה מתיחסים לימאות המעשית ,אשר נ י תן ללמוד אותה רק מנסיון,
חשוב יותר מכל לימוד היא ההתנסות במה שמכונה " מיקרים ותגובות ".
הלימוד כאן מתייחס לשיט שמטרתו להביא את השטים מנקודה אחת לנקודה שניה ,
ביעילות המירבית שנתן להפיק מכלי שיט נתון .השיט התחרותי חופף לחלק
מההתיחסות ,אך מנוגד וסותר את הגישה של " ימאות טובה " ,אין כאן כיסוי של
חלק זה של השיט ,אלא אם ,באופן מקרי ,יש חפיפה בדרישות .
אל תטרח לקרא אם באפשרו תך לשוט ,חזור וקרא אחרי השיט או כשתגיע לגיל שבו
קוראים וכותבים במקום לשוט ...
כל פעולה ,שנלמדת או מלומדת ראוי שמייד ,בצמוד אליה ,תלמד הפעולה להפסקת
התהליך והפעולה ההפוכה .לדוגמה מייד עם לימוד התנעת מנוע יש ללמוד כיבוי
מנוע ,מייד עם הורדת עוגן יש ללמוד הרמת עוגן ,מייד עם הרמת מפרש יש ללמוד
צמצום והורדה וכך הלאה בכל נושא .ההצדקה לגישה זו נובעת ראשית ,כדי למנוע
פגיעה באנשים ,ובכלי השייט שלך ואלה שבשכנות אליך .שנית ,משום שהפעילות
ההפוכה ,בהרבה מקרים ,מחייבת נגישות למקומות ואמצעים אחרים ממקום
הפעולה הראשוני.
לבוש מתאים ,חלוקת תפקידים ועמדות ,קיום סדר בכלים וחבלים ,וציות לפקודות
על ידי חזרה על פקודות ואשור בצוע ,כל אלה הם הבסיס למניעת פגיעות ותקלות
וגם ל הנאה מעבודת צוות .
הערנות ,ההרגלים והמיומנויות אינם נשמרים אלא אם חוזרים ומתנסים בהם .
אל תחתור רחוק יותר משתוכל לחזור
השפה של הפיזיקה והמקצועות הטכנולוגיים
( הגדרות בסיס ,מידע רקע לכל מקצועות השיט ).
בלמוד עקרונות של תורת השיט ,בספרות ההדרכה ובלשון המרצים ,חוזרים ופוגשים שני
מושגים ,בסיסיים -:זוית ו -וקטור .
גם אם לא למדת מושגים אלה במסגרת כל שהיא ,המשך לקרא ,כאן המקו ם להתחיל ,או
להבין את מה שכבר בצעת וראית ,או מה שלא הופנם בהכרתך .
בלימודי מתמטיקה ופיזיקה מקובל להגדיר כל מושג ,שהוא חדש ללומד ,לפני
שמשתמשים בשמו להגדרות אחרות ,לדוגמה ,מגדירים " נקודה " לפני " קו " ,וקו לפני
" מישור " וכיו " ב .בפרק זה לא תנתנה ההגדרות הראשוניו ת ,אלא רק בהקשר שזה משמש
את למוד הימאות ,ובהסתמך על ' תפישתו החוויתית' של הקורא – לדוגמה כאשר כתוב
" מישור " ההנחה היא שהקורא מבין שמדובר -:בפני הים ,בדף שרטוט ,מפה ימית או כל
חתך דו -ממדי .כמו כן ,ההנחה היא ,שלקורא הכרה מסויימת של פעולות השיט ,ויודע
שניווט הו א מציאת אתרים ונתיבים; ואילו ניתוב הוא תכנון ועצוב התנועה של כלי השיט
בנתיבים שבין אתרים ,ומבין מהם :תמרון ,עגינה ורתוק ( או רתיקה ) .
ההסברים מובאים בהנחה ,שהקורא יכול להסביר לעצמו את הפעולות -:חבור ,חסור ,כפל,
חלוק ,העלאה בחזקה והוצאת שורש .ישנה חשיבות גם להבנה של המושגים " חיבור
אלגברי " " חיבור וקטורי " והכרת ההבדל בין " זהות " " ,שוויון " " ,משוואה " ו " תלות
מתמטית " ( פונקציה) ,ובצוע פעולות כמו שינוי נושא בנוסחה ,ו " ערך משולש " ; אך אלה
יוסברו במקומות שיעזרו להבנה.
רוב המורים וספרי ההדרכה בנושאים טכנולוגיים ,כמו השיט ,פוסחים על מונחי היסוד
בהסתמכם על השכלת רקע של הלומד; המורים ,במסגרות הדרכה למיניה ן ,מוגבלים
במסגרת זמן ,או שאינם מכירים בחשיבות הדיוק בשפה .כתוצאה מכך ,לרוב הלומדים אין
כלים וסבלנות ,להתעכב ולהבין את כוונ ת כל ביטוי .ובעובדה ,מתקיים מצב ,שמילים
ובטויים מובאים לשמוש שגוי ,ואפילו במשמעויות מנוגדות לכוונת המקור .להמחשה-:
לשאלה מה הם שלושת המימדים המרכיבים את ה " עולם הפיזיקלי " ? ראשית יש להבהיר
מהו " העולם הפיזיקלי " ( שתורת השיט כלולה בו ) ? והתשובה -שהעולם הפיזיקלי הוא:
תורת הפיזיקה והישום שלה בהנדסה ובניה .תורת הפיזיקה מורכבת מ -א ) חקירה מהותית
של תופעות .זו חקירה שנותנת הסבר ושמוש צפוי לתופעות שמגלה האדם החוקר .ב )
חקירה כמותית .זו חקירה שמגדירה גדלים ומרכיבה נוסחאות ,כדי לאפשר למהנדסים
והבנאים ,במדידות וחישוב כמויו ת ,להביא לשמוש את התופעות שנחקרו.
מה הם שלושת המימדים המרכיבים את ה " עולם הפיזיקלי " ? צפוי שרוב הקוראים
ישיבו " אורך ,רוחב וגובה " ובכן לא! שלושת אלה הם אותו מימד – מימד של אורך .גם -
אורך ,שטח ונפח הם אותו מימד ,שכן אורך הוא אורך בחזקת אחת ,שטח הוא אורך ברבוע
ונפח הוא אורך בחזקה שלישית ,כלומר בוצעה פעולה אלגברית על אותו מימד .אם כך
מהם המימדים שמשמשים עמודי יסוד לתורת הפיזיקה ? התשובה המצומצמת היא אורך
, Length= Lמסה = , Mass Mוזמן . Time= Tולשימושים נוספים מוגדר גם המטען
החשמלי של אלקטרון כמימד יסוד ēסימן המינוס מעל ה e -בא לסמן שהאלקטרון הוא
חלקיק של מטען שלילי .
כדי להדגיש את משמעותם של L M Tכמיצגים מימד יסוד פיסיקלי ,מקובל
לכתוב את המימד בתוך סוגריים מרובעים ] . [ ē ] [L] [M] [Tיש ספור ,הגורס
שהמילה " יסודות " באנגלית ELEMENTSמקורה במורה או מ ורים שהרבו להשתמש
באותיות אלה -:אל – אמ -אנד טי וכך בשגרת ההגוי הפכו האותיות למילה שמשמעותה
" יסודות " .כהמשך לכך ,תופעות היסוד בטבע ,שמשפיעות על מזג האווי ר ,אף הן מכונות
באנגלית . THE ELEMENTS
ההגדרה המדעית של כל אחד מאלה היא מורכבת ובעיתית ,אם נזהרים שלא להשתמש
במושגים שאינם מכילים את המימד עצמו .תנתן כאן הגדרה חופשית
ועממית -:
] – ] Lאורך הוא רצף של נקודות שונות ,שמתחיל בנקודה קבועה ומסתיים
בנקודה ,קבועה ( מהי נקודה ? ).
] – ] Mמסה היא תכונתו של גוף ( מהוא גוף ? ) להתנגד לשנויים במצבו
( כמות /צפיפות החלקיקים שמרכיבים את הגוף ומחזיקים אותו
בצורתו /בנפח נתון ).
] – ] Tזמן הוא ההבדל בהתרחשות של ארועים .את האירועי ם אנו דוגמים
בחושינו השונים ובזיכרוננ ו ( מה עם אירועי ם שאיננו חשים או זוכרים ? ) ,
כך אנו קובעים " התחלה " " ,סוף " ו " פרקי זמן ".
[ – ] ēמטען חשמלי הוא תכונה של חלקיק חומר להדחות או להמשך על ידי
חלקיקים אחרים .תכונה זו מקבלת שמות שונים בתורות שונות של הפיזיקה
האטומית ( גרעינית ) .בהיסטוריה של חקירת הזרם החשמלי הסתבר,
שהאלקטרונים נעים הפוך למה שהוסכם ,ככוון הזרם ממקורותיו ,ולכן הסימן
מינוס ( ) -מעל ה. ē -
למה זה חשוב ? למי ששואל התשובה היא -:כי זה טוב לדעת! אך גם למניעת בלבול
מושגים וטעויות בפתרון בעיות ,ו כדי לזהות ,שה פתרון אכן נכון גם במימד וביחידות ולא
רק בתוצאה המספרית.
להלן הסבר ,ברצ ף מתפתח ,לסימונים ואותיות שיבואו לשימו ש בפרקים הבאים -:
. 1אורך /מרחק Distance
כאשר אנו מוצאים ש המרחק בין שני אתרים הוא 15מילים ימיים אנו כותבים -:
= Distance = D= 15 nmשם הגודל ומה כלול בכיתוב זה ?
- Dהוא קיצור /סימון לשם הגודל מרחק . Distance -
המימד של מרחק הוא אורך .] L [ 1
= הוא הסימן המתמטי לשוויון.
– 15הוא מספר דו -ספרתי ,ולכן הוא " שלב " בסולם שבין 11ל , 111 -כלומר:
" סדר גודל של עשרות " ( כשהבסיס ל " סדרי -הגודל " הוא כפולות של .)11
– nmזה ה סימון של היחידות בהן בחרנו למדוד את האורך – . Nautical Miles
– Nautical Milesהוא ה כנוי של היחידות בהן בחרנו למדוד את המרחק,
בשונה מ :מטרים ,רגל ,מעלות ,ועוד כיו " ב .
החל מכאן ,בכל שמוש בגודל פיזיקלי ,ראוי שתזהה את המציינים הנלווים -:
שם הגודל ,קיצור מקובל ,סדר גודל שבשמוש ,סימון היחידות בכתב ,כנוי היחידות,
ההרכב של הגודל על ידי שימוש רק במימדי היסוד . LMT
תרגיל דוגמה להמחשת השמוש במציינים הנ " ל ( מודגשים באדום )-:
משיט מתכנן לצאת עם ספינתו ,ממרינה הרצליה למרינה לרנקה בקפריסין ,המרחק במפה
הימית ( 175nmמילים ימיים ) .כמה ליטרים דלק עליו לשאת ,כדי להגיע ליעד?
נתונים לחישוב:
. 1כשמטרת השיט אינה " מבצע שהצלחתו הכרחית " ,ההגיון נותן ,שכדאי לתכנן
למקרה הגרוע ביותר ,אך לא כדאי להשקיע בתכנון למקרים קיצוניים של " כח
עליון ".
. 2מבחינת " ימאות טובה " מקובל לשאת לפחות 25%עודף דלק ,מעל לכמות שחושבה
כהכרחית .
. 3נבחר ב " מהירות השיוט " של כלי השיט ,בטעינה ו שוקע תקניים ,ובמספר סיבובי ציר
( סל " ד ) ,שמומלץ על ידי היצרן ,ובים שקט ,כ ( 7Knt -קשר מיל ימי בשעה ).
. 4מקובל שצריכת הדלק של מנוע דיזל היא כ 181 -גרם בכל שעה של פעולת מנוע ,
לכל כח -סוס של הספק המנוע .
. 5דלק -סולר קל מהמים ,וצפיפותו ( יחידות משקל ליחידת נפח) היא 1.8 4ביחס למים
( ישנם דלקי -סולר שצפיפותם ) 0.88/0.87
. 6נניח שנפח מיכלי הדלק של הספינה 121ליטר .
. 7בספר המנוע ובתעודת " כושר השיט " של הספינה כתוב שהספק המנוע 24Kw
( קילו -ווט ).
( 1hp . 8כח סוס ) הוא הספק של כ 736 Watts -וו ט .
