
ד״ר רבייב דניאל (מעודכן לתאריך 10/11/16)
חדו"א 1מ' ) (104018־ חורף תשע"ז
הרצאות
ד"ר רבייב דניאל
17בנובמבר 2016
קובץ ההרצאות הנ"ל מפורסם לשימוש הסטודנטים אך יש לציין כי חומר הקורס המלא הוא הנלמד בהרצאות בפועל.
כמו כן ,ההרצאות נכתבות מידי שבוע ולפיכך ייתכנו טעויות דפוס .אתם מוזמנים לעדכן אותי בכל טעות אפשרית.
תוכן עניינים
1
2
מבוא . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
1.1
מטרת הקורס/נושאים מרכזיים . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
1.2
קבוצות ,כמתים וסימונים . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
1.3
לוגיקה . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
1.4
קבוצות של מספרים . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
1.5
הערך המוחלט . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
1.6
אי־שיוויונים . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
1.7
אקסיומות/הגדרות/משפטים . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
1.8
שיטות הוכחה . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
פונקציות . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
2.1
הגדרות ותכונות בסיסיות . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
2.2
פעולות על פונקציות . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
2.3
הפונקציות האלמנטריות . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16
3
קבוצות חסומות . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
20
4
גבולות של פונקציות . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
21
5
4.1
הגדרת הגבול . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
21
4.2
תכונות בסיסיות . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
4.3
אריתמטיקה של גבולות . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
25
4.4
גבולות מוכללים )גבול במובן הרחב( . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
28
4.5
אי־קיום הגבול . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
4.6
גבולות חד־צדדיים . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
4.7
המשך תכונות של גבולות . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
33
סדרות . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1
הגדרת הגבול . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
39
40
Dr. Rabayev Daniel
תוכן עניינים
6
5.2
תכונות בסיסיות ואריתמטיקה . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
41
5.3
סדרות מונוטוניות . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
44
5.4
תת־סדרות . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
5.5
משפט היינה ־ הקשר בין סדרות לפונקציות . . . . . . . . . . . . . . . . . . . . . . . . . . . .
47
פונקציות רציפות . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
47
6.1
הגדרה ותכונות בסיסיות . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
47
6.2
מיון נקודות אי־רציפות . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
49
2
Dr. Rabayev Daniel
1
1.1
מבוא
מטרת הקורס/נושאים מרכזיים
• מושג הגבול :שימושים ראשונים במאה ה־ 17ע"י ניוטון אך רק קושי במאה ה־ 19ייסד את ההגדרה הפורמלית
של מושג הגבול .הרעיון הוא שאפשר להיות "קרובים כרצוננו" לערך מסויים בהינתן קיום תנאי בסיס .מושג
זה חשוב לצורך הגדרה פורמלית וחישובים .מושג הגבול יופיע בכל נושא של הקורס.
דוגמאות:
.1נתבונן בסדרת המספרים הבאה:
1
, ...
1, 21 , 13 , ..., 100
האיבר הכללי הוא , n1כאשר .n ∈ Nברור כי ככל ש־ nגדל,
פעם לא "מגיעים" לאפס .לתופעה זו קוראים שאיפה לאפס.
1
n
מתקרב לאפס .עם זאת ,אברי הסדרה אף
.2נסמן .f (x) = xכאשר xשואף לערך ממשי ,x0ברור כי ערכי הפונקציה שואפים ל־) .f (x0
• מושג הרציפות :רציפות או אי־רציפות קשור לקיום הגבול בערכים בתחום ההגדרה של הפונקציה ובתנאי
שערך הגבול שווה לערך בו הפונקציה מוגדרת.
דוגמה :נסמן:
x 6= 1
2
x
x=1
7
= )f (x
כאשר איקס שואף לאפס ,ערכי הפונקציה שואפים ל־ .f (0) = 0אך כאשר איקס שואף לאחד ,ערכי הפונקציה
שואפים לאחד ולא ל־.f (1) = 7
• מושג הנגזרת :נגזרת של פונקציה ממשית ) f (xבנקודה x0היא קצב השינוי בערכי הפונקציה בסביבת ,x0
כלומר ,מחשבים את היחס הבא:
) f (x)−f (x0
x−x0
עבור ערכי xאשר "שואפים" ל־ .x0
דוגמאות:
3
1.1
Dr. Rabayev Daniel
מטרת הקורס/נושאים מרכזיים
) .1פיזיקה( חלקיק נע על קו ישר כאשר מהירותו אינה קבועה .נסמן ב־) s(tאת מיקום החלקיק בזמן .t > 0
נקבע נקודה aעל הישר ונבחין כי ) s(t) − s(aהוא ההעתק 1והיחס
)s(t)−s(a
t−a
נותן את המהירות הממוצעת בפרק זמן זה .כאשר "נשאיף" את tל־ ,aהמהירות הממוצעת "תשאף" למהירות
הרגעית בזמן .a
אם נסמן ב־) v(tאת מהירות החלקיק בזמן tאז היחס:
)v(t)−v(a
t−a
מתאר את התאוצה הממוצעת של החלקיק בפרק הזמן בין aל־ ,tושוב ,אם "נשאיף" את tל־ aנקבל "תאוצה
רגעית".
) .2כלכלה( נניח כי ) f (xמתארת את עלות היצור של xיחידות של מוצר מסויים .אם נקח h > 0נקבל אי
) f (a + h) − f (aמתאר את עלות היצור של hיחידות מוצר ,2היחס:
)f (a+h)−f (a
h
מתאר את העלת הממוצעת של מוצר יחיד כאשר מעלים את כמות היצור מ־ aיחידות ל־ a + hיחידות.
כאשר נשאיף את hלאפס ,נקבל את העלות השולית ,כלומר את העלות של יחידת מוצר כאשר נמצאים
ברמת יצור של aיחידות.
) .3חקירת פונקציה( אם ) f (xפונקציה אז בנקודה aהיחס:
)f (a+h)−f (a
h
מתאר את שיפוע הישר העובר דרך הנקודות המתאימת בגרף .אם "משאיפים" את hלאפס אז מקבלים
את השיפוע של המשיק לגרף הפונקציה בנקודה .aמכאן נקבל כי הנגזרת מסייעת לגלות תחומי עליה/ירידה
של הפונקציה ,נקודות קיצון וכו'.
• האינטגרל :נניח כי רוצים לחשב שטח מתחת לגרף של פונקציה אי־שלילית ) .f (xנקרב את השטח ע"י
מלבנים עם בסיס על ציר xאשר מגיעים בדיוק עד גרף הפונקציה .אם נחשב את שטח המלבנים ונסכום,
נקבל קירוב של השטח הרצוי .ברור שככל שנקטין את בסיס המלבנים נקבל קירוב טוב יותר לשטח הכלוא.
התהליך של "השאפת" אורך הבסיס של המלבנים לאפס הוא שוב תהליך גבולי.
1כלומר ,המרחק שהחלקיק עבר בין זמן aלזמן .t
2כאשר מעלים את היצור מ־ aיחידות ל־ a + hיחידות.
4
1.2
1.2
Dr. Rabayev Daniel
קבוצות ,כמתים וסימונים
קבוצות ,כמתים וסימונים
הגדרה 1.1קבוצה היא אוסף של איברים .נהוג לסמן את שם הקבוצה באותיות לטיניות גדולות ואת אברי הקבוצה
בין סוגריים מסולסלים .ניתן גם לרשום קבוצה באופן הבא:
} תנאי שייכות לקבוצה | איבר כללי { = A
דוגמאות:
.A = {1, 2, 3} .1
.B = {n | n = 2, 4, 6, 8, ...} .2
סימונים חשובים להמשך הקורס:
סימון
דוגמה
שייך
∈
}3 ∈ A = {1, 2, 3
לכל
∀
∀x ∈ A = {1, 2, 3} , x < 10
קיים
∃
∃x ∈ A = {1, 2, 3} , x < 2
שלילה
¬
¬∀ = ∃ , ¬∃ =6 ∃ = ∀,
הכלה
⊆
סכומים
P
)איבר כללי(
}{2, 4} ⊆ B = {n | n = 2, 4, 6, 8, ...
}A = {1, 2, 3} * B = {n | n = 2, 4, 6, 8, ...
n
P
1
i
=
1
n
+ ... +
1
3
+
1
2
1+
i=1
1.3
לוגיקה
אם Aו־ Bטענות כך שטענה Aגוררת קיום של טענה Bאז מסמנים:
A⇒B
אם טענה Aגוררת טענה Bוטענה Bגוררת טענה Aאז אומרים שהטענות שקולות ומסמנים:
A⇔B
שלילה לוגית:
A⇒B
m
¬A ⇐ ¬B
דוגמה" :יורד גשם ⇐ יש עננים" שקול לוגית ל" :אין עננים ⇐ לא יורד גשם".
5
1.4
1.4
Dr. Rabayev Daniel
קבוצות של מספרים
קבוצות של מספרים
קבוצות המספרים הסטנדרטיות הן:
• המספרים הטבעיים:
}N = {1, 2, 3, ...
• המספרים השלמים:
}Z = {..., −3, −2, −1, 0, 1, 2, 3, ...
