
חשבון אינפיניטסימלי מתקדם 80316 II
חשבון אינפיניטסימלי מתקדם 80316 II אור דגמי[email protected] , 21ביוני 2012 1 אתר אינטרנטhttp://digmi.org : סיכום הרצאות של פרופ׳ ארז לפיד בשנת לימודים 2012 נושאים לקורס .1המרחב ).C (K .2קירוב ע״י פולינומים ,משפט Stone-Weirstrass .3מרחבי מכפלה פנימית .4טורי פוריה ־ Fourier series .5נושאים נוספים... עוד קצת מנהלות בהנחה שהשביתה תפתר במהרה :יהיו 13תרגילים להגשה שיקבעו 15%מהציון הסופי )ממוצע של 10התרגילים הטובים ביותר( ו 85%הבחינה. ספר לינדנשראוס ־ אינפי מתקדם א׳. שעת קבלה ־ יום ג׳ 13־12ץ תוכן עניינים 2 חלק I המרחב )C (K 3 פרק 1 מבוא 1.1טעימה קלה הדגש קורס הנ״ל יהיה אנליזה פוקציונלית .הדגש הוא לא על פונקציה מסויימת והתכונות שלה אלא על מרחבי פונקציות ומרחבים נורמיים כלליים. הדוגמה הכי בסיסית למרחבי פונקציות אשר כבר ראינו: יהי Kמרחב מטרי קומפקטי ,נתבונן במרחב פונקציות )) C (Kמרחב הפונקציות הרציפות מ Kל .Rאנו יודעים כי כל פונקציה כזאת היא אוטומטית חסומה )משפט ויירשטראס( ואנו יכולים להתבונן בנורמה: |)kf k∞ = sup |f (x)| = max |f (x x∈k x∈K ) C (Kהוא מרחב נורמי ביחס ל ∞ . k·kוזהו מרחב נורמי שלם. מה זה מרחב נורמי שלם? ראשית כל נורמה מגדירה מטריקה .d (x, y) = kx − yk∞ :ושלם :כל סדרת קושי מתכנסת )לדוגמה Q היא לא שלמה ,כיוון שלא כל סדרת קושי מתכנסת בה ,אבל Rכן(. מה זה התכנסות ב ) ?C (Kנאמר ש fn → fאם״ם kfn − f k∞ → 0 :וכמובן שזה אם״ם לכל ε > 0קיים n0כך שלכל n > n0 במ״ש ∀x ∈ K |fn (x) − f (x)| < εכלומר. fn −→ f : 1.2 קומפקטיות הגדרה 1.2.1קומפקטיות :בהינתן המרחב המטרי ) (X, dנאמר ש Xקומפקטי ⇒⇐ לכל סדרה יש תת סדרה מתכנסת⇐⇒ . Xשלם וחסום לחלוטין )כלומר ,לכל ε > 0יש ε־רשת סופית( ⇒⇐ לכל כיסוי פתוח של Xיש תת־כיסוי סופי. מה זה εרשת? קבוצה של נקודות x1 , . . . , xnכך ש ) Bε (xi n S =.X i=1 מסקנה 1.2.2 .1אם ) (X, dמרחב מטרי שלם Y ⊆ X ,קומפקטית יחסית )כלומר Yקומפקטי( אם״ם Yחסומה לחלוטין. Y ⊆ X .2קומפקטיים ⇒⇐ Yסגורה וחסומה לחלוטין. הערה 1.2.3עבור Rnעם המטריקה האוקלידית )או באופן יותר כללי עבור מרחב נורמי סוף מימדי( כל קבוצה חסומה היא חסומה לחלוטין. לעומת זאת במרחב נורמי ממימד אינסופי הדבר אינו נכון .למה? נתבונן בקבוצה החסומה הבסיסית ביותר ) B0 (1נבחין כי היא אינה קבוצה חסומה לחלוטין .הסיבה לכך היא )לא הוכחה( :אם נתבונן ב Rnבשביל לכסות את כדור היחידה ב Rnע״י כדורים ברדיוס 21צריך לפחות 2nכדורים )משיקולי נפח( .לכן ,במרחב אינסוף מימדי לא ניתן לכסות את כדור היחידה בעזרת מספר סופי של כדורים ברדיוס ) 12או באופן יותר כללי :כל רדיוס הקטן מ(1 4 5 אובמ 1.קרפ נרצה לשאול ,מתי קבוצה ) A ⊆ C (Kהיא קומפקטית\קומפקטית יחסית? כלומר ,מתי Aחסומה לחלוטין? במילים אחרות ,מתי לכל סדרה fn ∈ Aיש תת־סדרה מתכנסת )במ״ש(? נבחין כי Aחסומה ⇒⇐ קיים Rכך ש kf k∞ ≤ Rלכל .f ∈ Aכלומר|f (x)| ≤ R : ) ∀x ∈ K, f ∈ Aחסימות במידה אחידה( איזו סדרה של פונקציות אנו מכירים שלא מתכנסת במידה שווה? דוגמה 1.2.4נתבונן בפונצקיה הבאה בקטע ]:K = [0, 1 0 ≤ x ≤ 1n nx fn = 2 − nx n1 ≤ x ≤ n2 0 x > n2 ברור כי נקודתית fn (x) −→ 0לכל ] x ∈ [0, 1אבל אין תת סדרה מתכנסת ב ) C (Kמכיוון ש ,kfn k = 1כלומר ,אין תת סרה ∞→n מתכנסת ל 0במ״ש. כלומר } A = {fnלא קומפקטית יחסית )ב )](C ([0, 1 1.3 רציפה במידה אחידה הגדרה 1.3.1רציפה במידה אחידה :נאמר שמשפחה ) F ⊆ C (Kהיא רציפה במידה אחידה אם לכל ε > 0קיים δ > 0כך ש: dK (x, x′ ) < δ ⇒ |f (x) − f (x′ )| < ε ∀f ∈ F הערה 1.3.2נבחין כי זו למעשה רציפות במידה שווה אם Fהיא רק פונקציה אחת .כלומר אנו דורשים רציפות במידה שווה של פונקציות ב f ∈ Fכך שאותה δ > −עובד באופן אחיד לכל ה .f ∈ F הערה 1.3.3המונח באנגלית הוא Equicontinous family :־ ריצפות במידה אחידה )של משפחה( ואילו־ Uniformly continous־ ריצפות במ״ש. דוגמה = F 1.3.4משפחת הפונקציות הקבועות על ,Kהיא כמובן רציפה במידה אחידה. דוגמה 1.3.5 } fליפשיץ עם קבוע ≥ F = {f ∈ C (K) | 100 כלומר: ) |f (x) − f (x′ )| ≤ 100dK (x, x′ זה יהיה משפחה רציפה במידה אחידה עבור ε 100 ∀f ∈ F = .δ באופן כללי יותר: }) {f ∈ C (K) | |f (x) − f (x′ )| ≤ cd (x, x′ α>0 c>0 ∀ פונקצייות המקיימות את תנאי הולדר. טענה 1.3.6 מרחב מטרי Xהוא קומפקטי אם״ם Xשלם וחסום לחלוטין )לכל ε > 0אפשר לכסות את Xע״י מספר סופי של כדורים ברדיוק (ε 6 אובמ 1.קרפ הוכחה ⇐ :תרגיל. ⇒ מספיק להראות שלכל סדרה } {xNב Xיש תת סדרה שהיא סדרת קושי) .טיעון אלכסון( נתחיל מסדרה הנתונה } ,{xnנקח כיסוי של Xע״י מספר סופי של כדורים B1 , . . . , Bkברדיוס .1 )(1 נבחר תת סדרה של } yn ,{Xnשמוכלת באדת מה Bi־ים נקרא לו ).D(1 )(2 עכשיו ניקח כיסוי של Xע״י מספר סופי של כדורים ברדיוס , 12נבחר תת סדרה ynשל ynהמוכלת באחד הדכורים הנ״ל ).D(2 1 m נמשיך בתהליך כאשר בשלב הm־י נכסה את Xע״י מספר סופי של כדורים ברדיוס באחד הכדורים נסמנו.D(m) : כלומר נחזור על התהליך לכל ) mאנו משתמשים באקסיומת הבחירה כמובן( .נקבל אוסף של סדרות: ... )(1 ... )(2 ... )(3 y3 )(1 y3 )(2 y3 .. . )(3 y2 )(1 y2 )(2 y2 .. . )(3 ונבחר תת סדרה )(m ynשל )(m−1 ynהמוכלת y1 y1 y1 .. . מסתכל על הסדרה הנוצרת מהאלכסון הנ״ל )בגלל זה טיעון האלכסון(: )zn = yn(n znהיא תת סדרה של } zk ∈ D(n) .{xnלכל ) k ≥ nכי )(k 2 ) min (m, m′ zk = ykו )(k ∗ yהיא תת סדרה של )∈ D(n ≤ ) d (zm , zm′ )(n ∗ (yולכן: ∀m, m′ ) min(m,m 2 כי . min(m,m zm , zm′ ∈ Dובגלל שזה מרחב מטרי ,הקוטר של כדור הוא פעמיים הרדיוס ולכן המרחק בניהם לא עולה על ) ′ ולכן znהיא סדרת קושי. ′ נחזור שוב על הגדרה של רציפה במידה אחידה: הגדרה 1.3.7בהינתן Kמרחב מטרי קומפקטי .נאמר שמשפחה ) F ⊆ C (Kנקראת רציפה במידה אחידה אם לכל εקיים δ > 0 כך ש d (x, x′ ) < δאזי∀f ∈ F |f (x) − f (x′ )| < ε : דוגמה 1.3.8נתבונן ב ] K = [a, bנתבונן במשפחה: }i = 1, . . . , n |ai | ≤ 2012, n F = {p (x) = a0 + a1 x + . . . + an x | n ≤ 10, רציפה במידה אחידה. נבחין כי זו למעשה משפחה של פונקציות ליפשיציות עם קבוע ליפשיץ חסום ,ולכן ראינו כבר כי היא רצפה במידה אחידה כיוון שפונקציות ליפשציות עם קבוע חסום הן רציפות במידה אחידה. מאידך ,המשפחה } {cx | c ∈ Rשל הפונקציות הלינאריות ב ] [0, 1אינה משפחה רציפה במידה אחידה ) cאינו חסום ,לכן קיימת פונקציה עם נגזרת גדולה כרצוננו(. ∞ דוגמה {xn }n=1 1.3.9עבור הקטע ] ,K = [0, 1נבחין כי: 0≤x<1 x=1 0 1 ( →xn − ∞→n נבחין כי היא מתכנסת לפונקציה לא רציפה ,ולכן היא לא תהא רציפה במידה אחידה כפי שנראה בקרוב .אבל אפשר גם לראות את זה ישירות )כתרגיל(. הערה 1.3.10הגדרנו רציפות במידה אחידה ,אבל נבחין כי ההגדרה הנ״ל בעצם לוקחת את המושג של רציפות במידה שווה והופכת אותו לאחידה כלפי המשפחה .כלומר כפי שכבר ציינו אם } F = {fאז היא רציפה במידה אחידה אם״ם fרציפה במ״ש. מצד שני ,אפשר להגדיר רציפות של משפחה בנקודה ) a ∈ Kכלומר ,לכל ε > 0קיים δ > 0כך שאם d (x, a) < δאז .(∀f ∈ F |f (x) − f (a)| < ε אותה הוכחה שמראה שכל פונקציה ב) C (Kהיא רציפה במידה שווה מראה שאם Fמשפחה רציפה במידה אחידה ב a ∈ Kלכל נקודה a ∈ Kאז Fמשפחה רציפה במידה אחידה ב Kבמובן הקודם. 7 אובמ 1.קרפ 1.3.1 Arzela-Ascoli משפט Arzela-Ascoli 1.3.11 תהי ) F ⊆ C (Kאז Fקומפקטית יחסית אם״ם Fחסומה ב )) C (Kכלומר אחידה( ורציפה במידה אחידה. הערה 1.3.12באופן שקול ) F ⊆ C (Kקומפקטית אם״ם Fסגורה וחסומה ורציפה במידה אחידה. ✞ ☎ אחידה. במידה רציפה F ⇐ אחידה במידה רציפה F אם תרגיל: ✝ ✆ הוכחה ⇐ :נניח ש Fקומפקטית יחסית ,ברור ש Fחסומה .יהי ,ε > 0כיוון ש Fחסומה לחלוטין ,קיימות f1 , . . . , fn ∈ Fכך שלכל f ∈ Fקיים iכך ש .kf − fi k∞ < ε :אנו יודעים כי f1 , . . . , fnרציפות במ״ש ,לכן קיים δ > 0כך ש: d (x, x′ ) < δ ⇒ |fi (x) − fi (x′ )| < ε לכל .i = 1, . . . , nנעשה את הטריק הרגיל של חלוקה ל ,3לכל f ∈ Fנבחר את ה iכך ש kf − fi k < εנקבל לכל x, x′ ∈ Kכך ש :d (x, x′ ) < δ |) |f (x) − f (x′ )| ≤ |f (x) − fi (x)| + |fi (x) − fi (x′ )| + |fi (x′ ) − f (x′ {z | } {z | } {z } | <ε <ε <ε השמאלי והימני כי ,kf − fi k∞ < εהאמצעי כי fiרציפה במידה אחידה .ולכן: < 3ε ⇒ אם Fרציפה במידה אחידה וחסומה נרצה להראות כי אז Fחסומה לחלוטין) .ולכן קומפקטית יחסית בתור תת־קבוצה חסומה לחלוטין במרחב מטרי שלם( יהי ,ε > 0נבנה εרשת סופית ל .Fיהי Mכך ש ) ∀f ∈ F , x ∈ K, |f (x)| ≤ Mכי Fחסומה ב ) C (Kלפי הנחה(. יהי δ > 0כך ש: d (x, x′ ) < δ ⇒ |f (x) − f (x′ )| < ε ∀x, x′ ∈ K ∀f ∈ F m = Mב.[−M, M ] : נבחר δ־רשת x1 , . . . , xnב Kוε :־רשת y1 , . . . , ym ,למשל ε נבנה רשת Nבאופן הבא :לכל ) (m1 , . . . , mnכאשר ) 1 ≤ mi < mהאינדקסים של ה εרשת שהגדרנו בשורה להעיל( .אם קיימת f ∈ Fכך ש |f (xi ) − ymi | < εלכל i, 1, . . . , nאז נבחר f(m1 ,...,mn ) ∈ Fונוסיף אותה לרשת ל .N הטענה היא N :היא 4ε־רשת .מדוע? בהינתן f ∈ Fכלשהי אזי לכל iנקח miכך ש ) |f (xi ) − ymi | < εכי y1 , . . . , ynהיא רשת ב ] ([−M, Mברור שf(m1 ,...,mn ) : מוגדר. לכל x ∈ Kכיוון ש xiהיא δ־רשת ,קיים iכך ש d (x, xi ) < δולכן המרחק ) f(m ,...,m ) (xi ) − f (xi ≤ 4ε 1 n | {z } ≤ |) f(m ,...,m ) − ymi + |ymi − f (xi 1 n {z } {z | } | <ε ≤ )(x ) 1 ,...,mn |f (x) − f (xi )| + f(m1 ,...,mn ) (x) − f(m1 ,...,mn ) (xi ) + {z | } | {z } <ε <ε f (x) − f(m <ε הכללות אפשר לדבר בקונטקסט יותר כללי על מרחבי פונקציות ממרחב מטריי אחד לשני .נניח ש X, Yמרחבים מטריים ונניח כי Xקומפקטי ,ניתן להסתכל על המרחב הבא: }רציפות | C (X; Y ) = {f : X → Y 8 אובמ 1.קרפ הערה 1.3.13מה שסימנו ב ) C (Xהוא למעשה )C (X; R למה 1.3.14 ) C (X; Yהוא מרחב מטרי ביחס למטריקה) d (f1 , f2 ) = sup (f1 (x) , f2 (x)) = max d (f1 (x) , f2 (x)) :מקסימום כי Xקומפקטי x∈X x∈X והפונקציה dהיא רציפה(. הוכחה :ברור. נגיד שהתכנסות ב ) C (X; Yפירושה התכנסות במ״ש .כלומר fn → fאם לכל ε > 0קיים n0כך ש > ∀n .n0 dY (fn (x) , f (x)) < ε ∀x ∈ X טענה 1.3.15 אם fn : X → Yרציפות ו fn → f :במ״ש אז fרציפה הוכחה :זהה להוכחה מאינפי 3שבו Y = R טענה 1.3.16 אם בנוסף Yשלם ,אז ) C (X; Yשלם. הוכחה :זהה להוכחה מאינפי 3שבו Y = R ובדיוק באותו אופן ניתן לנסח את Arzela-Ascoliבאופן הזה )המוכלל יותר( נשים לב כי בהוכחה בשום שלב לא השתמשנו בכך שזה .R הגדרה 1.3.17משפחה ) F ⊆ C (X; Yנקראת רציפה במידה אחידה אם לכל ε > 0קיים δ > 0כך ש: dX (x, x′ ) < δ ⇒ dY (f (x) , f (x′ )) < ε ∀f ∈ F ∀x, x′ ∈ X, משפט Arzela-Ascoli 1.3.18מוכלל אם X, Yמרחבים מטריים קומפקטיים ,אז ) F ⊆ C (X; Yהיא קומפקטית יחסית אם״ם Fהיא רציפה במידה אחידה במובן הנ״ל. אפשר לנסח משפט יותר כללי אם Yשם לאו דווקא קומפקטי ואז צריך בנוסף ש F״חסומה במידה אחידה״ במובן שקיימת K ⊆ Y קומפקטית כך ש . ∀x ∈ X, ∀f ∈ F f (x) ∈ K ערכים ✟ המשפט הוא הכללה של המקרה Y = Rוההוכחה היא זהה לחלוטין כיוון שבשום שלב בהוכחה לא השתמשנו בכך שאנו מקבלים ☛ קומפקטיות .תרגיל :האם ניתן לקרב את הפונקציה | f (x) = |xבקטע ] [−1, 1ע״י פולינום במ״ש .כלומר האם לכל ε > 0קיים pפולינום כך ש |p (x) − |x|| < εלכל ]?x ∈ [−1, 1 ✡ ✠ פרק 2 קירוב ע״י פולינומים ומשפט Stone-Weirstrass 2.1 הבעיה הבסיסית בהינתן פונקציה רציפה fעל הקטע ] [a, bנרצה למצוא קירוב שלה ע״י פונקציה יחסית פשוטה ,לדוגמה הפונקציות הפולינומאליות. כלומר ,לכל ε > 0נרצה למצוא פולינום pכך ש.kf − pk = max |f (x) − p (x)| < ε : ]x∈[a,b הדבר נראה קצת בעייתי ,אנו יודעים מטורי חזקות שניתן לקרב בעזרת טיילור ,אך הדבר לא עובד בהכרח כמו שהיינו רוצים. בה״כ אפשר להתבונן ב ] [a, b] = [0, 1כיוון שניתן לעבור בניהם ע״י החלפת משתנים.x 7→ (b − a) x + a : כמו שאנו יודעים ,פולינום טיילור לא בהכרח מתכנס לפונקציה חלקה נקודתית. דוגמה 2.1.1דוגמה ידועה לפונקציה אשר פולינום טיילור לא מתכנס אליה אפילו לא נקודתית. ( 1 = e − x2 x 6 0 = )f (x 0 x=0 הפונקציה fחלקה ,ולכל nמתקיים ,f (n) (0) = 0 :לכן הפולינום טיילור שלה הוא פולינום האפס ,וברור כי הוא אינו מתכנס לפונקציה. כמו כן ,יש פונקציות רציפות שאינן גזירות באף נקודה )לדוגמה הפונקצייה של ויירשטראס( .ונראה שבעייתי לקרב פונקציה כזו ע״י פולינום ,אבל מסתבר שניתן לעשות את זה. משפט Weierstrassמבטיח כי לכל fרציפה ב ] [a, bולכל ε > 0קיים פולינום pכך ש .kf − pk < ε ניסוח שקול למשפט :מרחב הפולינומים Pצפוף ב )].C ([a, b במ״ש במילים אחרות :לכל )] ,f ∈ C ([a, bקיימת סדרת פולינומים Pnכך ש ) .Pn −→ fוכמובן ,ע״י מעבר לתת סדרה ,אנו נקבל כי (deg Pn ≤ n נסוח שקול נוסף :מרחב הפולינומים ממעלה ≥ ) nנסמנו .Pnנגדיר: inf ∞p∈Ckf −pk =d (f, Pn ) : )]f ∈ C ([a, b ) f ∈ Pn ⇐⇒ d (f, Pn ) = 0כי Pnסגורה( לכל ] f ∈ C [a, bמתקיים dn := d (f, Pn ) → 0 :כאשר ∞ → ) .nכי dn ≥ 0מונוטונית יורדת) lim dn = d (f, P) = 0 :שקול ∞→n למשפט הקירוב של ויירשטראס( הערה 2.1.2עובדה :כל מרחב נורמי ממימד סופי nשקול ל Rnבנורמה הרגילה )כלומר הנורמה שקולה( ולכן כל מרחב נורמי ממימד סופי הוא שלם )כל Rnשלם בנורמה הרגילה. לכל מרחב נורמי ) (V, k·kאם U ⊆ Vתת־מרחב מעל Rממימד סופי אז Uשלם ולכן Uסגור .ובפרט Uאיננו צפוף ב ) Vאלא אם כן .(V = U בפרט ,בניסוח של המשפט ,לא ניתן להסתפק בפולינומים ממעלה חסומה ,כיוון שזה מרחב סוף מימדי. בפרק זה נניח כי אנו עובדים עם הקטע ][0, 1 9 Stone-Weirstrassטפשמו םימונילופ י״ע בוריק 2.קרפ 10 2.2 פולינומי אינטרפולציה נקח n + 1נקודות: 0 ≤ x0 < x1 < . . . < xn ≤ 1 למשל.xi = ni : אנו יודעים כי בהינתן n + 1נקודות ו n + 1ערכים אנו יכולים למצוא פולינום העובר בנקודות אלה .כלומר קיים פולינום Pnממעלה ≥ nוהוא יחיד כך ש: ) Pn (xi ) = f (xi )דטרמיננטת (Van der marle הדבר נשמע מאוד הגיוני ,אך באופן נאיבי הוא אינו עובד .למרבית הצער ,לא בהכרח Pn → fאפילו לא נקודתית) .שום דבר לא מובטח לנו לגבי הקטעים בין הנקודות(. אם הפולינומים הייתה משפחה רציפה במידה אחידה הדבר כן היה עובד ,כיוון שאז הייתה להם תת סדרה מתכנסת. לכן דרושה טכניקה אחרת. הערה 2.2.1פולינומי טיילור הם למעשה שיטה מנוונת של פולינומי אינטרפולציה. 2.3 פולינומי ברנשטיין נניח שיש לנו מטבע שאנו מטילים אותו nפעמים ,כאשר ההסתברות שנקבל 0היא xו 1בהתסברות ) 1 − xאנו מניחים כי הצדדים של המטבע הם 0או .(1 מה ההסתברות לקבל kאפסים? ההסתברות היא כמובן: n k n−k )x (1 − x k נתבונן במשתנה המקרי Yהמוגדר: k n fאם קיבלנו kאפסים .התוחלת של המשתנה המקרי הנ״ל היא: n X n k k n−k )x (1 − x f n k = ] E [Y k=0 נבחין כי זהו פולינום ב xממעלה ≥ .nונסמנו ) Bn fפולינום ברנשטיין(. למה זה קרוב לפונקציה ?fכי אנו מצפים לקבל בערך nxאפסים ,והערכים שנקבל עבורם הוא ברור כי: )f (0 = )Bn (0 )f (1 = )Bn (1 . nk במ״ש נראה ש Bn −→ fכאשר ∞ → :n n−k ) pk (x) = nk xk (1 − xברור כי: נסמן: pk (x, n) = 1 n X k=0 n X k )− f (x = |)|Bn (x) − f (x pk (x, n) f n k=0 יהי ,ε > 0כיוון ש fרציפה במ״ש על ] [0, 1קיים δ > 0כך ש |f (x) − f (x′ )| < εלכל ] x, x′ ∈ [0, 1המקיימים .|x − x′ | < δ נקבע δ > 0כנ״ל. 11 Stone-Weirstrassטפשמו םימונילופ י״ע בוריק 2.קרפ B A |} { z { |} z X X k k k pk (x, n) f − f (x) + pk f )− f (x ≤ = )pk (x, n) f n − f (x n n k k k=0 k:| n k:| n −x|<δ −x|≥δ n X נרצה לחסום את Aואת .B יהי |) ,M = max |f (xנבחין כי: ]x∈[0,1 X )pk (x, n k −x|≥δ k:| n B ≤ 2M ואילו עבור :A =1 |} { z n X pk (x, n) ≤ ε pk (x, n) ≤ ε k=0 נשאר להראות כי )pk (x, n P X k k:| n −x|<δ A≤ε קטן מספיק עבור nגדול מספיק. k k:| n −x|≥δ כלומר ,להראות שלכל δ > 0 ,ε > 0קיים n0כך ש: pk (x, n) < ε X k −x|≥δ k:| n לכל n > n0ולכל ].x ∈ [0, 1 משיקולים הסתברותיים קל לראות )ומאותה קלות אלגברית( מאי־שיוויון צ׳בישב :אם Xמשתנה מקרי אזיP (|X − E [X]| ≥ t) ≤ : ) Var(Xלכל .t > 0 t2 במקרה שלנו X ,יהיה מספר האפסים שהתקבלו ב nהטלות .