פתרון-:
א .מספר שעות הצפוי לפעולת מנוע ,הוא המרחק מחולק במהירות 25h
ב .הספק המנוע ב " כוחות סוס " יהיה ,לאחר הפיכת 24Kwל,24.000w -
175nm
7kts
.
24000
32HP
736
ג .בכל שעה צורכים 181גרם לכל 181 , 1HPגרם הם 1,18קילו -גרם ,ולכן
התצרוכת ל 1 -שעה תהיה 0,18ק " ג 32 Xכ " ס = 5.76ק " ג סולר בשעה.
ד .אנו מעונינים להפוך את יחידות הצריכה מק " ג לליטר ,משום שהדלק מסופק ,
ומחירו נקוב לנו ,ביחידות נפח ולא ביחידות משקל .כפי שנתון לעיל ,צפיפות
( ק " ג לליטר ) הסולר קטנה מצפיפות המים ,ביחס של , 1.8 4לכן 5.76ק " ג
5.76
סולר יתפסו נפח ג דול יותר של 6.86 7 lit.
0.84
ל 25 -שעות מנוע יהיו דרושים 7ליטר /שעה 25 Xשעות = 175ליטר .
175
ה .היות ומעונינים בעתודה של 25%יש להוסיף ¼ מהכמות כלומר
44
4
ליטר ,ונצטרך למלא 224 = 181 + 44ליטר .היות והמיכלים של הספינה
בנויים ל 121 -ליטר ,נזדקק לתוספת מיכל או מיכלים של 114 = 121 – 224 -:
ליטר .לסיכום ציטוט כלל אצבע -:
Use the old rule of thumb; Use one-third of the fuel in your tank to get there, onethird to get back and save the last third as an emergency backup .
. 2מהירות Velocity
כשאנו מוצאים שמהירות כלי השיט היא 7מילים ימיים בשעה אנו כותבים -:
Velocity = V = 7Ktsברישום הימי מקובל הקיצור SPDמהמילה .SPEED
– Vמהירות על פי הגדרתה היא דרך שגוף עובר ביחידת זמן
לכן המימדים מהם מורכבת המהירות הם אורך חלקי זמן
את האורך , Lבים ,בחרנו למדוד ביחידות של מילים ימיים ; n.m.את הזמן Tבחרנו
למדוד ביחידות של שעות . Hours=hהערכים המספריים של ) Distance ( LוT -
נבחרים ומחושבים מתוך סולם שמתאים לשמוש .
כלומר ,לא נבחר להביע את המרחק באלפיות של מטר ( מילימטרים ) ואת הזמן בשנים ,
זאת כדי שהכיתוב לא יהיה מרובה ספרות לפני ואחרי הנקודה העשרונית .גבולות הסולם
בו אנו בוחרים להשתמש ,הוא " סדר הגודל " .משתדלים לבחור סדרי גודל כך שהכיתוב
של ערכים יהיה במספר קטן של ספרות .בדוגמה שלפנינו 7קשר הוא בסולם שבין 1ל11 -
כלומר סדר גודל של יחידות ( ,בסעיף 15 , 1מיל ימי סדר הגודל הוא בין 11ל 111 -כלומר
סדר -גודל של עשרות ).
כאן ,בתורת השיט ,במקום לכתוב " :מילים ימיים בשעה " מכנים את יחידת המהירות
" קשר " KNOTSוסימון היחידות הוא . KTS
למרות שהאורך והזמן הם גדלים שנוקבים את ערכם מתוך סולם של ערכים ,כלומר הם
גדלים המכונים " גדלים סקאלריים " ( סולמיים ) ,החלוקה של אורך בזמן אינה גודל סקאלרי
טהור .על פי מהות ההגדרה ,המהירות של גוף היא בכוון מסויים ,ולכן חייבים לציין את
כוון התנועה במהירות הנד ונה .מצורך זה ,נובע מושג חדש " -גודל וקטורי " .כל גודל
שקשור בכוון מכונה " גודל וקטורי " .לשמושים מסוימים ,כאשר הכוון משתנה עם הזמן ,
משתמשים בכנוי " פאזור " במקום " וקטור " .
בנתינת ערכו של גודל וקטורי חייבים לתת בו זמנית את מספר היחידות ,מתוך סולם
נבחר ,ואת הכוון .פעולות החישוב שבין וקטורים ,או בין וקטורים וגדלים סקאלריים ,שונות
מאשר הפעולות האלגבריות של חסור ,חבור כפל וחלוק במספרים .
אם לא נדע את כללי האלגברה ביחס לווקטורים ,לא נוכל להבין את פעולת הרוח על
מפרש; את פעולת המים על לוח ההגה ,את פעולת המדחף על ה מים; את נתיב כלי השיט
בזרם; את המתיחות בחבלים וכבלים ועוד כיו " ב .לצורך פתרון בעיות עם וקטורים נוח
אך על כך בהמשך.
להשתמש בשרטוט שבו הוקטורים מתוארים כחיצים
. 3תאוצה acceleration
כאשר אנו גורמים לכלי שיט לנוע ממצב נייח ועד למהירות הרצויה ,אנו
גורמים לו ל " האיץ " .מהות ה " תאוצה " היא תוספת מהירות ביחידת זמן.
תוספת המהירות היא ההפרש בין המהירות ,שהגענו אליה בסוף יחידת הזמן,
לזו שהיינו בה בתחילת יחידת הזמן .Δt =t-t 0
Δמסמן הפרש בין שני ערכים .Difference
כותבים גם V t ± V 0כדי לכלול את המקרה של תאו צה שלילית כלומר " תאוטה " בעצירה .
התאוצה aאינה שמושית לשיט בסיסי ,וגם אינה פשוטה למדידה ,
אך היא משמשת להגדרות חשובות יותר .
מימדיה של התאוצה מורכבים מהפרש מהירות ΔVחלקי זמן . tהיות והפרש של
מהירויות אף הוא מהירות ,המימדים יהיו :אורך חלקי זמן ברבוע
לתאוצה אין סמל יחידות וכנוי יחידות אלא רושמים ואומרים את יחידות המרחק חלקי
יחידות הזמן ברבוע ,את התאוצה הנגרמת ממשיכת כדור הארץ מסמני ב g -במקום ב. a -
ישנה שגיאה נפוצה בין " עכברי יבשה " ,שמביעים את מהירות הרוח ב " -קשר לשעה ".
לדוגמה " 21קשר לשעה " .זו שגיאה ה יות וקשר הוא הכנוי ליחידת מהירות של מילים
ימיים בשעה " 21 .קשר לשעה " אומר שכל שעה מהירות הרוח גדלה ב 21 -קשר ,וזו ,
כמובן ,תאוצה די מפחידה ...
. 4כח FORCE
כאשר אנו מותחים מפרש אנו גורמים לרוח להפעיל עליו כח ,כאשר אנו מפעילים מנוע
ומשלבים מדחף אנו מעתיקים את כח המנוע לכח דחף במים ,כך גם עם פעילויות רבות
אחרות .מהו כח ? לפי דוגמאות אלה ,הכח הוא הסיבה שגוף ישנה את מצבו ,ובמקרה
שהגוף עובר ממנוחה לתנועה ,הרי הוא מאיץ ממהירות אפסית למהירות בערך כל שהוא.
ולכן הכח מו גדר כמכפלה של תאוצה במסה .וכותבים . Force = F = m x a -:מסה היא
גודל " סקאלרי " ואילו התאוצה היא " גודל וקטורי " ,ובמקרה זה יוצא שגם הכח הוא " גודל
וקטורי " .זה מוביל לכך שיש לציין את כוון הכח ,ולפתור בעיות בנדון השפעת כוחות,
בכללי מתמטיקה של ווקטורים .
מהוא המימד של כח ?
היחידות שמשמשות למדידת מסה הן גרם -מסה או ק " ג -מסה ,התאוצה שמקבלת מסה ,
מכח המשיכה של כדור הארץ ,בכוון מרכזו ,היא 8.8מטרים בשניה ברבוע ,ובמקום a
מקובל לסמנה ב , Gravity = g -וזו מכונה " התאוצה הארצית " " .שדה הכבידה" של כדור
הארץ הוא המרחב שבו מורגשת פ עולת כוחות על מסות שגורמים להן לתאוצה של
g=9.8m/s 2בכוון מרכז הכדור .חשוב להבחין :
א ) המסה של גוף אינה משתנה על על כדור הארץ ,ולא בכל מקום אחר במרחב ,ואף לא
אם יהפוך מוצק לפרורים או לנוזל או לגאזים .
ב ) אם נכפיל את התאוצה הארצית במסה של גוף נקבל את מה שמכ ונה " משקלו " של
הגוף במקום בו הוא נמצא ,כלומר כח Fביחידות של ק " ג -כח או " ק " ג -משקל " ,ואלה
שונות מק " ג -מסה .
ג ) כאשר יש לחשב כמויות ,בוחרים מערכת יחידות מוסכמת ,שמתואמת לאותו נושא
שעוסקים בו .לדוגמה בשיט תחרותי עכשווי יש שימוש למדידת מהירות ביחידות של
" אורכי -סירה " .בהשוואת המהירות של שתי סירות מתחרות ,אומרים שהאחת מהירה
מהשניה ב " 3אורכי סירה " ולא ב 4 -ק " מ לשעה ,או ב 2 -קשרים .בשלבי הלמוד ,ובשימושים
נפוצים מקובל ,לחשב במערכת המכונה " מערכת יחידות . " MKSבמערכת זו מבטאים:
אורכים [L] -במטרים ,מסה [M] -בק " ג ( אלפי גרמים ) ,וזמן – ] [Tבשניות .במערכת זו
הכח Fנמדד ביחידות המכונות ניוטון ,על שם הפיזיקאי , Newtonנפוצה גם מע רכת
דומה המכונה " מערכת מדעית בין -לאומית " ההבדל אינו משמעותי לדיון כאן.
ד ) השוני בין 1ק " ג מסה ל 1 -ק " ג כח /משקל תלוי בתאוצה .כאשר משתמשים במילה
" משקל " מתכונים לכך שכח המשיכה של כדור הארץ פועל על על המסה וגורם לה לנפילה
בתאוצה של m/s 2 8.8או אם אינה נעה אלא ני יחת ,היא מפעילה כח של 1 -:ק "ג -מסה x
1 = m/s 2 8.8ק " ג כח .מקובל להגדיר משקל על פני כדור הארץ , Weight = W= m xg
אם נעגל 8.8ל 11 -נקבל ש 1ק " ג משקל = 11ניוטון .
לסכום :כח Fהוא מכפלה של מסה בתאוצה; הכח הוא " גודל וקטורי " והוא נמדד ביחידות
" ניוטון " במערכת . MKS
הערה למשיט :ב ספרות ההדרכה ובשאלונים נתקלים בשמוש בביטויים " עצמת הרוח " או
" עצמת הזרם " " .עצמה " משמעותה כח ,ואינה נמדדת ביחידות " קשר " או ק " מ בשעה .
המהירות והכח שניהם גדלים וקטוריים אך הם שונים כפי שהוסבר לעיל .לכן ,כדי לדייק ,
היה ראוי להתיחס ל " מהירות הרוח " ו " מהירות הזרם " ,ולזכור ששני אלה נמדדים
ביחידות " קשר " או ק " מ בשעה ,ולא ב " ניוטון " או ק " ג -כח .אילו רצינו למדוד את " עצמת "
הרוח או הזרם ,היינו נדרשים להתיחס ליחידת שטח ,של כלי השיט או מפרש ,או ליחידות
תאוצה ,שמושפעים מפעולת הכח.
. 5עבודה ENERGY / WORK
הפעולה של כח לאורך דרך /מרחק מכונה עבודה , W=FxSאך העבודה היא גודל פיסיקלי ,
שיכול להיות אגור /צבור /מאוחסן בתוך חומרים ומתקנים בצורות שונות.