• המספרים הרציונליים:
o
| m ∈ Z, n ∈ N
nm
n
=Q
• המספרים הממשיים מסומנים ב־ Rוהם מכילים את כל המספרים המוכרים.
מתקיים:
N⊆Z⊆Q⊆R
קטעים:
}= {x ∈ R | a < x < b
)(a, b
}= {x ∈ R | a ≤ x ≤ b
][a, b
}= {x ∈ R | a ≤ x < b
)[a, b
}= {x ∈ R | a < x
)∞ (a,
}= {x ∈ R | a ≤ x
)∞ [a,
}(−∞, a) = {x ∈ R | a > x
}(−∞, a] = {x ∈ R | a ≥ x
6
Dr. Rabayev Daniel
1.5
הערך המוחלט
קטע פתוח המכיל ערך ממשי ,a ∈ Rנקרא סביבה של .aנקודה aבקטע Iהיא נקודה פנימית של Iאם
קיימת ל־ aסביבה המוכלת ב־ .Iנדגיש כי נקודת קצה של קטע היא בהכרח לא נקודה פנימית.
דוגמה :הקטעים ) (a − 5, a + 22), (a − 1, a + 1הם סביבות של .aאם ] I = [a − 10, a + 10אז aהיא
נקודה פנימית של Iאך a + 10לא נקודה פנימית.
1.5
הערך המוחלט
נגדיר פונקציה
x≥0
x
x<0
−x
= ||x
המשמעות הגיאומטרית של | |xהיא המרחק של xמהראשית )באופן כללי ,המרחק של aמ־ xהוא |.(|x − a
מתקיים:
• |x| ≤ aאם ורק אם .−a ≤ x ≤ a
• |x| ≥ aאם ורק אם x ≥ aאו .x ≤ −a
דוגמה) :סביבה של נקודה( יהא .δ > 0כל האיקסים אשר קרובים ל־ aעד כדי δמקיימים .|x − a| < δאו
באופן שקול:
|x − a| < δ
m
−δ < x − a < δ
m
a−δ <x<δ+a
m
)x ∈ (a − δ, a + δ
1.6
אי־שיוויונים
טענה ) 1.2כללים בסיסיים( יהיו a, b, c, d ∈ R
.1אם a < bו־ c > 0אז .ac < bc
.2אם a < bו־ c < 0אז .ac > bc
.3אם a ≤ bו־ c ≤ dאז .a + c ≤ b + d
7
1.7
Dr. Rabayev Daniel
אקסיומות/הגדרות/משפטים
.4אי־שיוויון המשולש.||a| − |b|| ≤ |a ± b| ≤ |a| + |b| :
הוכחה) :אי־שיוויון המשולש( נוכיח את המקרה | .|a + b| ≤ |a| + |bמההגדרה ברור כי
|−|a| ≤ a ≤ |a
|−|b| ≤ b ≤ |b
נחבר את אי־השיוויונים ונקבל:
|−(|a| + |b|) ≤ a + b ≤ |a| + |b
וסיימנו.
יתר המקרים ,משיקולים דומים.
הערה 1.3חיסור אי־שיוויונים אסור .לדוגמה:
10 ≤ 30
2 ≤ 29
אבל
10 − 2 30 − 29
מה עושים? כופלים את אי־השיוויון המתאים ב־ −1ומחברים.
1.7
אקסיומות/הגדרות/משפטים
• אקסיומה :חוק מתמטי שאנו מניחים את נכונותו ואין באפשרותינו להוכיח אותו.
דוגמה :חילופיות חיבור של מספרים ממשיים.
• הגדרה :מתן שם/סימון לאובייקט/תכונה מתמטית.
דוגמאות:
– מספר טבעי הוא איבר בקבוצה .N
– מספר זוגי הוא איבר nבקבוצה Zעבורו קיים m ∈ Zכך ש.n = 2m :
• משפט :אמירה המצביעה על קשר )חשוב( בין עצמים ,מושגים או תכונות מתמטיות .משפט מתחיל בהנחות,
ומסתיים בתוצאות.
דוגמה :יהיו ,a < b ∈ Rאז קיים c ∈ Rהמקיים ).c ∈ (a, b
8
Dr. Rabayev Daniel
1.8
שיטות הוכחה
• משפט הפוך :החלפה בין התוצאה להנחה .המשפט ההפוך לא בהכרח נכון )גם כאשר המשפט הנתון נכון(.
דוגמה :בהינתן המשפט" :אם a, bמספרים שלמים אז a + bמספר שלם" ,המשפט ההפוך הוא" :אם a + b
מספר שלם אז a, bמספרים שלמים".
• שקילות) :או אפיון( אם משפט והמשפט ההפוך נכונים אז אומרים שהטענות שקולות .אם Aו־ Bהן טענות
שקולות ,אז נהוג לסמן A ⇐⇒ Bאו Aאם ורק אם .B
דוגמה k :מספר שלם וזוגי אם ורק אם k2מספר שלם.
• משפט נגדי :שלילה לוגית של משפט נתון.
דוגמה :בהינתן המשפט ,"∀a > 0, |x| < a ⇒ x = 0 " :השלילה הלוגית היא.x 6= 0 ⇒ ∃a > 0, |x| > a" :
• טענה/למה :בדומה למשפט רק בעל חשיבות פחות מרכזית ,בד"כ כלי עזר להוכחת משפט.
• הוכחה :מראים כי המסקנה הרצויה מתקיימת כאשר מתחילים בהנחות הנתונות ובהסתמך על אקסיומות,
הגדרות ,טענות ומשפטים .יש מספר שיטות הוכחה שנראה בקרוב.
1.8
שיטות הוכחה
• הוכחה ישירה :שימוש ישיר בהנחות לצורך קבלת המסקנה.
דוגמה :יהא .n ∈ Zאם nזוגי אז n2זוגי.
הוכחה :לפי הגדרה ,קיים m ∈ Zכל שמתקיים .n = 2mכעת:
) n2 = (2m)2 = 4m2 = 2(2m2
מסגירות לכפל נובע כי 2m2 ∈ Zולכן ,לפי הגדרה ) 2(2m2הוא מספר זוגי וסיימנו.
• הוכחה נגדית )שלילה לוגית( :להוכיח בדרך ישירה את השלילה הלוגית של המשפט.
דוגמה :יהא .n ∈ Zאם n2אי־זוגי אז nאי־זוגי.
הוכחה :השלילה הלוגית של הטענה היא" :יהא .n ∈ Zאם nזוגי אז n2זוגי" .את הטענה הזאת הוכחנו
בדוגמה הקודמת.
• הוכחה על דרך השלילה :מניחים כי התוצאה לא נכונה ובעזרת ההנחות מגיעים לסתירה )כלומר מקבלים כי
אחת ההנחות לא מתקיימת או שעובדה מתמטת ידועה "לא נכונה"(.
דוגמאות:
– אם לכל a > 0מתקיים |x| < aאז .x = 0
הוכחה :נניח בשלילה כי לכל a > 0מתקיים |x| < aאבל .x 6= 0נבחר | a = |xונקבל כי:
||x| < a = |x
וזאת סתירה.
9
Dr. Rabayev Daniel
1.8
שיטות הוכחה
√
∈. 2
– /Q
הערה :האם אכן קיים מספר כזה? כן ,נפעיל את משפט פיתגורס על משולש ישר זווית עם ניצבים
√
באורך 1ואז אורך היתר הוא . 2
√
√
הוכחה :נניח בשלילה כי , 2 ∈ Qאז מההגדרה קיימים m, n ∈ Zכך ש:
. 2 = mנניח ללא הגבלת
n
הכלליות כי זהו שבר מצומצם ,כלומר m, nמספרים זרים )להסביר את החשיבות( .נעלה בריבוע:
m2
n2
√
= 2 = ( 2)2
m
2n2 = m2
מכאן נסיק כי m2זוגי ,מטענה קודמת m ,זוגי .לכן קיים k ∈ Zכל ש .m = 2k :נציב:
2n2 = m2 = (2k)2 = 4k 2
m
n2 = 2k 2
מכאן נסיק כי n2זוגי ולכן גם nזוגי .קיבלנו עם כך כי 2הוא גורם משותף של m, nבסתירה לכך
שהנחנו שהם זרים.
הערות:
.1כאשר התוצאה של משפט/טענה היא קיום של איבר ,קוראים להוכחה גם הוכחת קיום .באופן כללי יש שני
סוגים של הוכחות קיום:
)א( הוכחה קונסטרוקטיבית ,כלומר הוכחה מציעה אלגוריתם למציאת האיבר המבוקש.
)ב( הוכחה לא קונסטרוקטיבית ,כלומר הוכחה משתמשת באקסיומות וטענות אחרות אבל לא ניתן לבנות
באופן מפורש את האיבר המבוקש.
דוגמה :בין כל שני מספרים רציונליים יש מספר רציונלי ואי־רציונלי.