ואז .E [X] = nxואילו השונות ) .Var (X) = nx (1 − xלכן, ההסתברות: )nx (1 − x 1 ≤ 2 δ 2 n2 δ n ≤ )P (|k − nx| > δn אבל נבחין כי: )pk (x, n X |≥δ k n −x | = )P (|k − nx| > δn ואם נרצה להוכיח את הנ״ל ללא אי שוויון צ׳בישב ,אלא בצורה אלגברית ,נבחין כי: Pk (x, n) = 1 n X k=0 כעת נחשב את המומנט הראשון: n n X X n − 1 k−1 n n n−k n−k )x (1 − x = nx x )(1 − x = k k−1 k k=1 } k=1 | {z n(n−1 ) k−1 n−1 n−1 X n − 1 X nx xk (1 − x)n−1−k = nx Pk (x, n − 1) = nx k k=0 k=0 = )kPk (x, n n X k=1 Stone-Weirstrassטפשמו םימונילופ י״ע בוריק 2.קרפ 12 ואת המומנט השני: X n k n−2 k = x (1 − x)n−k )n (n − 1 = x (1 − x)n−k k k−2 n n−2 X X n − 2 n − 2 −2 n (n − 1) x2 x (1 − x)n−k = n (n − 1) x2 = xk (1 − x)n−2−k k−2 k )k (k − 1 Pk (x, n − 2) = n (n − 1) x2 k=0 k=2 k=2 k=0 n−2 X X = )k (k − 1) Pk (x, n n X n (n − 1) x2 נבחין כי: kPk (x, n) = n (n − 1) x2 + nx X k (k − 1) Pk (x, n) + X = ))k 2 (Pk (x, n X ולכן ,השונות היא: )Pk (x, n X kPk (x, n) + n2 x2 X k 2 Pk (x, n) − 2nx X 2 = )(k − nx) Pk (x, n X ומהחישובים הקודמים: )= n (n − 1) x2 + nx − 2nxnx + n2 x2 = −nx2 + nx = nx (1 − x 2 )(k − nx ≤ )Pk (x, n δ 2 n2 1 )x (1 − x ≤ 2 2 δ n 4δ n = )(k − nx)2 Pk (x, n X k X (k−nx)2 ≥δn2 ≤ )Pk (x, n X = )Pk (x, n (k−nx)2 ≥δ 2 n2 X k −x|>δ k:| n 1 δ 2 n2 הערה 2.3.1הבניה של פולינומי ברנשטיין נותנת הערכה לגבי השאלה הבאה: בהינתן ε > 0ו )] ,f ∈ C ([a, bמהי המעלה המינימלית של פולינום pכך ש ?kp − f k < ε ראינו כי : M δ2n kBn (f ) − f k ≤ ε + כאשר δהוא כך ש ,|x − x′ | < δ ⇒ |f (x) − f (x′ )| < εו.M = max |f | : M n = εδאז .kBn f − f k < 2ε :למשל אם f ,פונקציית ליפשיץ אפשר לקחת: = .n אם ניקח 2 ′ ′ α אם fפונקציית הולדר אז |f (x) − f (x )| < c1 (x − x ) :כאשר c1 ,0 < α < 1קבועים .אז ניתן לקחת מתאימים. c ε2 c εk = nעבור cוk 2.4משפט Stone-Weirstrass מה לגבי כמה משתנים? נניח .f ∈ C (K) ,K ⊆ R5לצורך העניין ] .K = [0, 1האם ניתן לקרב את fבעזרת פולינום עם 5משתנים? התשובה היא כמובן חיובית. n n משפט ויירשטראס נכון גם למימדים < .1מספיק להוכיח עבור ] [0, 1כי תמיד ] K ⊆ [−R, Rוניתן להרחיב כל פונקציה רציפה על n Kלפונקציה רציפה על ] [−R, Rונקבל קירוב על המרחב היותר גדול ,לכן הוא גם נכון על המרחב היותר קטן. 5 Stone-Weirstrassטפשמו םימונילופ י״ע בוריק 2.קרפ 13 לא נפרט יותר מידי ,כי נוכיח זאת בצורה אחרת .הרחבה זו היא מאוד טבעית ,אבל הרחבה נוספת שניתן לעשות היא למרחב הפונקציות. נבחין כי ) C (Kהוא חוג ,יש פעולת כפל f, g ∈ C (k) :אז גם ).f · g ∈ C (k ) C (Kהוא אלגברה ,כלומר יש פעולת כפל כך ש: λ (f g) = (λf ) g = f (λg) .1 f (g1 + g2 ) = f g1 + f g2 .2 (g1 + g2 ) f = g1 f + g2 f .3 הגדרה 2.4.1תת־אלגברה :נאמר שתת מרחב וקטורי ) A ⊆ C (Kהוא תת־אלגברה אם f, g ∈ Aאז גם .f · g ∈ Aבמקרה של ) C (Kמתקיים) f1 f2 = f2 f1 :כלומר אלגברה קומוטטיבית( דוגמה A = C (K) 2.4.2או } A = {0הן דוגמאות טריוויאליות לתתי אלגבראות. דוגמה 2.4.3לכל Ax0 = {f ∈ C (K) | f (x0 ) = 0} ,x0 ∈ K דוגמה 2.4.4באופן דומה ,לכל As = {f ∈ C (K) | ∀x ∈ S f (x) = 0} :S ⊆ Kהיא גם תת־אלגברה. דוגמה f |S } 2.4.5קבועה | ) {f ∈ C (Kתת אלגברה) .למעשה :זה שקול ל }(As = {λ | λ ∈ Rץ הדוגמאות הנ״ל הן סגורות )קל לבדוק( דוגמה לא סגורות :עבור ] P ,K = [0, 1־ אלגברת הפולינומים מוכלת בפונקציות החלקות ,מוכלת בפונקציות הגזירות. אם Aתת אלגברה אז Aהיא תת אלגברה )כי אם fn → fו gn → gאז λfn → λf ,fn gn → f g ,fn + gn → f + g :לכל (λ ∈ R משפט הקרוב של ויירשטראס אומר כי.P = C ([0, 1]) : הגדרה 2.4.6תת־שריג :נאמר שתת־קבוצה ) L ⊆ C (Kתת־שריג אם f ∈ Lאז |f | ∈ L הערה 2.4.7תנאי שקול f, g ∈ L :אז.max (f, g) , min (f, g) ∈ L : |−g ,min (f, g) = f +g−|fובאופן דומה: למה זה שקול? כי: 2 ובכיוון השני ,טריוויאלי|f | = max (f, −f ) , |f +g+|f −g 2 = ).max (f, g הערה 2.4.8אם ) L ⊆ C (Kתת־מרחב ,אז Lתת־שריג אם .|f | ∈ L ⇐ f ∈ L משפט Stone-weirestrass 2.4.9 יהי Kמרחב מטרי קומפקטי A ⊆ C (K) .תת־אלגברה A .צפופה ב ) C (Kאם״ם: .1לכל x ∈ Kקיימת f ∈ Aכך ש f (x) 6= 0 .2לכל ,x, y ∈ Kכך ש x 6= yקיימת f ∈ Aכך ש )f (x) 6= f (y )הפרדת נקודות( הערה 2.4.10 .1נבחין כי התנאי השני כמעט ומכיל את הראשון ,כיוון שאם הוא לא מתקיים זה יהיה רק לנקודה אחת. .2אם 1 ∈ Aאז תנאי 1מתקיים אוטומטית. הוכחה :נראה שאם א או ב׳ לא מתקיימים אז Aלא צפופה. אם א׳ לא מתקיים קיימת x0 ∈ Kכך ש ∀f ∈ A f (x0 ) = 0ולכן: }A ⊆ Ax0 = {f | f (x0 ) = 0 כלומר: )A ⊆ Ax0 = Ax0 $ C (k ∈ (1כלומר Aלא צפופה. )כי / Ax0 באופן דומה ,אם ב׳ לא מתקיים ,אז קיימות x, y ∈ Kכך ש x 6= yאבל.∀f ∈ A f (x) = f (y) : .{f | f (x) = f (y)} = B אבל זו תת אלגברה סגורה ולכן A ⊆ B $ C (K) :לכן Aלא צפופה) .כי.(f (z) = d (x, z) ∈ C (K) \B : כלומרA ⊆ : Stone-Weirstrassטפשמו םימונילופ י״ע בוריק 2.קרפ 14 למה 2.4.11 אם ) A ⊆ C (Kתת־אלגברה סגורה אז Aתת־שריג הוכחה :יהי ,f ∈ Aאנו רוצים להוכיח כי .|f | ∈ Aאפשר להניח בה״כ כי ) kf k∞ ≤ 1ע״י מעבר ל ∞ ( kffk ממשפט ויירשטראס ניתן לקרב את gע״י פולינום ,כלומר לכל ε > 0קיים pפולינום ממעלה nכך ש .kg − pk∞ < εבה״כ )ע״י n n P P מעבר ל ) (|p (0)| = |p (0) − g (0)| < ε ,p − p (0אפשר להניח p (0) = 0כלומר ai xi = ai f i ∈ A .p = .hנבחין כי: i=1 i=1 )) h (x) = p (f (xולכן: |h (x) − |f (x)|| = |h (x) − g (f (x))| = |p (f (x)) − g (f (x))| < ε ∀x ∈ K כלומר: kh − |f |k∞ < ε ⇒ |f | ∈ A כי Aסגורה. √ √ פולינום באמצעות פולינום טיילור באופן הבאx2 = 1 − u : הערה 2.4.12ניתן לקרב את | |xע״י √ נשתמש בפיתוח טיילור של שורש : 1 − u = | |xכאשר ,u = 1 − x2 ∞ X √ 1−u=1− cn u n n=1 !!)(2n−3 !!)(2n = 1 2 ) cn = (−1)nעצרת כפולה זה לקחת רק את האי זוגיים במונה ובמכנה הזוגיים ,כלומר קפיצות של 2עד כאשר האיבר המצויין( הטור הנ״ל מתכנס במ״ש עבור ] .u ∈ [0, 1רדיוס ההתכנסות הוא כמובן .1וגם מתכנס עבור u = 1כי: n cn+1 2 (n + 1) − 3 2n − 1 3 = = =1− cn )2 (n + 1 2n + 1 2n + 2 3 −3/2 dn+1ומכיוון שהמנות קטנות או שוות ,כל איבר קטן או שווה. אבל זה גורר כי cn ≤ Dn−3/2 :מכיוון ש dn = nאז dn ≥ 1 − 2n אבל למה זה מתכנס במידה שווה? ממשפט אבל ,אם טור מתכנס ברדיוס ההתכנסות ,אז הוא מתכנס במידה שווה לכל האורך. לכל f 7→ f (x) ,Tx : A → R ,x ∈ Kהיא העתקה לינארית על .למה? מתנאי 1זה לא ,0לכן זה בהכרח על. לכל x, y ∈ Kכך ש .f 7→ (f (x) , f (y)) , Tx,y : A → R2 :x 6= yלמה? נסתכל על התמונה .S = Im Tx,y ⊂ R2 :נבחין כי גם כאן S 6= 0בגלל תנאי הקודם .אם S 6= R2אז בהכרח )בגלל התנאי הקודם( } S = {(a, λa) | a ∈ Rעבור ) λ ∈ Rקבוע(. אבל מתנאי ) λ 6= 1 2כי אנו יכולים לקבל ערכים שונים לקואורדינטות. 2 ∈ )= f (x) , f (y תהי f ∈ Aכך ש f (x) = 1ו .f (y) = λ :אז f 2 (x) = 1 :ו .f (y) = λ2 :אבל / S בסתירה לכך ש ) f 2 ∈ Aהרי Aהיא אלגברה(. 2 ראינו שאם Aאלגברה סגורה אז Aתת־שריג. נותר להוכיח: יהי ) L ⊆ C (Kתת שריג כך ש: .1לכל f 7→ f (x) Tx : L → R x ∈ Kהיא העתקה על. .2לכל f 7→ (f (x) , f (y)) ,Tx,y : L → R2 x 6= y ,x, yהיא העתקה על. אז ).L = C (K )זה מספיק להוכחת המשפט כי Aהוא תת שריג שמקיים את התנאים(. הערה 1 ⇐ 2 2.4.13אלא אם כן .|K| = 1 2 2 2 T fכיλ 6= λ : 15 Stone-Weirstrassטפשמו םימונילופ י״ע בוריק 2.קרפ נוכיח זאת: תהי ).f ∈ C (Kלפי ההנחה לכל x, y ∈ Kאנו יודעים כי קיימת gx,y ∈ Lכך ש ) gx,y (x) = f (xו) gx,y (y) = f (y) :אם x 6= y מתנאי ,2אם x = yמתנאי ( 1 יהי ,ε > 0לכל y ∈ Kיש סביבה פתוחה Vyאשר בה fלא שונה הרבה מ ,gx,yבפרט, ∀z ∈ Vy gx,y (z) > f (z) − ε n כי gx,y − fרציפה ומתאפסת ב .yכלומר יש {Vy }y∈Kכסוי פתוח של .Kמקומפקטיות קיים תת כיסוי סופי.{Vyi }i=1 : לכל :i = 1, . . . , nמהגדרת הסביבות הנ״ל gx,yi > f − ε :ב .Vyi :ולכן L ∋ gx := max gx,yi > f − ε :ב .Vyiאבל זה נכון i=1,...,n לכל המרחב gx > f − ε :כי } {Vyiכיסוי .כלומר לכל xמצאנו gxשיושבת מעל .f − εועדיין מתקיים ).gx (x) = f (x סביבה Uxכך ש gx − f < ε כלומר ,קבלנו משפחה {gx }x∈Kכך ש gx − f > −εעל .gx (x) = f (x) ,Kלכל x ∈ Kקיימת ב ) Uxבגלל רציפות( .קבלנו כיסוי פתוח {Ux }x∈K :מקומפקטיות Kקיים תת כיסוי סופי gxj − f < ε . Uxj j=1,...,mעל Uxj מצד שני gxj − f > −ε :על Kכפי שראינו. נסמן) g = min (gx1 , . . . , gxn ) ∈ L :כי Lתת שריג( g − f < ε .על Uxjוכיוון שזה כיסוי גם על .Kומצד שני ,כיוון ש gxj − f > −εאז גם .g − f > −ε :וביחד נקבל |g − f | < ε :על Kכלומר .kg − f k∞ < εוזה נכון לכל εוכיוון ש Lסגור ⇐.f ∈ L הערה 2.4.14הקומפקטיות של Kהיא קריטית. מה קורה אם Kלא קומפקטי? אם Kהוא מטרי אבל לא קומפקטי אפשר להסתכל על מרחב הפונקציות החסומות הרציפות K → Rעם הנורמה = |). sup |f (x x∈K ∞kf k ∞ אם K = Nאז במרחב הנ״ל אין משמעות לרציפות ,למעשה מדובר במרחב הסדרות {an }n=1החסומות .נהוג לסמן את המרחב ∞ ℓכאשר | .k{an }k = sup |anהמרחב הנ״ל לא ספרבילי ,כלומר אין לו תת־קבוצה בת מנייה צפופה. ∞ באופן שקול ,לא קיימים ∞ n = 1, 2, . . . ,xn ∈ ℓכך ש spanR hxn in=1צפוף. אם הייתה סדרה כנ״ל אז הקומבינציות הלינאריות: ( n ) X = Q − spanQ xn rk xk | k ∈ N r1 , . . . , rk ∈ Q {z } | n=1 קבוצה בת מנייה צפוף ב ∞ ℓכי Qצפוף ב .Rכלומר ) spanQ (xnצפוף ב ) .spanR (xn אבל למה היא לא קיימת? כי לכל A ⊆ Nנסתכל על: ( 1 n∈A = )XA (n ∈0 n /A ולכן kXA − XA′ k∞ = 1 :אם .A 6= A′ לכן לא קיימת תת־קבוצה בת מנייה צפופה ב .ℓכי הכדורים )הפצוחים( ברדיוס סביב XAזרים) .כל קבוצה חייבת לחתוך באופן לא ריק כל כדור(. ∞ בפרט משפט stone-weirstrassלא נכון עבור ∞ .ℓאפשר לקחת את האלגברה שנוצרת ע״י הסדרה . 2 − n1 n=1האלגברה הנ״ל נוצרת ע״י מספר בן מנייה של סדרות ,ולכן היא לא יכולה להיות צפופה. ∞ 1 2 הערה 2.4.15גרסה קומפלקסית של משפט :Stone-Weirstrass } fרציפה | C (K; C) = {f : k → C f = Ref + i Im f fרציפה ⇒⇐ Refוגם Im fרציפות. משפט Stone-Weirstrassקומפלקסי: )מעל ,Cכלומר λf ∈ A ,f ∈ Aלכל λ ∈ Cוכמון f g ∈ Aאם .(f, g ∈ A ) A ⊆i C (K; Cתת־אלגברה h 2 נבחין כי(f + g) − f 2 − g 2 : 1 2 = .f g נניח Aצמודה לעצמה .כלומר שאם f ∈ Aאז גם .(f (x) = f (x)) f ∈ A אז ) A ⊆ C (KlCצפופה ⇒⇐ לכל x ∈ Kקיים f ∈ Aכך ש A .f (x) 6= 0מפרידה נקודות )כמו קודם(. Stone-Weirstrassטפשמו םימונילופ י״ע בוריק 2.קרפ 16 הוכחה ⇒ :תהי ) f ∈ C (K; Cאזי . f = Ref + iImf :נסתכל על } A′ .A′ = {Reg | g ∈ Aהיא אלגברה. Reg1 g2 = Reg1 Reg2 − Im g1 Im g2 } | {z A′ לכל g ∈ Aמתקיים Reg ∈ Aוגם ) Im g ∈ Aבגלל שהצמוד גם ב (Aולכן גם ב .A′ למה A′מקיימת את שני התנאים של משפט Stone-Weirstrassהמקורי? .1לכל x ∈ Kאנו יודעים כי קיימת f ∈ Aכך ש ,f (x) 6= 0אבל זה אומר או ש Ref (x) 6= 0או .Im f (x) 6= 0אבל אנו יודעים כי הם ב A′ולכן קיימת פונקציה כזו ב .f .2הפרדת נקודות בדיוק באותה דרך. ולכן ממשפט Stone-Weirstrassהמקורי A′ ⊆ C (K) ,צפופה .נניח ש ) f ∈ C (K; Cאז שוב ניתן לרשום.f = Ref + i Im f : לכל ε > 0נקח kg1 − Ref k < εכך ש g1 ∈ A′וגם g2 ∈ A′ kg2 − Im f k < εואז g = g1 + ig2 ∈ A :תקרב את .f מסקנה 2.4.16 K ⊆ Rnקומפקטית ,ו )) P ⊆ C (kמרחב הפולינומים ב nמשתנים בתור פונקציות רציפות על (Kהמסקנה של Stone-Weirstrass היא ש Pצפופה. הוכחה :התנאי הראשון הוא כמובן אוטומטי כי .1 ∈ P תנאי השני :אפשר להשיג ע״י פונקציות לינאריות ,למעשה מספיק i = 1, . . . , n xiעל מנת להפריד .ומהמשפט נקבל כי זה יהיה צפוף. מסקנה 2.4.17 1 נסתכל על מעגל היחידה }.S = {z ∈ C | kzk = 1 פונקציה רציפה על מעגל היחידה C S 1הן פונקציות רציפות fעל ] [0, 2πכך ש ) .f (0) = f (2πנבחין כי לחילופין הערה 2.4.18 S 1 = eiθ | 0 ≤ θ < 2π ואזf 7→ f˜ eiθ = f (θ) : לחילופין ,פונקציות מחזוריות עם מחזור .2πכלומר .f : R → R :בהנתן f˜ ∈ C S 1נגדיר f : R → Rע״י f (x) = f˜ eix רציפה מתקיים: )∀x ∈ R f (x + 2π) = f (x רציפה בתור הרכבה של רציפות. בהנתן f : R → Rרציפה עם מחזור 2πאפשר להגדיר f˜ ∈ C S 1ע״י .f (x) = f˜ eix גרסה קומפלקסית: ) a i z i |S 1 a i ∈ C n X i=−n ( =A A .z |S 1 = Idאלגברה ∈ .1מפרידה נקודות כי A = A . z ∈ Aכי z = z −1על .S 1 ממשפט Stone-Weirstrassהמרוכב נקבל כי Aצפופה .C S 1 ; C גרסה ממשית Rez eiθ = cos θ :ובאופן דומן Im z eiθ = sin θ :וכמו כן גם: Rez n eiθ = Reeinθ = cos nθ Im z n eiθ = Im einθ = sin nθ ולכןn ∈ N) : .A′ = f ∈ A | f S 1 ⊆ R ,A′ = (1, cos nθ, sin nθולמעשה: )(an cos nθ + bn sin nθ N X n=1 a0 + Stone-Weirstrassטפשמו םימונילופ י״ע בוריק 2.קרפ 17 כאשר .a0 , . . . , aN , b1 , . . . , bN ∈ Rוזה נקרא פולינום טריגונומטרי. A′היא אלגברה )ניתן לבדוק ישירות בעזרת זהויות טריגונומטריות ,אבל זה נובע מיידית מהמרוכבים(. המסקנה של משפט stone-weirstrassבגרסה הממשית היא שמרחב הפולינומים הטריגונומטריים צפופים במרחב הפונקציות הרציפות על Rעם מחזור .2π נסמן: ∼ 1 }) | ∀x ∈ R f (x + 2π) = f (xרציפה C S = Cper (R) = {f : R → R → ˜ fובעלת הנורמה | kf k∞ = sup |fשבמקרה הזה הוא גם מקסימום | .max |f כאשר 7 f (θ) = f˜ eiθ P A′כפי שציינו היא בעצם האלגברה הקטנה ביותר המכילה את .cos θ, sin θדהיינו ניתן לרשום אותה באופן הבא. ai,j cosi θ sinj θ : הסיבה היא הזהויות: 2π ˆ ∀n, m ∈ N cos nθ sin mθdθ = 0 0 וכמו כן: n 6= m n = m 6= 0 n=m=0 ˆ2π 0 1 cos nθ cos mθ = 1 π 0 2 2.5הערות על משפט האפרוקסימציה של Weierstrass פרק זה הוא בלי הוכחות ,אלא רק קצת טעימה היסטורית. שאלה איכותיות שאפשר לשאול היא: • כמה טוב אפשר לקרב פונקציה רציפה נתונה ע״י פולינומים ממעלה ≥ .n נסמן: )) kf − pk∞ = dist (f, p≤n ) = dist (f, BR (P≤n inf deg p≤n = dn )הכוונה ב p≤nהיא מרחב הפולינומים ממעלה ≥ .(nהשיוויון בסוף ,הכוונה לרדיוס ∞ R = 2 kf kמכיוון שאם kgk > 2 kf kאז .kg − f k ≥ kgk − kf k > kf k משפט .dn → 0 ⇐Weierstrass מכיוון ש P≤nמרחב סוף מימדי ,אזי .dn = min kf − pkכלומר קיים pnכך ש deg pn ≤ nכך ש .kf − pn k = dn )מקומפקטיות כדורים ב .(P≤n משפט 2.5.1צ׳בישב p∈P≤n pnהוא יחיד. מכיוון שהוא יחיד הוא הופך ליותר מעניין .הוא מתאפיין ע״י התכונה הבאה: קימות נקודות: 0 ≤ x0 < x1 < . . . < xn+1 ≤ 1 כך ש f (xi ) − p (xi ) = (−1)i dאו (−1)i+1לכל ) 0 ≤ i ≤ n + 1כאשר .(p = pn כלומר הוא חותך את הפונקציה nפעמים. .|f (xi ) − p (xi )| ≤ d בפרט ממשפט ערך הביניים ) .∃y0 < . . . < yn f (yi ) = p (yiכלומר הפולינומים המיטביים יהיו פולינומי אינטרפולציה. דוגמה 2.5.2למשל קירוב של xnע״י פולינוים ממעלה > .nהפולינום הזה ) (pnנקרא פולינום צ׳בישב. נסמן .Tn = xn − pnויתקיים .|Tn | ≤ 1ומסתבר כי .Tn (cos θ) = cos nθ פרק 3 מערכות אורתונורמליות 3.1 מרחבי מכפלה פנימית יהי Vמרחב וקטורי מעל .R הגדרה 3.1.1מכפלה פנימית על Vהיא תבנית ( , ) V × V → Rעם התכונות הבאות: (x, y) .1לינארית ב ) xכלומר (ax1 + bx2 , y) = a (x1 , y) + b (x2 , y) :לכל a, b ∈ Rו.x1 , x2 , y ∈ V : .2סימטרית(x, y) = (y, x) : .∀x, y ∈ V מ 1ו 2נובע כי: ) (x, ay1 + by2 ) = a (x, y1 ) + b (x, y2 לכל a, b ∈ Rולכל .x, y1 , y2 ∈ V (x, x) ≥ 0 .3לכל x ∈ Vושוויון מתקיים אם״ם .x = 0 לזוג )) (V, ( ,נקרא מרחב מכפלה פנימית. n P דוגמה Rn 3.1.2עם המכפלה הפנימית האוקלידיתxi yi : = ) . (xi ) , (yi i=1 הערה 3.1.3מכפלה פנימית בקונטקסט מרוכב V :מרחב וקטורי מעל ,Cמכפלה פנימית מרוכבת על Vהיא תבנית V × Vעם התכונות 1ו3 כאשר במקום 2נדרוש הרמיטיות .