כאשר יש מאגר שאפשר להפיק ממנו עבודה ,במקום " עבודה " משתמשים במילה אנרגיה
.במערכת MKSיחידות העבודה מכונות ג ' אול , Joulesהמאגר ,שבו שמורה היכולת
לבצע עבודה ,נקרא " מקור -אנרגיה "; וכדי להפיק את העבודה הרצויה ממקור אנרגיה יש
לבצע פעולה המכונה " המרת -אנרגיה " והמתקן המבצע את ההמרה יכול לקבל שמות
שונים .נקדים ,שבכל המרת אנרגיה ישנם הפסדים,
ועובדה זו הובילה להגדרת מושג ה " נצילות " על כך בהמשך .הממירים השונים מכתיבים
גם יחידות שונות להערכת העבודה ,לדוגמה כאשר ממירים חומרי דלק לחום העבודה
נמדדת ב " קלוריות " ולא כהכרח ב -ג ' אול ,יחידת -חום היא בקרוב 4.2ג ' אול לכל קלוריה ,
במזגנים פוגשים ביחידות B.T.Uשהן " יחידות טרמיות בריטיות " כשהיחס הוא 1 BTU
. =252 Calלהלן מספר מתקנים שכוללים ממירים עם שמות נפוצים ומוכרים :מקרן-
חום /רדיאטור ,אנטנה ,מחולל -חשמלי /גנרטור ,מנועי קיטור ,דיזל ובנזין ,תאים וסוללות
מצברים ,שנאים /טרנספורמטורים ועוד כיו " ב .
העבודה W=FxSהיא מכפלה של גודל וקטורי ( כח ) בג ודל סקאלרי ( דרך ) ,אך היא בעצמה
גודל סקאלרי והמימדים שלה הם -:
. 6הספק POWER
ההספק הוא כמות העבודה שמתבצעת ביחידת זמן -:
את ההספק ,במערכת MKSמודדים ביחידות המכונות
Wattאו אלפי ווטים , KWכש = 11 3 = K -סדר גודל של אלפים .
המימדים של ההספק הם -:
את עצמתם של מנועים נהוג לנקוב ביחידות של הספק = KWקילו -ווטים או
" Horse- Power = HPכחות סוס " ,כאשר 1כ " ס = 746ווט .
יש לשים לב לכך שחברות המספקות חשמל ,בין למגורים ,ובין לכלי שיט הרתוקים לרציף ,
מה שמכונה " חשמל חוף " ,נוקבות את העלות של השמוש ביחידות ה מכונות = KWh
" קילו -ווט xשעה " ,ואלו אינן יחידות הספק ,אלא יחידות עבודה ,שכן אם נשנה את נושא
נוסחת ההספק שלעיל נקבל W=Pxtכלומר -הספק Xזמן = עבודה .זאת ,משום שאת
ספקי האנרגיה לא מענין בכמה זמן צרכנו אותה ,אלא איזה חלק מהמאגר שלהם צרכנו ,
ועל כך יגבה המחיר .כאשר אנו רוכשים מכשור ,שצורך אנרגיה ,ראוי שנחשב ,לפני
הרכישה ,באם יש ברשותנו ספק אנרגיה מתאים ובאם העלות הכספית מוצדקת ,ויש לנו
את התקציב הכספי עבורה.
תרגיל של חישוב עלות חשמל חוף- :
נניח שבכלי השייט אין רשת צרכנים שפועלת ישירות מחשמל חוף במתח חילופין ,אלא
ישנה יחידת המרה ומיתוג ,שמזינה את הרשת 12Vזרם ישר ,של כלי השייט .הנחה זו
באה היות ויש כלי שייט ,שמותקנות בהם יותר מרשת אחת ,ובכל רשת ,צרכנים משלה .
לדוגמה :רשת צרכנים 220Vבזרם חילו פין ( תאורה ,מזוג אויר ,מקרר /בר ,חמום מים ,
תנורי בישול וכל צורך חופי ) .רשת חשמל ל " צרכנים בזמן חרום " – שניזונ ה ממצברים
מיוחדים לה 12 ,או 24Vזרם ישר ) , ) DCוהרשת ה " שגרתית " בזמן שייט ,בדרך כלל
. 12VDC
תאור ת ' חללי מחיה ' ( מגורים ,סלון ,מטבח ,שרותים ,שולחן מפות ) נניח 21נורות בהספק
6Wכל אחת נקבל . 6Wx20 = 120W
מקרר שצורך כ 8 -אמפר ב 12 V -הוא בהספק . 86 W
2אורות סיפון ואור ל " עמדת שליטה " ושולחן אוכל חיצוני 15Wכל נורה
. 15Wx3 = 45W
2מאווררים של 20Wכל אחד . 40W
אלה הם הצרכנים שיפעלו מירב הזמן ,אך נתן להוסיף צרכנים ,שיפעלו תקופות קצרות ,
כמו בבקורת של חלל מנוע ,מנורה ניידת ,תאורת תאי אכסון ואחרים .לטובת כל אלה
נוסיף . 15W
נסכם את ההספקים להספק כללי ונקבל 120W+96W+45W+40W+15W = 396W
לנוחיות נעגל למעלה ל. 0.4KW = 400W -
בעת כתיבת תרגיל זה ,המחיר של 1000Wהנצרכים במשך שעה ( , (1KWhישירות
מהרשת ( (220V ACשל חברת החשמל הוא כ 1.5 -שקל .ב הנחה שהצריכה הממוצעת
נמשכת כ 6 -שעות ביממה ,הרי שהצריכה היא-:
, 0.4KW x 6hours = 2.4KWhוהעלות תהיה 1.5 x 2.4KWhשקל = 1.2שקל .
אלא ,שהוצב תנאי שישנה יחידת המרה ומיתוג ,שמזינה את רשת הספינה 12V ,זרם
ישר .בכל מקרה שבו מתבצעת המרת אנרגיה ישנם הפסדים ,כלומר הנצילות של ההמרה
אינה . 111%
בהקשר להספק ה גודל המכונה " נצילות " הוא היחס בין ההספק המופק ,ממתקן כל שהוא,
לבין ההספק המושקע בו .
הספק מופק
=
הספק מושקע
את הנצילות מקובל לסמן באות היוונית " אטה " .
כשאין הפסדים בהמרות האנרגיה , 1 = אך מצב זה אינן קיים ,ובדרך כלל הנצילות
קטנה מ ,1ומקובל להביע אותה באחוזים .
במקרה של התרגיל הנתון ,אם היחס בין ההספק הנצרך וההספק החשמלי המושקע בו
הוא 1.7באחוזים 111%= 1ו. = 71% = 1.7 -
הנצילות היא מספר טהור ללא מימד ,משום שהיא יחס בין שני גדלים זהים ,והמימד
" מצטמצם " .
לצורך חישוב העלות ,במקרה הנתון ,יש להוסיף עוד 31%לעלות שחושבה לעיל ,אך
בדרך כלל ,לא פשוט לחשב מראש את ההפסדים למיניהם ,ופשוט יותר להעריך אותם
לאחר שמוש מבוקר .כן יש לזכור שהמחיר ל 1KWh -שונה משל חברת החשמל במרינות
השונות.
משיטים ,נתקלים במושג ההספק ,כאשר הם רוכשים כלי שיט או מנוע חדש ,וכאשר הם
נדרשים למלא נתונים בטופס בדיקה ראשונית ו תעודת כשירות לרשויות הרישוי ,וכן
למנהלות המרינות והמעגנות .הספקי המנועים נתונים על ידי היצרנים על סמך הרצת
המנוע כנגד עומס תקני .המספר נקוב ב ( KW -אלפי ווטים ) או ב ( HP -כוחות סוס) ,ואינו
נתון מדויק לחישוב נצילותו .הנצילות תהיה תלויה באיכות ההתקנה ,בסוג המדחף ,
בעומס הכללי שיצרך ,בגודל ,במבנה והטעינה של כלי השיט ,ועוד תנאים רבים אחרים .
. 7ריכוז מושגים בחשמל ( המושגים מובאים כאן רק לצורך הכרה ראשונית ובכוונה ,שאפשר יהיה
להשתמש בהם בהסב רים ,להגדרות מורחבות ראה חוברת " עזרי ניווט וקשר " עמודים מי 87 -עד -
, 81או כל חומר ביסודות החשמל ).
ששת ההסברים עד כאן התיחסו לפרק ,שמכונה " יסודות הפיזיקה " ,ועליו נבנו פרקים
אחרים .בכלי שיט פוגשים במתקני חשמל ואלקטרוניקה ,הן לצורך הפעלה ,והן בשלבי
ההסמכה ,נזקק המשיט להכרת מושגים בתורת החשמל .מובאים להלן המושגים
היסודיים ,בלי הפרוק למימדים ,אך בהרחבה של הקשר לשמוש הנפוץ -:
אלקטרון - ēזהו חלקיק במבנה של החומרים השונים ,אשר עצם קיומו ותנועתו נותנים
לחומר ולסביבתו תכונות מסוימות .התכונות הן בעקר הפעלת כוחו ת וגרימת שינויים
בחומר ובסביבתו .המקור לתכונות הוא מה שמכונה " מטען חשמלי " ,כשהמטען של
אלקטרון בודד הוא היחידה הקטנה ביותר של התכונות החשמליות שנתן לזהות ,וכפי
שצוין מתיחסים אליו כמימד הרביעי ]. [ē
ישנו מושג המכונה " אלקטרוניים חופשיים " ,אלה אלקטרונים שאינם חלק ממבנה חומר
היסוד ,ונעים בסביבת הגרעין ,אלא נעים בתוך החומר ,בהשפעת התנאים בסביבתם ,ונתן
לכוונם לבצוע עבודה .
מטען חשמלי – Qגוף או מקום שיש בו עודף של אלקטרונים ,נאמר עליו שהוא בעל
מטען שלילי ( ;) -גוף או מקום שיש בו חוסר של אלקטרונים ,אומרים עליו שהוא בעל
מטען חיובי (.)+
אלקטרונים או חלקיקי -חומר טעונים ( פרודות טעונות /יונים ) ידחו ממקום של עודף וימשכו
למקום של חוסר כדי להגיע למצב מאוזן ; זאת בדומה לנוזל בכלים שלובים או השקעים
והרמות של הלחץ האטמוספרי בתורת מזג האויר .
ההתפתחות הטכנולוגית אליה הגיע האדם לא הייתה מתאפשרת אילו לא נחקרה תנועת
המטענים ,והפיכתה לכלי עבודה ,באין ספור מתקנים המכונים " מתקנים חשמליים " .את
כמות המטען החשמלי מודדים ביחידות המכונות " קולון ".
שדה חשמלי – Eזה המרחב שבו מורגשת פעולת כוחות על מטענים חשמליים ,לדוגמה
בין הקטבים של סוללה .שדות חשמליים מתקיימים במ גע ובחיכוך של חומרים שונים הן
בינהם והן עם המים והאויר .אי ידיעה של קיומם ,יכולה להיות סיבה לאסונות ונזקים
כמעט בכל מקום בכלי שיט שאינו מטופל טפול מונע.
שדה מגנטי H -זה המרחב שבו מורגשת פעולה של כוחות על חומרים הנקראים
" חומרים מגנטיים " .התכונה המגנטית של חומר היא הפעלת כח משיכה או דחיה של ,
חלקי חומר המכונים " דו -קוטב " מגנטי .רב החומרים המגנטים הם סוגים שונים של
מתכות .מבחינים ב 3 -סוגים עיקריים :א ) מתכות שאינן מתמגנטות ולא מושפעות
ממגנטים ,כמו עופרת ,אלומיניום ,נחושת ,כסף ,זהב ועוד .אלה נקראות מתכות " דיאה-
מגנטיות " .ב ) מתכות שמתמגנטות רק בהיותן בתחום שדה מגנטי ,אך מאבדות את
התכונה המגנטית ,כשאינן בשדה ,הן " שוכחות " שהיו מגנטיות ,אלה נקראות " פארה-
מגנטיות " .ג ) מתכות שהופכות למגנט לתקופה ארוכה ,או כמעט לתמיד ,לאחר שקבלו
את התכונה המגנטית .אלה נקראות מתכות " פרו -מגנטיות " .המכשור החיוני והנפוץ ברוב
כלי השיט ,מכיל לפחות שמוש אחד בתכונות שתוארו לעיל .
יחידת מסה מגנטית M -החלקיק הקטן ביותר של חומר ,ששמורה בו התכונה המגנטית ,
של הפעלת כח על מתכות מסויימות.
פוטנציאל חשמלי – Uaהרמה של יכולת לבצע עבודה ,עקב עודף א ו חוסר של מטענים
חשמליים .הרמה היא בנקודה מסוימת ( או " קוטב ") של שדה חשמלי וברגע מסוים .הרמה
נמדדת בנקודה aביחס לנקודה אחרת bאו ביחס ל " אדמה " ' יכולת אפס '.
מתח חשמלי – Ua-bהפרש פוטנציאלים בין שתי נקודות ) (Ua-bבשדה או במעגל של
מוליכים חשמליים .מתח מודדים ביחידות וולט VOLTSעל ידי מגע של חיישני המודד
בנקודות aו . b -אזהרה ! יכול להתקיים מתח בלי זרם ,אל תחבר את עצמך להיות
המוליך של הזרם!