הוכחה :יהיו a, b ∈ Rובה"כ נניח כי .a < bאז נבחר n ∈ Nהמקיים:
>0
1
b−a
>n
m
nb − na > 1
כלומר ,המרחק בין nbל־ naהוא גדול מאחד ולכן קיים m ∈ Zהמקיים:
na < m < nb
m
<b
m
n
<a
והוכחנו כי קיים מספר רציונלי בין aל־.b
כעת ,עבור אותם a, bנפעיל את הטיעון הקודם עבור
10
√a , √b
2
2
ונקבל קי קיים מספר רציונלי
k
l
בין
Dr. Rabayev Daniel
, √a2 , √b2כלומר:
√b
2
<
k
l
<
√a
2
m
√
a < kl 2 < b
√
∈ kl 2וסיימנו.
מסגירות לכפל של הרציונליים נובע כי / Q
.2סגנון הוכחה חשוב נוסף הוא "הוכחה על־פי מקרים" :יש לעבור על כל המקרים האפשריים ולוודא נכונותן.
דוגמה :הוכיחו כי קיימים שני מספרים אי־רציונליים x, yהמקימים .xy ∈ Q
√
הוכחה :נביט ב־ 2ונבחין בין שני מקרים:
• אם ∈ Q
∈
• אם / Q
2
2
√
2
√
2
√
√
אז נבחר 2
√
= x = yוסיימנו.
אז נבחין כי:
√
√ 2
√ √ 2
( 2 ) 2= 2 =2∈Q
√
√ √2
נבחר 2 , y = 2
2
= xונסיים.
פונקציות
הגדרות ותכונות בסיסיות
2.1
פונקציה מקבוצה Xלקבוצה Yהיא חוק התאמה בין אברי הקבוצה Xלאברי הקבוצה .Y
הגדרה 2.1תהיינה .X, Y ⊆ Rפונקציה fמ־ Xל־ Yהיא התאמה המתאימה לכל איבר ב־ Xאיבר יחיד ב־ .Y
מסמנים:
f :X→Y
f (x) = y
) f (xהוא כלל ההתאמה של fובמקרים רבים נהוג לרשום את כלל ההתאמה במקום הכתיב המלא של הפונקציה.
התחום 3של fהוא Xוהטווח 4של fהוא . Yאם f (x) = yאז yהוא התמונה של xו־ xהוא מקור 5של .y
דוגמאות:
.1
f :R→R
f (x) = x2
במקרה זה אפשר פשוט לרשום f (x) = x2ונקבל בדיוק את אותה הפונקציה .נבחין כי התמונה של 1, −1
היא 1ולפיכך ,ל־ 1יש שני מקורות.
3נעיר כי התחום גם נקרא תחום ההגדרה או תחום ההגדרה הטבעי ואם הוא לא נתון מפורשות אז הוא נבחר להיות המקסימלי
האפשרי עבור הפונקציה הנתונה.
4אם הטווח לא נתון מפורשות אז הוא .R
5נציין כי מקור הוא לא בהכרח יחיד.
11
2.1
Dr. Rabayev Daniel
הגדרות ותכונות בסיסיות
.2
f : [0, ∞) → R
f (x) = x2
במקרה זה יש להדגיש את התחום.
√
.3אם מגדירים f (x) = xאז מהגדרת השורש ברור כי התחום הוא )∞ [0,ולכן:
f : [0, ∞) → R
√
f (x) = x
איך מגדירים פונקציה?
.1מפורשות ע"י נוסחה ,לדוגמה:
f (x) = x + 1
.2מפורשות אבל בחלוקה לתחומים ,לדוגמה:
x≥0
x
x<0
−x
= |f (x) = |x
.3ע"י מתן הסבר מילולי ,לדוגמה :אם נסמן }הערך השלם הגדול ביותר שאינו עולה על ,[x] =|xאז נוכל
להגדיר:
f :R→R
]f (x) = [x
הביטוי ] [xנקרא הערך השלם של .xתכונה בסיסית וחשובה היא שלכל x ∈ Rמתקיים:
x − 1 < [x] ≤ x
הגדרה 2.2הגרף של פונקציה ) f (xהוא אוסף הנקודות ) (x, yבמישור המקיימות .f (x) = y
12
Dr. Rabayev Daniel
2.1
דוגמאות:
.1
f : [0, ∞) → R
√
f (x) = x
.2
f :R→R
]f (x) = [x
הגדרה 2.3התמונה של פונקציה f : X → Yהיא הקבוצה:
}Im(f ) = {f (x) ∈ Y | x ∈ X} = {y ∈ Y | ∃x ∈ X, f (x) = y
אם התמונה שווה לטווח ,כלומר } ,Y = Im{fאז אומרים כי הפונקציה היא על.
בדוגמאות שלנו:
√
)∞ Im ( x) = [0,
Im ([x]) = Z
הגדרה 2.4אומרים כי פונקציה f : X → Yהיא חד־חד־ערכית אם:
) ∀x1 , x2 ∈ X, x1 6= x2 ⇒ f (x1 ) 6= f (x2
13
הגדרות ותכונות בסיסיות
Dr. Rabayev Daniel
בדוגמאות שלנוx :
√
2.2
פעולות על פונקציות
היא חח"ע ואילו ] [xלא חח"ע.
הגדרה 2.5נאמר כי פונקציה f : X → Yהיא מונוטונית עולה אם:
) ∀x1 < x2 ∈ X, f (x1 ) ≤ f (x2
ונאמר כי הפונקציה מונוטונית עולה ממש אם:
) ∀x1 < x2 ∈ X, f (x1 ) < f (x2
באופן אנלוגי מגדירים מונוטונית יורדת ומונוטונית יורדת ממש.
הערה 2.6קל לראות כי פונקציה מונוטונית ממש היא תמיד חח"ע.
√
בדוגמאות שלנו x :היא מונוטונית עולה ממש ואילו ] [xמונוטונית עולה.
הגדרה 2.7פונקציה f : X → Yנקראת חסומה מלמעלה )מלעיל( אם קיים M ∈ Rעבורו
∀x ∈ X, f (x) ≤ M
fנקראת חסומה מלמטה )מלרע( אם קיים ם N ∈ Rעבורו
∀x ∈ X, f (x) ≥ N
M, Nנקראים חסמים מלעיל ומלרע בהתאמה.
נאמר כי fחסומה אם היא חסומה מלמעלה ומלמטה.
√
בדוגמאות שלנו x :חסומה מלמטה ע"י אפס ואילו ] [xלא חסומה מלמעלה ולא מלמטה.
הגדרה 2.8נאמר כי פונקציה ) f (xהיא זוגית אם מתקיים לכל xבתחום ) .f (x) = f (−xנאמר כי פונקציה )f (x
היא אי־זוגית אם מתקיים לכל xבתחום ).f (x) = −f (−x
נבחין כי פונקציה זוגית היא סימטרית ביחס לציר Yואילו פונקציה אי־זוגות היא אנטי־סימטרית ביחס לציר .Y
כמו־כן ,קל לראות כי מכפלה/מנה של פונקציות זוגיות/אי־זוגיות היא גם פונקציה זוגית/אי־זוגית )ניתן להתייחס
לזוגיות כ־" "+ואי־זוגיות כ־"־" לצורך קביעת זוגיות/אי־זוגיות של הפונקציה החדשה(
2.2
פעולות על פונקציות
חיבור/חיסור/כפל/חילוק
תהיינה f, gפונקציות בעלות תחום הגדרה זהה .נגדיר פונקציה חדשה f + gבאופן הבא:
)(f + g)(x) = f (x) + g(x
14
2.2
Dr. Rabayev Daniel
פעולות על פונקציות
זהו חיבור נקודתי.באופן דומה מגדירים את יתר הפעולות:
)(f − g)(x) = f (x) − g(x
)(f g)(x) = f (x)g(x
)(f /g)(x) = f (x)/g(x
(g(x) 6= 0),
נבחין כי מחילופיות החיבור/חיסור/כפל של מספרים ממשיים נובע כי גם הפעולות המקבילות בפונקציות חילופיות.
הרכבה
תהיינה f : A → B, g : B → Cפונקציות .ההרכבה של gעל fמוגדרת ומסומנת באופן הבא:
g◦f :A→C
))g ◦ f (x) = g(f (x
דוגמה :אם ,f (x) = sin(x), g(x) = x2אז:
) f ◦ g(x) = sin(x2
g ◦ f (x) = (sin(x))2
ברור כי השניים לא שווים ומכאן נסיק כי הרכבת פונקציות היא לא חילופית.