(x, y) = (y, x) :ולכן לינאריות במשתנה השני תהפוך להיות: ) (x, ay1 + by2 ) = a (x, y1 ) + b (x, y2 דוגמה Cn 3.1.4עם המכפלה הפנימית: xi yi X = )) ((xi ) , (yi בקורס בעיקר נעסוק במכפלה פנימית מעל Rאבל הדברים יהיו נכונים תחת Cבהינתן מודיפיקציות קטנות. 3.1.1 תכונות )) (V, ( ,מרחב מכפלה פנימית .נגדיר את הנורמה המושרה ממנה כ: p kxk = (x, x) ≥ 0 18 19 תוילמרונותרוא תוכרעמ 3.קרפ נבחין כי מתקיים: ∀λ ∈ R kλxk = |λ| kxk משפט 3.1.5אי שיוויון קושי שוורץ ∀x, y ∈ V |(x, y)| ≤ kxk kyk הוכחה :זה ברור אם x = 0או .y = 0נניח .x, y 6= 0 y x kxkו: ע״י מעבר ל kykאפשר להניח בה״כ ש.kxk = kyk = 1 : יהי α ∈ Rנבחין כי: 2 )0 ≤ kx + αyk = (x + αy, x + αy) = (x, x + αy) + α (y, x + αy) = (x, x) + 2α (x, y) + α2 (y, y ומהגדרת הנרומה למעשה רשום כאן: 2 2 = kxk + 2α (x, y) + α2 kyk = 1 + 2α (x, y) + α2 נבחר )) α = − (x, yזהו למעשה המינימום של הפרבולה( ונקבל: 2 2 0 ≤ 1 − 2 (x, y) + (x, y) ⇒ |(x, y)| ≤ 1 מסקנה 3.1.6 |(x, y)| = kxk kykאם״ם x, yתלויים לינארית .כלומר קיים λ ∈ Rכך ש x = λyאו .y = λx מסקנה 3.1.7 x → kxkמגדיר נורמה על . V הוכחה :נותר לבדוק את אי שיוויון המשולש.כלומר.kx + yk ≤ kxk + kyk : נראה ש: 2 2 )kx + yk ≤ (kxk + kyk נבחין כי: 2 2 2 2 2 kx + yk = (x + y, x + y) = kxk + 2 (x, y) + kyk ≤ kxk + 2 kxk kyk + kyk ונשים לב ש kx + yk = kxk + kyk :אם״ם y = λxכאשר λ ≥ 0או .x = 0 אינטרפרטציה גיאומטרית: 2 2 2 )kx − yk = kxk + kyk − 2 (x, y נגדיר את הזווית θבין xל־ yלהיות 0≤ θ ≤ πכך ש ממשפט הקוסינוסים אנו באמת נקבל: )(x,y kxkkyk ) (x,y kxkkykמאי שיוויון קושי שוורץ(. = ≤ 1) cos θ 2 2 2 kx − yk = kxk + kyk − 2 kxk kyk cos θ 20 תוילמרונותרוא תוכרעמ 3.קרפ שוויון המקבילית: 2 2 2 2 kx + yk + kx − yk = 2 kxk + kyk נבחין כי מהפיתוח של אי שיוויון המשולש ,ושל משפט הקוסינוסים באמת נקבל את הנדרש. ☛ ✟ את האילוץ .תרגיל p:להפך ,אפשר להראות שאם שוויון המקבילית מתקיים במרחב נורמי ) (V, k·kאז קיימת מכפלה פנימית יחידה על Vכך ש ).kxk = (x, x ✡ ✠ n P הערה 3.1.8למשל |xi | ,ℓ1n Rn ,הנורמה לא באה ממכפלה פנימית) .אותו דבר לגבי ) C (Kאם .|K| > 1 i=1 למה 3.1.9 המכפלה הפנימית רציפה )כפונצקיה (V × V → R כלומר ,אם xn → xו yn → y :אז.(xn , yn ) → (x, y) : הוכחה: ≤ |) |(xn , yn ) − (x, y)| = |(xn − x, y) − (xn , y − yn ≤ |(xn − x, y)| + |(xn , y − yn )| ≤ kxn − xk kyk + kxn k ky − yn k kxn − xk kyk + kxn − xk + kxk kyn − yk } | {z } | {z } | {z →0 →0 →0 ולכן הכל שואף ל .0כנדרש. ∞} {anשל מספרים ממשיים כך ש ∞ < a2n דוגמה ℓ2 3.1.10־ מרחב הסדרות האינסופיות n=1 עם המכפלה הפנימית: an b n ∞ X = )) ((an ) , (bn n=1 צריך להוכיח: ℓ2 .1הוא מרחב וקטורי. ( , ) .2מוגדרת היטב ,כלומר an bn ∞ P מתכנס. n=1 .3מכפלה פנימית ,קושי שוורץ: b2n X a2n X ≤ 2 | |an bn X ע״י מעבר לגבול באי שוויון קושי שוורץ הקלאסי .מקבלים בדיוק כמו קודם ש: qX qX ≤ (an + bn )2 a2n + b2n דוגמה C ([0, 1]) 3.1.11עם המכפלה הפנימית: f (x) g (x) dx ˆ1 0 = )(f, g qX ∞ P . n=1 21 תוילמרונותרוא תוכרעמ 3.קרפ ´1 ברור כי זה בי־לינארי .וכמו כן (f, f ) = f 2 (x) dx :ברור כי זה 0רק כאשר .f ≡ 0 0 ´q 1 2 = .kf k2 ומתקיים שהנורמה הנ״ל0 f (x) dx ≤ kf k∞ : ההבדל בין )]) C ([0, 1עם נורמת המקסימום( לבין )] CL2 ([0, 1אותו מרחב וקטורי. v u 1 ˆu u 2 kf k2 = t f (x) dx 0 ∞kf k2 ≤ kf k לכן ,אם fn → fב )] C ([0, 1אז גם fn → fב )].CL2 ([0, 1 Id כלומר )] C ([0, 1]) → CL2 ([0, 1העתקת הזהות f 7→ fהיא רציפה. אבל הכיוון ההפוך אינו נכון. 2 לדוגמה kfn k2 ∼ n1 :אז fn → 0ב CLאבל ∞ kfn kולכן fn 6→ 0במ״ש. במרחב מכפלה פנימית kf + gk = kf k + kgkאם״ם f = afוכאשר a ≥ 0או .f = 0 לעומת זאת ב )] C ([0, 1אם f, g ≥ 0כך שקיים ] x0 ∈ [0, 1כך ש f (x0 ) = max g ,f (x0 ) = max fאז = ) f (x0 ) + g (x0 .kf + gk = kf k + kgk 3.2וקטורים אורתוגונלים ומרחב ניצב הגדרה 3.2.1בהינתן ) V, ( ,מרחב מכפלה פנימית ,שני וקטורים u, v ∈ Vנקראים ניצבים )אורתוגונלית( אם .(u, v) = 0 הגדרה 3.2.2אם B ⊆ Vתת־קבוצה נגדיר(u, v) = 0} : 3.2.1 .B ⊥ {v ∈ V | ∀u ∈ Bזהו המרחב הניצב ל.B תכונות ⊥ Bהוא תת־מרחב סגור ) vn → vו (u, vn ) = 0 :לכל u ∈ Bאז (u, v) = 0לכל .(u ∈ B }) B ⊥ ∩ B ⊆ {0כי kuk > 0אם .(u 6= 0 ) λi ui : λ1 , . . . , λn ∈ R, u1 , . . . , un ∈ B ⊥ i=1 =U B⊆U ⊆V תת מרחב )(span B = ⊥B ⊥B = ⊥ ⊥ span B ⊥= B אם B1 ⊆ B2אז ⊥.B1⊥ ⊇ B2 n X ( \ B = span B 22 3.2.2 תוילמרונותרוא תוכרעמ 3.קרפ מערכת אורתוגונלית הגדרה 3.2.3מערכת אורתוגונלית היא קבוצה } A ⊆ V \ {0המורכבת מוקטורים אורתוגונליים בזוגות. הגדרה 3.2.4מערכת אורתונורמלית היא מערכת אורתוגונלית המורכבת מוקטורי יחידה. .kuk = 1 n o v . kvk אפשר לעבור ממערכת אורתוגונלית Aלמערכת אורתונורמלית ע״י | v ∈ A i {|}z P כאשר ei = 0, . . . , 1 , . . . , 0אז } {e1 , . . . , enמערכת אורתונורמלית. דוגמה ℓn2 = Rn , ( , ) 3.2.5שהמכפלה היאxi yi : P 2 ∞} ℓ2 = {anמרחב מכפלה פנימיםת עם דוגמה an < ∞ 3.2.6 | n=1 an b n ∞ P =, n=1 אז גם כאן } {enמערכת אורתונורמלית. דוגמה 3.2.7דוגמה יותר רלוונטית לקורס היא {cos (2πnx) : n = 0, 1, 2, . . .} ,CL2 ([0, 1]) :מערכת אורתוגולנית. למה 3.2.8 כל מערכת אורתוגונלית Aהיא בלתי תלוייה לינארית. כלומר לא קיימים u1 , . . . , un ∈ Aו λ1 , . . . , λn ∈ Rלא כולם אפס כך ש: λ1 u1 + . . . + λn un = 0 הוכחה :נניח בשלילה ש .λ1 u1 + . . . + λn un = 0 :אז לכל i = 1, . . . nמתקיים: ) 0 = (λ1 , u1 + . . . + λn un , ui ) = λ1 (u1 , ui ) + . . . + λn (un , ui ) = λi (ui , ui וזה גורר כי ) .λi = 0מעבר אחרון (ui , uj ) = 0 :אם .( i 6= j אם Aמערכת אורתונורמלית אז: n 2 n n X X X X X = λi ui λ2i = ) λi λj (ui , uj λ1 ui , = λi ui i=1 i=1 i,j=1 כאשר .u1 , . . . , un ∈ A ,λ1 , . . . , λn ∈ R טענה 3.2.9 P =u : נניח } {u1 , . . . , unמערכת אורתונורמלית סופית .v ∈ V .אז (v, ui ) ui ∈ U היא קרובה ביותר ל vב .Uכלומר ku − vk < ku′ − vk :לכל u 6= u′ ∈ Uו.u − v ∈ U ⊥ : X 2 2 2 ku − vk = kvk − ) (v, ui הוכחה :נראה ש ⊥ } .u − v ∈ U ⊥ = {u1 , . . . , un (v, uj ) (uj , ui ) − (v, ui ) = (v, ui ) − (v, ui ) = 0 n X j=1 = (v, uj ) uj − v, ui אם u′ ∈ Uאז: 2 ku′ − uk + ku − vk2 ≥ ku − vk2 = }|{z משפט פיתגורס n X j=1 (u − v, ui ) = 2 ′ = ku′ − vk u − u + u − v } | {z } | {z ⊥ ∈U ∈U 23 תוילמרונותרוא תוכרעמ 3.קרפ האחרון הוא שוויון אם״ם .u = ui לבסוף ,נבחין כי: 2 2 )(v, ui ) −2 (u, v } {z kuk2 אבל נבחין: X | = )kv − uk = (v − u, v − u) = (v, v) + (u, u) − 2 (u, v 2 kvk + n X X 2 )(ui , v = (v, ui ) , ui , v = )(v, ui ) (ui , v i=1 X = )(u, v מסקנה 3.2.10 2 (v, ui ) ≤ kuk P לכל v ∈ Vולכל מערכת אורתונורמלית } .{u1 , . . . , un זה נקרא אי שוויון בסל .הוכחה :הראינו בטענה הקודמת כי עבור uשהוגדר בטענה מתקיים: 2 hv, uj i = ku − vk ≥ 0 n X j=1 2 kvk − לכן פשוט מהעברת אגפים נקבל: hv, uj i ≤ kvk2 3.3 n X j=1 סדרות מוכללות הגדרה 3.3.1סדרה מוכללת :תהא Iקבוצת אינדקסים )מעוצמה כלשהי( כלשהי ותהא: x : I → R≥0 הערה 3.3.2זוהי למעשה ״סדרה מוכללת״ מהצורה {xi }i∈Iכאשר הביטוי ״מוכללת״ נובע מכך ש־ Iלא בהכרח בן מנייה. הגדרה 3.3.3סכום סדרה מוכללת :נרצה לתת משמעות לביטוי הסכום של הסדרה xi X ,לשם כך נגדיר: i∈I ) ∞ < | xi : F ⊆ I, |F X i∈F ( xi = sup X i∈I הערה 3.3.4הנ״ל יכול להיות גם אינסוף שכן מדובר בסופרמום של קבוצה שאיננה בהכרח חסומה. דוגמה 3.3.5אם I = Nאז נקבל כי: xn ∞ X n=1 = xi X i∈I 24 3.3.1 תוילמרונותרוא תוכרעמ 3.קרפ תכונות טענה 3.3.6 תהא {xi }i∈Iסדרה כך ש ∞ < xi X אזי ,הקבוצה: i∈I }{i ∈ I : xi 6= 0 שהינה למעשה התומך של הסדרה היא בהכרח בת־מנייה )יכולה להיות סופית( . הוכחה :נניח בשלילה כי הנ״ל לא נכון ונשים לב כי: ∞ [ 1 > i ∈ I : xi = {i ∈ I : xi = }6 0} = {i ∈ I : xi > 0 n n=1 אם הנ״ל כאמור איננה בת־מנייה אז היה קיים ) n0קבוע( כך שעבורו: 1 > i ∈ I : xi n0 איננה בת־מנייה ובפרט אינסופית .מכך לכל k ∈ Nהיינו מקבלים כי לכל קבוצה: 1 > F ⊆ i ∈ I : xi , |F | = k n0 היה מתקיים: k n ✩ > xi X i∈F X . אולם זהו ביטוי שאיננו חסום וזוהי סתירה להנחה כי ∞ < xi ✬ i∈I תרגיל :להרואת שהתכנסות במובן|xa | < ∞ : P באופן הבא: a∈A ) (−xa X xa ≤0 xa − X =: xa ≥0 X a∈A להתכנסות: שקולה P נאמר ש xA = .xאם לכל ε > 0קיימת F ⊆ Aסופית כך שלכל F ⊆ Sסופית: a∈A X xa < ε x − a∈S P )בפרט ,ההגדרה השניה ⇐∞ < | |xa P אם xa מתכנס אז } {a ∈ A | xa 6= 0היא בת־מניה. ( a∈A ✪ a∈A כעת נניח Vמרחב נורמי ,נרצה לדבר על טורים מהצורה vα P a∈A הגדרה 3.3.7התכנסות בהחלטkva k < ∞ : הגדרה 3.3.8התכנסות :נאמר ש va P a∈A P כאשר ∀a ∈ A va ∈ V )לא כל־כך שימושי(. a∈A מתכנס ל vאם לכל ε > 0קיימת F ⊆ Aסופית כך שלכל F ⊆ Sסופית: X va < ε x − a∈S ✫ 25 תוילמרונותרוא תוכרעמ 3.קרפ הערה 3.3.9באופן כללי ,התכנסות בהחלט לא גוררת התכנסות .אם Vשלם)מרחב באנך( אז כן יש גרירה. דוגמה 3.3.10נעתן לקחת ) ℓ2 ⊇ ℓ2f = {an }n≫1מרחב סדרות סופיות( נקח את unשלנו להיות אפסים ,פרט לאיבר ה nשיהיה 1 n נקבל כיkun k < ∞ : P אבל P לא מתכנס. n∈N הערה 3.3.11התכנסות לא גוררת התכנסות בהחלט אפילו אם Vמרחב מכפלה פנימית. P 2 ∞ ) {an }n=1 :כלומר האיבר הn־י הוא דוגמה 3.3.12למשלan < ∞ = ℓ2 ∋ un = 0, . . . , n1 , . . . : ∞ ∞ P P . מתכנס ,אבל ∞ = kun k לכןun = 1, 12 , 13 , . . . : n=1 הערה va 3.3.13 P 1 n כל היתר אפסים( n=1 יחיד אם הוא קיים. a∈A עבור טורים ממשיים מתקיימות התכונות הרגילות: P P P )בהנחה ששניים מהם מהם מתכנסים ,אז גם השלישי(. = ) (xa + ya xa + ya .1 P P P מתכנס ולכל F ⊆ Aסופית מתקיים xa ≤ y .2אם xa אזxa ≤ y : . a∈F הערה 3.3.14עבור v1 , v2 , . . . ∈ Vאזvn : P n∈N מתכנס ⇐ vi אבל ההפך לא נכון באופן כללי )אפליו עבור .(V = R n P a∈A היא סדרה מתכנסת)סדרה שהאינדקס שלה הוא .(n i=1 P הערה 3.3.15אם va מתכנס אז } {a ∈ A | vA 6= 0בת מנייה. a∈A )קל לראות שלכל a ∈ A | kva k ≥ 21 :nהיא סופית( 2 הערה 3.3.16אם } {uα | a ∈ Aמערכת אורתונורמלית אז לכל (v, ua ) < ∞ :v ∈ V וזה נובע מאי שיוויון בסל .לכל F ⊆ Aסופית אז: 2 2 (v, ua ) ≤ kvk X a∈A וזה גורר: 2 2 (v, ua ) ≤ kvk שאלה :האם (v, uA ) ua P X X F ⊆A a∈F מתכנס ב ?Vוהאם הוא מתכנס ל Vעצמו? a∈A 3.4מערכות אורתונורמליות שלמות משפט 3.4.1 בהינתן ) V, (,מרחב מכפלה פנימית. התנאים הבאים שקולים עבור מערכת אורתונורמלית }:{ua | a ∈ A span {ua | a ∈ A} .1צפוף ב VכלומרV = span {ua | a ∈ A} : P (x, ua ) ua .2 = ) ∀x ∈ V xפתוח של xלפי המערכת a∈A }({ua | a ∈ A (x, ua ) (ua , y) .3 P = )(x, y a∈A 2 (x, ua ) .4 P 2 = kxk ∀x ∈ V ∀x, y ∈ V 2 = ) (v, ua X a∈A P a∈A 26 תוילמרונותרוא תוכרעמ 3.קרפ במקרה זה אומרים ש } {ua | a ∈ Aהיא מערכת אורתונורמלית שלמה. הוכחה :2 ⇐ 4 :נבחין כי: X X 2 2 ) (x, ua (x, ua ) ua = kxk − x − a∈F a∈F לכל F ⊂ Aסופית .לפי הנחה ,לכל ε > 0קיימת קבוצה F ⊆ Aסופית כך ש: X 2 2 0 ≤ kxk − (x, ua ) < ε a∈F וזה גורר כי לכל F ⊂ Sסופית מתקיים: 2 (x, ua ) < ε X 2 kxk − a∈S ולכן: X X 2 2 2 (x, ua ) ua = kxk − (x, ua ) < ε x − a∈S a∈S ולפי הגדרת הסכום ,זה אומר ש: (x, ua ) ua X =x כנדרש. :4 ⇐ 3ברור. :3 ⇐ 4ע״י זהות הפולאריזציה: 2 2 2 2 kx + yk − kx − yk kx + yk − kxk − kyk = 2 4 = )(x, y P (x, ua ) ua x −אבל הסכום ⊂ } (x, ua ) ua ∈ span {ua | a ∈ F :1 ⇐ 2ברור .לכל ε > 0קיימת F ⊆ Aכך ש < ε a∈F }.span {ua | a ∈ A נותר להראות :4 ⇐ 1לכל ε > 0קיים } u ∈ span {ua | a ∈ Aכך ש ) kx − uk < εלפי הנחה( .נרשום: X =u λa ua a∈F כאשר F ⊆ Aסופית .לפי טענה קודמת 2 X X ε2 > kx − uk2 ≥ x − (x, ua ) ua = kxk2 − (x, ua )2 a∈F a∈F P )אנו משתמשים בעובדה שהקרוב הטוב ביותר ל xכ span {ua | a ∈ F } :הוא.( (x, ua ) ua : וזה גורר ש: X X 2 2 2 2 kxk − (x, ua ) < kxk − (x, ua ) < ε a∈A a∈F 2 ולכן(x, ua ) : P a∈A 2 ≤ .kxkאבל מצד שני אנו יודעים כי(x, ua ) : P a∈A 2 ≥ kxkמאי שיוויון בסל. P a∈F 27 תוילמרונותרוא תוכרעמ 3.קרפ כלומר ,קבלנו את תנאי .4 האם קיימת מערכת אורתונורמלית שלמה? במקרה של מימד סופי ,אנו יודעים שכן ,אנו עושים הליך גרם־שמידט על בסיס ומקבלים זאת .אבל האם זה קיים למרחב מכפלה פנימית ממימד אינסופי? ∞ ∈ vונקח אין בעיה לבנות סדרה {un }n=1של וקטורים אורתונורמלים )בשביל לבנות את un+1נבחר } / span {u1 , . . . , un n P (v,ui )ui v− i=1 k...k = .un+1 ∞ אם {un }n=1מערכת שלמה ,מה טוב .אחרת :נתבונן ב$ V : ∞ span {un }n=1 = .U אם קיים U ⊥ 6= 0אז אפשר להמשיך את התהליך .אבל כאן ניצבת לנו בעיה ,אנו לא בהכרח יודעים אם יש לנו וקטור ניצב לסגור. הערה 3.4.2המערכת לא חייבת להיות בת מניה ,זה סתם תיאור של אלגוריתם. באופן כללי ,ייתכן ש U ⊥ = 0עבור .U $ V אם Vמרחב הילברט )מרחב מכפלה פנימית שלם( אז מובטח שלכל U $ Vסגור מתקיים . U ⊥ 6= 0 ∞ דוגמה ) ℓ2f 3.4.3מרחב הסדרות הסופיות {an }n=1כך ש an = 0עבור .(n ≫ 1 המכפלה הפנימית היא: an b n ∞ X = )) ((an ) , (bn n=1 נקח תת מרחב: ∞ X an =0 n n=1 } | {z )) ((an ),(bn | } {an =U P an 2 = )} Λ ({an הערה U 3.4.4הוא גרעין של Λכאשר Λ : ℓf → R :כאשר n זה נקרא מרחב מקו־מימד U .1משוכן ב ℓ2fע״י העתקה ιואם נרכיב את ιעל Λנקבל .0 Uסגור כי: X a qX rX 1 π n a2n = √ k{an }k2 ≤ n n2 6 למה U ⊥ = 0למרות ש U $ Vסגור? ∞ ב ℓ2עצמו .U ⊥ = R n1 n=1 6⊆ ℓ2k ,באופן ישיר אם } {biסדרה עם תומך סופי ,נניח bn = 0עבור n > Nכך ש (an , bn ) = 0 לכל .(an ) ∈ U N P an N N N ⇐ n = 1, . . . , N ,bn = ncאבל הסדרה הזאת אינה ב ⊥ .U = 0 ש כך (a ) לכל (a ) , (b ) n n n n=1 n=1 n=1 = 0 n n=1 28 תוילמרונותרוא תוכרעמ 3.קרפ הערה 3.4.5אם היינו לוקחים את Uלהיות: n o X | } U ′ = {an an = 0 לא תת מרחב סגור .למעשה U ′צפוף ב .ℓ2f תהי } {bnסדרה ב ℓ2fכלומר .b1 , . . . , bN , 0, 0, . . . :נקח את הסדרה: P bi bi ,...,− , 0, 0 . . . k k P {cn } = b1 , . . . , bN , − ונקבל כי: טענה 3.4.6 P P P bi bi k = √ bi −→ 0 0, . . . , 0, − } − {c } = , . . . , − , 0, 0 . . . {bn n k k ∞→k k אם Vמרחב הילברט אז ל Vיש מערכת אורתונורמלית שלמה. הוכחה :לפי הלמה של צורן קיימת מערכת אורתונורמלית מקסימלית ביחס להכלה }) {ua | a ∈ Aאיחוד של שרשרת של מערכות אורתונורמליות היא מערכת אורתונורמלית( . נסתכל על } .U = span {ua | a ∈ Aאם U = Vאז } {ua | a ∈ Aמערכת שלמה. אחרת )כלומר (U $ Vאזי .U ⊥ 6= 0 :אם ⊥ u0 ∈ Uכאשר ku0 k = 1אז } {u0 } ∪ {ua | a ∈ Aמערכת אורתונורמלית יותר גדולה ,בסתירה למקסימות של }.{ua | a ∈ A נותר להוכיח שבמרחב הילברט אם U $ Vאז .U ⊥ 6= 0 טענה קושרה: טענה 3.4.7 אם Vמרחב מכפלה פנימית ו U ⊂ Vתת־מרחב שלם )למשל אם Vמרחב הילברט ו Uסגור( .אז לכל v ∈ Vקיים u ∈ Uיחיד כך ש . kv − uk = min kv − u′ k ′ u ∈U וv − u ∈ U ⊥ : הוכחה :הוכחה\יוכח בתרגול .הרעיון של ההוכחה בגדול הוא: d (v, U ) = inf kv − u′ k ′ u ∈U נקח un ∈ Uכך ש ) .kv − un k → d (v, Uמראים משיוויון המקבילית ש un :סדרת קושי .ואז ברור ש.kv − lim un k = d (v, U ) : זה מראה קיום של uכנ״ל ויחידות היא משוויון המקבילית .והתכונה ⊥ v − u ∈ Uאם u1 ∈ U (u1 , v − u) 6= 0אז: 2 2 ) min kv − u + λu1 k < kv − ukכאשר (λ ∈ Rוזו סתירה. בפרט ,אם U $ Vסגור אז U ⊥ 6= 0בהנחה ש Vמרחב הילברט. בהינתן מערכת אורתונורמלית שלמה } .{ua | a ∈ Aאזי: x 7→ ((x, ua ))a∈A לכל קבוצה Aהיה לנו: ) ∞ < x2a 2 כאשר .xa ∈ Rאנו יודעים כי= kxk : 2 ) (x, ua X X a∈A | (xa )a∈A } {z )(x,ua )(y,ua )=(x,y = ℓ2A .כלומר ,קיבלנו פונקציה: a∈A | ( P a∈A ℓ2A ι → V 29 תוילמרונותרוא תוכרעמ 3.קרפ שהיא לינארית ,והיא גם איזומטריה )כלומר ,המכפלה הפנימית ב Vוב ℓ2A :קשורה ע״י .ι ∀x ∈ V kι (x)kℓ2 = kxkV A בפרט ι ,חח״ע. 2 2 התמונה של ιהיא(צפופה ב .