זרם חשמלי – Iתנועה של מטענים חשמליים בתוך מוליך ,נמדד ביחידות אמפר Ampers
,לצורך המדידה ,יש לנתק את מסלול הזרימה ,ולחבר את מד הזרם בין קצוות הנתק .אין
זרם ללא מתח .אסור לחבר מודד זרם למדידת מתח – זה יוצר קצר!
מוליכות חשמלית– ראשית ,כאשר אומרים מוליכות ,מייד מתכוונים גם להתנגדות ולבדוד
חשמלי .היות ואין ,בטבע הרבה עובדות מוחלטות ,מה שנחשב מבודד בסדרי גודל
מסוימים עלול להיות מוליך בסדרי גודל אחרים .אומרים על חומר שהוא מוליך חשמלי ,אם
יכולה להתקיים בו תנועה של מטענים.
מבחינים בכמה סוגים של מוליכים אך נתייחס רק לשנים :א ) מוליכים מסוג ראשון ,אלה
המתכות השונות ,אשר מאפשרות תנועה של " אלקטרונים חופשיים " .ו -ב ) מוליכים מסוג
שני ,אלה תמיסות ,תערובות או תרכובות של חומרים המאפשרים תנועה פרודות
( מולקולות ) חומר טעונות במטען חשמלי ( יונים ).
קצר ונתק חשמלי – קצר הוא מצב שהמוליכות ,במסלול החשמלי קטנה או אפסית ביחס
למתוכנן .כהמשך למצב זה ,יש זרם ,שהמוליכים אינם מתוכננים להובילו ומתפתח חום ,
וכל נזק אפשרי .אם יש הגנה ,כל שהיא ,היא מנתקת את המוליך או מפסיקה את המתח,
בדרך כלל ,על ידי נתיכים ) , (Fusesהנזק שגורם הקצר יכול להוביל להתכת מוליך ,ולכן
ל נתק .בדרך כלל הקצר מספיק לגרום לנזקים בפרק זמן קצר מאד ,ולכן אסור לחדש את
ההולכה ,בלי לתקן את הסיבה ל קצר ,וחייבים לחדש את ההגנה מקצר ,רק על ידי רכיבים
שמהירות תגובתם מתאימה לתכנון .בקצור -אסור להחליף נתיך בסתם חוט מתכת כל
שהוא.
התנגדות חשמלית – היא המידה שחומר מתנגד למעבר זרם חשמלי .נגד Rהוא רכיב
אשר התנגדותו ופיזור החום ממנו תוכננו מראש ,על ידי בחירת החומרים הצורה והמידות .
קבול – קבול חשמלי הוא מצב של הצטברות מטענים בין שני מוליכים ,שיש ביניהם חומר
מבודד או ריקנות .בלשון אחרת ,אין זרימה ישיר ה בינהם ,אלא הצטברות של של מטענים
מנוגדים עד לשיוויון מספרי .קבל Cהוא רכיב שקבולו המירבי תוכנן מראש .תהליך
ההצטברות של המטענים או הפריקה שלהם מכונה זרם טעינה וזרם פריקה.
קבל טעון מהווה נתק בקו בו זורם זרם בכיוון אחד .בין שני המוליכים יש שדה חשמלי E
שערכו תלוי במתח U a-bבינהם .ערך הקיבול Cהוא היחס בין המטען Qלמתח . U
השראות – בכל עת ,שזרם חשמלי ,עובר במוליך ,נוצר סביבו שדה מגנטי .באופן הפוך
כאשר מוליך עובר בשדה מגנטי נוצר בו זרם .להשפעה ההדדית בן מוליכים ושדה מגנטי ,
קוראים השראה מגנטית .כדי לקבל את התו פעה בגדלים שימושיים מלפפים את
המוליכים לצורות שונות המכונות סלילים .המרווח בין הליפופים הוא אחד הגורמים ,
שמאפשר לתכנן סליל ל השראות , Lשרצויה לשמוש מסויים .גורמים נוספים ,שמשפיעים
על ההשראות ,הם עצמת הזרם ,קוטר הליפוף ,החומר שמעליו מלפפים ועוד.
זרם ישר – D.C.זה זרם של מטענים חשמליים ,הנעים באותו כוון ובאותו קצב .המסלול
של זרם חשמלי עובר דרך מוליכים וצרכנים שונים כדי לבצע עבודה .בכל מקרה ,כדי
שתהיה זרימה ,המסלול מתחיל ממקור ביציאה של הפוטנציאל הגבוה וחוזר לנקודה של
הפוטנציאל הנמוך ,ולכן מכנים זאת " מעגל חשמלי " .הזרם הישר -Direct Current -הוא
תוצאה של מתח ישר – שאינו משתנה בקוטביותו ורמתו .לדוגמה כל המצברים והסוללות.
זרם חלופין Alternating Current – A.C.הוא זרם אשר משנה את עצמתו וכיוונו ביחס
לזמן .המקור לזרם כזה הוא מקור מתח חילופין .השינויים בעצמה ובכוון ,בדר ך כלל ,
מתרחשים במחזוריות מתוכננת מראש .ישנם סוגים רבים ומשונים של זרמי חילופין ,והם
מקבלים כינויים שונים ,אך כדרך כלל ,מתכוונים לזרם ,שהשינויים בו הם במחזוריות
קבועה ,ומכונה תדירות הזרם או המתח .המקור לזרם חילופין נקרא " מחולל " זרם חילופין
אך זה יכול לקבל ש מות שונים כמו Oscillator,Alternator:
Generatorועוד.
תגובת הרכיבים :נגד קבל וסליל – .כאשר נגד מחובר בין שתי נקודות מתח ,אומרים
שתפקידו " להפיל מתח " ,או כשהוא מוכנס למסלול זרם אומרים שתפקידו ל " הגביל זרם ".
וככלל ,זה יהיה נכון ,הן בזרם ישר והן בזרם חילופין .תגובת הנגד היא התנגדות .
תגובות הקבל והסליל הן שונות .קבל בזרם ישר ,לאחר שמפסיק זרם הטעינה הופך
לנתק .סליל בזרם ישר לאחר שנבנה סביבו השדה המגנטי יהפך לקצר או קרוב לקצר .
בשני המקרים ברגע החיבור או הניתוק מתקבל ניצוץ; עובדה זו מוזכרת כדי להזהיר
מפעולות של ט יפול במתקנים חשמליים בסביבה של אדים או נוזלים דליקים .הניצוץ נוצר
משום שברגע הניתוק או החיבור מרווח האויר בין המגעים קטן למידה ,שהוא אינו מבודד ,
והוא נפרץ על ידי המטען של הקבל או השדה המגנטי של הסליל .הן בקבל והן בסליל יש
הולכה של זרם חילופין ,ולפי המבנה ש להם הם " מתנגדים " באופן מסויים לזרם החילופין ,
והם אינם קצר או נתק מוחלטים .כדי לאפיין את תגובתם לזרם משתמשים ביחס לקבל
ב " הגיב קיבולי " וביחס לסליל " הגיב השראתי ".
להרכב של הגיבים אלה עם נגדים קוראים " עכבת " . Impedanceבמציאות בכל אחד
משלושת הרכיבים יש מידה מס ויימת מהשניים האחרים .באופן מעשי ,כשרכיב מתוכנן
לישום ,כל שהוא ,הערכים של השניים האחרים זניחים .אך כל הכתוב לעיל בא להזהיר את
מי שאינו מוסמך ,מהחלפת רכיבים בלי להכיר את הטכנולוגיה שלהם .חוץ מהמידות
והחומרים מהם מורכבים הקבלים והסלילים הגורם המשפיע על תגובת ם הוא תדירות זרם
החילופין ,שתוגדר בהמשך.
המקרה הנפוץ ביותר ,בו יש עניי ן בעכבת ,הוא כאשר נדרשים לחבר אנטנה למכשיר
קליטה או שידור .לזוג מוליכים שמוביל אנרגיה חשמלית קוראים " קו -תמסורת" .לכל קו
תמסורת והמכשירים שמחוברים אליו יש עכבת כניסה ויציאה .על מנת להעבי ר את
האנרגיה ביעילות המירבית עכבת היציאה צריכה להיות זהה לעכבת הכניסה בחיבור
בינהם .
לדוגמה אם עכבת הכניסה לאנטנה של מכשיר קשר ימי היא 51אוהם ,אז גם הכבל
שמחבר מהאנטנה למכשיר צריך להיות עם כניסה ויציאה של 51אוהם וגם חיבור הכניסה
למכשיר צריך להיות 51א והם .
ראוי לזכור שאי אפשר למדוד את העכבת עם מכשיר המכונה אוהם -מטר ,המדידה דורשת
ידע מחוץ למסגרת של חוברת זו .עם זאת ,חשוב לזכור ,שנתן לקרא את ערך העכבת
האופיינית של כל אנטנה ,כבל או מכשיר ,על גוף המתקן ,בקטלוג או בספרות הטכנית
שלו ,וכך לרכוש רכיבים שיתאימו אחד לשני .ישנם גם רכיבים שמתאמים בין עכבות
שונות ,לדוגמה ,חלק מהאנטנות ,לקליטת ערוצי הטלויזיה ,הן בעלות עכבת של 311אוהם
וכך גם קו התמסורת השטוח שמחובר אליהן; אך בקצהו ישנו רכיב תאום
ל 75 -אוהם של הכניסה למקלט הטלויזיה .
קבול של תא או סוללת תאים חשמליים – תא חשמלי הוא מתקן ,שאגורה בו אנרגיה
חשמלית ,ובסגירת מעגל דרך צרכן ,נתן להפיק ממנו זרם ישר לזמן קצוב .את התאים נתן
לחבר כך שיתקבל מתח גבוה ,או זרם גדול יותר ,מאשר מתא בודד .את החיבור אנו
מכנים " סוללה " .אם התאים הם מסוג ,שנתן להטעינו לאחר שנוצל ,אנו מכנים אותם בשם
" מצברים " או " סוללות נטענות ".
לאחר שתא חשמלי ,או סוללה של תאים מחוברים ,הוטענו ,הצטברה בם אנרגיה ,
בצורה של מטענים ,אשר נתן להזרימה אל הצרכנים הרצויים .משך הזמן שתא או סוללה ,
יכולים לספק זרם נקוב ,במתח קבוע ,מכונה קבול המצבר .כאשר מתכננים,
או רוכשים סוללה ,למכשור כל שהוא ,לפני כל נתון אחר נרצה לדעת ,שמתח הסוללה
מתאים למתח ההפעלה של המכשור ,והיא מסוגלת לספק את כלל הזרם הדרוש למספר
שעות ההפעלה.
מתח הסוללה נקבע לפי מספר התאים שמחוברים בטור כלומר קוטב ( )+של
תא אחד לקוטב ( ) -של התא הבא אחריו .לדוגמה אם רוצים להרכיב סוללה
שתספק 12וולט ,מתאים של 2וולט ,דרושים 6תאים . 12 = 2 X 6כל תא ,לפי
כמות החומר שבו ( מידותיו ) עשוי לספק זרם מסויים לזמן מסויים; זה כאמור
מכונה " קבול התא " והוא מצויין ביחידות המכונות " אמפר -שעות " .בסוללה,
שמורכבת ממספר תאים בטור ה " -אמפר -שעות " של כל הסוללה דומה לזה של
כל תא בודד .
כדי להגדיל את ה " -אמפר -שעות " צריך לחבר תאים או סוללות במקביל .
לדוגמה :אם כל אורות הדרך של ספינה מוזנים מסוללה של 12 V
והם צורכים זרם של , 6 Aהאורות אמורים לדלוק בממוצע 8שעות .הקבול
הדרוש הוא של . 48 Ah = 8 h X 6 Aמבחינה חישובית התוצאה נכונה ,אך
מבחינה של אמינות ,לא נרצה להגיע למצב שהמצבר התפרק מכל האנרגיה
שהייתה אגורה בו ,מצברים מסוגים מסויימים עלולים להכנס למצב בלתי הפיך,
כך שלא יהיה נתן להטעין אותם ,וכן רצוי שתשאר עתודת אנרגיה לתוספת
זמן הפעלה .על ס מך נסיון מצטבר ,מקובל להפעיל סוללה ב -שליש או חצי
מ " אמפר -שעות " הנקוב על ידי היצרן .בהתיחס לדוגמה ,שלעיל ,נזדקק למצבר
של כ . 81 Ah -ישנם עוד הרבה פרטים שדרושים כדי לבחור מצבר מתאים ,אך
במסגרת פרק זה יצויין ,שלצרכי התנעת מנועים דרושים מצברים ,שמסוגלים
לתת כמה מאות אמפרים למספר שניות ,לדוגמה 311אמפר ל 11 -שניות.