פונקציה הפוכה
אם f : A → Bחח"ע ועל אז לכל ,b ∈ Bקיים a ∈ Aיחיד המקיים .f (a) = bפונקציה כנ"ל נקראת פונקציה
הפיכה .הפונקציה ההפוכה של fמסומנת:
f −1 : B → A
f −1 (b) = a
אם f, f −1פונקציות הפוכות אז מתקיימות הזהויות:
∀a ∈ A, f −1 ◦ f (a) = a
∀b ∈ B, f ◦ f −1 (b) = b
מבחינה גיאומטרית ,הגרף של fו־ f −1זהים במישור )עם החלפת תפקידים בין הצירים( .אם רוצים לצייר את
הגרף של פונקציה fו־ f −1כפונקציות של אותו המשתנה אז נשרטט את הגרף של fוהגרף של f −1יהיה שיקוף
הגרף של fבישר :y = x
15
2.3
Dr. Rabayev Daniel
הפונקציות האלמנטריות
דוגמאות:
.1הפונקציה f (x) = x3היא חח"ע ועל ,Rמכאן ,היא הפיכה .הפונקציה ההפוכה היא x
√
3
= ).f −1 (x
.2הפונקציה f (x) = x2לא חח"ע ועל בתחום ההגדרה הטבעי שלה אבל אם נצמצם את ת"ה והטווח לקרן
)∞ ,[0,נקבל פונקציה הפיכה .הפונקציה ההפוכה היא:
)∞ f −1 : [0, ∞) → [0,
√
f −1 (x) = x
הערה :אין לבלבל בין הסימון f −1לבין . f1
2.3
הפונקציות האלמנטריות
פולינומים
פולינום ממעלה n ∈ Nהוא ביטוי מהצורה:
ai x i
Pn
i=0
= p(x) = an xn + ... + a1 x + a0
an , ..., a1 , a0 ∈ R, an 6= 0
deg(p) = n
ת"ה של פולינום הוא .R
דוגמאות:
• פולינום ממעלה אפס הוא פונקציה קבועה.
• פולינום ממעלה 1הוא פונקציה לינארית.
• פולינום ממעלה 2הוא פונקציה ריבועית.
16
Dr. Rabayev Daniel
2.3
הפונקציות האלמנטריות
פונקציה רציונלית
פונקציה רציונלית היא מנה של פולינומים .ת"ה הוא כל המספרים הממשים פרט לאילו המאפסים 6את המכנה.
דוגמה :הפונקציה ,f (x) = x1הידועה גם כהיפרבולה:
פונקציה מעריכית
עבור a > 0ושונה מ־ ,1נגדיר .f (x) = axנביט בגרף:
תכונות:
• .ax+y = ax ay
• .(ax )y = axy
•
1
ax
= .a−x
• אם a > 1אז axמונוטונית עולה ממש ואם a < 1אז axמונוטונית יורדת ממש.
ת"ה הוא תמיד Rוהתמונה היא )∞ .(0,הפונקציה המעריכית היא חח"ע ועל )∞ .(0,
מקרה פרטי חשובa = e = 2.71282... :
6כידוע ,יש לכל היותר מאפסים כמעלת המכנה.
17
2.3
Dr. Rabayev Daniel
הפונקציות האלמנטריות
פונקציה לוגריתמית
הפונקציה המעריכית f (x) = axהיא חח"ע עם תמונה שהיא הקרן )∞ (0,ולכן אם נצמצם את הטווח לקרן
)∞ (0,נקבל פונקציה הפיכה:
f −1 : (0, ∞) → R
)f −1 (x) = loga (x
במקרה הפרטי בו a = eנהוג לסמן ):loge (x) = ln(x
תכונות:
• .loga (xy) = loga x + loga y
• .loga (xy ) = yloga x
• אם a > 1אז הפונקציה מונוטונית עולה ממש ואם a < 1אז היא מונוטונית יורדת ממש.
פונקציות טריגונומטריות
הגדרה 2.9זווית היא בת αרדיאנים אם אורך הקשת שהיא חוסמת במעגל ברדיוס 1הוא .αבמעגל יש 2π
רדיאנים ולכן
2π
α
360 deg
= αrad
פונקציית הסינוס ):sin (x
18
Dr. Rabayev Daniel
2.3
הפונקציות האלמנטריות
פונקציית הקוסינוס ):cos (x
כאשר xנתון ברדיאנים .נוח להיעזר במעגל היחידה:
זהויות חשובות:
• .sin2 (x) + cos2 (x) = 1
• ).sin(2x) = 2sin(x)cos(x
• ).cos(2x) = cos2 (x) − sin2 (x
) tan (x) = sin(xבתחום ההגדרה המתאים.
מגדירים גם
)cos(x
בכדי לקבל פונקציות הפוכות לפונקציות הטריגונומטריות ,חייבים להגביל את ת"ה והטווח של הפונקציות
הטריגונומטריות .למשל ,עבור הסינוס:
דוגמה :נראה כי
π
2
= ) .arcsin(x) + arccos(xנבחין כי:
19
Dr. Rabayev Daniel
x
)⇒ α = arcsin(x
1
x
= )cos(α
)⇒ β = arccos(x
1
= )sin(β
מכך שסכום הזוויות החדות במשולש הוא , π2נקבל
3
π
2
= .α + β
קבוצות חסומות
הגדרה 3.1קבוצה A ⊂ Rנקראת חסומה מלמעלה )מלעיל( אם קיים M ∈ Rעבורו:
∀x ∈ A, x ≤ M
Mכזה נקרא חסם מלעיל.
קבוצה A ⊂ Rנקראת חסומה מלמטה )מלרע( אם קיים m ∈ Rעבורו:
∀x ∈ A, x ≥ m
mכזה נקרא חסם מלרע.
קבוצה נקראת חסומה אם היא חסומה למעיל ומלרע.
דוגמה :אם )∞ A = [0,אז 0, −1הם חסמים מלרע אבל Aלא חסומה מלעיל.
הגדרה 3.2החסם מלעיל הקטן ביותר של קבוצה Aנקרא הסופרימום )חסם עליון( של Aומסמנים ) .sup(Aאם
sup(A) ∈ Aאז הוא נקרא מקסימום ומסמנים ).sup(A) = max(A
החסם מלרע הגדול ביותר של קבוצה Aנקרא האינםימום )חסם תחתון( של Aומסמנים ) .inf (Aאם
inf (A) ∈ Aאז הוא נקרא מינימום ומסמנים ).inf (A) = min(A
הערה 3.3אקסיומת השלמות :לכל קבוצה לא ריקה של מספרים ממשיים החסומה מלעיל/מלרע יש סופרימום/אינפימום.
כלומר ,קבוצת המספרים הממשיים היא מערכת שלמה "ללא חורים".
ניזכר כי ראינו כבר הגדרה עבור פונקציות חסומות וקבוצות חסומות מהוות הכללה של המושג .כאשר מדברים
על חסם מלעיל או מלרע של פונקציה ,בעצם מדברים על החסמים של התמונה:
})Im (f ) = {f (x) | x ∈ Domain (X
מכאן ,אפשר גם להכליל לסופרימום ואינפימום של פונקציה.
דוגמאות:
20
Dr. Rabayev Daniel
A = [0, 1], B = (0, 1), C = [0, 1) .1
.2הפונקציות ) sin (x) , cos (xחסומות בין −1ל־ 1ומקבלות גם מקסימום.
.3עבור:
x 6= 0
1
x2
x=0
−1
= )f (x
התמונה היא )∞ .{−1} ∪ (0,נקבל כי fלא חסומה מלעיל אבל היא חסומה מלרע ע"י −1והיא גם מקבלת
שם מינימום.
.4עבור
x 6= 0
1
x2
x=0
1
= )f (x
התמונה היא )∞ .(0,שוב נקבל כי fלא חסומה מלעיל אבל הפעם היא 0הוא האינפימום ואין לה מינימום.
4
4.1
גבולות של פונקציות
הגדרת הגבול
הגדרה 4.1סביבה מנוקבת של a ∈ Rהיא סביבה של aשהוציאו ממנה את .a
דוגמה (a − 1, a) ∪ (a, a + 1) = (a − 1, a + 1) − {a} :היא סביבה מנוקבת של .a
הגדרה 4.2יהא ,ε > 0הקטע ) (a − ε, a + εנקרא סביבת־ εשל .a
נבחין כי ניתן לייצג סביבת־ εשל aבאופן הבא:
|x − a| < ε
)x ∈ (a − ε, a + ε
⇒⇐
סביבת־ εמנוקבת של aהיא:
0 < |x − a| < ε
⇒⇐
)x ∈ (a − ε, a) ∪ (a, a + ε
הרעיון של סביבת־ εהוא סביבה "קטנה" של aכך שכל איקס בסביבה הוא "קרוב" ל־.a
21
Dr. Rabayev Daniel
4.2
תכונות בסיסיות
הגדרה ) 4.3גבול של פונקציה( תהא fפונקציה המוגדרת בסביבה מנוקבת של .aנאמר כי הגבול של fבנקודה
aקיים ושווה ל־ Lאם:
∀ε > 0, ∃δ > 0, ∀x, 0 < |x − a| < δ, |f (x) − L| < ε
נסמן .limf (x) = L
x→a
הערה :חשוב לציין שיש לבחור דלתא ספציפי לכל אפסילון ,בד"כ ,דלתא הוא פונקציה של אפסילון .בפרט ,מותר
לחסום את דלתא מלמעלה.
דוגמאות:
.1נוכיח לפי הגדרה כי .lim3x + 4 = 4נבחין כי:
x→0
|3x + 4 − 4| = |3x| = 3|x − 0| < 3δ
ולכן ,אם נבחר
ε
3
= δנקבל את הנדרש.
.2נוכיח לפי הגדרה כי ) .limsin(x) = sin(aאכן ,נבחין כי:
x→a
≤ 2 x−a = |x − a| ≤ δ
cos x+a
2
2
x−a
)∗(
2
|sin(x) − sin(a)| = 2sin
)∗( בבירור ,|cos (x)| ≤ 1בהמשך נוכיח באופן אלמנטרי כי לכל xמתקיים |.|sin(x)| ≤ |x
ולכן ,אם נבחר δ = εנקבל את הנדרש.