ℓAלמה? כי היא מכילה את כל הסדרות הסופיות ⊂ ℓAסופית }ua 7→ ea . {xa }a∈A | {a | xa 6= 0 1 b=a = ) ea (bנשים לב כי = span {ea }a∈A :סופית } {xa }a∈A | {a | xa 6= 0אבל ה spanהנ״ל הוא מערכת כאשר אחרת 0 אורתונורמלית שלמה ב ℓ2Aולכן סופית } {xa }a∈A | {a | xa 6= 0צפוף. אם בנוסף Vמרחב הילברט אז ιהיא על. P אם (xa )a∈A ∈ ℓ2נרצה להראות כיxa ua : מתכנס ב .Vואת זה אנו יכולים להבטיח כי Vמרחב הילברט .לכן אנו יכולים a∈A להגיד כי } {a ∈ A | xa 6= 0היא בת מניה .לשם הפשטות נניח A = Nואז: xn un ∞ X n=1 היא סדרת קושי כי: N 2 N2 2 X X = xn un x2n < ε n=N1 עבור N1מספיק גדול .ולכן xn un ∞ P n=1 מתכנס. n=N1 פרק 4 מרחב )]H ([a, b עד כה דיברנו על מרחבים כלליים ,כעת נקצה לדון ספציפית ב )] CL2 ([a, bאשר כבר דנו בו מעט. } fרציפה בקטע ]CL2 ([a, b]) = {f | [a, b עם המכפלה הפנימית: f1 (x) f2 (x) dx ˆb = ) (f1 , f2 a הוא לא מרחב הילברט כיוון שהוא לא שלם. נסתכל על המרחב.h ([a, b]) : } fאינטגרבילית רימן | h ([a, b]) = {f : [a, b] → R עם ״המכפלה הפנימית״: f1 (x) f2 (x) dx ˆb = ) (f1 , f2 a זהו מרחב יותר כללי יותר ל)] , CL2 ([a, bאבל יש בעיה קלה ,הנ״ל אינו מכפלה פנימית אלא רק תבנית בי־לינארית. (f, f ) ≥ 0תמיד ,אבל ייתכן ש (f, f ) = 0למשל אם: ( 1 x = 12 =f אחרת 0 בקטע ].[0, 1 ´b נרצה להבין מתי ?(f, f ) = 0כלומר ,מתי? f 2 (x) dx = 0 : a ∞ הגדרה A ⊆ [a, b] 4.0.8נקראת ממידה אפס אם לכל ε > 0קיים קטעים [an , bn ]n=1כך ש: ] [an , bn ∞ [ n=1 ו(bn − an ) < ε : ∞ P . n=1 30 ⊆A 31 )] H ([a, bבחרמ 4.קרפ תכונות של מידה אפס: .1מותר להשתמש במספר אינסופי של קטעים בכיסוי )לא מספיק ,באופן כללי ,להשתמש במספר סופי של קטעים ,למשל קבוצת קנטור(. .2איחוד בן מנייה של תתי קבוצות ממידה אפס הוא ממידה אפס) .מכסים את הראשון הכל ובסוף נקבל שזה קטן מ.(ε ε ב2 את השני ב ε 4 ואז ε 8 וכו׳ ,מאחדים .3כל קבוצה בת מנייה היא ממידה אפס. הערה 4.0.9ההפך אינו נכון .למשל קבוצת קנטור. .4המשלים של קבוצה בעלת מידה אפס ב ] [a, bהוא צפוף .במילים אחרות ,קבוצה בעלת מידה אפס לא יכולה להכיל קטע )פתוח או סגור(. N N S P הוכחה :קל לראו תשלא ייתכן ] [ai , bi ⊆ ] [0, 1לכל ] [ai , biכך ש . (bi − ai ) < 1 i=1 i=1 נשאיר את זה כתרגיל . צריך להשתמש בקומפקטיות בשביל לעבור למקרה האינסופי N S P ′ S∞ ′ ′ אבל אם זה נכון ,קיים Nכך ש ) (a′i , b′i עוברים לקטעים פתוחים ,[0, 1] ⊆ i=1 ai , biכך ש ) (bi − a′i ⊆ ]⇐ [0, 1 i=1 סתירה. למה 4.0.10 התנאים הבאים שקולים עבור fאינטגרבילית רימן ב ]:[a, b .(f, f ) = 0 .1 f = 0 .2מחוץ לקבוצה בעל מידה אפס )כלומר } {x : f (x) 6= 0בעלת מידה אפס(. .3הקבוצה } {x : f (x) = 0צפופה. הוכחה :ברור כי :3 ⇐ 2ברור מהתכונות של מידה אפס. נראה :1 ⇐ 3לכל חלוקה a = t0 < t1 < . . . < tn = bנבחר ] ξi ∈ [ti−1 , tiכך ש .f (ξi ) = 0אנו יכולים לעשות זאת בגלל הצפיפות .ואז יש לנו את הסכום רימן: f (ξi ) (ti − ti−1 ) = 0 n X i=1 ´ אבל כיוון שלכל חלוקה מצאנו סכום רימן ״מתאים״ לחלוקה שמתאפס נקבל כי. f 2 (x) dx = 0 : לבסוף נראה :2 ⇐ 1לכל ε > 0קיימת חלוקה a = t0 < . . . < tn = b :כך שסכום סכום דרבו העליון שלה מקיים: f 2 (ti − ti−1 ) < ε sup n X ] i=1 [ti−1 ,ti אנו רוצים להוכיח שהקבוצה שבה fלא מתאפסת ,A = {x | f (x) 6= 0} ,היא בעלת מידה אפס. נבחין כי: Am ∞ [ =A m=1 1 m > )x | f 2 (x = Am )] H ([a, bבחרמ 4.קרפ 32 מספיק להוכיח ש Amבעלת מידה אפס לכל .n ממה שאמרנו קודם לכל ε > 0קיימת חלוקה: a = t0 < . . . < t n = b כך ש: ε m < (ti − ti−1 ) sup f 2 ] [ti−1 ,ti n X i=1 נשים לב שאם ∅ = ,Am ∩ [ti−1 , ti ] 6אז לפי הגדרת :Am 1 m ניקח נקודה בחיתוך ושם 1 m ≥ sup f 2 ] [ti−1 ,ti > .f 2מה שאומר שאת הסכום העליון אנו יכולים לחסום: ) (ti − ti−1 X }∅={i:Am ∩[ti−1 ,ti ]6 X ε 1 > > (ti − ti−1 ) sup f 2 m m ] [ti−1 ,ti כי מדובר על סכום של אי שליליים )הרי .(f 2 לכן: (ti − ti−1 ) < ε אבל ברור ש ] [ti−1 , ti S }∅={i:Am ∩[ti−1 ,ti ]6 X }∅={i:Am ∩[ti−1 ,ti ]6 ⊆ .Amכלומר לכל ε > 0יש כיסוי של Amע״י מספר סופי של קטעים מאורך כולל > .ε וזה אומר ש Amבעלת מידה אפס. ומכיוון שאיחוד בן מנייה של קבוצות בעלות מידה אפס היא בעלת מידה אפס ,נקבל כי גם Aממידה אפס ,הרי Am ∞ S = .A m=1 תזכורת 4.0.11 .1באופן כללי f ,היא אינטגרבילית רימן אם״ם fחסומה ורציפה מחוץ לקבוצה בעלת מידה אפס. .2אם ] C ⊆ [a, bסגורה בעלת מידה אפס .אנו יכוילם להסתכל ב 1Cפונקצייה אופיינית של .Cמקיימת את התנאים של הלמה. fהיא אינטגרבילית רימן כי היא רציפה מחוץ ל) .Cלמשל Cקבוצת קנטור( .אבל ] 1Q∩[0,1היא לא סגורה ,לכן תנאי המשפט לא מתקיימים ,כי היא לא אינטגרבילית רימן כי היא לא רציפה באף נקודה .הטענה ש Cסגורה הכרחית כדי להגיד ש fרציפה על המשלים של .C הערה 1Q∩[0,1] = 0 4.0.12מחוץ לקבוצה בעלת מידה אפס לא גורר ש ] 1Q∩[0,1אינטגרבילית רימן. .3באופן כללי C ,1Cסגורה .איננה אינטגרבילית רימן. הערה (f, f ) = 0 4.0.13אם״ם fמתאפסת כמעט תמיד )כלומר } {x | f (x) 6= 0בעלת מידה .0 נניח באופן כללי ש Vמרחב וקטורי ו ) (,תבנים בי לינארית אי שלילית )כלומר ((v, v) ≥ 0נסתכל על }.K = {v ∈ V | (v, v) = 0 נשים לב שאי שיוויון קושי שוורץ עדיין מתקיים בקונטקסט זה )אותה הוכחה כמו במקרה של מכפלה פנימית(. p p )(u, u) (v, v ≤ |)|(u, v )] H ([a, bבחרמ 4.קרפ 33 ולכן גם אי שיוויון המשולש: p p p )(u + v, u + v) ≤ (u, u) + (v, v מכאן נובע ש Kהוא תת־מרחב של .Vנסתכל על .V ′ = V /K נגדיר יחס שקילות ∼ מעל u ∼ v ,Vאם .u − v ∈ K מחלקות השקילות הן מהצורה) V ′ = V /K := {u + K | u ∈ V } :כל איבר כאן הוא קבוצה }.({u + v | v ∈ K V ′הוא מרחב וקטורי עם מכפלה פנימית .נבחין כי: (u + K) + (v + K) = u + v + K נרצה להראות שזה לא תלוי בנציג ב ,Kאבל זה נובע מכך ש Kהוא תת מרחב ,ולכן זה מוגדר היטב. כמו כן: λ (u + K) = λu + K שוב λכפול איבר ב Kהוא עדיין איבר ב) .Kאם נבחר u′ ∈ u + Kאחר אז u′ = u + vכאשר v ∈ Kואז = )λu′ = λ (u + v λu + λvאבל λvעדיין ב Kולכן.(λu′ = λu + K : הערה 4.0.14שאלו לאן שייך ,0נבחין כי .0 + K = K הפעולות מגדירות מבנה של מרחב וקטורי. נגדיר: )(u + K, v + K) = (u, v מכפלה פנימית. זה מוגדר היטב כי אם u ∼ uו v ∼ vנניח u = v + w1ואילו v = v + w2כאשר w1 , w2 ∈ Kאז: ′ ′ ′ ′ ) (u′ , v ′ ) = (u + w1 , v + w2 ) = (u, v) + (u, w2 ) + (w1 , u) + (w1 , w2 נשים לב שאם w ∈ Kו z ∈ Vאז: p ✿p0 ✘ ✘ )✘w ✘✘ ≤ |)|(w, z (w, (z, z) = 0 ולכן נקבל כי אכן: ′ ′ )(u , v ) = (u, v קל לבדוק כי ) (,מגדיר תבנית בי לינארית על .V ′קבלנו מכפלה פנמית כי (u + K, u + K) = (u, u) ≥ 0 :ומתקיים שיוויון כאשר: (u, u) = 0כלומר.u ∈ K : כלומר ,u + K = Kכלומר וקטור האפס ב .V ′ נסתכל על: H ([a, b]) = h([a,b])/K K־ פונקציות אינטגרביליות רימן שמתאפסות כמעט תמיד. אזי )] H ([a, bהוא מרחב מכפלה פנימית עם המכפלה: f (x) g (x) dx ˆb a = )(f + K, g + K )] H ([a, bבחרמ 4.קרפ 34 הערה 4.0.15הוקטורים במרחב הנ״ל הם לא פונקציות ,אלא מחלקות שקילות של פונקציות כאשר יחס השקילות הוא f ∼ gאם f = gכמעט תמיד )כלומר }) {x | f (x) 6= g (xבעלת מידה אפס(. אבל אנו כן נתייחס לוקטורים האלה כפונקציות למרות שזה לא מדוייק. נדגיש אם אם אנו מסתכלים על )] CL2 ([a, bיש לנו שיכון ב )] h ([a, bוקיימת לנו העתקת מנה π : V → V ′ = V /Kשהיא v 7→ v + Kטרנספורמציה לינארית שגרעינה .Kאז יש לנו גם העתקת מנה ל)].H ([a, b כלומר נקבל העתקה ιמ )] CL2 ([a, b]) → H ([a, bוהיא חח״ע כי אם fרציפה ו f = 0כמעט תמיד אז .f ≡ 0 נחשוב על )] CL2 ([a, bכתת מרחב של )] H ([a, bע״י השיכון הזה ואנו נראה כי הוא צפוף. טענה 4.0.16 הפונקציות הרציפות ))] (CL2 ([a, bצפופות ב )].H ([a, b ראשית נראה טענה דומה עבור פונקציות מדרגה .מה זו פונקציית מדרגה? נסתכל על חלוקה של הקטע a = t0 < t1 < . . . < tn = b ,a, bכאשר בכל אינטרבל בחלוקה הפונקציה קבועה .ואז: ) ai 1[ti−1 ,ti n X =f i=1 כאשר .a1 , . . . , an ∈ R קל לראות שפונקציות המדרגה מהוות תת מרחב ש )]) H ([a, bאם ניקח 2פונקציות מדרגה ,ניתן לעדן את החלוקה ולקבל פונקציית מדרגה חדשה(. למה 4.0.17 מרחב פונקציות המדרגה צפוף ב)].H ([a, b הוכחה :נקח את החלוקה b−a n = ) ti − ti−1חלוקה אחידה( .נקח את הסכום רימן העליון ונגדיר את snלהיות פונקציית המדרגה: ) sup (f ) 1[ti−1 ,ti n X = sn ] i=1 [ti−1 ,ti fאינטגרבילית רימן ,ולכן האינטגרל שלה הוא: ) ai (ti − ti−1 n X = f (x) dx i=1 ˆb a ולכן האינטגרל: סכום רימן עליון = sn ˆ ומעצם הגדרת snמתקיים ) f (x) ≤ sn (xלכל ) xחוץ מאולי bאבל אין זה משנה( ומצד שני: ˆ ˆ 0 ≤ sn − f < ε עבור nמספיק גדול )מכיוון שהסכומי רימן העליונים מקרבים את האינטגרל(. נבחין כי: | |sn (x)| ≤ sup |f ][a,b וזה בעצם אומר ש snמקרבת את ,fלמה? כי: sn (s) − f (x) dx < 2 sup |f | ε וזה מקרה כי sn → fב )].H ([a, b כעת נחזור לטענה: ˆb a | sup (sn − f ) (sn − f (x)) dx ≤ 2 sup |f | {z } | ≤2 sup|f ˆb a 2 ≤ (sn − f ) dx ˆ 2 = ksn − f k 35 )] H ([a, bבחרמ 4.קרפ טענה 4.0.18 הפונקציות הרציפות ))] (CL2 ([a, bצפופות ב )].H ([a, b הוכחה :מספיק להראות שאפשר לקרב פונקציית מדרגה ע״י פונקציה רציפה .מרחב הפונקציות המדרגה נפרש ע״י ] .1[t1 ,t2כתרגיל. הרעיון הוא להראות ש )] 1[t1 ,t2 ] ∈ CL2 ([a, bואז: ] CL2 ([a, b]) ⊃ span 1[t1 ,t2 ואז :פונקציות המדרגה יהיו בסגור הזה ,וכיוון שהוא סגור אז גם הסגור של פונקציות המדרגה .ומהלמה הקודמת נקבל כי )]H1 ([a, b הוא הסגור של פונקציות המדרגה ולכן: )]CL2 ([a, b]) = H ([a, b כלומר הפונקציות הרציפות הן צפופות. מסקנה 4.0.19 מרחב הפולינומים צפוף ב )].H ([a, b הוכחה :כל פונקציה רציפה היא גבול במ״ש של פולינומים )משפט ויירשטראס( ⇐ אפשר לקרב את fע״י פולינום ב )]) H ([a, bכי ) .(kf k2 < kf k∞ (b − aולכן: )]} = H ([a, bהפונקציות הרציפות{ ⊇ }הפולינומים{ מסקנה 4.0.20 בפרט H ([a, b]) ,הוא מרחב ספרבילי .הפולינומים עם מקדמים רציונליים ־ קבוצת בת מנייה צפופה ב )].H ([a, b הוכחה :כי הפולינומים הם קבוצה בת מנייה אשר צפופה ב )].H ([a, b 4.1 התכנסות סדרות פונקציות הגדרה {fn } 4.1.1אינטגרביליות רימן f ,אינטגרבילית רימן בקטע ] ,[a, bנאמר ש fn → fבממוצע אם ] ) [fn ] → [fמחלקות( ב ´b )] H ([a, bכלומר. (fn − f )2 dx → 0 : a הערה 4.1.2מיחידות הגבול f ,כנ״ל היא יחידה עד כדי קבוצה בעלת מידה אפס. אם fn → fבמ״ש⇐ fn → fבממוצע .מכיוון ש f 2 ≤ (b − a) sup f ´q הגדרה 4.1.3נאמר ש fn → fנקודתית כמעט תמיד אם }) {x | fn (x) 9 f (xהיא בעלת מידה אפס. )] [fנקבעת באופן יחיד(. הערה 4.1.4התנאי fn → fנקודתית כמעט תמיד ,תלוי רק ב] [fnו ] ) [fכלומר במחלקות(. זה נובע מכך שאחוד בן מניה של קבוצות ממידה אפס ,הוא גם כן ממידה אפס. 4.1.1 הקשר בין ההתכנסויות מה הקשר בין התכנסות בממוצע להתכנסות נקודתית כמעט תמיד? )] H ([a, bבחרמ 4.קרפ 36 דוגמה ) 4.1.5דוגמה נגדית( נתבונן ב: 1 n √( n = fn 0 ≤0≤x אחרת fn → 0לכל x 6= 0נקודתית .אבל: 2 fn (x) dx = 1 ˆ ולכן fn 6→ 0בממוצע. הערה 4.1.6אם fn → fכמעט תמיד ו fnחסומות במידה אחידה )כלומר (∀n ∀x ∈ [a, b] |fn (x)| < Mאז fn → f :בממוצע. )לא נוכיח(. הערה 4.1.7גם אם fnרציפות וחסומות במידה אחידה ו fn → fבכל נקודה זה עדיין לא מבטיח ש fאינטגרבילית רימן. דוגמה 4.1.8נסדר את הרציונלים } Q ∩ [0, 1] = {n1 , n2 , . . .בסדר .נסמן: ( } 1 x ∈ {n1 , . . . , nn = fn אחרת 0 ]) fn → 1Q∩[0,1פונקציית דיריכלה( שהיא לא אינטגרבילית רימן .המחלקה של [fn ] = 0אבל פונקציית הגבול אינה אינטגרבילית רימן. מה לגבי הכיוון ההפוך? נראה כי גם התכנסות בממוצע לא גוררת התכנסות נקודתית כמעט תמיד. 1 x ≤ 21 דוגמה ,f1 = 1 4.1.9 0 x>0 ובאופן כללי: ( = ,f2 1 2 1 2 >1 x ≤0 x i+1 n ( = ,f3 <≤x i n 1 3 1 3 ≤x >x 1 0 ( ( 1 = ... f4 0 = )f(n)+i (x 2 כאשר .0 ≤ i < n 1 →0 n = f(n)+i (x)2 dx 2 ˆ אבל fn (x) :לא מתכנסת לאף fn (x) = 1 .xעבור אינסוף n־ים וגם fn (x) = 0עבור אינסוף n־ים. )] H ([a, bבחרמ 4.קרפ 37 הערה 4.1.10 .1אם fn → fבממוצע אז קיימת תת סדרה כך ש fnk → fכמעט תמיד) .לא נוכיח( .2אם fn → fבממוצע וגם fn → f ′נקודתית כמעט תמיד אז f = f ′כמעט תמיד. הוכחה :זה נובע מ ,1אבל נוכיח באופן בלתי תלוי. 2 ´ בה״כ ) f = 0ע״י מעבר ל (fn − fץ כלומר מניחים ש fn (x) dx → 0 תמיד. ∞ [ 1 > x | f (x)2 = }{x | f (x) 6= 0 n n=1 n o 2 כלומר ,מספיק להראות כי x | f (x) > δ = Aδ ו fn → fכמעט תמיד .ונראה ש f = 0כמעט ממידה אפס לכל .δ > 0 1 2 = x | fn (x) > δ ∀n ≥ m 2 כיוון ש fn → fכמעט תמידBm ∪ C , ∞ S m=1 Bm ⊆ ) Aδכאשר Cבעלת מידה אפס(ץ נראה ש Bmהיא בעלת מידה אפס .יהי ,ε > 0עבור nמספיק גדול: 2 fn (x) dx < ε ˆ נבחר חלוקה מספיק עדינה: a = t0 < . . . < t k = b כך ש: ε 2δ < ) f (x)2 (ti − ti−1 X ] [ti−1 ,ti נבחין כי אנו יכולים לחסום את זה גם: 2 ) f (x) (ti − ti−1 X ] [ti−1 ,ti ≤ ) (ti − ti−1 X ∅=i∈[ti−1 ,ti ]∩Bm 6 ולכן: ] [ti−1 , ti [ }{i: [ti=1 ,t]∩Bm 6=0 ⊆ Bm )נכון תמיד( ומתקיים: (ti − ti−1 ) < ε כלומר Bmממידה אפס. X }∅={i| [ti−1 ,ti ]∩Bm 6 1 δ 2 38 4.2 )] H ([a, bבחרמ 4.קרפ הערות והשלמות על המרחב )]H ([a, b כאמור ,המרחב )] H ([a, bאינו שלם. דוגמה 4.2.1 x ≥ n1 אחרת ln x 0 ( = )fn (x בקטע ] .[0, 1ברור כי )] fn ∈ H ([0, 1לכל . nכמו כן fn ,היא סדרת קושי: 1 2 }(ln x) dx |{z → 0 ∞→m ˆm 2 = kfn − fm k n>m 1 n אוניפורמיט ב .n fnלא מתכנסת ב )] H ([0, 1כי אחרת fn → fב )] H ([0, 1אז ]fn |[δ,1] → f |[δ,1ב )]H ([δ, 1לכל .δ > 0 2 |fn − f | dx −→ 0 ∞→n ˆ1 δ לכל .δ > 0 אבל fn |[δ,1] = ln xעבור f |[δ,1] = ln x⇐n ≫ 1כמעט תמיד f = ln x⇐.כמעט תמיד ב ].[0, 1 ולכן fלא חסומה כי | |ln x| |(0,ε) > |ln εלכל .ε > 0לכן היא לא חסומה על קבוצה שהיא לא ממידה אפס. ולכל ε > 0קיים ) x ∈ (0, εכך ש .f (x) = ln x לכן לא קיימת מחלקת שקילות שמכילה את ) f (xב )] .H ([0, 1כי היא לא חסומה ולכן לא אינטגרבילית רימן. הערה 4.2.2נבחין כי גם אם נאפשר אינטגרלים לא אמיתיים זה לא יעזור. דוגמה 4.2.3לסדרת פונקציות fnבקטע ] [0, 1חסומות במידה אחידה ,וסדרת קושי ,אבל fnלא מתכנסת ב )].H ([0, 1 הדוגמה היא קבוצת קנטור השמנה ,בדומה לבנייה של סדרת קנטור ,נתחיל עם הקטע ]:[0, 1 ]F C0 = [0, 1 נוציא קטע האמצע באורך רבע נקבל: 3 5 ∪ ,1 8 8 F C1 = 0, 1 שוב נחזור על אותו קונספט ,נוציא קטע באורך 16מהאמצע של כל קטע: 5 7 3 5 25 27 F C2 = 0, , ,1 ∪ ∪ , ∪ 32 32 8 8 32 32 וכו׳ .בשלב ה n־י נוציא קטעים באורך 41nמאמצעי הקטעים של .F Cn−1 נבחין כי F Cnהוא איחוד של 2nקטעים סגורים שאורכם 1 4n rn−1 − 2 = rn ונקבל כי: rn = 2−n−1 + 2−2n−1 )] H ([a, bבחרמ 4.קרפ 39 נתבונן ב F Cn ∞ T n=1 = ) F Cכיוון ש .(F Cn+1 ⊆ F Cnהיא קבוצה סגורה. המשלים של Aשל F Cבקטע ] [0, 1הוא איחוד עבור n = 1, . . . , 2של 2n−1קטעים באורך ולכן האורך הכולל הוא: 1 4n כל אחד יחד עם השלבים הקודמים. ∞ X 2n−1 1 = n 4 2 n=1 כלומר ,המידה שנשארת היא גם חצי F C .היא קבוצה דלילה ,כלומר A ,צפופה. כלומר ,לא ייתכן ש [a, b] ⊆ F Cעבור .b > aכי אחרת [a, b] ⊆ F Cn ,אבל אם nמספיק גדול האורכים הולכים וקטניםF Cn . הוא איחוד זר של 2nקטעים באורך 2−n−1 + 2−2n−1ולכן [a, b] ⊆ F Cnגורר כי ] [a, bמוכל באחד הקטעים הנ״ל .וזה גורר כי b − a ≤ 2−n−1 + 2−2n−1לכל ,nאבל זה שואף לאפס ,לכן b − a ≤ 0כלומר לא ייתכן. אחרי כל ההקדמה ,הנ״ל נותן לנו דוגמה לסדרה של פונקציות שלא מתכנסת. נקח fn = 1F Cnאז fnסדרת קושי ב )]H ([0, 1כי: 1F Cn dx אבל+ 2−n−1 : 1 2 ˆ = 1F Cm dx = 2n rn 1F Cm dx − ´1 0 ˆ = 1F Cm \F Cn dx 0 = kfn − fm k n>m ולכן ההפרש הוא: = 2−m−1 − 2−n−1 −→ 0 ∞→m ˆ1 2 1 + 2−n−1 2 1 + 2−m−1 − 2 = ל fnאין גבול ב )] ,H ([0, 1כיוון שנניח בשלילה כי fn → fבקטע ] [0, 1אז fn |[a,b] → f |[a,b] :לכל ] .