11שניות הן בקרוב 1.113שעות ומזה מתבקש מצבר של כ311 A . 1.8 Ah -
יפרקו במהירות מצבר כזה ,ולכן בוחרים מצבר בקבול גדול פי כמה עשרות . Ah
המצברים לצורכי התנעה בלבד בנויים כך שתגובתם תהיה מהירה ,לשימושים
אחרים המצברים בנויים בשוני מבני ומכונים , Deep Cycleכלומר מחזור ארוך
של צריכה וטעינה.
עבודה חשמלית – " קילו -ווט -שעה " -:עבודה חשמלית מבוצעת כאשר מתח גורם לתנועה
או הצטברות של מטען חשמלי .כמות המטען החשמלי הוא המכפלה של זרם בזמן הזרימה
, Q = I x tוהמתח מסומן ב U -כך העבודה ביחידות Joulהיא . U x I x t = W
היצרנים של מכשור חשמלי מחוייבים לציין על המכשירים את צריכת הזרם שלהם,
וההספק .זאת כדי שהצרכנים יוכלו לחשב עלות והפעלה תקינה .
ההספק החשמלי – הוא העבודה החשמלית ביחידת זמן ,ונמדד ביחידות ווט .
בשימוש הנפוץ משתמשים במאות ואלפי ווטים ולכן משתמשים ב -קילו -ווטים ,
והזמן נמדד בשעות .כדי להבין את הסימונים ,ומשמעות הערכים הנקובים ,נפתח
את רצף הנוסחאות המגדירות -:העבודה U x I x t = W
U I t
W
U I P
ההספק הוא P
t
t
העבודה Wיכולה להיות P x t = Wמתצוגה זו גזורה היחידה לחישוב עלות החשמל,
שמכונה קילו -ווט שעה , KWhכלומר כמה אלפי -ווטים צרכנו במשך כמה שעות .זו גם
היחידה שמציג מונה החשמל הביתי .לחישוב העלות מכפילים את המחיר הנקוב
ל 1KWh -במספר שמראה המונה.
ומכאן
תדירות – fכאשר תופעה פיסיקלית מתרחשת במחזוריות ,כלומר ערך מסויים מופיע
במרווחי זמן קבועים ,אשר הם זמן המחזור , Tאומרים שלתופעה יש תדירות .מספר
המחזורים ביחידת זמן הוא התדירות .בעוד שמספר המחזורים יכול לקבל ערכים שונים
יחידת הזמן הנפוצה היא השניה ומקובל לסמן " מחזו רים לשניה " Cycles Per Seconds
ומסמנים . C/Sלדוגמה המתח שמספקת חברת החשמל הוא מתח חילופין
בתדירות של . 51 C/Sכלומר הערכים הרגעיים של המתח המשתנה מופיעים 51פעמים
בשניה אחת .במקום C/Sמקובל ,בתחום התקשורת ,כנוי היחידות של התדירות ב " הרץ ".
לדוגמה גלי הרדיו הם סוג של מתח חילופין ,ואם משדר מסויים מקרין מתח מתחלף
518111מחזורים בשניה מסמנים . 518 x 10 3 Hertz = 518KHZבדווח על תנאי מזג אויר
וים ,מקובל לדווח את תדירות הגלים ,על ידי מדידת מספר השניות ,שחולף מהרגע ,
שרואים פסגת גל עד שמופיעה פסגה אחרת באותו מקום .התדירות ת היה
אחד חלקי זמן המחזור המדוד .
ספקטרום ופס -תדרים – היות ויש צורות שונות של אנרגיה שמופיעות בצורה מחזורית,
חלקו את המאפיינים והשימושים לסולמות שיש להם מכנה משותף .הסולם מכונה
ספקטרום .כל ספקטרום נתן לתת -חלוקות לפי סוג הענין .מהידועים יותר הוא ספקטרום
האור הנראה – צבעי הקשת; וספקטרום הגלים האלקטרומגנטיים ( הרדיו ).
תת -חלוקה של ספקטרום מכונה פס -תדרים ,שאף הוא עשוי להיות מחולק
לתת -פסים או פסי משנה .היות ולצרכי תקשורת ,בדרך כלל ,השדורים תופשים
יותר מתדר בודד על סולם התדרים ,מקוב ל השימוש בבטוי " רוחב הפס " כלומר
ההפרש בין התדר הגבוה ביותר לנמוך ביותר הדרוש כדי להעביר מידע .
. F2-f1= Δf = Band Width=BW
ערוץ /אפיק – CHANNELהיות ותדרים גבוהים נכתבים במספר של מעל ל 6 -ספרות,
וכן ישנם שימושים שבהם משתמשים ביותר מתדר אחד בו זמנית ,מקובל בתחום
התקשורת להשתמש בכינו י מקוצר עד 3ספרות .לדוגמה בתקשורת
הימית התדר 156.525MHzמשמש לתקשורת ספרתית ומכונה ערוץ .71
ים של זויות -אגרון של מושגים הקשורים בזוויות -:
– ANGLEזווי ת = זווי ת היא ה צורה ,במישור כל שהוא ,שנוצר ת בין שני קווים ישרים
החותכים זה את זה .את היחס בין הישרים מתארים על ידי חלוקת מעגל שמרכזו בנקודת
החיתוך ,נקודת החיתוך נקראת " קודקוד הזוית " .מעתה ,כיוון = זווי ת במעגל ( המחולק
בחלוקה רציפה ל 361 1 -קרא בהמשך).
להגדרת ערך הזוית ,מחלקים את המעגל לחלוקות שונות ,לפי השימוש ,בימאות
העכשוית ,מקובלת החלוקה ל , 361 1 -החלוקה למעלות נקראת גם " חלוקה רציפה " ,ישנן
חלוקות אחרות ( חלוקה " רבעית " בנווט אסטרונומי ,וחלוקה " נקודית " -ראה פרק מצפנים
ב " עזרי נווט וקשר ") .כשהישרים אינם נחתכים ,הם חופפים בכל נקודותיהם או מקבילים ,
ובחלוקה ל 361 1 -הם במצב ,שערך הזוית , 1 1או . 361 1
כל שני ישרים ,שמשורטטים במישור ,מקיימים מצב שנתן להופכו לערך זוית .קו היחוס
הוא אחד משני הקוים שיוצרים את הזוית אך הוא קו -הראשית ,שממנו מתחילים את
המדידה כלומר ,1 1נתן להעתיק כל קו כך שתהיה לו נקודה ( קודקוד הזוית ) משותפת עם
קו היחוס .הבטוי ל " העתיק קו " או " להריץ כיוון " אומר להסיע קו במישור מבלי שישנה את
מצבו ביחס ל " קו היחוס ".
שני קוים אשר אינם חופפים ואין להם כל נקודה משותפת נקראים קווים " מקבילים "
והזוית בינהם היא . 1 1כאשר " מעתיקים קווים " במפה /במישור מבצעים פעולה של " הסעה
מקבילה " או " הסעה /העתקה במקביל ".
הצורך להסיע במקביל נובע מכך ש -א ) מישור העבודה ( המפה הימית) מוגבל בגודלו ,אם
היה מעשי לראות מישור גדול בלי גבול ,היינו רואים את נקודות החיתוך ( קודקוד הזווית )
של כל שנ י קווים מבלי להעתיק אותם ,ו -ב ) יש צורך להעתיק ערכים של זויות שונות מתוך
מעגל הנמצא במקום שונה מאזור השרטוט .
לבד מנווט ופתירת מצבים בנתוב ופנוי דרך ,נעשה שמוש בזויות ,ובחוקים של הנדסת
המישור ,גם במפרשנות ,פעולת לוח ההגה ,רתוק ושנוע מטענים .נזכור גם שקוי הר שת
הגיאוגרפית ,שמשמשת לציון אתרים על כדור הארץ ובמפות הימיות ,מקבלים את שמם
מערכי זוית 81 1 .לציון 81קוי רוחב צפונה לקו המשווה ,ו 81 1 -לציון 81קוי רוחב דרומה
לקו המשווה; וכן 181 1לציון 181קווי אורך מזרחה לקו 1 1העובר ב, Greenwich -
ו 181 1 -לציון 181קוי אור ך מערבה לקו 11העובר ב ( Greenwich -עיירה ליד לונדון ).
POSITION LINE =PLאו – LOP Line Of Positionקו אתר -קו כל שהוא שעל
אחת מנקודותיו עשוי להיות כלי השיט .הקו משורטט במפה על סמך חישוב או
מדידה במכשיר נווט כל שהוא.
קו האתר מופק על ידי קריאת זויות ו /או מדידת טווחים .הקו יכול להיות ישר ,עקום
מעגל או קשת אך חייב להכיל איפיון משותף לכל נקודותיו .יאמר כבר כאן ,שמקומו
המדוייק של כלי שיט מתקבל מהחיתוך של ( לפחות ) שני קוי אתר כל שהם ,והוא
מכונה . FIX
= TRUE NORTHצפון אמיתי /גיאוגרפי -הכיוון אליו מצביע הקו המהווה את ציר הסיבוב
של כדור הארץ ,כאשר הנקודה ממנה הוא יוצא מ ה כדור ( בחצי בו נמצאות יבשות אירופה
ואמריקה ) מוסכמת כקוטב צפוני ,וממנה מתחילה ספירת החלוקה של מעגל האופק ,1 1כל
זוית הגדולה מ , 1 1 -תתואר על ידי חיתוך של שני קוים ,אחד 1 1והשני עובר דרך נקודה
נבחרת במפה ( מרכז מעגל האופק /קודקוד הזוית בו נמצא הצופה ).
-TNהצפון האמיתי 111 1או , 361 1שהיא נקודת הראשית בחלוקת מעגל האופק .
= MAGNETIC NORTHצפון מגנטי – זה הכוון איתו יתלכד ,ואליו יצביע ,הסימון של 1 1
או 361 1או NORTHב לוח חלוקת מעגל האופק ,של מצפן מגנטי .זאת בתנאי שאין
השפעה של גופים העשויים ממתכות שהן בעלות תכונה מגנטית .ל זוית שבין הצפון
האמיתי והצפון המגנטי קוראים שגיאת הווראציה . VARIATION -ההבדל נובע מכך
שכדור הארץ הוא בעל תכונות מגנטיות שמשתנות הן מאזור לאזור והן עם חלוף הזמן.
כשה , 1 1 = VARIATION -הצפון המגנטי זהה לצפון האמיתי.
= COMPASS NORTHצפון המצפן -זה הכוון איתו יתלכד ,ואליו יצביע ,הסימון של 1 1
או 361 1או NORTHב לוח חלוקת מעגל האופק ,של מצפן מגנטי ,אך גם של כל מצפן
אחר ,אשר שגיאתו אינה נובעת משדות מגנטיים .במצפנים מגנטיים כאשר בנוסף ל-
VARIATIONישנה גם השפעה מגנטית של גופים מתכתיים במבנה כלי השייט ומטענו .
לזוית שבין צפון המצפן CNלצפון המגנטי MNקוראים דביאציה. DEVIATION -
כשה 1 1 = DEVIATION -צפון ה מצפן המגנטי זהה לצפון המגנטי .
= COMPASS ERRORשגיאת המצפן – במצפן מגנטי = הסכום האלגברי של זוית
הווראציה וזוית הדביאציה .את זוית הוראציה מפיקים מסימון או רישום באזור השייט
במפה הימית ,את זוית הדביאציה מפיקים מטבלה או גרף ,שמוכן לכל כלי שייט שהחוק
מחייבו לכך .הסכום הוא " חבור אלגברי " משום שפעמים נחסר ופעמים נסכם את שתי
הזויות .כאשר מגמתם זהה מערבה או מזרחה מהצפון נסכם את ערכן ,וכאשר מגמתן
שונה ,האחת מערבה והשניה מזרחה .נחסר את ערך הקטנה מהגדולה ומגמת התוצאה
תקבל את כינוי הגדולה מבין השתיים .נתן להפיק את שגיאת מצפן כל שהוא ( גם לא
מגנטי ) בכמה שיטות -:ישירות על ידי תצפי ת אל אתרים שמזוהים בו זמנית הן בעין והן
במפה ,או בתצפית לגורמי שמים .באופן כללי על ידי פעולה של השוואת קריאת המצפן
לתכווינים אמיתיים מהמפה הימית ( או מחושבים ומתוקנים ) ראה . TRANSIT-BEARING
-STEERING COMPASSמצפן המותקן לשמושו של ההגאי בהגה יד או ל " נתב
אוטומטי ".