∈ .aאכן ,לכל ε > 0נבחר:
.3נוכיח כי ] lim[x] = [aעבור / Z 7
x→a
δ = min {|a − [a]| , |a − ([a] + 1)|} > 0
ונקבל:
∀x, 0 < |x − a| < δ, |[x] − [a]| = |[a] − [a]| = 0 < ε
כלומר ,הגדרת הגבול מתקיימת.
4.2
תכונות בסיסיות
נוכיח כעת מספר תכונות שימושיות.
טענה 4.4אם limf (x) = Lאז |.lim|f (x)| = |L
x→a
x→a
7עבור a ∈ Zהגבול לא קיים .נוכיח בהמשך בעזרת גבולות חד־צדדיים.
22
Dr. Rabayev Daniel
4.2
תכונות בסיסיות
הוכחה :מאי־שיוויון המשולש ,נבחין כי:
|||f (x)| − |L|| ≤ |f (x) − L
כעת ,יהא .ε > 0מהנתון ,קיים δ > 0כך שלכל xהמקיים 0 < |x − a| < δמתקיים:
|f (x) − L| < ε
ולכן ,עבור אותו ה־ ,δנקבל:
∀x, 0 < |x − a| < δ, ||f (x)| − |L|| ≤ |f (x) − L| < ε
הערה :הכיוון ההפוך לא נכון ,למשל לפונקציה:
x≥0
1
x<0
−1
= )f (x
אין גבול באפס אבל |f (x)| = 1ולכן .lim|f (x)| = 1עם זאת ,כאשר L = 0הטענה נכונה .אכן ,אם L = 0
x→0
אז מההגדרה:
∀x, 0 < |x − a| < δ, ||f (x)| − 0| < ε
אבל
||||f (x)| − 0|| = ||f (x)|| = |f (x) − 0
ולכן .limf (x) = 0
x→0
טענה 4.5נניח כי ,limf (x) = Lאז:
x→a
.1יש סביבה מנוקבת של aאשר בה fחסומה.
.2לכל ,K < Lקיימת סביבה מנוקבת של aאשר בה ) f (x) > Kבאופן אנלוגי עבור .(M > L
23
Dr. Rabayev Daniel
4.2
תכונות בסיסיות
הוכחה .1 :מהגדרת הגבול:
∀ε > 0, ∃δ > 0, ∀x, 0 < |x − a| < δ, |f (x) − L| < ε
ומהגדרת הערך המוחלט:
|f (x) − L| < ε
m
L − ε < f (x) < L + ε
כלומר ,בסביבה f ,0 < |x − a| < δ :חסומה מלעיל ומלרע.
.2יהא .K < Lנבחר ε = L − Kומהסעיף הראשון נקבל שלכל xהמקיים 0 < |x − a| < δמתקיים:
|f (x) − L| < ε = L − K
כלומר:
K < f (x) < 2L
מסקנה 4.6אם limf (x) = L > 0אז קיימת סביבה של aאשר בה fחיובית.
x→a
טענה ) 4.7יחידות הגבול( אם קיים ,limf (x) = Lאז הוא יחיד.
x→a
הוכחה :נניח בשלילה כי קיימים ) M 6= Lבה"כ (M > L ,כך ש limf (x) = Lוגם .limf (x) = Mעבור
x→a
M −L
2
= ,εמהגדרת הגבול נקבל:
∃δ1 > 0, ∀x, 0 < |x − a| < δ1 , |f (x) − L| < ε
∃δ2 > 0, ∀x, 0 < |x − a| < δ2 , |f (x) − M | < ε
עבור } ,δ = min{δ1 , δ2נקבל שלכל xהמקיים 0 < |x − a| < δמתקיים:
M −L
|f (x) − L| < ε = 2
M −L
2
= |f (x) − M | < ε
24
x→a
Dr. Rabayev Daniel
4.3
אריתמטיקה של גבולות
כלומר:
M +L
2
M −L
2
=
3M −L
2
=
M −3L
− 2 < f (x) < L +
M −L
2
< f (x) < L +
M +L
2
כלומר
M +L
2
< )< f (x
M +L
2
וזאת סתירה.
4.3
אריתמטיקה של גבולות
עד כה ,חישבנו גבול על־פי הגדרה.כעת ,נפתח כלים אשר יסייעו לנו לחשב גבולות ,בהסתמך על גבולות ידועים.
משפט 4.8תהיינה f, gפונקציות פונקציות.
.1אם הן המוגדרות בסביבה מנוקבת של aומקיימות:
limf (x) = L
x→a
limg(x) = M
x→a
אז הגבולות הבאים קיימים:
)א( .∀α ∈ R, limαf (x) = αL
x→a
)ב( .lim(f (x) ± g(x)) = L ± M
x→a
)ג( .lim(f (x)g(x)) = LM
)ד( אם ,M 6= 0אז:
x→a
)f (x
L
.lim( g(x) ) = M
x→a
) .2הרכבה( אם:
limf (x) = L
x→a
lim g(x) = a
x→x0
אז:
lim f ◦ g(x) = L
x→x0
25
Dr. Rabayev Daniel
4.3
אריתמטיקה של גבולות
הערה :אריתמטיקה נכונה רק בכיוון הנתון במשפט ,כלומר מכך ש ,lim (f (x) + g (x)) = L + M :לא ניתן
x→a
להסיק כי
limf (x) = L
x→a
limg(x) = M
x→a
הוכחה) :א( יהא .ε > 0מהגדרת הגבול ,limf (x) = Lעבור
x→a
ε
||α
= ε0
∃δ > 0, ∀x, 0 < |x − a| < δ, |f (x) − L| < ε0
ועבור :αf
∀x, 0 < |x − a| < δ, |αf (x) − αL| = α|f (x) − L| < αε0 = ε
)ב( יהא .ε > 0עבור
ε
2
= ,ε0מהגדרת הגבול נקבל:
∃δ1 > 0, ∀x, 0 < |x − a| < δ1 , |f (x) − L| < ε0
∃δ2 > 0, ∀x, 0 < |x − a| < δ2 , |g(x) − M | < ε0
ולכן עבור } δ = min{δ1 , δ2נקבל כי לכל xהמקיים 0 < |x − a| < δמתקיים:
|f (x) + g(x) − L − M | ≤ |f (x) − L| + |g(x) − M | < ε0 + ε0 = 2ε0 = ε
)ג( יהא .ε > 0מטענה קודמת ,נובע כי קיים T > 0אשר חוסם את fבסביבה של .a
עבור ) ,ε1 = 2(|Mε|+1מהגדרת הגבול נקבל:
∃δ1 > 0, ∀x, 0 < |x − a| < δ1 , |f (x) − L| < ε1
כיוון שתמיד ניתן להקטין את ,δ1אפשר להניח כי Tהוא חסם של fבסביבה ) .(a − δ1 , a + δ1
עבור ,ε2 = 2Tεמהגדרת הגבול נקבל:
∃δ2 > 0, ∀x, 0 < |x − a| < δ2 , |g(x) − M | < ε2
ולכן עבור } ,δ = min{δ1 , δ2לכל xהמקיים 0 < |x − a| < δנקבל:
= | |f (x)g(x) − LM
≤ | |f (x)g(x) − LM + f (x)M − f (x)M
≤ |)|f (x)(g(x) − M ) + M (f (x) − L
ε ε
+ =ε
2 2
≤ |f (x)||g(x) − M | + |M ||f (x) − L| < T ε2 + |M |ε1
26
Dr. Rabayev Daniel
4.3
אריתמטיקה של גבולות
)ד( יהא .ε > 0מטענה קודמת ומכך ש־ ,M 6= 0נובע כי קיימת סביבה של aבה מתקיים:
| |M
1
2
⇒⇐
<
2
|)|g(x
| |M
> |)|g(x
)∗(
עבור
| ε|M
4
= ,ε1מהגדרת הגבול נקבל:
∃δ1 > 0, ∀x, 0 < |x − a| < δ1 , |f (x) − L| < ε1
כיוון שתמיד ניתן להקטין את ,δ1אפשר להניח כי )∗( מתקיים בסביבה ) .(a − δ1 , a + δ1
ε|M |2
) ,ε2 = 4(|L|−1מהגדרת הגבול נקבל:
עבור
∃δ2 > 0, ∀x, 0 < |x − a| < δ2 , |g(x) − M | < ε2
ולכן עבור } ,δ = min{δ1 , δ2לכל xהמקיים 0 < |x − a| < δנקבל:
) f (x
L
−
= g(x) M
)) M (f (x) − L) L(M − g(x
≤
+
) M g(x
)M g(x
)) M (f (x) − L) L(M − g(x
+
≤ ) M g(x) M g(x
|)|f (x) − L| |L||M − g(x
+
≤
|)|g(x
|)|M ||g(x
2
|L| 2
ε ε
ε1 +
ε2 ≤ + = ε
| |M
| |M | |M
2 2
.2נוכיח בהמשך בקלות בעזרת סדרות.