[a, b] ⊆ [0, 1אם ∞ S = ) Aאיחוד זר( אז לכל fn |(am ,bm ) ≡ 0 ,mעבור nמספיק גדול. ) (am , bm m=1 לכן f |(am ,bm ) ≡ 0כמעט תמיד .בפרט } B = {x | f (x) = 0צפופה ב ) B⇐(am , bmצפופה ב (am , bm ) = A ב ]) [0, 1כי Aצפופה ב ] f = 0 ⇐ ([0, 1כמעט תמיד ב ] f ) .[0, 1אינטגרבילית רימן(. אבל זו סתירה כי: 1 1 → + 2−n−1 2 2 ולכן .fn 9 0 = 1F C n ˆ1 0 = fn2 ˆ ∞ S ⇐ Bצפופה m=1 חלק II טורי וטרנספורם Fourier 40 פרק 5 טורי Fourier 5.1 פיתוח Fourier נתבונן ב: n = 1, 2 . . . n = 0, 1, 2 . . . במרחב )] H ([0, 2πכאשר: √1 2π ϕn ψn = ϕ0ולכל : n > 0 )cos(nx √ π )sin(nx √ π = )ψn (x = )ϕn (x ( נבחין כי זו מערכת אורתונורמלית ב )] . H ([0, 2πכלומר ,לכל m = 0, 1, 2, . . .ו n = 1, 2, . . .נקבל: ϕn (x) ψ (x) dx = 0 ˆ2π 0 וכמו כן ,לכל n, m = 1, 2, . . .נקבל: ϕn (x) ϕm (x) dx = δn,m ˆ2π 0 לבסוף ,לכל n, m = 0, 1, 2, . . .נקבל: ψn (x) ψm (x) dx = δn,m ˆ2π 0 הנ״ל נובעים משיקולים טריגונומטריים. טענה 5.1.1 ϕn , ϕmהיא מערכת אורתונורמלית שלמה ב )].H ([0, 2π הוכחה :ראינו שמרחב הפולינומים הטריגונומטריים )= ) (span (ϕn , ψnצפוף במרחב הפונקציות הרציפות ב] [0, 2πכך ש = )f (0 )) f (2πעם נורמת | .(max |f ☎ ✞ תרגיל :להראות שמרחב הפונקציות הרציפות fב ] [0, 2πכך ש ) f (0) = f (2πצפוף ב )].H ([0, 2π ✝ ✆ ומכאן נובע כי } span {ϕn , ψmצפוף ב )] .H ([0, 2πולכן ϕn , ψmמערכת אורתונורמלית שלמה. 41 42 Fourierירוט 5.קרפ מסקנה 5.1.2 כל )] f ∈ H ([0, 2πאפשר לרשום בצורהbn sin (n·) : הערה 5.1.3חשובה! השיוויון הנ״ל ))·bn (f ) sin (n )bk (f ) sin (kx n P ∞ P n=1 k=0 ∞ P an cos (n·) + an (f ) cos (n·) + = fב )].H ([0, 2π n=0 n=1 ∞ P ∞ P = (fהוא שיוויון ב )] .H ([0, 2πכלומר ,אם ak (f ) cos (kx) + n=0 k=0 אז sfn → f :ב )] ,H ([0, 2πכלומר התכנסות בממוצע. אבל כידוע לנו ,התכנסות בממוצע לא בהכרח גוררת התכנסות נקודתית. ההתכנסות הנקודתית/במ״ש של sfnל fהיא שאלה יותר עדינה שנחקור בהמשך. נבחין כי עבור n > 0 f (x) cos (nx) dx f (x) sin (mx) dx ˆ2π 1 1 = ) √ (f, ϕn π π 0 ˆ2π 1 1 = ) √ (f, ψn π π = ) an (f = ) bn (f 0 ו: f (x) dx ˆ2π 1 2π = ) a0 (f 0 הנ״ל נקרא פיתוח Fourierשל .f להפך ,בהינתן a0 , a1 , . . .ו b1 , b2 , . . . :אפשר להסתכל על הטור: )bn sin (nx ∞ X an cos (nx) + n=1 ∞ X = )f (x n=0 ולשאול לאיזה פונקציה הוא מתכנס? או מה התכונות שלה. מסקנה 5.1.4 שיוויון Parsevalנותן לנו כי: 2π ˆ ∞ X 2 2 2 an (f ) + bn (f ) = kf k2 = f (x)2 dx (f, ψn ) = 2πa0 (f ) + π (f, ϕn ) + = n=0 n=1 n=1 0 2 2 דוגמה .f (x) = x 5.1.5 8π 3 3 n P = x2 dx ˆ2π 0 2 = kf k ∞ X 2 ∞ X kf k22 = sfn Fourierירוט 5.קרפ 43 נחשב את המקדמים: xdx = π ˆ2π 1 2π = ) a0 (f 0 0 ❃ ✚ ✯ 0 ˆ2π ✟ 2π ✟ ✚ )x sin (nx sin nx ✚ ✟✟ − = x cos (nx) dx ✟ ✚ dx = 0 ✟n n ✚ 0 ✟ 0 ✚ 0 ❃ ✚ 2π ✚ ˆ2π 2 1 )x cos (nx ✚ cos + x sin (nx) dx = − ✚nxdx = − πn ✚ nπ n 0 0 ✚ כלומר ,נקבל כי: )sin (nx ∞ X 2 n n=1 ˆ2π 1 π = ) an (f 0 ˆ2π 1 π = ) bn (f 0 x=π− מה נותן לנו שיוויון פרסבל? ∞ ∞ X X 1 4 π2 8π 3 ⇒ = = 2π 3 + π 3 n2 n2 6 n=1 n=1 נבחין כי ,אין התכנסות נקודתית ב x = 0כי .0 6= π כמו כן x = 2π ,נקבל כי.2π 6= π : מה קורה ב ?x = πבמקרה זה הכל תקין ,נקבל .π = π מה קורה כאשר ?x = π2נקבל: ∞ k )X (−1 π =π−2 2 2k + 1 k=0 k מכיוון ש )= (−1 וזה תקין כי: (2k+1)π 2 sin 1 1 1 π = + − + ... 3 5 7 4 1− ולכן באמת מתקיים שיוויון. כלומר ,טור פורייה לא מתכנס בהחלט )באופן כללי( ,וגם אם כן ,הוא לא מתכנס ״מהר״ נדון על המשמעות בהמשך. הטור מתכנס לפי ) Abelסדרה מונוטונית שיורדת לאפס כפול סדרה עם סכומים חסומים(. אבל הוא לא מתכנסת ל) f = xלפחות בנקודות .(x = 0, 2π הערה 5.1.6אם טור פורייה: )bn sin (nx ∞ X an cos (nx) + n=1 ∞ X n=0 מתכנס במ״ש אז הוא מייצג פונקצייה רציפה )בתור גבול של פונקציות רציפות(. f ∈ H ([0,ו sfn → f :במ״ש אז fרציפה וכמובן.f (0) = f (2π) : בפרט ,אם נתונה לנו פונקציה )]P2π P אז ברור כי: מצד שני ,אם|an | , |bn | < ∞ : )bn sin (nx ∞ X n=1 מתכנס בהחלט במ״ש. an cos (nx) + ∞ X n=0 Fourierירוט 5.קרפ 44 שאלות בסיסיות לגבי טורי פורייה 5.2 .1בהינתן fמה אפשר להגיד על ?sfnהתכנסות נקודתית? במ״ש ל ?f .2בהינתן סדרות an , bnמה אפשר להגיד על הטורbn sin (nx) : ∞ X ∞P n=0 an cos (nx) + n=1 הפונקציה המתקבלת רציפה/גזירה? ואם היא גזירה ,מה הטור פוריה של ?f ′ ? התכנסות נקודתית? במ״ש? האם דוגמה 5.2.1יש דוגמה לפונקציה רציפה fעל ] [0, 2πכך ש ) f (0) = f (2πכך ש ) sfn (0אינה סדרה מתכנסת ואפילו ∞ → ).sfn (0 קיימים טורי פורייה המתכנסים בהחלט במ״ש )כלומר ∞ < | |bn באף נקודה )פונקציית ויירשטראס(. בכיוון החיובי: P |an | , P כך שהפונקציה המתקבלת היא רציפה אבל לא גזירה .1אם ) sfn (xמתכנסת ו fרציפה ב xומתקיים )) f (0) = f (2πבמידה ואנו מדברים על (x = 0, 2πאז )sfn (x) → f (x )הכוונה להתכנסות נקודתית ב .(xלשם הפשטות נניח .x 6= 0, 2πנוכיח זאת בהמשך. .2משפט .Carlesonאם )]f ∈ H ([0, 2πאז ) sfn (xמתכנסת כמעט תמיד )ל )) (f (xלא נוכיח(. 5.3טור פורייה של הנגזרת נניח כי fרציפה וגזירה ברציפות ומתקיים ) f (0) = f (2πמה אנו יכולים להגיד על הטור של הנגזרת? טענה 5.3.1 נניח ש fרציפה בקטע ] [0, 2πומתקיים ) f (0) = f (2πו fגזירה ברציפות למקוטעין .אז: ) nbn (f ) −nan (f 0 = ) an (f ′ ′ = ) bn (f = ) a0 (f ′ הוכחה: ✯ 0 ˆ2π ✟ ✟ 2π ✟ n 1 ✟ ✟ f + )cos (nx f ′ (x) cos (nx) dx = ) sin (nx) f (x) dx = nbn (f }|{z ✟✟ π π 0 ✟ אינטגרציה בחלקים {z } | 0 ˆ2π 1 π = ) an (f ′ 0 )f (0)=f (2π באותו אופן.bn (f ′ ) = −nan (f ) : ולבסוף: 2π f ′ (x) dx = f |0 = 0 ˆ2π 1 = ) a0 (f 2π ′ 0 מסקנה ,ששכחנו לציין ,משיוויון פרסבל :לכל )] an (f ) , bn (f ) → 0 f ∈ H ([0, 2πכש ∞ → .n מסקנה 5.3.2 k k ברציפות Pkפעמים ומתקיים ) f (0) = f (2πאז n bn (f ) → 0 ,n an (f ) → 0 :כאשר ∞ → .n אם fגזירה P ∞ < .( n2k a2n , n2k b2n )ולמעשה Fourierירוט 5.קרפ 45 הוכחה :מתקבל על ידי הפעלת הטענה הקודמת kפעמים +שימוש במסקנה של שיוויון פרסבל. P P בפרט ,אם fגזירה ברציפות פעמיים ומתקיים ) f (0) = f (2πאז ∞ < | . |an | , |bnכי: C n2 < | ∀n |bn | , |an ∃C ולכן sfn → fבהחלט במ״ש. למעשה הדרישה של גזירה פעמיים היא מיותרת .נראה זאת במשפט הבא: משפט 5.3.3 אם fרציפה בקטע ] [0, 2πומתקיים ) f (0) = f (2πו fגזירה ברציפות למקוטעין אז|an | + |bn | < ∞ : במ״ש. הוכחה :משיוויון פרסבל עבור f ′נקבל כי: 2 ∞ < ) bn (f ′ אבל: 2 ) n2 an (f ) + bn (f ולכן: באותו אופן עבור | |bn ∞ X X X 2 an (f ′ ) + 2 = ) bn (f ′ X X 2 an (f ′ ) + X v v uX uX X X u ∞ 1 ∞ u 1 n2 a2n t ∞< ≤ t = | |an | n |an }n |{z n2 =n 1 =n 1 קושי־שוורץ ולכן sfnמתכנס בהחלט. n=1 בהנתן טור פורייה: )bn sin (nx ∞ X an cos (nx) + n=1 ∞ X n=0 P אז ההתכנסות היא בהחלט ובמידה שווה ל .f ראינו כי אם ∞ < | |an | + |bn P )כמובן שזו טענה יותר חזקה( אז: אם נניח בנוסף כי ∞ < | n |an | + n |bn )nbn cos (nx ∞ X nan sin (nx) + n=1 ∞ X n=1 ′ f =− מתכנס בהחלט במידה שווה בגלל ההנחה. תזכורת 5.3.4אם fn ∞ X n=1 = fבהחלט במ״ש ,וfn′ (x) : ∞ X מתכנס בהחלט במ״ש אזfn′ (x) : n=1 n=1 באופן יותר כללי: טענה 5.3.5 נתונים a0 , a1 , a2 , . . .ו b1 , b2 , . . .מספרים ממשיים ו k ∈ Nכך ש: ∞ ∞ ∞ X ∞ X < | nk |an n=1 ∞ X < | bk |bn n=1 = .f ′ P אז sfn → f :בהחלט Fourierירוט 5.קרפ 46 אזי הטור )bn sin (nx ∞ X an cos (nx) + n=1 ∞ X = fמתכנס בהחלט במידה שווה ו fגזירה kפעמים ומתקיים: n=0 )(i ))bn (sin (nx ∞ X + ∞ X )(i ))an (cos (nx n=1 n=1 = )f (i) (x טור מתכנס במידה שווה ובהחלט. מסקנה 5.3.6 אם |an | ≪k n−kלכל ) kהסימון המוזר :קיים Ckכך ש (∀n |bn | |an | ≤ ck n−k ∞ ∞ X X אז )bn sin (nx an cos (nx) + היא פונקציה חלוקה .ולהפך ,אם fפונקציה חלוקה ומתקיים ) f (0) = f (2πאז ∀k :מתקיים n=1 n=1 .|an (f )| |bn (f )| ≪ n−k נתבונן ב f : [0, 2π] → Rפונקצייה אינטגרבילית רימן. נרצה למצוא את המקדמי פורייה שלה .כאמור: f (x) dx ˆ2π 1 = ) a0 = a0 (f 2π 0 עבור :n > 0 ( ´ 2π an = an (f ) = π1 0 f (x) cos (nx) dx ´ 2π bn = π1 0 f (x) sin (nx) dx לכן ,הטור פורייה של fהינו: )bn sin (nx ∞ X an cos (nx) + n=1 ∞ X f (x) = a0 + n=1 למעשה מדובר בפיתוח לפי. √12π , √1π cos (nx) , √1π sin (nx) : הטור הנ״ל מתכנס בממוצע ב )].H ([a, b באופן מדוייק יותר ,לכל פרמוטציות σ, τשל } {1, 2, 3, . . .נקבל: aσ(o) cos (σ (k) x) + bτ (k) sin (τ (k) x) → f n X Sn = a 0 + k=1 מה לגבי התכנסות נקודתית/במ״ש? וגם ,מה ניתן להגיד על fמתוך ידיעת מקדמי פורייה שלו ולהפך? ∞ X ראינו כי אם ∞ < | |an | + |bn אזי טור הפורייה מגדיר פונקצייה רציפה מחזורית כך ש ).f (x + 2π) = f (x n=1 ∞ X באופן כללי יותר ,אם ∞ < )| nk (|an | + |bn אז טור הפורייה מגדיר פונקציה גזירה ברציפות kפעמים. n=1 ולהפך ,אם fהיא רציפה וגזירה kפכמעם כאשר ) f (kרציפה למקוטעין ומתקיים f (i) (0) = f (i) (2π) :לכל i = 0, . . . , k − 1אז .nk an , nk bn ∈ ℓ2 בפרט ,אם fחלקה ו f (i) (0) = f (i) (2π) :לכל iאז: ∞ < )| nk (|an | + |bn ∞ X n=1 Fourierירוט 5.קרפ 47 לכל .kוזה שקול ל: |bn | , |an | ≤ ck n−k ∃ck ∀k ולהיפך ,אם anו bnמקיימיפ את הנ״ל אז טור פורייה המתאים מגדיר פונקציה מחזורית וחלקה. במקום להסתכל על פונקציות שמוגדרות ב ] [0, 2πניתן להסתכל על פונקציות מחזורות ).f (x + 2π) = f (x הערה 5.3.7אם fמחזוריתf (x) dx : ´b a = f (x) dx 2π ´ 0 כאשר .b − a = 2π :ולכן ,בהגדרה של :an , bn l+2π ˆ f (x) cos (nx) dx 1 = ) an (f π n>0 l כמו כן ,לכל kקיים n0כך ש . |an (f )| , |bn (f )| ≤ n−k פונקציה מחזורית חלקה גוררת כיbn (f ) , an (f ) < ck,f n−k : ∀kולהפיך גם מתקיים תנאי דיריכלה להתכנסות נקודתית. )ak (f ) cos (kx) + bk (f ) sin (kx n X k=1 }f |{z = ) ←− Snf (x) = a0 (f בממוצע אנו רוצים תנאי לוקאלי להתכנסות נקודתית )מקודם היה גלובלי(. משפט 5.3.8דיריכלה נניח f : R → Rפונקציה מחזורית ואינטגרבילית רימן ב ] .[0, 2πעבור x0 ∈ Rנניח שקיים A ∈ Rכך ש: 1 ) f (x0 + u) + f (x0 − u − A ⇒⇐ ∞ < sup 2 ||u u∈R ) f (x0 + u) + f (x0 − u 1 sup − A ∞< 2 ||u 0<|u|≤δ אז.Snf (x0 ) → A : הערה ,A 5.3.9אם קיים ,הוא יחיד) .אם A, A′מקיימים אז: | |A − A′ < ∞ ⇒ A = A′ u |u|≤1 sup )]f |[0,2π] ∈ H ([0, 2π Fourierירוט 5.קרפ 48 הערה 5.3.10אם fגזירה מימן ומשמאל ב x0כלומר: ) f (x0 + h) − f (x0 h )f (x0 ) − f (x0 − h h lim h>0 h→0 =f ′ (x0 + 0) : lim h>0 h→0 =f ′ (x0 − 0) : אז התנאי מתקיים עבור: 1 ))(f (x0 + 0) + f (x0 − 0 2 =A בפרט, −π < x < π x = ±π x 0 ( = )f (x ) Snf (x) → f (xנקודתית. תזכורת 5.3.11עבור fכנ״ל sfnלא מתכנס ל fבמ״ש כי fלא רציפה. )הגבול Snf (x0 ) → Aתלוי רק במחלקת השקילות .התנאי עם ה supלא תלוי במחלקת השקילות אלא ב fספציפית כי אותו טור עבור פונקציה באותה מחלקת שקילות(. sfn הוא הוכחה) :למשפט דיריכלה( = ))(am (f ) cos (mx) + bm (f ) sin (mx n X Snf (x) = a0 (f ) + m=1 2π ˆ n 1 X f (t) dt + = f (t) (cos (mt) cos mx + sin (mt) sin (mx)) dt π m=1 ˆ2π 0 ˆ2π ˆ2π n 1 X 1 = f (t) cos (m (x − t)) dt f (t) Dn (x − t) dt 2π m=−n 2π 0 כאשרcos (mx) : n P 0 = f (t) cos (m (x − t)) dt 1 2π 0 2π ˆ n X m=1 0 1 π f (t) dt + ˆ2π 1 2π 0 = Dn (x) :והיא נקראית גרעין .Dirichletניתן לחשב אותה .נבחין כי היא פונקצייה זוגיתDn (x) = : m=−n )) Dn (−xהרי סכום של קוסינוסים ,וקוסינוסים זוגיים( .והיא גם מחזורית )שוב ,סכום של קוסינוסים( .ומתקייםDn (t) dt = 1 : 2π ´ 0 1 2π כיוון שאנו יודעים כי האינטגרל של כל קוסינום הוא 0פרט למקרה בו m = 0ואז נקבל באמת .1 נחשב את .Dnמדובר למעשה בטור גיאומרטי ,למה? נוסיף ) .i sin (mxלמה מותר? כי היא אי זוגית ,ולכל mקיים גם −mבטור ולכן סה״כ הוספנו אפס .וכמו כן עבור m = 0נקבל זהותית .0 ei(n+1)x − e−inx eix − 1 = }|{z טור גיאומטרי עם q = aeix eimx n X m=−n = ))(cos (mx) + i sin (mx n X = )Dn (x m=−n נכפול ונחלק ב e−ix/2ונקבל: 1 1 sin n + 21 x 2i sin n + 21 x e−ix/2 ei(n+1)x − e−inx ei(n+ 2 )x − e−i(n+ 2 )x = )= Dn (x = = = )2i sin (x/2 )sin (x/2 )e−ix/2 (eix − 1 eix/2 − e−ix/2 Fourierירוט 5.קרפ 49 )Dn (x x נבחין כי: = f (x − t) Dn (t) dt )f (x + t) + f (x − t Dn (t) dt 2 ˆ2π ˆ2π 0 1 }f (x − t) Dn (t) dt |{z = 2π fמחזורית 1 = f (x + t) Dn (t) dt 2π ˆ2π 0 ˆx }f (t) Dn (x − t) dt |{z = t7→x−tx−2π 1 2π ˆ2π 1 = )(x 2π Snf 0 0 וכמו כן: ˆπ 1 1 )f (x0 + t) + f (x0 − t t )1 f (x0 + t) + f (x0 − t sin n + t d = − A Dn (t) dt −A 2 2π t 2 sin t/2 2 {z } | −π ˆ2π 1 = (x0 )−A 2π Snf 0 )h(t t cos (nt) dt 2 h (t) sin ˆπ −π 1 t h (t) cos sin (nt) dt + 2 2π ˆπ −π 1 2π fאינטגרבילית רימן ,ולכן fחסומה ורציפה כמעט תמיד .ולכן h ,רציפה כמעט תמיד .ולפי ההנחה hחסומה. לכן h ,אינטגרבילית רימן ב ] [−π, πוגם h (t) cos 2t :ו h (t) sin 2t :אינטגרביליות רימן ב ].[−π, π ולכן: t cos (nt) dt → 0 2 h (t) sin ˆπ t h (t) cos sin (nt) dt, 2 −π ) f (x0 +t)+f (x0 −t )(x0 −t A = lim f (x0 +t)+fובפרט− A : )אם Aקיים אז: 2 2 ש Aהוא הגבול הנ״ל. )f (x0 +0)+f (x0 =0 = .A בפרט אם ) f (x0 − 0) , f (x0 + 0קיימים אז: 2 ˆπ −π 1 t )(x0 −t f (x0 +t)+fובוודאי חסומה ⇐ |− A ≤ C |t 2 וריאציה של המשפט היא עקרון הלוקאליזציה: משפט 5.3.12 נניח ש f, gמחזוריות אינטגרביליות רימן ב ] x0 ∈ R .[0, 2πוקיים δ > 0כך ש: )f |(x0 −δ,x0 +δ) ≡ g |(x0 −δ,x0 +δ 50 Fourierירוט 5.קרפ נוכל להגיד כי: lim Snf (x0 ) − Sng (x0 ) = 0 ∞→n בפרט ,אם ) lim Snf (x0קיים אז ) lim Sng (x0קיים והם שווים. ∞→n ∞→n הוכחה: (f (x0 − t) − g (x0 − t)) Dn (t) dt ˆπ −π 1 = ) (x0 2π Sng (x0 ) − Snf נפצל את האינטגרל ונקבל )תוך שימוש בהנחה שהפונקציה מתאפסת עבור :(|t| < δ (f (x0 − t) − g (x0 − t)) Dn (t) dt ˆπ (f (x0 − t) − g (x0 − t)) Dn (t) dt + δ ˆ−δ 1 = 2π −π שוב את אותו טריק: )f (x0 − t) − g (x0 − t 1 t sin n + 2 sin 2t | {z } אינטגרבילית רימן ˆ−δ −π 1 2π ובדיוק כמו קודם זה שואף ל 0כאשר ∞ → .n הטענה הבאה קצת יותר כללית: טענה 5.3.13למת רימן־לבג אם fאינטגרבילית רימן ב ] [a, bאזf (x) sin (λx) dx → 0 : הוכחה :נגדיר f (x) sin (λx) dx −→ 0 λ→x ´b a ´b a כאשר ∞ → .λ | אינטגרבילית רימן f = .V אנו רוצים להוכיח ש )].V = H ([a, b נשים לב ש Vתת מרחב סגור .כלומר :אם fn → fבממוצע ו fn ∈ Vאז גם .f כמו כן ,נבחין שאם: b ˆ ˆb √ ≤ f (x) sin (λx) dx ≤ |f (x)| dx b − a kf k2 }|{z a קושי שוורץ a נניח ש fn → fבממוצע: b b b b ˆ ˆ ˆ ˆ √ f (x) sin λxdx ≤ (f (x) − fn (x)) sin (λx) dx + f (x) sin (λx) dx ≤ b − a kf − fn k + fn (x) sin λxdx a a a a ´ לפי ההנחה kf − fn k < εעבור .n ≫ 1נקבע nכנ״ל .כיוון ש fn ∈ Vקיים λ0שעבור λ > λ0מתקיים fn (x) sin λx < ε ובסה״כ נקבל כי: ˆ √ b−a+a ε < f (x) sin (λx) dx 51 Fourierירוט 5.קרפ עבור .λ > λ0 כיוון ש Vסגור ומרחב פונקציות המדרגה צפוף ב )] H ([a, bאז מספיק לבדוק שכל הפונקציות מדרגה שייכת ל .V ´β לכן מספיק לבדוק sin λxdx −→ 0 :לכל α < βנבחין כי: λ→0 α )cos (λβ) − cos (λα →0 λ = sin (λx) dx ˆβ α 5.4שיטות סכימה נניח ש ) anעבור (n = 0, 1, 2, . . .סדרהaj . n P i=0 1 n+1 = .bnאנו יודעים כי אם an → aאז ) .bn → aסכומי (Cesaro ההפך הוא לא נכון .אם bnמתכנסת זה לא אומר ש anמתכנסת. במקרה של טורי פורייה Snfנקבל: n 1 X f )S (x n + 1 j=0 j מה אנו יכולים להגיד על )?