-STANDARD COMPASSהמצפן התקני של כלי השייט ,זה
ששגיאתו נתנת לחשוב ,או ידועה בכל עת ( ביחס אליו בוצעה טבלת
הדוויאציה ).
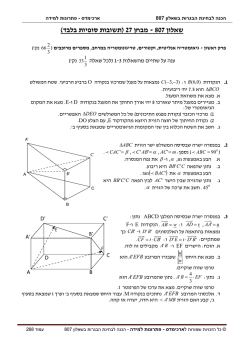
בתמונה מצפן מגנטי ,בתוך מיכל גלילי ממתכת לא מגנטית .המיכל מותקן על
גליל עץ ,אשר בהמשכ ו מחובר פריסקופ דרך הגג של חדר ההגה ( החלק החשוך ).
שני כדורי ברזל נתנים להזזה ,ובתוספת מוטות ברזל הנמצאים בתוך גליל ,בצד
המוסתר ,מאפשרים הפיכת סביבת המצפן ,וכלל כלי השייט ,לנטולת השפעה
מחלקי המתכת של מבנה כלי השייט .המצפן מוגן מהשפעות מזג אויר אך נתן
לפתוח צוהר ( העגול העליון ) ולהדליק תאורה פ נ ימית ,ועוד ישנו צנור אויר ,שפתחו
בגליל העליון בצד ימין כולל צפצפה ,זה כדי לאפשר דו שיח עם ההגאי שלמטה .
הדבור דרך צינור אויר נעשה כדרישה בטיחותית של אי -תלות בחשמל .במצפנים
אלה נתן להסיר את הכסוי העליון ולהרכיב מד -תכוויני ם לשתי מטרות :האחת
לצורך הכנת גרף או טבלת דוויאציה ,והשניה לצורך בדיקה מעת לעת או השוואה
עם מצפנים אחרים שאינם מתוקנים .
(Hand Bearing Compass) BEARING COMPASS
מצפן ( מטלטל בדרך כלל ) אשר בעזרתו נתן לקבל תכווינים מסביב למעגל האופק שלכלי השייט .
-VARאחד המרכיבים בשגיאה של המצפנים המגנטיים ,הזוית שבין הצפון המגנטי ,
שבמקום נתון על כדור הארץ ,והצפון האמיתי.
- DEVאחד המרכיבים בשגיאה של מצפנים המגנטיים ,הזוית שבין צפון מצפן -מגנטי
והצפון המגנטי במקום נתון על כדור הארץ ובכוון נתון של כלי השיט .
- MNהצפון שמורה מצפן מגנטי לאחר תיקון ה.DEV -
- CNצפון מצפן ( ,לא דוקא מצפן מגנטי ) ( ,ללא תקון שגיאות ).
-TC=True Courseנתיב אמיתי ( גיאוגרפי ) משורטט ,מופק או נתן בין שני אתרים
במפה ,הוא שוק הזוית עליה אמור לנוע כלי שיט אל יעדו .לידו מסמנים את ערך הזוית
שהוא יוצר עם הצפון האמיתי . TN
במפת מרקטור
קווי האורך
מקבילים לקו TN
- MCקורס ( זוית במעלות ) שבין MNוקו הנתיב המתוכנן של כלי השיט.
- CCקורס ( זוית במעלות ) שבין CNוקו הנתיב המתוכנן של כלי השיט.
Course To Steer – CTSהתקון ב TC -שיש לבצע כדי להגיע ליעד ,ולבטל בכך
את השפעת ה LEEWAY -ו /או ה ( CURRENT -ראה הגדרות בהמשך) .תקון זה יש לבצע
לפני תקון מצפן להגאי .כשכתוב " קורס להגוי " ראוי לברר את הכוונה :האם זה תרגום של
CTSאו הקורס לאחר תקון שגיאת המצפן = קורס להגאי ...
– HEADINGכוון חרטום ,כלי השיט ,ברגע נתון ,לא בהכרח קורס ,גם בעגינה או
במצב ללא שליטה ,ובחציה של נתיב להפרדת תעבורה .ה HEADING -יכו ל להיות אמיתי ,
מגנטי או מצפני .ה Compass Heading -הוא הנתון ( נקודת הראשית) לבנית טבלת
הדוויאציה של המצפן המגנטי ( התקני ) של כלי השיט.
) - TRACK (TRACK ANGLEהנתיב שבו נעה הספינה במים ,ואינו ,בהכרח כיוון
החרטום ( ה , ) HEADING -למטרות מסוימות שימושי להבדיל בין -:
, WATER TRACK ANGLEשמכונה גם WAKE COURSEלבין -:
GROUND TRACK ANGLEשהוא הנתיב שהיה מצטייר על קרקעית הים אילו נגעה
בה שדרת הספינה תוך כדי תנועתה .
זה מכונה גם .CMG= COURSE MADE GOOD
Course/Heading
וגם . COG=COURSE OVER GROUND
LeeWay
Wind
Water Track
Wake/Water Track
" – LEE WAYטרידה " ערך הזוית שבה סוטה הספינה מה TC -עקב רוח .הזוית נמדדת
בכוון שממבוא הרוח ( מעל הרוח ) אל הכוון של יציאת הרוח ( מתחת לרוח).
הערות ביחס לערך של זוית הטרידה -: ” LEEWAY " -
א .הרכיב של הרוח ,שמשפיע על מהירות כלי השיט " ,כלול " בערך המהירות ,שמציג
מד מהירות המודד את המהירות ביחס למים .
ב .קשה מאד למדוד בדיוק את זוית הטרידה לצורך צפי של אתר משוער , EPוזה לא
בגלל חסר בטכנולוגיה ,אלא בעקר בגלל שהרוח אינה יציבה בכיוונה ועצמתה ביחס
לזמן ,והשפעתה שונה אפילו על שני כלי שייט מאותו דגם .אחת הדרכים להעריך
את ערך הזוית היא על ידי הפנית מצפן -תכווינים אל ה " חריש במים "WAKE -
שמסמנת הספינה מאחורי ירכתיה ,והפחתת הקריאה מהערך ההפוך של הקורס .
כלומר -:
0
0
. LeeWay = (Course-180 ) - Wake Bearing 0
RELATIVE BEARING – RBהזוית במעלות שבין קו החרטום כ 111 1 -וגוף
כל שהוא בתחום האופק .מובע גם במעלות ימינה כירוק ,ושמאלה כאדום .
TRUE BEARING – TBהזוית בין TNלגוף ,כל שהוא ,בתחום האופק.
MAGNETIC BEARING -MBהזוית בין MNלגוף ,כל שהוא ,בתחום האופק.
COMPASS BEARING – CBהזוית בין CNלגוף ,כל שהוא ,בתחום האופק.
– TRANSIT BEARINGזה התכווין ,שנמדד אל שני עצמים הנמצאים על קו ישר אחד עם
הצופה ( המודד ) .היות ועל קו ישר יש שתי אפשרויות ,הקו שמתחיל מהצופה ועד לעצם
הקרוב אליו הוא זה שמכתיב את ערך הזוית .נדיר מאד לכלי שיט להימצ א על קו כזה עם
שני מגדלורים; ולא אמין לקרא תכוין כזה בין שני מצופים משום שהם מרותקים עם
שרשרות ארוכות המאפשרות לזרם להסיטם מאתרם הרשו ם .עם זאת תכווין זה המכונה
" תכווין מעבר " נתן לשמוש ,באור יום בין שני אתרים קבועים ,שמזוהים הן בעין והן
במפה .תכווין כזה נותן מייד את השגיאה הכללית של המצפן . CEכדי להגדיר את מגמת
השגיאה זכור את הכלל :אם ערך קריאת המצפן גדול מהערך המדוד במפה ,מגמת
השגיאה ה יא WESTאו . Compass Best Error Westאו אם ערך קריאת המצפן קטן
מהערך המדוד במפה המגמה היא . Compass Least Error East -EAST
– ABEAMתכווין 81 1יחסי לקו חרטום -ירכתיים של כלי השייט ברגע מסוים,
ולא בהכרח 81 1לקורס כל שהוא.
-LEADING LIGHTS/LINEכוון של קו בין שני אתרים ,או אורות ,שמטרתו להנחות כלי
שיט לנתוב במעבר צר .האור שנראה נמוך מבין השניים ,הוא הקרוב יותר ,ואליו צריך
לפנות עם חרטום הספינה כאשר רוצים לתקן סטיה מנתיב ההנחיה.
– SECTOR LINESקווים המתארים שני כיוונים המגבילים את כלי השייט לנת וב
בגזרה בטוחה כדי להמנע ממכשולים למיניהם .
-AZIMUTHמושג זה ,אינו שמושי בנווט חופי ,אך תובא כאן הגדרתו ,משום שיש
ה משתמשים בו במקום " תכווין " .ובכן האזימוט הוא תכווין מיוחד .זהוא תכווין המשורטט
במפה ( או נתן בטבלאות ) ממקומו המקורב של כלי השיט ,וב90 0 -
לקו -אתר שהופק מתצפית לגוף שמימי .ב " קו -אתר " = POSITION LINE
מתכוונים לקטע של מעגל ,שעל אחת מנקודותיו נמצא הצופה /כלי השיט.
ראה " נווט אסטרונומי ".
" = ASPECT ANGLEחזות " – בעברית מדוברת כשאומרים " האספקט של "...מתכונים
ל -איך נראה ענין מסוים בעינים של משהוא אחר מהאומר .כך גם בנושא הימי ,ה " חזות "
היא הזוית בה נראה כלי שיט אחד על ידי כלי שיט אחר .הגדרה זו שימושית בפתירת
בעיות של תנועה יחסית ,בפרט במכ " מ .
- ALTITUDEזוית אנכית /זוית גובה /רום– זוית זו נמדדת על ידי מכשיר סקסטנט ,או
בטכנולוגיה אחרת ,מעל האופק הנראה ,א ו מעל אופק מלאכותי .מדידת גובה של עצם
מעל אופק מציבה את המודד על קו שהוא חלק ממעגל סביב העצם .האזימוט מה עצם
יחתוך את המעגל באתר הספינה.
" – Doubling on the bowהכפלת זוית על החרטום "
על פי משפט הנדסת המישור ,אם בתחילת
קטע , dנמדדת זוית a 0לנקודה שמזוהה הן
בעין והן במפה ,ולאחר זמן ,מודדים זוית
ש היא ; 2 X a 0אז אתר כלי השייט יהיה
בקודקוד מש ולש שווה -שוקיים ,כל שוק
באורך , dכש d -הוא גם המרחק ,שביו שתי
המדידות.
הזווית החיצונית ,2aבמשולש שווה שוקים ,
שווה לפעמיים הזוית הפנימית . a
SET 0 +RATE /DRIFT knots =CURRENTמרכיבי זרם – כיוון במעלות ומהירות בקשרים .
הגדרה אחרונה זו ,של הזרם ,מובילה לצורך להגדיר ,כתוספת לזווית /כיוון גם את ערך
המהירות של הזרם .אנו נדרשים להגדיר גודל שחייב לכלול בו זמנית ערך ,מתוך סולם
נבחר ( מהירות בקשרים ) ,וכוון מתוך חלוקת מעגל (" שושנת רוחות ") .כפי שהוסבר
בהקדמה בסעיף .2מהירות , Velocityשייכת בתורת הפיזיקה ,לגדלים מסוג " וקטורים ".
בטרם הסברת תכונות הוקטורים והכללים שלצורך פתרון בעיות של שיט מעשי ,תוגדרנה
עוד מספר מהירויות.
מהירות התנועה של כלי שיטSPD = Vessel Speed -
מהירות כלי השיט כפי שנמדדה בין שני אתרים ( ) FIXביחידות קשר ( מילים ימיים בשעה).
מהירות כזו תהייה "מהירותו האמיתית" של כלי השיט ,בתנאי ,שההגוי היה על קו ישר ללא
גלים ,רוח או זרם .זו המהירות שהמשיט יתבסס עליה לצורך תכנון קטע או מסע שלם .זו גם
המהירות ,שקל לבדוק אותה במרחק קצר ,בתנאי ששטים הלוך וחזור מספר פעמים בין שני
אתרים ,שהמרחק בינהם ידוע.