משפט 4.9אם fפונקציה אלמנטרית ו־ aבתחום ההגדרה של ,fאז:
)limf (x) = f (a
x→a
הערה :ההוכחה נובעת מאריתמטיקה והוכחה לפי הגדרה של מקרים מיוחדים .8
8למשל ,ברור כי x −→ aומאריתמטיקה ,לכל פולינום ) P (xמתקיים )lim x = P (a
x→a
x→a
27
.lim P (x) = P
x→a
Dr. Rabayev Daniel
4.4
4.4
גבולות מוכללים )גבול במובן הרחב(
גבולות מוכללים )גבול במובן הרחב(
הגדרה ) 4.10גבול סופי באינסוף( תהא fמוגדרת בקרן )∞ .(a,נאמר כי הגבול באינסוף קיים ושווה ל־ Lאם:
∀ε > 0, ∃N > a, ∀x > N, |f (x) − L| < ε
מסמנים
lim f (x) = L
∞→x
באופן אנלוגי עבור ∞.−
משפט 4.11כל כללי האריתמטיקה של גבולות נכונים גם לגבולות באינסוף.
דוגמאות:
.1נוכיח כי lim x1 = 0באופן ישיר:
∞→x
1
1
1
1
=ε
< = ∀ε > 0, ∃N = , ∀x > N, − 0
ε
x
x
N
lim x+41בעזרת אריתמטיקה של גבולות:
.2נוכיח כי = 1
x
∞→x
1 + 41
1+0
x + 41
x
=
→−
=1
x
1 x→∞ 1
הגדרה ) 4.12גבול אינסופי בנקודה( תהא fמוגדרת בסביבה מנוקבת של .aנאמר כי הגבול ב־ aקיים ושווה ל־∞
אם:
∀M > 0, ∃δ > 0, ∀x, |0 < |x − a| < δ, f (x) > M
מסמנים:
∞ = )limf (x
x→a
באופן אנלוגי עבור ∞.−
28
Dr. Rabayev Daniel
4.4
גבולות מוכללים )גבול במובן הרחב(
משפט 4.13כללי האריתמטיקה של גבולות נכונים גם לגבולות באינסוף .9
הערות:
.1אם יש מנה בה המונה שואף לקבוע שונה מאפס והמכנה שואף לאפס )מאותו הכיוון ,כלומר המכנה בעל
1
כאשר 10
סימן קבוע( ,אז המנה שואפת ל∞ או ∞ −בהתאמה .בה"כ ,אפשר להניח כי מדובר ב־
)f (x
.f (x) −→ 0+מהגדרת הגבול:
∀ε > 0, ∃δ > 0, ∀x, 0 < |x − a| < δ, f (x) − 0 = |f (x) − 0| < ε
לכן ,לכל ,M > 0נבחר
1
M
1
M
< εונקבל:
= ∃δ > 0, ∀x, 0 < |x − a| < δ, f (x) − 0 = |f (x) − 0| < ε
m
∃δ > 0, ∀x, 0 < |x − a| < δ, f (x) > M
.2קיימים ביטויים אשר עליהם לא חלים כללי האריתמטיקה:
∞· ∞, ∞ − ∞, 00 , ∞0 , 1
∞
,0
∞
דוגמאות:
.1
∞ = lim x12
x→0
1
|)lim |tan(x
∞=
x→0
.2עבור:
1
x2
= ) ,f (x) = g(xמתקיים:
∞ = )limf (x
x→0
∞ = )limg(x
x→0
ואם נחסר:
limf (x) − g(x) = lim0 = 0
x→0
x→0
9פרט למקרים הרשומים בהערה.
10נסמן ב־ 0+שאיפה לאפס בסימן חיובי.
29
(גבולות מוכללים )גבול במובן הרחב
Dr. Rabayev Daniel
4.4
: מתקיים,f (x) = x2 , g(x) = x :אבל עבור
lim f (x) = ∞
x→∞
lim g(x) = ∞
x→∞
:נחסר
lim f (x) − g(x) = lim x2 − x = ∞
x→∞
x→∞
: מתקיים,f (x) = x1 , g(x) = x עבור.3
lim f (x) = 0
x→∞
lim g(x) = ∞
x→∞
:ואם נכפול
lim f (x)g(x) = lim 1 = 1
x→∞
x→∞
: מתקיים,f (x) =
1
,
x2
g(x) = x אבל עבור
lim f (x) = 0
x→∞
lim g(x) = ∞
x→∞
:ואם נכפול
lim f (x)g(x) = lim x1 = 0
x→∞
x→∞
: תלוי במקדמים המובילים, נבחין כי הגבול הבא.4
3x3 + x + 1
=
x→∞ 9x3 + x2 + 11x − 15
3 + x12 + x13
lim
=
x→∞ 9 + 1 + 112 − 153
x
x
x
3+0+0
=
9+0+0−0
lim
30
1
3
Dr. Rabayev Daniel
4.5
אי־קיום הגבול
הערה :באופן דומה לשני המקרים הקודמים ,מגדירים גבול אינסופי באינסוף באופן הבא :תהא fמוגדרת בקרן
)∞ .(a,נאמר כי הגבול ב־∞ קיים ושווה ל־∞ אם:
∀M > 0, ∃N > 0, ∀x, x < N, f (x) > M
מסמנים:
∞ = )lim f (x
∞→x
באופן אנלוגי עבור ∞.−
אי־קיום הגבול
4.5
בכדי להוכיח כי הגבול של פונקציה לא קיים בנקודה ניתן להשתמש באחת מהשיטות הבאות:
• להוכיח את השלילה הלוגית של הגדרת הגבול:
∀ε > 0, ∃δ > 0, ∀x, 0 < |x − a| < δ, |f (x) − L| < ε
m
∃ε > 0, ∀δ > 0, ∃x, 0 < |x − a| < δ, |f (x) − L| ≥ ε
• להניח כי הגבול קיים ולהגיע לסתירה.
דוגמאות:
.1לפונקציית דיריכלה:
x∈Q
1
∈x
/Q
0
= )D(x
אין גבול באף נקודה.
.2לפונקציה ) sin( x1אין גבול באפס.
4.6
גבולות חד־צדדיים
הגדרה 4.14תהי fמוגדרת בקטע ) .(a, bנאמר כי Lהוא הגבול משמאל ב־ bאם:
∀ε > 0, ∃δ > 0, ∀x, b − δ < x < b, |f (x) − L| < ε
31
Dr. Rabayev Daniel
4.6
גבולות חד־צדדיים
ומסמנים
lim f (x) = L
x→b−
באופן דומה מגדירים
lim f (x) = M
x→a+
√
דוגמה :מתקיים , lim+ x = 0ואכן:
x→0
√
√
x< δ=ε
= |∀ε > 0, ∃δ = ε2 , ∀x, 0 < x < δ, |f (x) − 0
טענה 4.15תהא fפונקציה המוגדרת בסביבה מנוקבת של .aאז:
lim f (x) = L
x→a+
⇒⇐ limf (x) = L
x→a
lim f (x) = L
−
x→a
הערות:
.1מסקנה ישירה היא :ל־ fאין גבול ב־ aאם ורק אם הגבולות החד צדדיים שונים או שאחד מהם לא קיים.
.2מכלילים גבול חד־צדדי גם במובן הרחב.
.3כל כללי האריתמטיקה של גבולות נכונים גם לגבולות חד־צדדיים.
הוכחה :⇒ :אם הגבול קיים אז ברור שגם הגבולות החד־צדייים קיימים ושווים.
⇐ :ניקח ε > 0ןמהגדרת הגבול:
∃δ1 > 0, ∀x, a < x < a + δ1 , |f (x) − L| < ε
∃δ2 > 0, ∀x, a − δ2 < x < a, |f (x) − L| < ε
נבחר } δ = min {δ1 , δ2ונקבל את הגדרת הגבול.
דוגמאות:
32
Dr. Rabayev Daniel
4.7
המשך תכונות של גבולות
.1לכל a ∈ Zהגבול ] lim[xלא קיים .אכן lim+ [x] = [a] ,ואילו . lim− [x] = [a] − 1כיוון שלכל מספר ממשי
x→a
x→a
x→a
] [a] − 1 6= [aנקבל מהמשפט כי הגבול לא קיים.
.2נגדיר:
x≥0
x
x<0
)sin(x
= )f (x
אז:
lim f (x) = lim+ x = 0
x→0+
x→0
⇐ limf (x) = 0
lim f (x) = lim sin(x) = 0
−
−
x→0
x→0
x→0
.3
∞=
1
lim
x→0+ x
∞= −
1
lim
x→0− x
ולכן הגבול באפס לא קיים.
, lim− [x] = −1 , lim+ [x] = 0 .4לכן הגבול באפס לא קיים .באופן דומה לכל ערך שלם.
x→0
x→0
4.7
המשך תכונות של גבולות
טענה 4.16תהא fמוגדרת ואי־שלילית בסביבה מנוקבת של נקודה .aאם
limf (x) = L
x→a
אז .L ≥ 0
הוכחה :נניח בשלילה כי .L < 0מהגדרת הגבול:
∀ε > 0, ∃δ > 0, ∀x, 0 < |x − a| < δ, |f (x) − L| < ε
33
Dr. Rabayev Daniel
4.7
המשך תכונות של גבולות
בפרט עבור ε = −L > 0נקבל כי קיימת δ > 0כך שלכל ,xאם 0 < |x − a| < δאז:
|f (x) − L| < ε = −L
m
L < f (x) − L < −L
m
2L < f (x) < 0
וזאת סתירה.