σnf (x נבחין כי גם σnfהיא פולינום טריגונומטרי. f (t) Kn (x − t) dt כאשר )Dj (x n P j=0 1 n+1 ˆ2π 0 = )σnf (x σnfתלוי רק ב . b1 , . . . , bn ,a0 , . . . , anבאופן ספציפי אנו יכולים לרשום באופן הבא: 1 = f (t) Dj (x − t) dt 2π ˆ2π 0 n n 1 X 1 1 X f = )Sj (x = )(x n + 1 j=0 n + 1 j=0 2π σnf = ) Kn (xוהוא נקרא גרעין .Féier הערה 5.4.1זו למעשה קונבולוציה: f (t) Kn (x − t) dt ˆ2π 0 = )f ∗ Kn (x נחשב אותו: 1 n 1 X sin j + 2 x n + 1 j=0 sin x2 = )Kn (x נבחין כי: 1 ix n X 1 )cos ((n + 1) x) + i sin ((n + 1) x ei(n+1)x − 1 1 ei(n+1+ 2 ) − e 2 ei(j+ 2 )x = Im = Im x = Im = Im ix = sin j + ix ix − 2 e − 1 2i sin x/2 2 2 e −e j=0 j=0 sin2 n + 21 x )1 − cos ((n + 1) x = 2 sin x2 sin x2 n X כלומר ,נקבל כי: 1 sin2 n + 12 x = )Kn (x n+1 sin2 x2 52 Fourierירוט 5.קרפ גם Knהיא פונקצייה מחזורית זוגית .וכמו כן .Kn (x) ≥ 0וכמו כן: Kn (x) dx = 1 ˆ2π 0 לכל δ > 0ו π ≥ |x| ≥ δ :מתקיים· Cδ : 1 n+1 ≤ |) |Kn (xכאשר: δ 2 1 sin2 = Cδוכאשר ∞ → nזה שואף אוניפורמית ל . 0 כלומר Kn → 0במ״ש ב ].[δ, π משפט 5.4.2 אם )f (x0 +h)−f (x0 −h 2 = Aקיים אז.σnf (x0 ) −→ A : lim h→0 h 6= 0 ∞→n הערה 5.4.3בפרט אם ) f (x0 + 0ו ) f (x0 − 0קיימים אז: מתכנס לכל .x )f (x0 +0)+f (x0 −0 2 = ,Aוכמו כן אם fרציפה למקוטעין אז )σnf (x )(x0 −u − A n1 f (x0 +u)+fחסום ,תנא דיריכלה(. )קודם היה תנאי יותר חזק : 2 בפרט ,אם fרציפה ב x0אז ) .σnf (x0 ) → f (x0 הוכחה: )f (x0 + t) + f (x0 − t K0 (t) dt 2 ˆπ = f (x0 + t) Kn (t) dt ˆπ Knזוגית { |} z = }f (x0 − t) K0 (t) dt |{z t7→−t −π −π )(x0 −t − A f (x0 +t)−fעבור |t| ≤ δ יהי ,ε > 0ותהי δ > 0כך ש < ε 2 ˆδ ˆ )f (x0 + t) + f (x0 − t − A Kn (t) dt = + 2 |t|≥δ −δ ˆπ −π ˆπ −π = f (t) Kn (x0 − t) dt = σnf (x0 ) − A נסמן: )f (x0 + t) + f (x0 − t −A 2 = )h (t נבחין כי: δ ˆ ˆδ ˆδ ˆπ h (t) Kn (t) dt ≤ |h (t)| Kn (t) dt < ε Kn (t) dt < ε Kb (t) dt = ε −π כמו כן: −δ −δ −δ π ˆ ˆπ ˆπ 0 h (t) Kn (t) dt ≤ |h (t)| Kn (t) ≤ sup K ✯ ✟ ✟n |h (t)| dt ✟ ][δ,π ✟ δ δ δ אבל hאינטגרבילית רימן כי היא חסומה ורציפה כמעט תמיד .ולכן נקבל כי הכל הולך ל 0כנדרש. −δ ´ באותו אופן בדיוק: . −π ˆπ −π = ) (x0 σnf קרפ5. ירוטFourier 53 משפט פייר5.4.4 משפט . במ״שσnf (x) → f (x) אז, רציפהf נניח ש :הוכחה σnf (x) = ˆπ f (x + t) Kn (t) dt −π σnf (x) − f (x) = ˆπ −π [f (x + t) − f (x)] Kn (t) dt :נקבל במקרה זה. ∀ |t| < δ, ∀x |f (x + t) − f (x)| < ε כך שδ > 0 קייםε > 0 יהי. לכן רציפה במ״ש, רציפה בקטע סגורf δ ˆδ ˆ ˆδ ˆπ h (t, x) Kn (t) dt ≤ |h (t, x)| Kn (t) dt < ε Kn (t) dt < ε Kb (t) dt = ε −δ −δ −π −δ π ˆ ˆπ ˆπ 0 h (t, x) Kn (t) dt ≤ |h (t, x)| Kn (t) ≤ sup K ✯ ✟ ✟n |h (t)| dt ✟ [δ,π] ✟ δ δ δ |h (t, x)| ≤ 2 max |f | נקבל כי Hardy 5.4.5 משפט .Sn → σ אז גםσn → σ אם.σn = 1 n n P Sk : וSn = k=1 n P k=1 ck : נסמן.k | לכלck | ≤ M k סדרהck נניח ש :m > n לכל:הוכחה m X X k n X X X m m cj = Sk − (m − n) Sn = (Sk − Sn ) = Sk − |mσm − nσn − (m − n) Sn | = k=n+1 j=n+1 k=1 j=1 k=n+1 X m m 2 X X m M M (m − n) ≤ (m − n) |c | ≤ (m − n) (m − j + 1) c ≤ j j j n j=n+1 j=n+1 j=n+1 :כלומר m mσm − nσn ≤ M − S − 1 n m−n n mσm − nσn ≤ Mε − S n m−n mσm − nσn mσm − nσn − Sn + − σ |Sn − σ| ≤ m−n m−n : ואזm = n + [εn] : נקחε > 0 יהי :נבחין כי Fourierירוט 5.קרפ 54 )אי שיוויון המשולש ,צריך להפוך למעשה את המינוס באחד מהם כדי שיראה הגיוני(. נחשב: ) m (σm − σ) − n (σn − σ mσm − nσn | ≤ m |σm − σ| + n |σn − σ = − σ m−n m−n m−n m−n הביטויים בערכים המוחלטים שואפים ל ,0אנו רוצים לראות כי המקדמים לא מקלקלים את זה. נבחין כי: 11+ε )1 n (1 + ε ≤ 2 nε 2 ε ≤ }|{z עבור 10 ε >n )n (1 + ε m = m−n nε − 1 כמו כן: n m 11+ε ≤ < m−n m−n 2 ε נבחר n0כך ש |σn − σ| < ε2לכל n > n0ועבור ] m = n + [nεמתקיים: )4ε2 (1 + ε < (M + 5) ε ε |Sn − σ| ≤ M ε + וכמובן זה גורר כי Sn → σ :כנדרש. איך זה קשור לטורי פורייה? נתבונן בטור: ))(an cos (nx) + bn sin (nx ∞ X a0 + n=1 סדרת הסכומים שלו היא: ))(ak cos (kx) + bk sin (kx n X Snf (x) = a0 + k=1 מסקנה 5.4.6 נניח ש fמחזורית ,אינטגרבילית רימן ב ] x0 ∈ R .[−π, πו(f (x0 + h) + f (x0 − h)) : אם בנוסף ,קיים Mכך ש M n lim 1 h→0 2 = Aקיים. ≤ | |an | , |bnלכל n ≥ 1אז.Snf (x0 ) → A : הוכחה :ראינו שסדרת הממוצעים של ) Snf (x0מתכנסת ל) Aאם הוא קיים( ואז ממשפט קודם עבור הממוצעים של ) Snf (x0והעובדה |ak cos (kx0 ) + bk sin (kx0 )| ≤ 2Mנקבל כי הטור מתכנס. שk : משפט 5.4.7 אם fבעלת השתנות חסומה ב]) [−π, πאו באופן שקול בכל קטע ] [a, bכך ש (b − a ≥ 2πאז קיים Mכך ש : .n ≥ 1 תזכורת 5.4.8נאמר שפונקציה fבקטע ] [a, bהיא בעלת השתנות חסומה אם: ∞ < |) |f (ti+1 ) − f (ti n X i=1 sup a=t0 <...<tn =t =f b _ a ≤0 M n ≤ | |an | , |bnלכל 55 דוגמה 5.4.9עבור מקום שזה לא קורה.f (x) = sin x1 : Fourierירוט 5.קרפ Fourierירוט 5.קרפ 56 הערה 5.4.10 .1אם fמונוטונית אז fבעלת השתנות חסומה. .2אם f, gבעלות השתנות חסומה אז f + g, f − g, λfבעלות השתנות חסומה. .3 g b _ f+ a b _ ≤ )(f + g a b _ a .4יש פונקציות רציפות שאינן בעלות השתנות חסומה .לדוגמה: 1 x x sin עבור α > 0מספיק קטן היא לא תהא בעלת השתמנות חסומה. .5אם fגזירה ב ] [a, bו f ′ :חסומה ,אז ל fיש השתנות חסומה. הוכחה :מכיוון ש אז: |) |f ′ (ξi )| |(ti − ti−1 n X i=1 n X |f ′ (ξi ) (ti − ti−1 )| = sup i=1 )למעשה מספיק ליפשיצית( |f (ti ) − f (ti−1 )| = sup | {z } ) f ′ (ξi )(ti −ti−1 .6כל פונקציה בעלת השתנות חסומה היא הפרש של שתי פונקציות מונוטוניות. הוכחה: )g(x {! |} } {z )f − f (x x _ z a − | f x _ = )f (x a }|{z מונוטונית עולה פונקציה מונוטונית עולה גם כן מדוע? כיוון שלכל a < b < cמתקיים: f c _ f+ b _ a b =f c _ a ולכן ,לכל x ≤ yמתקיים: )−f (x x _ a ? ≥ )f − f (y y _ a ולכן: )f ≥ f (y) − f (x y _ x אבל זה ברור כי: |)sup . . . ≥ |f (y) − f (x n X i=1 sup a=t0 <...<tn =t Fourierירוט 5.קרפ 57 מסקנה 5.4.11 כל פונקציה בעלת השתנות חסומה היא אינטגרבילית רימן ורציפה מחוץ לקבוצה בת־מנייה .וגזירה כמעט תמיד )!( )אנו נוכיח זאת בהמשך(. וקיימת פונקציה מונוטונית fרציפה לא קבועה כך ש f ′ = 0כמעט תמיד. טענה 5.4.12 אם fמחזורית ובעלת השתנות חסומה אז :קיים Mכך ש M n ≤ |) |an (f )| , |bn (fלכל .n > 0 הוכחה :נזכור שעבור fרציפה וגזירה למקוטעין: f ′ (x) cos (nx) dx ˆ2π 0 1 1 f (x) sin (nx) dx = − f cos (nx) |2π 0 + n n ˆ2π 0 בה״כ fמונוטונית עולה. נראה שלכל פונקציה גזירה ברציפות ומחזורית gב ][−π, π f (x) g ′ (x) dx ≤ f g |ba − ≤ f g |ba + (f (b) − f (a)) sup |g (x)| dx | {z ]} x∈[a,b f b W ˆπ −π a נקרב את האינטגרל ע״י סכומי רימן .כל חלוקה a ≤ t0 ≤ . . . ≤ tn = bנמצא ti−1 ≤ ξi ≤ tiכך שסכום רימן: X f (ξi ) g ′ (ξi ) (ti − ti−1 ) ≤ RHS בגבול נקבל את אגף שמאל. נבחר את ξiכך ש ) g (ti ) − g (ti−1 ) = g ′ (ξi ) (ti − ti−1ץ n−1 X ≤ )g (ti+1 ) (f (ξi+1 ) − f (ξi )) + f (b) g (b) − f (a) g (a − i=0 = }|{z נוסחת הסכימה של Abel n−1 X X ||g (ti+1 )| (f (ξi+1 ) − f (ξi )) + f g |ba ≤ max |g (f (ξi+1 ) − f (ξi )) + f g |ba | {z } i=0 )≤f (b)−f (a n X )) f (ξi ) (g (ti ) − g (ti−1 i=1 הערה 5.4.13הסכימה פה כנראה לא נכונה .אולי זה צריך להיות ) f (ξ0במקום ) f (aבמעבר הראשון אבל זה רק גדול יותר. בכל מקרה ,יש לי תחושה שיש בעיה עם האינדקסים בסכימה .לא אמורים לשנות את זה ל.i = 0 באופן יותר כללי לכל .fרק שנציב f b W a במקום ).f (b) − f (a במקרה שלנו g (x) = sin (nx) :או g (x) = cos (nx) :ו . [a, b] = [−π, π] :נקבל: |)n |an (f )| ≤ 2 |f (b) − f (a)| + |f (b)| + |f (a וזה חסום ,באופן דומה ל .bn מסקנה 5.4.14 אם fבעלת השתמות חסומה אז: 1 ))(f (x + 0) + f (x − 0 2 → )Snf (x Fourierירוט 5.קרפ 58 )הגבולות הימניים והשמאליים קיימים כי fהיא הפרש של שתי פונקציות מונוטוניות(. )(x0 −h − lim f (x0 +h)+fלא בהכרח מתקיים עבור פונקציה מונוטונית) .למשל אם ∞ = )f ′ (x0 + 0 הערה 5.4.15התנאי ≤ Ch 2 או ∞ = ) f ′ (x0 − 0אז התנאי הנ״ל לא מתקיים(. כלומר המסקנה היא חדשה ־ לא מכוסה ע״י המשפטים הקודמים. תיקון קטן טענה 5.4.16 fפונקציה מונוטונית ב ] g ,[a, bגזירה ברציפות אז: b ˆ |) f (x) g ′ (x) dx − (f (b) g (b) − f (a) g (a)) ≤ max |g| |f (b) − f (a ][a,b a באופן יותר כללי ,אם fבעלת השתנות חסומה ב ] [a, bו gגזירה ברציפות ב ] [a, bאזי: b ˆ b _ f (x) g ′ (x) dx − (f (b) g (b) − f (a) g (a)) ≤ max |g| f a a | {z } אם fגזירה ברציפות f ′ (x)g(x)dx ´b a − השתמשנו עבור ) g = sin (nxוקבלנו: π ˆ π _ f (x) cos (nx) dx ≤ 1 f n −π −π עבור n > 0וגם: π ˆ π _ f (x) sin (nx) dx ≤ 1 f n −π −π )תחת ההנחה ש fבעלת השתנות חסומה ב ] .([−π, πהוכחה :לכל ε > 0תהי δ > 0כך ש: n ˆb X ′ ′ <ε f (ξ ) g (ξ ) (t − t ) − f )(x g )(x dx i i i i−1 i=1 a לכל חלוקה: a = t0 < t1 < . . . < t n = b ו: ti−1 < ξi < ti לכל i = 1, . . . , nופרמטר החלוקה max |ti − ti−1 | < δ נקח בפרט ξiכך ש ) g (ti ) − g (ti−1 ) = g ′ (ξi ) (ti − ti−1 נקבל: n ˆ X f (ξ ) (g (t ) − g (t )) − f g′ < ε i i i−1 i=1 קרפ5. ירוטFourier 59 : מסכימת אבל נקבל,מצד שני n X i=1 f (ξi ) (g (ti ) − g (ti−1 )) = f (b) g (b) − f (a) g (a) − n X i=0 g (ti ) (f (ξi+1 ) − f (ξi )) .ξn+1 = b : וξ0 = a כאשר :מכאן n ˆ X ˆ X n b ′ ′ f g − f g| ≤ f (ξ ) (g (t ) − g (t )) − f g g (t ) (f (ξ ) − f (ξ )) + i i i−1 i i+1 i a i=1 i=0 | {z } <ε : אנו יכולים להכניס את הערך המוחלט ונקבל,ואילו עבור הסכום השני b n n X X _ |g (t )| |f (ξ ) − f (ξ )| ≤ max |g| f g (t ) (f (ξ ) − f (ξ )) ≤ i i+1 i i i+1 i a i=0 i=0 כלומר ˆ b _ f g ′ − f g|b ≤ max |g| f + ε a a ˆ b _ f g ′ − f g|b ≤ max |g| f a a : נקבל כיε ומכיוון שזה נכון לכל פרק 6 אפליקציות של טורי פורייה 6.1 משוואת החום בהינתן מוט ברזל ,אנו רוצים לדעת את הטמפרטוררה במוט כפונקציה של הזמן ושל המקום. נסמן ב: הטמפרטורה בזמן tבקואורדינטה u (x, t) = x כאשר L) 0 ≤ x ≤ Lאורך המוטר( ו .0 ≤ t אנו מניחים שהמוט מבודד מהסביבה למעט בנקודות הקצה .בהן היא נקבעת באופן חיצוני .כלומר: )g (t )h (t = )u (0, t = )u (L, t כאשר g, hפונקציות ידועות .מסתבר כי ) u (x, tמקיימת את המשוואה הדיפרנציאלית החלקית הלינארית )לינארית ־ סכום של שני פתרונות גם הוא פתרון( הבאה: ut = αuxx 2 ut = ∂uו.uxx = ∂∂xu2 : כאשר ∂t נרצה לפתור את המשוואה הזאת כדי לפתור משוואה חלקית ,אנו צריכים תנאי התחלה על כל המרחב ,לכן נוסיף תנאי התחלה: )u (x, 0) = f (x כלומר ,יש לנו כעת שלושה תנאים ,הטמפרטורה בזמן 0והטמפרטורה בקצוות בכל רגע נתון .נרצה לשאול מה היא ) u (x, tהמקיימת את כלל התנאים הנ״ל? לשם פשטות L = π :ונניח כי ) g ≡ h ≡ 0זו הנחה מאוד משמעותית(.ולשם קונסיסטניות נקבל כי f (0) = g (0) :וגם .f (L) = h (0): נשים לב ש u (x, t) = ax + bפתרון .לכן אפשר לקבל את המקרה המקרה g ≡ a′ :ו . h ≡ b′ מכיוון שהמשוואה לינארית ננסה למצוא פתרונות ״מיוחדים״ ולמצוא קומבינציות לינאריות )או טורים אינסופיים( שלהם אשר מקיימות את תנאי השפה. 6.2 פתרונות ״מיוחדים״ מהם אותם פתרונות ״מיוחדים״? אחד ה״טריקים״ היותר פופולריים ואפקטיביים הוא הפרדת משתנים .נחפש פתרון בסגנון.u (x, t) = X (x) T (t) : 60 61 היירופ ירוט לש תויצקילפא 6.קרפ המשוואה על uנותנת: )X (x) T ′ (t )X ′′ (x) T (t ut = = uxx לכן ,על מנת ש uתקיים את משוואת החום נדרש כי: )X (x) T ′ (t) = αX ′′ (x) T (t ∀x, t בהנחה שהם לא מתאפסים נקבל: ′′ ′ )X (x )T (t = )αT (t )X (x אבל מכיוון שאגף ימין תלוי רק ב xואילו אגף שמאל רק ב tלכן התוצאה היא בהכרח קבוע −λכלשהו .כלומר: )T ′ (t )X ′′ (x = ≡ −λ )αT (t )X (x כעת המצב יותר פשוט ,מכיוון שמדובר למעשה בשתי משוואות דיפרנציאליות רגילות: ( X ′′ = −λX T ′ = −λαT עבור המשוואה של Tנקבל: T (t) = ce−λαt כאשר cקבוע כלשהו. נזכור את תנאי השפה: u (0, t) = u (π, t) = 0 ⇒ X (0) = X (π) = 0 כלומר ,אנו מחפשים פתרונות עבור Xאשר מתאפסים בקצוות .הפתרונות הן: אם λ < 0הפתרונות הם: √ −λx + Ce− √ −λx X (x) = Be אם בנוסף X (0) = X (L) = 0 :נקבל כי בהכרח .B = C = 0 באופן דומה עבור λ = 0נקבל X (x) = Ax + B :אבל אין פונקציה לינארית אשר מתאפסת בשתי נקודות לכן בהכרח .X = 0 עבור λ > 0כן נקבל פתרונות ,למעשה sinו cosומהם אנו יכולים לגזור פתרונות אשר יהוו בסיס למרחב הפתרונות. הערה 6.2.1נבחין כי: )F (x + h) + F (x − h )− F (x 2 1 1 ′′ F (x) = lim 2 h→0 h 2 כאמור ,עבור λ > 0נקבל: נקבל את המטריצה: √ √ X (x) = B sin λx + C cos λx ! 1 B 0 √ = C 0 cos λπ 0 √ λπ sin 62 היירופ ירוט לש תויצקילפא 6.קרפ √ √ sinוזה כמו בן אם״ם λ = 0, 1, . . . כלומר ,יש פתרון לא טריוויאלי אם״ם λπ = 0 כלומר.λ = n2 : והפתרון שלנו הוא למעשה .sin (nx) :כלומר: t 2 sin (nx) e−αn הוא פתרון ל αuxx = utהמקיים את תנאי השפה לכל .n = 1, 2, . . . נבחין כי אנו מקבלים כי.u (x, 0) = sin (nx) : 6.3 וכעת ,באופן כללי באופן כללי יותר ,נסתכל על: t 2 cn sin (nx) e−αn ∞ X n=1 ונבחין כי עבור t = 0אנו למעשה מקבלים טור פורייה .ונזכור כי ראינו בתרגיל כי ) sin (nxעבור n = 1, 2, . . .מערכת שלמה ב )] .CL2 ([0, πנרצה למצוא פתרון עבור תנאי ההתחלה ) .u (x, 0) = f (xעל מנת לתת לזה סיכוי ,ננסה לקבוע את cnבתור מקדמי הפורייה של ) f (xכלומר: f (x) sin (nx) dx ˆπ 2 = cn π 0 משפט 6.3.1 נניח ש fפונקציה רציפה ,גזירה למקוטעין ברציפות.f (0) = f (π) = 0 . הטור: t 2 cn sin (nx) e−αn ∞ X n=1 מתכנסת בהחלט במידה שווה עבור 0 ≤ x ≤ πלכל t ≥ 0לפונקציה רציפה ומקיים: )u (x, 0) = f (x ∀0 ≤ x ≤ π וגם u (0, t) = u (π, t) = 0 :לכל .tכמו כן ,לכל t > 0הפונקציה ) u (x, tחלקה ב ) (x, tו ut = αuxx :לכל t > 0ולכל .0 ≤ x ≤ π הוכחה :בתנאים על fהוכחנו שהסכום ∞ < | |cn ברור ש: ∞ X n=1 )חישבנו את הנגזרת ,וראינו כי ∞ < |ncn |2 ∞ X ,אלו הם המקדמים של .(f ′ n=1 ∞ ∞ X X 2 | |cn ≤ cn sin (nx) e−αn t n=1 n=1 ולכן ,ממשפט ווירשטרס נקבל כי הטור הנ״ל מתכנס בהחלט במ״ש לפונקציה רציפה ב ) (x, tעבור t ≥ 0ו.0 ≤ x ≤ π : לכן ,אנו יודעים כי: ∞ X )cn sin (nx) → f (x n=1 כי הטור מתכנס )ולכן סדרת הממוצעים מתכנסת ל ).(f (x = )u (x, 0 63 היירופ ירוט לש תויצקילפא 6.קרפ נשים לב שעבור t > 0נקבל כי≪ n−k : t 2 ≤ ce−αn t 2 cn · e−αnלכל .kכלומר ,הטור פורייה: ∞ X 2 )cn e−αn t sin (nx n=1 מייצג פונקצייה חלקה. כשמסתכלים על הטור: t ∞ X 2 cn sin (nx) e−αn n=1 אפשר לגזור אותו איבר איבר מכסל סדר ב x, tמכיוון ש: j −αn2 t )sin (nx )cos (nx 2 e−αn הטור הנ״ל מתכנס בהחלט במ״ש )המקדמים חסומים ע״י t ( ∞ X ∂ i+j u ± cn n i = ∂xi ∂tj n=1 2 .nl e−αn משפט כללי⇐ uגזירה מכל סדר עבור t > 0וכל נגזרת ניתנת ע״י סכום הנגזרות של הטור. בפרט: t 2 cn n2 sin (nx) e−αn ∞ X ut = −α n=1 t ∞ X 2 cn n2 sin (nx) e−αn n=1 uxx = − כלומר אכן קיבלנו: ut = αuxx אם רק מניחים ש fאינטגרבילית רימן ,אז השלמה למשפט t 2 cn sin (nx) e−αn ∞ X עדיין טור מתכנס בהחלט עבור t > 0ומתכנס n=1 בהחלט במ״ש עבור t ≥ δלכל .δ > 0כלומר ) u (x, tפונקציה חלקה לכל t > 0ומתקיים ut = αuxxעבור .t > 0 מה ניתן להגיד עבור ?t = 0 נבחין כי u (x, t) −→ t :התכנסות בממוצע .כלומר: t→0 2 (u (x, t) − f (x)) dx → 0 ˆπ 0 כאשר .t → 0הסיבה לכך היא משיוויון פרסבל מתקיים: 2 2 c2n e−αn t − 1 −→ 0 t→0 מכיוון ש −→ 1 t→0 t 2 ∞ X e−αnוגם ∞ < c2n n=1 ∞ X n=1 ולכן הנ״ל מתקיים .הוכחה כתרגיל. פרק 7 טרנספורם פורייה הערה 7.0.2החומר לא מופיע בספר של יורם לינדנשטראוס ״חשבון אינפיניטסימלי מתקדם״ אבל הוא כן קיים בספר שלו משנות השבעים בשם ״אנליזה פונקציונלית״ )כנראה(. לחילופין.Körner - Fourier Analysis : 7.1 מבוא באופן כללי מדובר בהכללה רציפה של טורי פורייה .כלומר ,במקום לדבר על טורים ,נדבר על אינטגרלים. עד כה הסתכלנו על פונצקיות בקטע ] ,[0, 2πלמעשה דיברנו על פונקציות מחזוריות .