מדי -המהירות הנפוצים מפיקים את " המהירות ביחס למים " – כלומר מהתנועה היחסית
שבין המים לחיישן של מד המהירות ,ולכן בתוצאה המוצגת כלול ות :השפעת רוח פנים או
מ אחור ,חיכו ך הקוער ,שנויים במבנה מעל המים ,ופעולות מאטות של לוח ההגה .לא
כלולה השפעת הזרם רכיב צד של הרוח ) (Leewayוהעלייה וירידה מגלים " ,תנועה
במפנים " ( בכוונים משתנים ) משום שאלה משנים את הכיוון ולכן את מה שמכונה
" מהירות ההתקדמות ליעד ".
ההתיחסות ל -מהירות כלי שיט
יכולה להבחן בשלושה הבטים :
א .בהבט של התכנון ההנדסי -מהירותו המרבית של כלי השיט ,שמאפשרים התכנון
והבניה – של -:אורך הקוער / Hull- Speed /המדחף /סוג הקוער /המבנה שמעל המים /
הדחי /המידות הכלליות בכל מישור /המנוע /המשוטים /המפרשים .
הערה :המהירות המרבית של כלי שיט ,בתלות ב " אורך -קו -המים " ( ה אורך ה מירבי תלוי
בשוקע ) LWL = Length of Water Line .נתנת לחישוב מקורב לפי הנוסחה-:
½
HULL SPEED = 1.34 X L.W.Lכש LWL -הוא אורך קו המים ביחידות רגל ( ) Feet
והתוצאה בקשרים .תחילה יש להוציא שורש ריבועי ) ½ =√ ) של LWLואז להכפיל ב. 1.34 -
ב .בהבט שבשליטתו ובחירתו של המשיט :
1. Selected Speed.
2. Cruising Speed.
3. Economic Speed.
4. Safe Speed.
5. Maximum Speed (Full Ahead).
6. Minimum Speed (Dead Slow).
7. Emergency Speed.
8. Crash Speed.
9. Maximum Reverse Speed.
ג .בהבט שהוא תוצאה של תנאי הסביבה בשלוב עם בחירתו של המשיט:
Run between two fixes (“True speed”).
Speed through the Water.
LOG Speed.
Velocity Made good/Speed Made Good.
Velocity over Ground/Speed Over Ground
Speed to Reach Destination.
Speed of Advance.
Speed/Velocity Over Ground = SOG/VOG
Speed/Velocity Made Good = SMG/VMG
המהירות בפועל ( ) Made Good/Over Groundשל כלי השייט בין שני אתרים ,כאשר ישנה
השפעת רכיבי זרם ורוח שעם התנועה או נגדה .כאשר רכיב הזרם עם התנועה =SOG
Vessel Speed + Tideונגד התנועה SOG= Vessel Speed - Tide Speed
קרא שנית פיסקת הפתיחה של הפרק ,לעיל ,מהירות התנועה של כלי השיט.
Speed to Reach Destinationו Speed of Advance -הן מהירויות שיש לחשב אותן
בנוסף לקריאת המהירות ממדידה כל שהיא .זה משום ,שהנתיב אל היעד אינו בהכרח הקו
הישר של הקורס במפה; ומכך עולות מייד השאלות :א ) באיזו מהירות מתקרבים ליעד ?
ב ) באיזו מהירות יש לנוע כדי להגיע בזמן נקוב ? מאז השימו ש ב GPS -הוא מבצע את
אגירת המיד ע ,המיצו ע והצגת התוצאות.
הערה - :אחד הנתונים ,שקשורים למהירות כ לי שיט ,הוא המרחק הקטן ביותר שיעבור ,
ממצב של מהירות מרבית עד לעצירה מלאה ( עם או בלי שלוב מדחף לאחור ).
– FIXאתר בזמן מסויים ,ובנקודת החיתוך של שניים או יותר ‘ קוי -אתר ' .האתר מתקבל
על ידי שרטוטו במפה ,או קריאתו בתצוגה כל שהיא.
-RUNNING FIXאתר המתקבל על ידי הסעה מקבילה של תכווין או טווח Transferred -
Position Lineוקבלת נקודת חיתוך עם תכווין או טווח אחר.
( – (DEAD RECKONING) DRאתר מקורב /מוקש ) אתר המופק בהקצאת הדרך ,
מהאתר האחרון ,שסומן במפה ,על הקורס המתוכנן במפה .הדרך מופקת מהכפלת
מהירות מקורבת ( , ) LOGב הפרש ה זמן ,ש חלף מ האתר ,שעודכן לאחרונה ,לשעת רשום
האתר החדש .כמובן נתן לקרא ,ישירות ממד -דרך ,שתצוגתו נרשמה בתחילת הקטע .
מבחינת " ימאות טובה " יש לעדכן את ה DR -במקרים הבאים -:
בסיום כל משמרת -ים .והרעיון הוא ,שתהיה רציפות בתעוד מקום הספינה ,למקרה
של חלופי עמדות או משמרות ( בצי סוחר כל 4שעות).
לאחר כל שנוי כיוון או מהירות.
לאחר כל הפקת אתר FIXאו . RUNNING FIX
לאחר כל הפקה ושרטוט של קו אתר כל שהוא ( . ) LOP Line Of Position
520 5
DR/FIX
11
11
אורך /משך זמן המסע
קריאת מד דרך 20מילים ימי ים
אתר רשום בתחילת משמרת בשעה
או -:
קריאת מד מהירות ( לדוגמה 5קשר ) Xהפרש הזמן ( בדוגמה
DR
סיום משמרת
11
14
4 = 11 11-14 11שעות )= 21מיל .
ובמפה -:
21מיל
צפון המפה
-:רשימה של הסימוני ם הבסיסיים והמקובלים בעבודת מפה
True Course
Compass Course
or
090 0 T
Compass/Magnetic/True
Course Over Ground
Water Track
Ground Track
Tidal Stream
or Current
Position Line (Line Of Position= LOP)
or
Transferred Position- Line
or
also for
Bearings
Range Position- Line
Clearing- Line
NL 085 0 C
Not Less 085 0 Compass
Dead Reckoning Position = DR
Estimated Position = EP
or Electronic instrument Position
FIX
RADAR Position
. ספרות4 -ליד כל סימוני תכווינים ואתרים חובה לרשום את השעה ודקות ב
בקשר למהירות כלי. שהם זוויו ת או קשורים לזווי ת, עד כאן הוצגו מושגים והגדרות
אך בגלל חשיבותו ל מושגי ההמשך, אף הוא קשור בזוית, אוזכר המושג וקטור, השייט
.תובא תמצית להסבר השימוש בו
' איחוד כוחות ' -ו וקטור -ופעולות מתמטיות ב ווקטורים .
וקטור במהותו הוא סמל ,שמאפשר תאור כמותי של כוחות על דף כתיבה .תאור כמותי ,לא
רק כמספר יחידות ,אלא בתוספת מאפייני ם אחרים .הווקטו ר מסומן בצורה ●
צורה זו כוללת את המרכיבים הבאים -:
. 1נקודת אחיזה ● שבה " אוחז " ה ו וקטור את הגוף עליו הוא פועל.
אשר לאורכו פועל הכו ח באחד הכיוונים .
. 2קו פעולה
. 3כיוון ,כל שהוא ,שאליו דוחף או מושך הכ ו ח .
. 4מספר היחידות הכלולות באורכו מנקודת האחיזה עד קצה חץ הכיוון .לדוגמה אם
אז 5קמ " ש יהיו
יחידת מהירות של 1ק " מ בשעה תהיה
מוסכמות יסוד ביחס לפעולת כוחות המסומנים כוקטורים באותו מישור או מרחב-:
א .קווי הכו ח אינם חותכים זה את זה.
ב .נקודת האחיזה פועלת על חומר או גוף קשיח .הדיון של השפעת כוחות על חומרים
רכים הוא מחוץ למסגרת זו ,אך אפשר להתייח ס לכל חלקיק ,של גוף רך ,כקשיח .
ג .נתן לה סיע את מקום הווקטו ר לאורך קו הפעולה שלו ,אחורה וקדימה.
ד .נתן להעתיק במקביל את קו הפעולה ,לכל מקום משני צדדיו ,של קו הפעולה.
ה .נתן לפרק וקטור ל רכיבים ,ונתן להרכיב מספר וקטורים לווקטו ר שקול אחד .בלשון
אחרת ,אפשר לבצע ,פעולות מתמטיות שונות עם וקטורים ,אך לנדרש כאן ,מספיק
היד ע של חיבור וחיסו ר של וקטורים שפועלים על אותו גוף .פעולות אלה חיוניות
להבנת המושגים והפרקים ,שבהמשך ותלמדנה להלן .
אילו " גדלים וקטורים " פוגשים בנושאי הספנות ? בהכללה התשובה היא כל הסוגים ,
משום שכל טכנולוגיה חדישה קיימת במבנה ובמכלולים של כלי שייט .אך אלה השגורים
ביותר הם -:
וקטור מהירות כלי שייט ביחידות של קשר = מייל ימי בשעה לדוגמה .
וקטור מהירות הרוח ביחידות של קשר = מייל ימי בשעה לדוגמה.
וקטור מהירות ה זרם ביחידות של קשר = מייל ימי בשעה לדוגמה.
וקטור כוח הדחף של להב מדחף המנוע.
וקטור כוח הלחץ של לוח ההגה ,ידיות ומנופים לסוגיהם .
וקטור כוח הקידום של מפרש.
וקטור כוח ההתנגדות לסטיה של קוער הספינה או ה " חרב " ). (Centerboard/Keel
הוקטורים בציר הסיבוב ומרכז הלחץ של מבנה כלי השייט ,אשר יוצרים מומנט סיבוב ,אם
אינם על אותו קו אנכי למשור התנועה.
וקטור כוח המתיחות של חבלים כבלים ושרשרות.
וקטור של כוח ציפה ,דחי והתנגדות לתנועת מים.
כמו בן ישנם עוד רבים ,אך גם רשימה זו ארוכה מההתייחסות שדרושה בשגרת השיט.
פעולות החישוב והפתירה ,שבין שני וקטורים ,מובאות ב עקר לצורך עבודת מפה ,שהיא
השימוש הנפוץ ביותר ,וכמעט היחיד ,אשר א ליו ידרש משיט ספינה.
בעיה – 1חבור שני וקטורים על אותו קו פעולה.
כלי שייט נע ,על קורס נתון ,בכח מנוע במהירות 7קשר; מאחוריו מתחילה לנשוב רוח
במהירות 15קשר ,והיא גורמת לתוספת מהירות של 3קשר .יש להבין ,שראשית 15 -:
קשר ,של מהירות הרוח ,אינם מוסיפים 15קשר למהירות ספינת מנוע ,ואף לא לספינת
מפרש .שנית -:אין דרך מדוייקת ,להעריך מראש את התרומה של הרוח למהירות ,אלא על
ידי מדידה חוזרת .מסיבות אלה הבעיה ,כאילו פתורה מראש ,בעצם קריאת מד המהירות
של הספינה .לצורך פתרון כללי של חבור שני וקטורים על אותו קו פעולה מה שנעשה הוא-
3קשר 7 +קשר
הסכום = " ה וו קטור השקול "
= 11קשר
הערה :השימוש במלה " שקול " בא ל מקרה ,שהוקטורים אינם על אותו קו פעולה ,כשאז
התוצאה אינה סכום אלגברי פשוט ,אלא " סכום וקטורי " כפי שנראה בהמשך.
בעיה – 2חיסו ר שני וקטורים על אותו קו פעולה.
כלי שייט נע במהירות 5קשר ביחס לקרקע ,ונכנס לאזור שבו רכיב הזרם הנגדי הוא 1.5
קשר .לכאורה גם כאן היה מספיק לקרא את התצוגה של מד המהירות .אך רוב מדי
המהירות ,הנפוצים בכלי שייט ,מציגים את המהירות ביחס למים ולא ביחס לקרקע .באופן
כללי ,החסור מבוצע על ידי הקצאת הווקטו ר המחסר ,מקצהו ועל הוקטור המחוסר .
1.5קשר
5קשר
השקול יהיה 3.5קשר
בכוון התנועה.
3.5
בעיה 2א – זרם נגדי לתנועת הספינה.
במקרה שהמחסר גדול מהמחוסר ,לדוגמה מפרשית שנעה ברוח חלשה במהירות של 3
קשר ,ביחס לקרקע ,ובזרם נגדי של 3.5קשר.
3קשר
ההפרש השקול הוא 1.5קשר
בכוון הזרם ,כלומר הפוך לקורס,
כך שהספינה נעה לאחור ביחס
למטרתה.