הערות:
.1באופן אנלוגי עבור פונקציה לא חיובית.
.2אם נדרוש f (x) > 0עדיין לא נוכל להבטיח .L > 0לדוגמה ,עבור:
2
x 6= 0
x
= )f (x
1
x=0
הגבול באפס הוא אפס.
מסקנה 4.17
.1תהיינה f, gמוגדרות בסביבה מנוקבת של נקודה aהמקיימות ) .f (x) ≥ g(xאם:
limf (x) = L
x→a
limg(x) = M
x→a
אז .L ≥ M
.2יחידות הגבול.
הוכחה:
.1מגדירים h = f − gומפעילים את המשפט.
.2נניח כי limf (x) = Lוגם .limf (x) = Mבבירור ) f (x) ≤ f (xולכן מהמסקנה הראשונה ,L ≤ M
x→a
x→a
באופן סימטרי M ≤ Lוסיימנו.
טענה 4.18תהיינה f, gעבורן:
limf (x) = L
x→a
limg(x) = M
x→a
אם L > Mאז קיימת סביבה מנוקבת של aבה .f > g
34
Dr. Rabayev Daniel
4.7
הוכחה :נפעיל את הגדרת הגבול עבור
L−M
2
L−M
2
L−M
2
המשך תכונות של גבולות
= :ε
< |∃δ1 > 0, ∀x, 0 < |x − a| < δ1 , |f (x) − L
< | ∃δ2 > 0, ∀x, 0 < |x − a| < δ2 , |g(x) − M
כלומר:
3L−M
2
L+M
< 2
< )< f (x
∃δ1 > 0, ∀x, 0 < |x − a| < δ1 , L+M
2
∃δ2 > 0, ∀x, 0 < |x − a| < δ2 , −L+M
)< g(x
2
מכאן ,עבור } :δ = min{δ1 , δ2
)< f (x
L+M
2
< )∀x, 0 < |x − a| < δ, g(x
וסיימנו.
משפט ) 4.19סנדוויץ( תהיינה f, g, hמוגדרות בסביבה מנוקבת של נקודה aומקיימות שם ).f (x) ≤ g(x) ≤ h(x
אז ,אם:
limf (x) = L
x→a
limh(x) = L
x→a
אז:
limg(x) = L
x→a
הערה :המשפט נכון גם עבור גבולות מוכללים ו/או חד־צדדיים.
הוכחה :מהגדרת הגבול ,לכל :ε > 0
∃δ1 > 0, ∀x, 0 < |x − a| < δ1 , |f (x) − L| < ε
∃δ2 > 0, ∀x, 0 < |x − a| < δ2 , |h(x) − L| < ε
נסמן } ,δ = min{δ1 , δ2ואז לכל xהמקיים :0 < |x − a| < δ
L − ε < h(x) < L + ε
L − ε < f (x) < L + ε
מההנחה L − ε < f (x) ≤ g(x) ≤ h(x) < L + εולכן .|g(x) − L| < ε
דוגמאות:
35
Dr. Rabayev Daniel
4.7
המשך תכונות של גבולות
.1נראה כי:
lim sin(x) = 0
x→0+
נראה מייד כי לכל
π
2
< 0 < xמתקיים sin(x) < xואז נקבל:
0 < sin(x) < x
ומכלל הסנדויץ בגרסה החד־צדדית ,סיימנו.
טענת עזר :לכל 0 < α < π2מתקיים ).sin(α) < α < tan(α
הוכחה :נתבונן במעגל היחידה:
נבחין כי 0 < α < π2ונסמן ב־ SAOC , SBOCאת שטח המשולשים BOC, AOCוב־ Sאת שטח הגיזרה
.AOCבבירור:
SAOC < S < SBOC
כידוע:
1
)sin(α
=
2
2
1
)tan(α
= · )SBOC = 1 · tan(α
2
2
π(1)2
α
= S
=α
2π
2
· )SAOC = 1 · sin(α
ונקבל:
)sin(α) < α < tan(α
36
Dr. Rabayev Daniel
4.7
המשך תכונות של גבולות
הערה :באופן דומה מראים כי לכל − π2 < α < 0מתקיים ) .tan(α) < α < sin(αסה"כ מקבלים לכל
:|α| < π2
|)|sin(α)| ≤ |α| ≤ |tan(α
.2נראה כי:
=1
)lim sin(x
x
x→0
ניקח
π
2
< 0 < xונבחין כי:
)0 < sin(x) < x < tan(x
m
1
)sin(x
<
1
x
1
)tan(x
<
⇓
=1
)sin(x
)sin(x
<
)sin(x
x
<
)sin(x
)tan(x
ומכלל הסנדוויץ ,נקבל:
)lim+ sin(x
=1
x
x→0
באופן דומה נקבל:
)lim− sin(x
=1
x
x→0
טענה 4.20יהיו f, gמוגדרות בסביבה מנוקבת של נקודה .aאם:
limf (x) = 0
x→a
ו־ gחסומה בסביבת aאז:
limf (x) · g(x) = 0
x→a
37
= )cos(x
Dr. Rabayev Daniel
4.7
המשך תכונות של גבולות
הוכחה g :חסומה ולכן קיימת סביבה מנוקבת ,I ,של ,aבה מתקיים:
∃M > 0, ∀x ∈ I, |g(x)| < M
ולכן:
|)∃M > 0, ∀x ∈ I, |g(x) · f (x)| < M · |f (x
נקבל כי בסביבה Iמתקיים:
|)−M · |f (x)| < g(x) · f (x) < M · |f (x
מאריתמטיקה:
limf (x) = 0 ⇒ limM · f (x) = M · limf (x) = 0
x→a
x→a
x→a
ולכן ,מכלל הסנדוויץ ,סיימנו.
דוגמה:
=0
)lim sin(x
x
∞→x
בבירור
=0
lim 1
x→∞ x
∀x ∈ R, |sin(x)| ≤ 1
ומהטענה ,סיימנו.
משפט 4.21תהא fמונוטונית וחסומה בסביבה )מנוקבת( חד צדדית של נקודה ,aאז הגבול החד־צדדי ב־ aקיים.
הוכחה :נניח בה"כ כי fעולה בסביבה ימנית של ,aאשר נסמנה ב־ .Iנסמן:
}A = {f (x)| x ∈ I
לפי הנתון Aחסומה מלרע ולכן יש ל־ Aאינפימום .נראה כי:
lim f (x) = inf (A) = m
x→a+
38
Dr. Rabayev Daniel
לכל ,ε > 0רוצים למצוא δ > 0כל שלכל a < x < a + δמתקיים:
|f (x) − m| < ε
m
m − ε < f (x) < m + ε
נבחין כי m + εגדול מהאינפימום ולכן לא חסם מלרע ⇐ קיים a < b ∈ Iעבורו .f (b) < m + εממונוטוניות:
∀x ∈ (a, b), f (x) < f (b) < m + ε
אנחנו כבר יודעים כי לכל f (x) ≥ m > m − ε ,x ∈ Iונקבל:
∀x ∈ (a, b), m − ε < f (x) < m + ε
כלומר δ = b − a > 0 ,וסיימנו.
הערה :אם fמונוטונית ולא חסומה אז הגבול קיים במובן הרחב .לפיכך ,נסיק כי אם fמונוטונית בקטע Iאז
הגבולות החד־צדדיים קיימים בכל נקודה פנימית ב־ Iובמובן הרחב בקצוות.
5
סדרות
הגדרה 5.1סדרה היא אוסף אינסופי מסודר של מספרים ממשיים .מסמנים:
∞} {an | n ∈ N} = {an
n=1 = {an }n∈N
הערה :סדרה היא למעשה פונקציה עם תחום הגדרה Nוטווח ,Rכאשר יש חשיבות לסדר של המספרים הטבעיים.
למשל ,הפונקציה:
f :N→R
√
f (n) = n
מגדירה סדרה:
∞ √
∞
∞}){f (n
n=1 = {an }n=1 = { n}n=1
אופן הגדרת סדרה:
39
Dr. Rabayev Daniel
5.1
הגדרת הגבול
.1נוסחה מפורשת .למשל:
∞} ⇔ { n1
n=1
1
n
= ∀n ∈ N, an
∞})∀n ∈ N, bn = arctan(n) ⇔ {arctan(n
n=1
.2כלל לפיו בוחרים את אברי הסדרה .למשל:
)א( כלל מילולי ,למשל} :האיבר ה־ nאחרי הנקודה בפיתוח העשרוני של .an = {π
)ב( נוסחת נסיגה ,למשל מספרי פיבונאצ'י:
a1 = a2 = 1
∀n ≥ 3, an = an−1 + an−2
5.1
הגדרת הגבול
∞} {anמתכנסת )שואפת( לגבול aונסמן lim an = aאו , an → aאם:
הגדרה 5.2נאמר כי סדרה n=1
∞→n
∞→n
∀ε > 0, ∃N ∈ N, ∀n > N, |an − a| < ε
אם לסדרה לא קיים הגבול ,נאמר כי הסדרה מתבדרת.