אבל לא ברור לנו כי זה טבעי להצטמצם על פונקציות מחזוריות. נרצה להסתכל על פונקציות יותר כלליות. במקום ) sin (nxו cos (nx) :כאשר n ∈ Nנסתכל על ) sin (λxו ) cos (λxכאשר .λ ∈ R ההבדלים הם ,שמקודם הייתה לנו סדרה דיסקרטית של פונקציות ,n ∈ Nועכשיו λ ∈ Rהוא פרמטר רציף.וכעת ,במקום טור יהיה לנו אינטגרל. אנו נראה כי לכל טענה על טור פורייה יהיה לנו איזשהו אנאלוג לטרנספורם פורייה. על מנת להסביר את המעבר הנ״ל מדיסקרטי לרציף. 7.2הצגה מרוכבת של טור פורייה כפי שראינו בתרגול ,עדיף לנו להשתמש במספרים מרוכבים במקרה זה .כאשר נזכור כי: )eiθ = cos θ + i sin (θ נרשום: ∞ ∞ X X X = )An sin (nx = bn sin (nx) = f = An einx An cos (nx) + i n=0 n∈Z n=1 n=1 ∞ ∞ X X )(An − A−n ) sin (nx (An + A−n ) cos (nx) + i A0 + n=1 n=1 ∞ X ומתקיים: A0 = a0 An + A−n = an i (An − A−n ) = bn 64 an cos (nx) + ∞ X n=0 65 היירופ םרופסנרט 7.קרפ במקרה הזה ,הרישומים שקולים. כלומר :עבור n > 0 ) An = 12 (an − ibn ) A−n = 12 (an + ibn ( נשים לב שאם fהיא פונקציה ממשית אז ) An ∈ Cלאו דווקא (An ∈ Rאבל .A−n = An הערה 7.2.1אם fזוגית וממשית אזי . An ∈ R אפשר להסתכל על f : R → Cמחזורית .כלומר: ) f = Re (f ) + i Im (f כאשר Ref, Im f : R → Rמחזוריות. נרצה להגדיר את המקדמי Anשל fנקבל עבור n > 0כי מתקיים: π ˆ ˆπ ˆπ 1 1 1 = ) An = (an − ibn f (x) cos (nx) dx − = f (x) sin (nx) dx f (x) e−inx dx 2 2π 2π −π −π −π נבחין כי השיוויון עובד גם עבור n = 0וגם עבור n < 0כי אז: ˆπ ˆπ ˆπ 1 1 1 = f (x) cos (nx) dx + i f (x) sin (nx) dx f (x) einx dx = ) = (an + ibn 2 2π 2π −π A−n −π −π אבל מכיוון שלקחנו −nולא nאזי נקבל כי למעשה גם כאן: f (x) e−inx dx ˆπ 1 = An 2π −π כאמור ,זה נכון לכל .n ∈ Z נשים לב שאם נזיז את xבאיזשהי αנקבל כי: ein(x+α) = einα einx כלומר einx ,היא פונקציה עצמית )או ווקטור עצמי( ביחס לטרנספורמציה על פונקציות: )Tα f (x) = f (x + α מבחינה זו ,הפונקציות הנ״ל פשוטות. המרחב שלנו כעת הוא הפונקציות המרוכבות האינטגרביליות רימן בקטע ] f [−π, π] → C ,[−π, πעם המכפלה הפנימית: f1 (x) f2 (x)dx ˆπ = ) (f1 , f2 −π על מנת שייתקיים (f, f ) ≥ 0 :ושיוויון אם״ם f ≡ 0כמעט תמיד. המושג של בסיס אורתונורמלי {en }n∈Zהוא בדיוק אותה הגדרה .ונציין כי: X en =x ) (x, en } | {z f (x)e−inx dx √1 2π n∈Z 66 היירופ םרופסנרט 7.קרפ ונקבל כי: 1 en = √ einx 2π בסיס אורתונורמלי. הערה .einx = e−inx 7.2.2 הפתוח ) f : [−π, π] → Cכוקטור במרחב המכפלה פנימית הנ״ל( לפי הבסיס √1 einx 2π = enהוא פתוח פורייהAn einx : כ אשר: f (x) e−inx dx ˆπ −π 1 2π P = f n∈Z = An כל מה שלמדנו על טורי פורייה עד כה תקף גם במקרה הנ״ל. שיוויון פרסבל: 2 |f (x)| dx משפטי ההתכנסות: ˆπ −π 2 = | |An X n∈Z גם הם יעבדו באופן דומה רק ש: Am eimx n X = Snf m=−n קטע כללי אם רוצים לעבוד בקטע ] [a, bשרירותי אזי: n 2πinx o e b−a n∈Z 2πinx b−a An e יהיה בסיס אורתוגונלי ופיתוח פורייה בקטע ] [a, bיהיה: X n∈Z כאשר: dx 7.3 2πinx b−a f (x) e− ˆ 1 b−a = An פיתוח הטרנספורם נרצה לחשוב על פונקציה f : R → Cונסתכל על צמצום ] f |[−N,Nונפתח אותה לטור פורייה. כאשר: X 2πinx ” = ”f An e 2N n∈Z ו: dx 2πinx 2N f (x) e− ˆN −N 1 2N = An 67 היירופ םרופסנרט 7.קרפ נרצה לבחון את המקרה של ∞ → .N בהנחות המתאימות נקבל כי: ˆN 1 X 2πin = )f (0 f (x) e− 2N dx 2N n∈Z−N נתייחס לזה כסכום רימן: f (x) e−2πixt dx ∞ˆ = )fˆ (t ∞− ונקבל: 1 X ˆ n = )f (0 f 2N N n∈Z ה) fˆ (tהנ״ל היא למעשה הטרנספורם פורייה. 7.4 מוגדרות היטב תהי f : R → Cעם תומך קומפקטי )כלומר קיים R > 0כך ש ) f (xאם (|x| > Rואינטגרבילית רימן בכל קטע ]) [a, bמספיק לבדוק עבור ].([−R, R בפרט f ,חסומה ורציפה כמעט תמיד. נגדיר: f (t) e−ixt dt ˆR = dt −ixt f (t) e ∞ˆ = )fˆ (x ∞− −R כאשר .R ≫ 1 הערה 7.4.1למעשה זה אינטגרל קומפלקסי ,והוא שווה ל: f (t) sin (xt) dt ˆ f (t) cos (xt) dt + ˆ נבחין כי הדבר מאוד דומה לטורי פורייה ,רק שכאן אנו לא מניחים ש xשלם אלא x ∈ Rכלשהו. למה 7.4.2 ˆ fמוגדרת היטב fˆ ,רציפה במ״ש על Rוחסומה. הוכחה :האינטגרל מוגדר היטב ו: ∞ ∞ˆ ∞ˆ ˆ −ixt ˆ −ixt f )(x = f )(t e dt ≤ |f |)(t e dt = ∞ < |f (t)| dt ∞− ∞− ∞− נראה רציפות במידה שווה: ∞ ∞ˆ ∞ˆ ˆ ˆ −i(x+h)t −ixt −iht −ixt ˆ f (t) e dt − f (t) e = dt e ≤ − 1 dt f (t) e = )f (x + h) − f (x 1 ✯ ✟ |f (t)| e−ixt ✟✟ e−iht − 1 dt ✟ ˆR −R ∞− ∞− ∞− 68 היירופ םרופסנרט 7.קרפ כעת ,נבחין כי לכל ε > 0קיים δ > 0כך ש: כאשר |f (t)| dt ∞´ iy e − 1 < ε M ∞− = Mעבור ) |y| < Rδכי (R → C) y 7→ eiyהיא פונקציה רציפה )בפרט ב (y = 0ולכן ,אם :|h| < δ ˆR ε ˆ ˆ |f (t)| dt = ε ≤ )f (x + h) − f (x M −R כלומר fˆ :רציפה במ״ש. 7.5 שחזור fמˆf המטרה הניצבת בפנינו היא שחזור fמתוך ˆ .fאנו תמיד נניח את אותם תנאים כמו בתחילת החלק הקודם ש fעם תומך קומפקטי ואינטגרבילית רימן תזכורת 7.5.1למת רימן־לבג קובעת כי :עבור fכנ״ל fˆ (x) → 0כאשר ∞.x → ± דוגמה 7.5.2עבור ] f = 1[−1,1נקבל: 1 sin x e−ix − e−ix e−ixt =2 = −ix −1 −ix x = e−ixt dt ˆ1 = ˆf −1 דוגמה 7.5.3נקח פונקציה רציפה נוספת: 1 − |x| |x| ≤ 1 0 |x| > 1 ( =f נקבל כי: (1 + t) e−ixt dt ˆ0 dt + −1 −ixt (1 − t) e ˆ1 0 = dt −ixt (1 − |t|) e ˆ1 = )fˆ (x −1 מאינטגרציה בחלקים נקבל: 1 1 ˆ1 −ixt (1 − t) e−ixt 1 e 1 e−ixt 1 − e−ix = dt = + dt = + + −ix −ix ix −x2 0 ix x2 0 0 הגורם השני ,ניתן לחשב באותו אופן ,אבל קל לראות כי הוא הצמוד של הגורם הראשון ולכן: 1 1 − eix + ix x2 (1 + t) e−ixt dt = − ˆ0 −1 ולכן: 2 sin x2 x 2 2 2 − e−ix − eix )2 − 2 cos (x = )fˆ (x = = 2 x x2 −ixt (1 − t) e ˆ1 0 69 היירופ םרופסנרט 7.קרפ משפט 7.5.4 עבור fכנ״ל ניתן לקבל את ) f (tבתור: ˆR ˆ ||x f (x) eixt dx 1− R 1 f (t) = lim k→∞ 2π −R לכל נקודה רציפות tשל .f תזכורת 7.5.5עבור טורי פוריה: f (t) e−int dt ˆ2π 1 = cn 2π 0 והגדרנו את הטור: cm eimt n X = Snf m=−n וכמו כן ,הגדרנו את סכומי סזארו: n+1 n |X n + 1 − |j 1 X f = )Sj (t cj eijt n + 1 j=0 n + 1 | j=−n−1 {z } = )σnf (t ||j 1− n+1 כלומר ,ניתן לראות כי זה אנאלוגי לטענה במשפט .לכן המשפט הוא אנאלוג רציף לעובדה ש: )σnf → f (t עבור fעם תנאים נוספים מתקיים: fˆ (x) eixt dx ˆb a 1 = dx lim ∞2π a → − ∞→b ixt fˆ (x) e ∞ˆ ∞− 1 = )f (t 2π )אינטגרל לא־אמיתי סטנדרטי ,הכוונה ש a, bבאופן בלתי תלוי שואפים ל ∞ ו ∞ −ולכן זה שקול(. )זה אנאלוג רציף של.(Snf (t) → f (t) : אבל זה לא נכון באופן כללי. הוכחה :נסמן: fˆ (x) eixt dx ˆa = )g (a −a אנו רוצים ש ) g (a) → f (tכאשר ∞ → (a לכן ,נקבל כי: f (a) da ˆR 0 1 = dx R ixt fˆ (x) e ||x 1− R ˆR −R 70 קרפ7. היירופ םרופסנרט :מדוע? מכיון ש ˆR g (a) da = ˆR ˆa fˆ (x) eixt dxda 0 −a 0 : נקבל,אבל אם נבחן את זה גיאומטרית ˆ fˆ (x) eixt dxda = ˆR ˆR fˆ (x) eixt dadx = −R |x| |x|≤a≤R ˆR (R − |x|) fˆ (x) eixt dx = R −R ˆR |x| ˆ 1− f (x) eixt dx R −R 7.5.6 מסקנה : מתקייםt רציפה בf בהנחה ש, אזlim ´R R→∞ −R fˆ (x) eixt dx = lim g (R) אם R→∞ = f (t) : ולכן. קייםA = lim g (a) לפי ההנחה:הוכחה 1 f (t) = lim R→∞ R ˆR g (a) da = A 0 .מהמשפט הקודם :למה הגרירה הקודמת נכונה? מכיוון ש ˆR ˆR ˆR 1 1 1 R g (a) da − A = R (g (a) − A) da ≤ R |g (a) − A| da 0 0 0 : ולכןa > B | לכלg (a) − A| < ε : מספיק גרודB עבור.ε > 0 יהי 1 = R | ˆB 0 ˆR 1 |g (a) − A| da + |g (a) − A| da < 2ε R B {z } {z } | →0 <ε . מספיק גדולR עבור : נראה כי,בחזרה למשפט 1 2π ˆR −R |x| ixt ˆ dx −→ f (t) 1− f (x) e R→∞ R :הוכחה fˆ(x) z ˆR ˆA −R −A }| { |x| dx f (t) e−ixy dy eixt 1 − R 71 היירופ םרופסנרט 7.קרפ כאשר לכל |a| > Aמתקיים ) f (a) = 0הנחנו תומך קומפקטי( .לכן זה שקול ל: )fˆ(x ˆR ˆA 1 ||x ||x )ix(t−y = dx dydx 1− 1− f (t) e R 2π R ixt { dy e −ixy |} f (t) e z ∞ˆ ˆR ∞−R − −R −A נבצע החלפת משתנים y → t − y :ונקבל: ∞ˆ ˆR ||x dydx f (t − y) eixy 1 − R 1 = 2π ∞−R − נחליף סדר אינטגרציה ונקבל: ∞ˆ ||x = dxdy f (t − y) KR (y) dy 1− R ixy ∞− f (t − y) e כאשר: dx ||x 1− R ixy e ˆR 1 = )KR (y 2π −R נבחין כי KRהוא למעשה הפורייה טרנספורם של: ||a R |a| ≤ R אחרת 1− 0 ( = )gr (a ומתקיים: )gˆR (y) = gˆR (−y עבור R = 1כבר חשבנו את KRוקיבלנו כי: 2 sin y2 y 2 1 = )K1 (y 2π ע״י החלפת משתנים x 7→ xR :נקבל כי: !2 sin Ry 2 Ry 2 R = )KR (y) = RK1 (Ry 2π תזכורת 7.5.7נבחין כי זה מזכיר לנו את גרעין פייר: !2 sin n+1 2 θ sin 2θ ˆ∞ ˆR −∞ −R 1 = 2π 1 2π 72 היירופ םרופסנרט 7.קרפ הביטוי שקיבלנו )f (t − y) KR (y) dy הטענה שלנו למעשה היא: ∞´ ( הוא למעשה קונבולוציה ).f ∗ KR (t ∞− )lim f ∗ KR (t) = f (t ∞→R נבחין כי: R 2π = )KR (0 תכונות נוספות ל :KR )KR (y) = KR (−y KR (y) ≥ 0 לכל δ > 0מתקיים 2 1 δ/2 1 1 R 2π ≤ |) .|KR (yלכל .|y| ≥ δבפרט: KR −→ 0 ∞→R במידה שווה על ]∞ .[δ,וכמו כן: KR (y) dy = 1 ∞ˆ ∞− מדוע? נבחין כי מספיק להסתכל על R = 1בגלל הפרדת משתנים .נקבל כי: dy 2 sin y2 y 2 ∞ˆ ∞− 1 = K1 (y) dy 2π ∞ˆ ∞− נזכור כי: R ˆR )✿ sin(2t ˆ2R ✘✘ sin t sin2 t sin2 R 2 cos t sin t ✘✘ ✘ + − dt = dt − t 0 t t R 0 0 ולכן: sin t π = dt t 2 ∞ˆ sin t = dt t ˆR = }|{z אינטגרציה בחלקים sin2 t dt = lim ∞→R t2 0 ∞ˆ 0 0 0 sin2 t dt t2 ˆR כלומר נקבל כי: sin y dy = 1 y ∞ˆ 0 2 = dy π 2 sin y y ∞ˆ 0 2 = dy π 2 sin y2 y 2 ∞ˆ 1 = dy π 0 כעת ,בחזרה להוכחה ,אנו רוצים: )f (t − y) KR (y) dy −→ f (t ∞→R ∞ˆ ∞− 2 sin y2 y 2 ∞ˆ ∞− 1 2π 73 היירופ םרופסנרט 7.קרפ יהי .ε > 0מהרציפות ב tקיים δ > 0כך ש: ∀ |y| < δ |f (t − y) − f (t)| < ε ולכן: (f (t − y) − f (t)) KR (y) dy ˆ = )f (t − y) KR (y) dy − f (t ˆ המעבר חוקי בגלל ש: KR (y) dy = 1 ∞ˆ ∞− כעת נבחין כי: δ ˆ ˆδ ˆδ (f (t − y) − f (t)) KR (y) dy ≤ |f (t − y) − f (t)| KR (y) dy ≤ ε KR (y) dy < ε −δ −δ נרצה לבחון את: −δ ∞ ˆ (f (t − y) − f (t)) KR (y) dy δ לשם כך ,נבחין כי: KR (y) dy −→ 0 ∞→R ˆ |y|≥δ לכל . δ > 0הסיבה לכך היא: 4 dy ≤ 2 y Rδπ ∞ˆ 1 δ 2 2 = 2 dy πR Ry ∞ˆ R ≤ KR (y) dy π δ ˆ y≥δ לכן נקבל כי: ∞ ˆ ∞ˆ (f (t − y) − f (t)) KR (y) dy ≤ 2 sup f KR (y) dy −→ 0 ∞→R δ δ ובאותו אופן עבור −δ ´ גם הוא שואף ל .0 ∞− הערה 7.5.8ההוכחה מראה שאם fרציפה )במ״ש( אז: |x| ixt ˆ )e dx → f (t f (x) 1 − R ˆR 1 lim R→∞ 2π −R במידה שווה עבור ) .t ∈ Rמכיוון שאנו מניחים תומך קומפקטי ,אז מספיק fרציפה ,כיוון שהיא בפרט תהא רציפה במ״ש(. 74 היירופ םרופסנרט 7.קרפ הערה 7.5.9באותו אופן אם: )f (t + h) + f (t − h 2 A = lim h→0 קיים אז הוכחה דומה מראה ש: |x| ixt fˆ (x) 1 − e −→ A ∞→R R ˆ 1 2π כי: )f (t − y) + f (t + y KR (y) dy 2 ˆ = f (t + y) KR (y) dy ˆ = f (t − y) KR (y) dy ˆ ״כלל״ חשוב הוא :ככל ש fיותר חלקה ,כך ˆ fדועכת יותר מהר ולהפך. טענה 7.5.10 אם fגזירה ברציפות אז: )fˆ′ (x) = ixfˆ (x הוכחה: )f (t) e−ixt dt = ixfˆ (x ∞ˆ 0 ix ∞− ✿ ✘✘ ✘✘∞ + dt = f (t) e−ixt ∞− }|{z ✘✘✘ אינטגרציה בחלקים מסקנה 7.5.11 אם fגזירה ברציפות ,אז קיים Cכך ש: C |1 + |x ≤ )fˆ (x ∀x ∈ R ולמעשה: (1 + |x|) fˆ (x) −→ 0 ∞x→± מכיוון ש: ˆ ˆ′ xf (x) = f (x) −→ 0 ∞x→± מרימן לבג. הערה 7.5.12זה לא מתקיים עבור ] .f = 1[−1,1כי היא לא רציפה אפילו. −ixt ′ f (t) e ∞ˆ ∞− = )fˆ′ (x 75 היירופ םרופסנרט 7.קרפ הערה 7.5.13ניתן להרחיב את זה ולדבר עם פונקציה גזירה ברציפות למקוטעין ונקבל אותו הדבר. לדוגמה פונקציית השן שראינו: ( 1 − |x| |x| ≤ 1 =f 0 |x| > 1 מתקיים: 2 sin x2 x 2 = ˆf ניתן להמשיך זאת באינדוקציה ,אם fגזירה ברציפות nפעמים אז: )ˆ (x) = (ix)n fˆ (x )f (n מסקנה 7.5.14 n אם fגזירה ברציפות nפעמים אז .(1 + |x|) fˆ (x) −→ 0 ∞x→± בפרט אם fחלקה ,אז לכל nקיים Cכך ש: C | 1 + |xn < )∀x ∈ R fˆ (x מסקנה 7.5.15 אם fגזירה ברציפות פעמיים אז מתקיים השיוויון: ˆ0 a + lim ∞a→− ˆb fˆ (x) eixt dx = lim ∞→b ˆb a 0 lim ∞a → − ∞→b = fˆ (x) eixt dx ∞ˆ = )f (t ∞− הוכחה :לפי הנחה: C 1 + |x|2 ˆ ≤ )f (x ולכן: fˆ (x) eixt dx ∞ˆ ∞− קיים )מכיוון שהוא קיים בערך מוחלט( .מצד שני ראינו שאם: fˆ (x) eixt dt ˆR lim ∞→R −R קיים )תכונה חלשה יותר מהקודמת ,ולכן מתקיימת( אז ראינו כי הוא שווה ל ) f (tאם fרציפה ב .t 76 היירופ םרופסנרט 7.קרפ הערה 7.5.16אם f : R → Cפונקציה חסומה ורציפה כמעת בכל נקודה ו: |f (t)| dt ∞ˆ ∞− קיים ,אז ניתן להגדיר את: f (t) e−ixt dt ∞ˆ = )fˆ (x ∞− זה יהיה הטרנספורם פורייה של ) fלפי הגדרה(. כל המשפטים והטענות שהראינו תקפים ל fכנ״ל. 7.6 השלמות לטרנספורם Fourier נניח ש f : R → Cאינטגרבילית רימן על כל קטע סופי|f (t)| dt , ∞´ f (t) e−ixt dt ∞ˆ קיים )כלומר|f (t)| dt < ∞ : ∞− ´R .(supאזי: −R = )fˆ (x ∞− מוגדר לכל .x למה 7.6.1 ˆ fפונקציה רציפה במ״ש ,חסומה fˆ (x) → 0 ,כש ∞.x → ± הוכחה :ציינו כי זה כבר מוגדר הייטב כי בערך מוחלט הוא מתכנס .כמו כן: ∞ˆ ˆ |f (t)| dt ≤ )f (x ∞− רציפות במ״ש: ˆ + |t|≥R ˆR −R = − 1 dt −iht e −ixt f (t) e ∞ˆ = dt ∞− −ixt −e −i(x+h)t f (t) e ˆ = )fˆ (x + h) − fˆ (x ולכן נקבל כי: ˆ || −R |t|≥R } | {z |f (t)|dt<ε R≫1 ˆR ˆ ||+ ≤ )f (x + h) − fˆ (x ´ |t|>R ≤2 החלק השני תלוי ב εאבל לא ב xואילו האינטגרל הראשון: |f (t)| dt < ε ∞ˆ |f (t)| |ht| dt ≤ hR ∞− ˆR |f (t)| e−iht − 1 dt ≤ 3 −R במידה ו hמספיק קטן באופן בלתי תלוי ב ) .xכאשר מתקיים|ht| ≤ 1 : 1 ⇒R ≤ (h ˆR −R 77 היירופ םרופסנרט 7.קרפ הערה 7.6.2אנו משתמשים כאן בכך ש: ix |e − 1 ≤ 3 |x כאשר .|x| ≤ 1 לבסוף ,הלמה של רימן־לבג fˆ (x) → 0 :כאשר ∞ x → ±נבחין כי: f (t) e−ixt dt ˆ dt + −ixt f (t) e ˆR = )fˆ (x −R |t|≥R נקבל כי: ˆ ˆR ˆ −ixt |f (t)| dt f )(x ≤ f )(t e dt + −R |t|≥R | {z } <ε עבור R ≫ 1תלוי ב εאבל לא ב .xואילו הגורם הראשון: R ˆ f (t) e−ixt dt ≤ f 1[−R,R] (x) → 0 −R כאשר ∞ .x → ±כלומר: R ˆ f (t) e−ixt dt < ε −R עבור | |xמספיק גדול. משפט 7.6.3 אם fכנ״ל אז: )fˆ (x) eixt dx −→ f (t ∞→R ||x R 1− ˆR −R בכל נקודת רציפות tשל .f הוכחה :שלב ראשון: f (t − x) KR (x) dx ∞ˆ = LHS ∞− כאשר: !2 sin Rx 2 Rx 2 R 2π = )KR (x 1 2π 78 היירופ םרופסנרט 7.קרפ זה מפוביני )צריך להצדיק אותו עבור אינטגרלים לא אמיתיים ,אבל לא נעשה זאת .זה יותר קל עם אינטגרל לבג(. ∞ˆ ∞ˆ ∞ˆ ∞ˆ = F (x, y) dx dy F (x, y) dy dx ∞− ∞− ∞− ∞− עבור: ||x 1 max 1 − ), 0 eix(t−y) f (y 2π R = )F (x, y הערה 7.6.4שיוויון פוביני הנ״ל נובע מכך ש: ˆ ˆ |f (x, y)| dx dy מתכנס. השלב השני הוא להסתכל על ההפרש בין אגף שמאל ל ).f (t ˆ (f (t − x) − f (t)) KR (x) dx (f (t − x) − f (t)) KR (x) dx + ˆδ = (f (t − x) − f (t)) KR (x) dx −δ |x|>δ ולכן: |f (x)| dx ∞ˆ ∞− · KR (x) dx · sup |f (x + x) − f (t)| + 2 sup KR |x|≤δ |x|≥δ } ˆδ {z ≤1 ≤ |)|LHS − f (t −δ | הערה 7.6.5 ˆ KR (x) dx |)|f (t |x|>δ KR (x) dx ˆ |)|f (x)| dx + |f (t |x|≥δ ∞ˆ )≤ sup |f (t + x) − f (t)| + sup KR (x |x|≥δ ∞− |x|≤δ נבחר δ > 0כך ש sup |f (t + x) − f (t)| < ε |x|≤δ )קיים כי fרציפה ב .(t כמו כן ,נבחר R0כך ש: KR (x) dx, sup KR (x) < ε |x|≥δ ˆ ∀R > R0 |x|≥δ ונקבל כי: |)|f (t)| dt + ε |f (t ∞ˆ |LHS − f (t)| < ε + ε ∞− ∞ˆ ∞− = )LHS − f (t 79 היירופ םרופסנרט 7.קרפ הערה 7.6.6ההוכחה מראה בנוסף כי אם fרציפה במ״ש על Rוחסומה אז: ˆR ˆ ||x )f (x) eixt dx → f (t 1− R 1 2π −R במ״ש על .R מכיוון ש δ > 0תלוי רק ב ) εולא ב (tכי fרציפה במ״ש R0 .תלוי רק ב ) δולכן רק ב .(εולכן נקבל כי: |LHS − f (t)| < M ε כאשר: |M = 2 + sup |f x x∈R עברו R > R0כלומר ,ההתכנסות במ״ש. דוגמה 7.6.7אם נתבונן בפונקציית המשולשים שמגיעה עד n2עם בסיס בין nו .n + 2−nברור כי fרציפה ולכן אינטגרבילית על כל קטע סופי .