3.5קשר
בעיה 2ב -מדידת מהירות הרוח תוך תנועת הספינה.
בעיה זו מוצגת ,כדי למנוע בלבול בין קריאת מהירות הרוח ובין השפעתה על מהירות כלי
השייט ביחס לקרקע.
ישנו מבחר גדול של מכשירים המשמשים למדידת מהירות הרוח ,לכן ,לצורך הדוגמה כאן ,
נתייחס לאותם דגמים בהם וקטור מהירות הרוח פועל על גל גל כנפיים ,מסוג כל שהוא .
הבעיה היא למצו א מה תהיה קריאת מד הרוח ,כאשר הספינה בתנועה ? אנו מניחים ,
שמד -הרוח מגיב לווקטו ר מהירות הרוח שעל קו התנועה של הספינה ,כלומר גם אם הכוון
הכללי של הרוח נמצא בזוית לקו זה ,אנו מתחשבים רק ברכיב שמוסיף או גורע מקריאת
מד – מהירות הרוח.
הערות הרחבה ביחס לבעיות 1ו-: 2 -
לצורך פתרון 1ו 2 -ה סע נו ,לאורך קו -הפעולה ,את נקודת האחיזה של וקטור אחד אל קצה,
חץ הכיוון ,של וקטור שני .לדוגמה בחיסו ר A-B
B
ההפרש C
A
כמו כן ,כשרוצים לקבל את השקול במקום מסוים ,על דף או במפה הימית ,מותר להעתיק,
ולאחד לקו אחד ,קוו י פעולה ,של וקטורים הנמצאים על קווי פעולה מקבילים ( ,הזוית
העתקה במקביל הסעה השקול
בינ י הם היא . ) 1 1
לדוגמה הרכבת שני וקטורים :
שלבי החיבור
וקטור 1
+
2+1
וקטור 2
במפה הימית ההעתקה במקביל וההסעה לאורך קו הפעולה מבוצעת במספר שיטות
ובעזרת מבחר מכשירים ,אך הנפוצים ביותר הם מחוגה וסרגל -מקביל ,או זוג משולשים .
נדרשת תשומת לב מיוחדת ,כשמתבקשים לפתור בעיות של מציאת מהירות הרוח ,על כלי
שייט בתנועה ,ו השפעת מהירות הרוח על מהירות כלי השייט -:
א ) מהירות " רוח הפנים " של כלי שייט זהה למהירותו וכיוונה מנוגד לכוון
תנועתו ,וניתנ ת למדידה כאשר אין רכיבי רוח אחרים.
ב ) רוח עם כוון תנועתו של כלי שייט אינה תורמת את מל ו א מהירותה למהירות
כלי השייט גם לא במפרשית .
בעיה – 3הרכבה של שני ו וקטורים ,שקווי הפעולה שלהם אינם מקבילים ,כלומר ה זוית
בינם שונה מ . 1 1 -קיימות מספר שיטות להרכבה או פרוק של וקטורים ,שאינם מקבילים ,
יש ומכנים אותן בהכללה תחת השם " חיבור וקטורי " ,גם אם מבצעים פעולת חיסור או
פרוק .ישנן שיטות " חישוביות " הנותנות ערכים מספריים של יחידות וכיוון ; יש שיטות
שהן " שירטוטיות " ( גראפיות ) וישנן שיטות שהן שילוב של חישוב ושירטוט .לצורך
ההסברים שקשורים לעבודת מפות ותנועת כלי שייט נפוצות השיטות השירטוטיות ,שהן
שתיים :א ) שימוש במערכת צירים ישרת זווית ( ציר Xאופקי וציר 81 1 Yלציר .) X
ב ) שיטת " מ קבילית הכוחות " ,אשר היא מעין קצור דרך של שיטה ( א ) .נאזכר שנית ,
ש הדיון מותנה בחמש מוסכמות היסוד ,שבתחילת הפרק ,ובעקר לכך שאנו מתייחסים
לפעולת וקטורים על גופים קשיחים .
שיטה א -מערכת צירים ישרת זווית.
נתונים וקטור A
ווקטור B
שלב ראשון נשרטט מערכת ישרת -זווית במקום ( על הנייר או המפה ) ,שבו דרושה
התוצאה ,ונעתיק את הוקטורים ל " נקודת הראשית " ( נקודת החיתוך שבה 1 = Xו .) 1 = Y
Y
רבע Xחיובי ו Y -שלילי
רבע Xשלילי Yחיובי
X
רבע Xחיובי Yשלילי
רבע Xשלילי Yשלילי
שלב שני ,נבצע פעולת " הטלה " של כל וקטור על צירי המערכת ,כלומר כל נקודה של כל
אחד מהוקטורים תוטל הן על ציר Xוהן על ציר . Yהיות ויש אין -סוף נקודות ,מסתפקים
רק בחלוקה ,שמספקת את הדיוק השימושי.
Y
רבע Xשלילי Yחיובי
רבע Xחיובי ו Y -שלילי
X
רבע Xשלילי Yשלילי
רבע Xחיובי Yשלילי
שלב שלישי נניח ,שהאדום מייצג מהירות כלי שייט ,בקשרים וכיוון במעלות ביחס ל, Y -
והכחול מהירות וכיוון זרם באותן יחידות .ערך הזוויות מקורב ,רק לצורך ההדגמה.
Y
רבע – Xו Y +
רבע X +ו Y +
45 0
X
231 1
רבע X +ו – Y
קבלנו + 7יחידות של הכחול על ציר ה X
ו -5,5של האדום ,והסכום האלגברי הוא
+7 – 5,5 = +1,5כלומר 1,5על ציר ה. X +
רבע – Xו – Y
שלב רביעי
Y
רבע – Xו Y +
רבע X +ו Y +
X
רבע – Xו – Y
רבע X +ו – Y
ישנן + 6יחידות של הכחול על Y +
ו -12יחידות של האדום והסכום האלגברי
יהיה +6 -12 = -6כלומר 6 -על ציר . Y -
שלב חמישי הווקטור שווה הערך ,ה " שקול " ,לרכיבים האדום והכחול ,שהתקבל מהשלבים
הקודמים , ,יהיה החץ הירוק.
Y
רבע – Xו Y +
רבע X +ו Y +
זווית הכיוון של כלי השייט = α + 81 1
81 1
+1.5
X
α
רבע – Xו – Y
רבע X +ו – Y
-6
בעבודת מפות ,מודדים עם מחוגה את מספר
יחידות האורך על סולם היחידות של המפה,
ובעזרת מד זווית את הכיוון ביחס לצפון ( ציר .) Y
שיטה ב – חישוב במשולש ישר ז ו וית
לקוראים ,שיודעים את הדרך החישובית ,מספר היחידות מהן מורכב הווקטור ( הירוק )
,הפעולה היא של חישוב
=
=
מתקבל מהחישוב = 6.2 -:
אורך היתר ,במשולש ישר זווי ת ,על סמך משפט בהנדסת המישור ,הקרוי " משפט
פיתגורס " .במקרה ,שדנים במהירות בים ,היחידות הן " קשר " וכותבים . 6.2knots
ו את הז ו וית αנמצא מתוך ? = ( tan. αטנגנס של זווי ת ,במשולש ישר זווי ת ,הוא היחס
המספרי שבין הניצב שמול הזוית והניצב שסמוך לזווי ת ).במקרה שבדוגמה 6 : 1.5 = 4
ומתוך לוח ,או מחשבון ,מוצאים שעבור tan. α = 4מקבלים . α = 76 0היות ובמפה הימית
כיוון כלי שיט נמדד מהצפון ( ציר ה ) Y -עם כיוון השעון ,כיוון כלי השייט במקרה שבדוגמה
הוא . 90 0 + α = 90 0 + 76 0 = 166 0ובמפה הימית מסמנים -:
166 0 /6.2kts
לפי אחת המוסכמות ,מסמנים את הקורס מעל הקרקע COGבאדום אך מקובל כל סימון,
שיאזכר את העובדה ,שאין זה הקורס המתוכנן ,אלא תוצאה של השפעת הזרם .
Y
1.5
X
α
6
מעתיקים את השקול למקום הספינה
במפה הימית ומעתה הוא " הנתיב
0
בפועל " ) מעל ה קרקע COGאו 166 /6.2kts ) CMG
הערה :ערך הזוית מחולץ מתוך ה tan. -היות ופונקציות sin.ו cos. -תלויות בערך המחושב של היתר ,
ש עלול להיות שגוי ,שלא כמו ה , tan. -שמוגדר מתוך ערכים נתונים ,של הניצבים .
שיטה ג " מקבילית הכוחות " -:
זו השיטה השרטוטית הנפוצה ב " מפת מרקטור " ,אשר ב ה קווי האורך מאונכים לקווי
הרוחב ,ולכן באים במקום המערכת ישרת הזווית של Xו . Y -כך ,כל אתר במפה הוא
" נקודת ראשית " או " נקודת הפתרון " במערכת ישרת זווית .ובאופן מיידי נתן להגדיר כל
נקודה ,כנקודת החיתוך של קו רוחב עם קו אורך שנמדדו עם סרגל ומחוגה ללא כל
חישוב .היות ולכל מפה ישנו קנה -מידה ,שלפיו היא שורטטה ,משתמשים ביחידות האורך
של המפה לשרטוט גודלם של הווקטורים ,בכך אין צורך להעתיק את הווקטורים ל נקודת
הראשית של מערכת שמשורטטות בה היחידות ,ו בהמשך לנצל את תכונות הצורה
ההנדסית המכונה " מקבילית " .ההגדר ה הכללית של צורה זו היא -:מצולע בעל ארבעה
הצורות ריבוע ,מלבן ומעוין הן
צלעות ,אשר כל שתי צלעות נגדיות מקבילות.
מקרים מיוחדים של מקבילית ,עם אותן תכונות .
כהערת הקדמה יאמר ,שהשימו ש במקבילית אינו המצאה ,בפני עצמה ,אלא שימו ש ש גזור
משתי השיטות הקודמות ,ומהוות מעין " קיצור דרך " המסתמך עליהן .על ידי סימון צלעות
המקבילית והאלכסונים כ ו וקטורים ,נתן לבצע את פעולות החיבור והחיסור שבין גדלים
ווקטורים מבלי להעתיק אותם לנקודת הראשית של מערכת ישרת זווית .פעולה זו הופכת
את המקבילית למה שמכונה " מקבילית הכוחות ".
לדוגמה כלי שיט שמסומן במפה 090 0 7kts
נמצא באזור בו פועל זרם
225 0 3kts
כ ש הדרישה היא למצו א את השקול ,שיתאר את תנועת כלי השייט בפועל .הפתרון לזה ,או
לכל הרכבה אחרת של שני וקטורים :מסיעים את אחד הוקטורים או את שניהם למקום בו
דרוש הפתרון ,ומקצים בקצהו של האחד את נקודת האחיזה של השני כהמשכו.
מתקבלת " מקבילית כוחות " ,שהאלכסון הקצר שלה ( האדום ) הוא הווקטור השקול
המבוקש .רואים מייד שנתן להזניח את ציור המקבילית ,ולהסתפק בסגירת " משולש
הכוחות ".
אם הזרם היה -:
045 0 3kts .
השקול י היה האלכסון הארוך של המקבילית ,בלשון אחרת ,הצלע שמשלימה למשולש .
הערות והארות חשובות :
. 1הרכבה ופרוק וקטורים ,בהקשר של " עבודת מפה " ,נעשה עם יחידות מהירות של
קשר ,כלומר מיל ימי ב 1 -שעה ,זה אומר ,שכל הווקטורים מייצגים שעה אחת של
מסע כלי השייט ,ויש לשמור על קנה מידה אחיד של כל המרכיבים ,בייחוד כאשר ,
לבהירות השרטוט ,מכפילים ,או משלשים את ,גודל היחידות .לאחר מציאת פתרון ,
יש לחזור לקנה המידה של המפה.
. 2השאלה ,שמתבקשת מיידית לאחר מציאת ה " נתיב ב פועל " ,שבהשפעת הזרם ,היא
איך למצוא את הווקטור ,שייצג את תנועת כלי השייט כדי ש" בפועל " ימשיך לנוע
בנתיב אל היעד .בלשון אחרת " יתנגד לזרם " . Allowing for current ,בספרות
ההדרכה ושאלוני בחינות ,הבעיה מוצגת כמציאת הCTS = Course To Steer -
( השלמות בשלבי הכנה )











© Copyright 2026