וכמו כן ,ברור כי: ˆ ∞ < |f (t)| dt אבל fלא חסומה. 7.7 נוסחת ההיפוך של Fourier משפט 7.7.1 ∞ ´ ˆ אם fכנ״ל )∞ < |f (t)| dt ( וf (x) dx : ∞− ∞´ קיים אז: ∞− ˆ )fˆ (t) = 2πf (−t בכל נקודת רציפות tשל .f הוכחה: ˆR ˆR ˆa 1 1 1 ||x = eixt dx fˆ (x) eixt dx da fˆ (x) 1 − 2π R R 2π −a 0 −R זה הממוצעים שכבר ראינו )ה.(σ אם הגבול קיים אז הוא שווה: ||x ˆ eixt dt f (x) 1 − R ˆ 1 = fˆ (x) eixt dx 2π ˆa −a 1 lim a→∞ 2π אבל זה שווה ל ) f (tמהמשפט הקודם .ולכן: fˆ (x) eixt dx ∞ˆ ∞− 1 = fˆ (x) eixt dx 2π ˆa −a 1 lim a→∞ 2π 80 קרפ7. היירופ םרופסנרט ☛ . ולכן קיבלנו את המבוקש.מכיוון שהנחנו כי הוא מתכנס ✡ . חסומהf , בפרט. lim f (t) = 0 :אז t→±∞ ´ |f (t)| dt < ∞ : רציפה במ״ש וf אם:תרגיל 7.7.2 משפט 1 f (t) = lim 2π R→∞ ˆR : אזfˆ (x) ≤ A x : מתקייםx ∈ R כך שלכלA אם קיים fˆ (x) eixt dx −R .f שלt בכל נקודת רציפות .ε > 0 יהי:הוכחה |x| ∆R (x) = max 0, 1 − R :אנו יודעים כי f (t) = 1 lim 2π R→∞ ˆ∞ fˆ (x) eixt ∆R (x) dx −∞ :R′ > R נגדיר עבור ∆R,R′ (x) = 1 (R′ ∆R′ (x) − R∆R (x)) R′ − R .למעשה אנו מקבלים טרפז . יקבע בהמשך בהתאם לאפסילוןδ > 0 כאשרR′ = R (1 + δ) נקח :נבחין 1 2π ˆ∞ −∞ R′ 1 fˆ (x) eixt ∆R,R′ (x) dx = ′ 2π R − R ˆ R 1 fˆ (x) eixt ∆R′ (x) dx − 2π R′ − R ˆ fˆ (x) eixt ∆R (x) dx : נקבלR′ אבל מהבחירה של R 1 = , ′ R −R δ R′ 1+δ = ′ R −R δ :ולכן = 1+ 1 δ 1 2π | ˆ 1 1 fˆ (x) eixt ∆R′ (x) dx − δ 2π | {z } ˆ −→ f (t) R→∞ fˆ (x) eixt ∆R (x) dx −→ f (t) R→∞ {z } −→ f (t) R→∞ :מצד שני ∞ ˆ ˆ−R ˆR′ ˆR ˆ (x) eixt ∆R,R′ (x) dx − ˆ (x) eixt ≤ ˆ (x) eixt (∆R,R′ (x) − 1) dx+ fˆ (x) eixt (∆R,R′ (x) − 1) dx ≤ f f f ′ −∞ −R −R ˆR′ R ˆ f (x) dx + R ˆ−R −R′ ˆ f (x) dx ≤ 2A ˆR′ R dx = 2A ln (1 + δ) < 2Aδ = ε x ✟ ✠ 81 קרפ7. היירופ םרופסנרט .δ = ε 2A :כאשר בחרנו :לכן ˆ ˆ 1 ˆ ixt ixt ˆ <ε ′ f (x) e dx (x) dx − f (x) e ∆ R,R 2π : מתקייםR > R0 כך שלכלR0 נבחר ˆ 1 ixt ˆ 2π f (x) e ∆R,R′ (x) dx − f (t) < ε ∀R > R0 :ואז ˆR 1 ixt ˆ f (t) − f (x) e dx < 2ε 2π −R 7.7.3 טענה .fˆ (x) ≤ A x :קיים אז ´∞ −∞ |f ′ (t)| dt : ו. גזירה ברציפות למקוטעיןf אם : זה נובע מ:הוכחה fˆ′ (x) = ixfˆ (x) . חסוםfˆ′ ומהעבודה ש ˆbn ′ f (t) e −ixt dt = f an bn (t) e−ixt an + ix ˆbn f (t) e−ixt dt an : כך שbn → ∞ : וan → −∞ נקח |f (bn )| , |f (an )| → 0 .( כתרגיל,קיים fˆ′ (x) = ˆ∞ ′ f (t) e −ixt dt = lim −∞ ˆbn ´ |f (t)| dt :)קיימות כי :ולכן f ′ (t) e−ixt dt = ixfˆ (x) an :קיימים אז ´∞ (j) f (t) dt j = 0, . . . , n : פעמים ו עבורn גזירהf אם7.7.4 הערה −∞ A ˆ f (x) ≤ n x . f (t) = 1 2π ´∞ −∞ fˆ (x) eixt dx ⇐ ´ fˆ (x) dx < ∞ זה יבטיח שn = 2 עבור 82 היירופ םרופסנרט 7.קרפ פונקציות עם השתנות חסומה על :R ∞ < |) |f (ti+1 ) − f (ti n−1 X sup n t0 < . . . < t n i=0 =f : ∞ _ ∞− הערה 7.7.5אם f : R → Rמונוטונית ו −∞ < lim f (t) , lim f (t) < ∞ :אז ל fיש השתנות חסומה: ∞t→− ∞→t )f = lim f (t) − lim f (t ∞→t ∞t→− ∞ _ ∞− f : R → Rבעלת השתנות חסומה ⇒⇐ f = g1 − g2כאשר giמונוטוניות עולות ו: )lim gi (t ∞t→− lim gi (t) , ∞→t קיימים. ! f t _ ∞− f− f− t _ = )f (t ∞− אם ל fיש השתנות חסומה אז lim f , lim f :קיימים. ∞→t אם fגזירה ברציפות על Rו|f ′ (t)| dt : ∞t→− ∞´ קיים אז: ∞− |f ′ (t)| dt ∞ˆ =f ∞− ∞ _ ∞− משפט 7.7.6 אם ל fיש השתנות חסומה ו|f (t)| dt : ∞´ ∞− קיים אז lim f (t) = 0 :ו: ∞t→± הוכחה :החלק הראשון ברור. נרצה להראות את החלק השני .ראינו כי: A ||x ≤ ).fˆ (x b ˆ b _ ≤ f g ′ − f g|b f · sup g a ][a,b a a בפרט ,עבור :g (t) = e−ixt ˆR R ∞ _ _ ˆ −ixt −ixt R −ix ≤ f ⇒ ||x f )(x f )(t e dt − f e ≤ f −R −R ∞− −R כלומרf : ∞ W ∞− = Aוקיבלנו את המבוקש) .המעבר ,כי .( lim f = 0 ∞t→± 83 היירופ םרופסנרט 7.קרפ 7.8 שיוויון Parseval עבור תורי פורייה ראינו כי: 2 | |cn X n∈Z 2 = |f (x)| dx ˆ2π 1 2π 0 כאשר: f (x) einx dx ˆ2π 1 2π = cn 0 נרצה לשאול מה הוא האנאלוג הרציף שלו? משפט 7.8.1 ´ 2 אם fאינטגרבילית רימן בכל קטע סופי ∞ < |f (t)| dt . |f (t)| dt אז: 2 |f (t)| dt {z } kf k22 ∞ˆ ∞´ ∞− ˆ 2 f (x) dx = 2π ∞− | קיים )זה תמיד נכון אם fחסומה(. } {z 2 kfˆk2 ∞ˆ ∞− | הערה 7.8.2העתקה ˆ f → √12π fהיא איזומטריה של מרחבי מכפלה פנימית ביחס ל כלומר. fˆ, gˆ = 2π (f, g) : כמו כן ,זה קונסיסטנטי עם: ∞´ = ).(f, g ∞− ˆ )fˆ (t) = 2πf (−t על מנת להוכיח את המשפט אנו צריכים עוד כמה כלים. 7.8.1 קונוולוציה הגדרה 7.8.3קונוולוציה :בהינתן f, g : R → Cנגדיר: f (t − x) g (x) dx בהנחה ש|f (t − x)| |g (x)| dx : ´ ∞ˆ ∞− = )f ∗ g (t קיים. 7.8.1.1תכונות .1 f ∗g =g∗f )ע״י חלוף משתנים באנטגרל.(x 7→ t − x , .2אם fחסומה ו |g (t)| dt ∞´ ∞− קיים אז f ∗ gמוגדרת ורציפה על ) .Rאם יישאר זמן נוכיח(. 84 היירופ םרופסנרט 7.קרפ ∞´ ∞´ ´ ´ .3אם בנוסף gחסומה ו|f (t)| dt : קיים אז|f ∗ g (t)| dt : קיים וקטן מ. |f | |g| : ∞− הוכחה: ∞− ∞ˆ ∞ˆ ∞ˆ ∞ˆ |f (t − x)| |g (x)| dx dt ≤ f (t − x) g (x) dx dt ∞− נראה ש: ∞−∞ − ∞− ∞ˆ ∞ˆ ∞ < |f (t − x)| |g (x)| dt dx ∞− ∞− )זה שקול לסופיות של האינטגרל הקודם ,מפוביני במקרה אינסופי שכאמור לא הוכחנו(. אבל זה שקול ל: | |f ˆ ||g ˆ = |f (t − x)| dtdx ∞ˆ |)|g (x ∞− ∞ˆ ∞− טענה 7.8.4 בהנחות הנ״ל: [f )∗ g (x) = fˆ (x) gˆ (x הוכחה: f (t − y) g (y) dy e−ixt dt ∞ˆ ∞− ˆ [f = )∗ g (x נבחין e−ix(t−y) e−ixy = e−ixt :ולכן: f (t) e−ixt dt dy } 2 .4אם |g (t)| dt 7.8.2 ∞´ ∞− {z ∞ˆ 2 } ∞− | )fˆ(x |f (t)| dt, −ixy ∞´ ∞− g (y) e | {z g )ˆ(x ∞ˆ = dydt )−ix(t−y ∞− f (t − y) e −ixy g (y) e ∞ˆ ∞ˆ = ∞−∞ − קיימים אז f ∗ gמוגדרת רציפה )קושי שוורץ מוכיח הגדרה(. הוכחת שיוויון פרסבל נסתכל על: ∨F = f ∗ f כאשר F .f ∨ (t) = f (−t) :מוגדרת ורציפה מהתכונה של הקונוולוציה. ˆ ˆ ˆ ˆ 2 2 F (0) = f (−x) f ∨ (x) dx = f (−x) f (−x)dx = |f (−x)| dx = |f (x)| dx 85 היירופ םרופסנרט 7.קרפ מצד שני: ∨ˆFˆ = fˆ · f נחשב: )f (t) e−ixt dt = fˆ (x ˆ = f (−t) eixt dt ˆ = f (−t) eixt dt ˆ = f (−t)e−ixt dt ˆ = f ∨ (t) e−ixt dt ˆ = )fˆ∨ (x כלומר: 2 )Fˆ (x) = fˆ (x כלומר ,במונחי Fנקבל שיש להוכיח כי: Fˆ (x) dx ∞ˆ ∞− השיוויון הזה נכון כי Fרציפה )ב־Fˆ (x) dx (0 מצד שני: ´R 1 = )F (0 2π limקיים )אולי אינסופי ,אבל קיים .מכיוון שזו פונקציה מונוטונית עולה ב .(R R→∞ −R ||x )dx ⇒ F (0) = lim g (R Fˆ (x) 1 − ∞→R R ˆR = g (a) da ˆR 1 1 lim = )F (0 2π R→∞ R 0 −R הערה 7.8.5באופן כללי אם g : R → Cחסומה על כל קטע סופי: ∃ lim g (x) = A ∞→x אז: g (a) da ˆR 1 A = lim R→∞ R 0 למה 7.8.6 Fרציפה. הוכחה: f (t − x) g (x) dx ˆ →t ˆ ˆ ∞ˆ 2 (f (t − x) − f (t′ − x)) g (x) dx ≤ |g (x)|2 dx |f (t − x) − f (t′ − x)| dx ∞− 2 כלומר ,צריך להראות כי |f (t − x) − f (t′ − x)| dx ∞´ ∞− קטן .אבל זה קל עם סכומי רימן. פרק 8 אופרטורים לינארים במרחבי מכפלה פנימית 8.1אופרטור לינארי הגדרה 8.1.1אופרטור לינארי :יהי Xמרחב וקטורי .פונקצייה A : X → Xהמקיימת: )A (αx + βy) = αA (x) + βA (y לכל x, y ∈ Xו ) α, β ∈ Rאנו מניחים מרחב וקטורי מעל הממשיים(. נקראת אופרטור לינארי על ) Xנהוג לקצר :״אופרטור על X״(. במקרה כזה נסמן לרוב Axבמקום ).A (x הגדרה 8.1.2אופרטור חסום :יהי Xמרחב נורמי .אופרטור לינארי Aעל Xנקרא חסום אם: kAxk ∞< kxk sup kAxk = sup kxk6=0 kxk=1 במקרה כזה ,נסמן.kAk = sup kAxk : kxk=1 הערה 8.1.3ניתן להראות ש k·kהנ״ל זו נורמה על מרחב האופרטורים הנ״ל )עם חיבור וכפל בסקלר טבעיים(. טענה 8.1.4 אופרטור לינארי חסום על מרחב וקטורי Xהוא בפרט פונקציה רציפה. הוכחה :ל :x 6= y kx − yk = kAk kx − yk ! kAzk kzk6=0 kzk sup kA (x − y)k ≤ kx − yk kx − yk = kAx − Ayk = kA (x − y)k כלומר ,האופרטור הוא פונקציה ליפשיצית ,ובפרט רציפה. דוגמה 8.1.5על ) H (a, bהגדיר את ״האופרטור של כפל בפרמטר״ ע״י.(Af ) (x) = xf (x) : קל לראות כי Aלינארי ,וכמו כן שהוא חסום מכיוון ש: v v u b u b ˆu ˆu u u }|sup kAf k = sup = t x2 f 2 dx ≤ max {|a| , |b|} t f 2 (x) dx = max {|a| , |b a a kf k=1 kf k=1 כלומר קיים חסם מלעל .כלומר Aחסום) .וניתן להראות ש }| kAk = max {|a| , |bממש ,לדוגמה ,ניתן לבנות פונקציה שכולה נמצאת בסביבת bבצורה מרוכזת .הפונקציות הבונות של הדלתא של דיראק(. 86 87 תימינפ הלפכמ יבחרמב םיראניל םירוטרפוא 8.קרפ דוגמה 8.1.6על מרחב הפולינומים על ] [a, bעם הנורמה המורשת מ ) .H (a, bנגדיר את ״אופרטור הגזירה״ ע״י: )(Df ) (x) = f ′ (x במקרה הזה D ,אופרטור לינארי ,אבל איננו חסום) .ניתן לקחת פונקציה שמתנודדת הרבה פעמים באופן ״דחוס״ כך שהנגזרת הולכת ועולה .למעשה משחזרים את הפעולה של ) sin (nxע״י פולינומים דומים. הגדרה 8.1.7אופרטור לינארי חסום על מרחב מכפלה פנימית ייקרא צמוד לעצמות אם לכל x, y ∈ Xמתקיים: hAx, yi = hx, Ayi )לפעמים גם משתמשי בשם הרמיטי(. דוגמה 8.1.8האופרטור של כפל בפרמטר על ) H (a, bהוא צמוד לעצמו. הערה 8.1.9לאופרטור הכפל בפרמטר על ) H (a, bאין וקטורים עצמיים. מכיוון ש: (x − λ)2 f 2 (x) dx ˆb a ! 2 = 0 = k(A − λ) f k = .kf k לכל fשעבורה 6 0 לשם כך ,נדרש שהאינטגרנד יתאפס כמעט בכל מקום .כלומר (x − λ)2מתאפס כמעט בכל מקום ,וזו כמובן סתירה. 8.2 הצגה מטריציאלית טענה 8.2.1 ∞ {δn }n=1 אם Aאופרטור חסום על מרחב מכפלה פנימית )ספרבילי( Xבעל בסיס אורתונורמלי ∞ ∞ ∞ X X X Aδj , δn hx, δj i δn = Ax = hx, δn i Aδn j=1 n=1 אזי לכל x ∈ Xמתקיים: n=1 הגדרה 8.2.2אלמנטי מטריצה :אם Aאופרטור חסום על מרחב מכפלה פנימית ,Xמספרים מהצורה hAx, yi :עבור .x, y ∈ X נקראים ״אלמנטי מטריצה של A״. ∞ ∞ עבור בסיס אורתונורמלי ,{δn }n=1אוסף המספרים {hAδj , δn i}j,n=1 :נקרא :״אלמנטי המטריצה של Aביחס לבסיס האורתונורמלי ∞ {δn }n=1״. האוסף הזה קובע את Aחד־ערכית )רואים מהטענה( :ניתן לזהות כל ווקטור x ∈ Xעם ״וקטור עמודה״: hx, δ1 i hx, δ2 i hx, δ3 i .. . וכל אופרטור חסום Aעם המטריצה: ... . . . .. . hAδ2 , δ1 i hAδ2 , δ2 i .. . hAδ1 , δ1 i hAδ1 , δ2 i .. . רואים שווקטור העמודה המתאים ל Axמתאים מכפל המטריצה המתאימה ל Aבווקטור העמודה המתאים ל ) xזה נובע מהטענה(. ∞ המטריצה המתאימה ל Aבאופן הנ״ל נקראת :הצגה מטריציאלית של Aבבסיס אורתונורמלי .{δn }n=1 88 תימינפ הלפכמ יבחרמב םיראניל םירוטרפוא 8.קרפ הגדרה 8.2.3בהינתן פונקציה חסומה חיובית ואינטגרבילית רימן על קטע ] [a, bהמקיימת inf W (x) > 0נסמן ב: ]x∈[a,b ) H ([a, b] , W את מרחב המכפלה הפנימית של אברי ) H (a, bעם המכפלה הפנימית: f (x) g (x) W (x) dx ˆb a = hf, gi )פונקצייה Wכנ״ל נקראת ״פונקציית משקל״(. טענה 8.2.4 אם k·k2מציין את הנורמה ב ) H (a, bו k·kWאת הנורמה ב ) ,H ([a, b] , Wאזי לכל f ∈ H (a, b) :מתקיים: inf W (x) kf k2 ≤ kf kW ≤ sup W (x) kf k2 ]x∈[a,b ]x∈[a,b ובפרט k·k2ו k·kWהן נורמות שקולות. הגדרה 8.2.5בהינתן פונקציית משקל Wכנ״ל .יהיו } {p0 , p1 , p2 , . . .הפולינומים המתקבלים מהפעלת תהליך גרם־שמידא ב ) H ([a, b] , Wעל סדרת הפונקציות . 1, x, x2 , x3אזי {p0 , p1 , p2 , . . .} :נקראים הפולינומים האורתונורמלים ביחס לפונקציית המשקל Wעל הקטע ].[a, b טענה 8.2.6 } {p0 , p1 , p2 , . . .הנ״ל מהווים בסיס אורתונורמלי של ) .H ([a, b] , W הוכחה :הפונקציות 1, x, x2 , . . .הן בלתי תלויות לינארית) .כי פולינום שאיננו זהותית אפס מתאפס לכל היותר במספר סופי של נקודות(. ולכן ברור מהבנייה ש } {p0 , p1 , p2 , . . .מהווים מערכת אורתונורמלית ב ) H ([a, b] , Wש pnפולינום ממעלה .nכמו כן ,תהליך גרם־שמידט מבטיח ש: n n span {pj }j=0 = span xj j=0 לכל nובפרט מתקיים span {pj }nj=0 :הוא בדיוק אוסף כל הפולינומים על ] [a, bולכן ,כפי שכבר יודע ,צפוף ב ) H (a, bולכן גם ב ) ) H ([a, b] , Wכי הנורמות שקולות(. משפט 8.2.7 הפולינומים } {p0 , p1 , p2 , . . .מקיימים את יחס הרקורסיה: )a0 p1 (x) = (x − b0 ) p0 (x ו: )an pn+1 (x) = (x − bn ) pn (x) − an−1 pn−1 (x לכל .n > 0כאשר: xp2n (x) W (x) dx ˆb = bn a xpn (x) pn+1 (x) W (x) dx ˆb a לכל .n ≥ 0 = 0 6= an 89 תימינפ הלפכמ יבחרמב םיראניל םירוטרפוא 8.קרפ הוכחה :יהי AWהאופרטור של כפל בפרמטר על ) .H ([a, b] , W אזי לכל AW pn ,nהוא הפולינום (AW pn ) (x) = xpn (x) :ובפרט זהו פולינום ממעלה .n + 1 תהליך גרם־שמידטט מבטיח שעבור pk ,k > n + 1הוא אורתוגונלי לכל פולינום ממעלה קטנה או שווה ל .n + 1מכאן שעבור k > n + 1מתקיים: hAW pn , pk i = 0 היות ו AWצמוד לעצמו ,נובע גם של ) n > k + 1כלומר ( k < n − 1מתקיים: hAW pn , pk i = hPn , AW Pk i = 0 ∞} {pnשהיא טריאגונלית .דהיינו מהצורה: לכן נובע של AWיש הצג מטריציאלית בבסיס אורתונורמלי n=0 b 0 a0 0 . . . . . . a0 b1 a1 0 . . . 0 a1 b 2 . . . . . . .. .. .. .. . . . . 0 .. .. . . . . . . . . . . . כאשר: = hAW pn , pn i = hAW pn , pn+1 i bn an משמעות ההצגה הנ״ל היא שמתקיימים השיוונים הווקטורי: AW p0 = b0 p0 + a0 p1 וגם: Aw pn = bn pn + an pn+1 + an−1 pn−1 לכל .n > 0 שניתן לכתבם גם כיחס רקורסיה (AW − b0 ) p0 (AW − bn ) pn − An−1 pn−1 = a0 p 1 = an pn+1 לכל .n > 0 שמשמעותם לכל xנתון היא שמתקיים: )= (x − b0 ) p0 (x )= (x − bn ) pn (x) − an−1 pn−1 (x )a0 p1 (x )an pn+1 (x תהליך גרם־שמידט ואי תלות של 1, x, x2 , . . .מבטיחים גם שכל pnהוא פולינום ממעלה nממש )דהיינו xnמופיע בו עם מקדם שונה מאפס( ולכן נובע גם ש an 6= 0לכל ) nכי אחרת ינבע ש ) (x − bn ) pn (xהוא פולינום ממעלה n − 1וזו סתירה(. הערה 8.2.8בניסוח של המשפט כתבנו an 6= 0למעשה ניתן לכתוב .an > 0 אם מבינים את הגדרת } {p0 , p1 , p2 , . . .ואת תהליך גרם־שמידט כ״פשוט״ כך שלכל nהמקדם של xnב pnהוא חיוי ,אזי מתקיים גם עבור מקדמי יחס הרקורסייה ש .∀n an > 0 90 תימינפ הלפכמ יבחרמב םיראניל םירוטרפוא 8.קרפ הוכחה :רואים זאת באינדוקציה מתוך: )an pn+1 (x) = (x − bn ) pn (x) − an−1 pn−1 (x טענה 8.2.9 בסימונים של הוכחת המשפט האחרון ,נגדיר: 0 .. . 0 an−1 bn ... .. . .. . .. . an−1 0 .. . . a0 b0 .. b1 .. . .. .. a0 =0 . .. . 0 . ... AW,n 0 אזי האפסים של ) Pn+1 (xהם בדיוק הערכים העצמיים של .AW,n ˜( pn+1אזי: xמתקיים שx) = 0 : הוכחה :אם עבור ˜ ∈ R 0<j<n ˜( = ˜( x − b0 ) p0 )x ˜( = ˜( x − bn ) pj ˜( x) − aj−1 pj−1 )x ˜( = ˜( x − bn ) pn )x ˜( a0 p1 )x ˜( aj pj+1 )x ˜( an−1 pn−1 )x וזה גורר כי: כלומר ,ש: ˜( x) + a0 p1 ˜( x) = x˜p0 )x ˜( b0 p0 ˜( aj−1 pj−1 ˜( x) + bj pj ˜( x) + aj pj+1 ˜( x) = pj x) 0 < j < n ˜( an−1 pn−1 ˜( x) + bn pn x) = x ˜( ˜pn )x 0 .. ˜( p0 )x . )x ˜( p0 .. ˜ ... . =x 0 ˜( pn ˜( pn )x )x an−1 bn ... .. . .. . .. . an−1 0 .. . . .. . .. 0 a0 b1 .. . .. . ... b0 a0 0 . .. 0 c0 ˜( p0 )x xאזי ˜ .מצד שני ,אם ... וקטור עצמי של AW,nעם ערך עצמי ˜ לכן ... הוא וקטור עצמי של AW,nעם ערך עצמי x cn ˜( pn )x ,c0 6= 0ולכן ניתן לנרמל את הוקטור העצמי הנ״ל ע״י שדורשים.c0 = p0 (x) : ˜( cj = pjלכל .0 ≤ j ≤ nמכך שמדובר בוקטור עצמי נובע לכן גם ש: ואז רואים מיחס האינדוקציה שx) : ˜( an−1 pn−1 ˜( x) + bn pn x) = x ˜( ˜pn )x ולכן: ˜( an−1 pn+1 ˜( x) = 0 ⇒ pn+1 x) = 0 מסקנה 8.2.10 מכאן ניתן לראות גם שהאפסים של ) Pn (xלכל .n > 0נמצאים בקטע ] .[a, bיתר על כן ,ניתן גם להראות שלכל pnיש nאפסים שונים זה מזה. פרק 9 קצת על המבחן... אז מה יהיה במבחן? 3מתוך 4שאלות .צריך לדעת את המשפטים והוכחותיהם +תרגילי הוכחה ,מסקנות מהמשפטים .וכדאי לדעת הגדרות )ארז אוהב לשאול על הגדרות(. החומר עצמו יהיה חומר על ההרצאות ,אבל התרגול יכול לעזור. 91
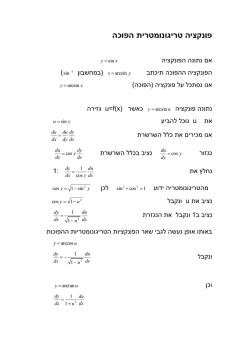
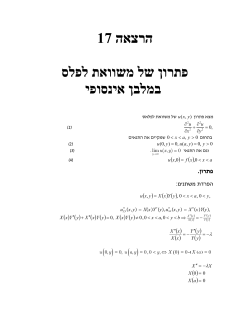

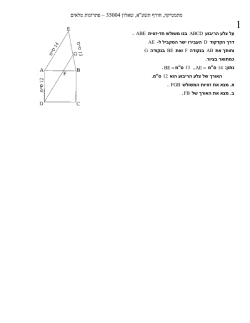




© Copyright 2026