הערות:
.1נבחין כי שינוי של מספר סופי של אברי הסדרה ,לא משפיע על ההתכנסות או על ערך הגבול.
.2כאשר נרצה להוכיח לפי הגדרה ,נשתמש לא מעט בערך השלם לבחירת .Nחשוב לזכור את התכונה:
x ≤ [x] < x + 1
.3לסדרה השואפת לאפס קוראים גם סדרה אפסה.
דוגמאות:
.1הסדרה
∞ 1
n=1
n
שואפת לאפס .אכן:
<ε
1
N
<
1
n
= + 1, ∀n > N, n1 − 0
40
1
ε
= ∀ε > 0, ∃N
Dr. Rabayev Daniel
.2הסדרה
∞ 9n−1
n=1
3n
5.2
תכונות בסיסיות ואריתמטיקה
שואפת לשלוש .נתחיל בחישוב עזר:
9n − 1
1
1
1
1
<
< ε
) 3n − 3 = − 3n = 3n < n (i
)N (ii
)(iמניחיןם כי .n > N
)(iiנבחר Nכך שדרישה זו תתקיים.
לפיכך:
< ε
)(ii
1
N
+ 1, ∀n > N, 9n−1
< − 3
3n
)(i
1
ε
= ∀ε > 0, ∃N
)(iחישוב עזר.
)(iiבחירת .N
∞} {anמתכנסת )שואפת( לאינסוף ונסמן ∞ = lim anאו ∞ → , anאם:
הגדרה 5.3נאמר כי סדרה n=1
∞→n
∞→n
∀M ∈ R, ∃N ∈ N, ∀n > N, an > M
ובאופן דומה עבור ∞ .−אומרים גם כי קיים הגבול במובן הרחב.
דוגמה an = n :מתכנסת לאינסוף .אכן:
∀M ∈ R, ∃N = [M ] + 1, ∀n > N, an = n > N > M
5.2
תכונות בסיסיות ואריתמטיקה
נתחיל בטענה שימושית אשר עוזרת באינטואיציה וכן בהוכחות.
∞} {anמתכנסת לגבול aאם ורק אם כל סביבה Iשל aמכילה את כל אברי הסדרה ,פרט
טענה 5.4סדרה n=1
אולי למספר סופי.
הערה :אומרים כי תכונה מסויימת מתקיימת כמעט לכל nאם היא מתקיימת לכל anפרט אולי למספר סופי של
איברים ,או באופן שקול ,החל ממקום מסויים .לפיכך ,ניתן לומר כי כל סביבה של הגבול מכילה את כמעט כל
אברי הסדרה.
הוכחה :בלי הגבלת הכלליות ,ניתן להוכיח עבור סביבת־ εשל .a
⇐ נניח כי lim an = aויהא .ε > 0מהגדרת הגבול:
∞→n
∀ε > 0, ∃N ∈ N, ∀n > N, |an − a| < ε
41
5.2
Dr. Rabayev Daniel
תכונות בסיסיות ואריתמטיקה
.{ai }N
לכן בסביבה ) (a − ε, a + εנמצאים כל אברי הסדרה פרט אולי ל־ i=1
.{ai }Nלכן:
⇒ יהא .ε > 0מההנחה ,בסביבת־ εשל aנמצאים כל אברי הסדרה ,פרט אולי ל־ i=1
)∀n > N, an ∈ (a − ε, a + ε
m
∀n > N ⇒ |an − a| < ε
וסיימנו.
הטענות הבאות אנלוגיות לטענות בפונקציות ולכן לא נתעכב על ההוכחה .אפשר כתרגול עצמי להוכיח את
התכונות.
∞} {anסדרה המתכנסת לגבול .a
משפט 5.5תהא n=1
.1הגבול aהוא יחיד.
.2הסדרה חסומה.
הערה :בדומה לפונקציות ,אפשר להוכיח ישירות מההגדרה עם זאת ,ניתן בקלות להוכיח בעזרת טענה .5.4
∞
∞}| {|anסדרה המתכנסת לגבול |.|a
משפט 5.6תהא {an }n=1סדרה המתכנסת לגבול ,aאז n=1
הערה :ההיפך לא נכון ,למשל .an = (−1)n :עם זאת ,אם a = 0אז גם ההיפך נכון.
∞
∞} {bnסדרות המתכנסות לגבולות b, aבהתאם ,אז
משפט ) 5.7אריתמטיקה של גבולות (.אם {an }n=1ו־ n=1
הגבולות הבאים קיימים:
.∀α ∈ R, lim α · an = αa .1
∞→n
. lim (an ± bn ) = a ± b .2
∞→n
. lim (an · bn ) = a · b .3
∞→n
.4אם ,b 6= 0אז
a
b
= ) . lim ( abnn
∞→n
.5אם ∞ = a, bאז ∞ = ) . lim (an + bn
∞→n
.6אם ∞ = aאז . lim ( a1n ) = 0
∞→n
∞} {anחיובית כמעט לכל nאז ∞ = ) . lim ( a1n
.7אם a = 0וגם n=1
∞→n
הערות:
.1כמו בפונקציות ,יש להשתמש באריתמטיקה בכיוון הנכון.
.2בגבול במובן הרחב התכונות עבור ∞ −נכונות בהתאמה.
42
Dr. Rabayev Daniel
5.2
תכונות בסיסיות ואריתמטיקה
.3קיימים ביטויים אשר עליהם לא חלים כללי האריתמטיקה:
∞· ∞, ∞ − ∞, 00 , ∞0 , 1
∞ 0
, ,0
∞ 0
דוגמה :נחשב את הגבול הבא:
1
1+0−0
=
3−0
3
=
∞→n
1 + n1 − n12
n2 + n − 1
=
3n2 − 1
3 − n12
∞
∞} {anסדרות המתכנסות לגבולות a, bבהתאמה .אז:
טענה 5.8נניח כי n=1 , {bn }n=1
.1אם a < bאז:
∃N ∈ N, ∀n > N, an < bb
.2אם כמעט לכל nמתקיים an ≤ bnאז .a ≤ b
הערות:
.1אם ב־ .1מניחים "רק" ,a ≤ bאז הטענה לא נכונה .למשל
an = 0
(−1)n
n
= bn
.2אם ב־ .2מניחים כי כמעט לכל nמתקיים an < bnאז עדיין מתקיים "רק" ,a ≤ bלמשל:
an = 0
1
n
= bn
∞
∞
∞} {anסדרות .אם מתקיים:
משפט ) 5.9כלל הסנדווויץ( נניח כי n=1 , {bn }n=1 , {cn }n=1
.1מתקיים an ≤ bn ≤ cnכמעט לכל .n
∞
∞} {anמתכנסות לאותו הגבול .L
n=1 , {cn }n=1 .2
אז גם } {bnמתכנסת לגבול .L
43
5.3
Dr. Rabayev Daniel
סדרות מונוטוניות
∞} {anשואפת ל־∞ אז גם
הערה :הכלל נכון גם במובן הרחב ,כלומר אם an ≤ bnכמעט לכל nוידוע כי n=1
∞} {bnשואפת ל־∞.
n=1
דוגמאות:
√
√
√
.1נוכיח כי . lim n n = 1ברור כי לכל n > 1מתקיים n n > 1ולכן ניתן לרשום . n n = 1 + hnנבחין כי
∞→n
לכל :n > 1
!
!
n
X
n (n − 1) 2
n
n
n
i
= ) n = (1 + hn
> hn
= h2n
hn
)(i
2
)(i
i
2
i=1
) (iנוסחת הבינום.
) (iiברור hn > 0לכל .n
q
2
0 < hn < n−1כמעט לכל .nהואיל
מכאן נסיק כי
והסדרות 11
∞o
n=1
2
n−1
nq
∞} {hnשואפת לאפס ומאריתמטיקה נקבל כי n = 1
מכלל הסנדוויץ נקבל כי n=1
√
n
.2נוכיח כי לכל a > 0מתקיים a = 1
√
n
,
∞}{0
n=1
שואפות לאפס,
. lim
∞→n
. limנפריד לשני מקרים:
∞→n
)א( :a ≥ 1ממונוטוניות השורש ,לכל n > aמתקיים:
√
√
1<na< nn
√
שני האגפים שואפים ל־ 1ולכן מכלל הסנדוויץ נובע כי . lim n a = 1
∞→n
q
)ב( :0 < a < 1אז a1 > 1ולפי המקרה הקודם נקבל כי . lim n a1 = 1אך ברור כי
∞→n
ומאריתמטיקה נקבל את הנדרש.
5.3
סדרות מונוטוניות
∞} {anהיא מונוטונית עולה אם:
הגדרה 5.10נאמר כי סדרה n=1
∀n ∈ N,an ≤ an+1
נאמר כי הסדרה מונוטונית עולה ממש אם:
∀n ∈ N,an < an+1
באופן אנלוגי ,יורדת/יורדת ממש.
נצטט משפט חשוב אשר נוגע לסדרות מונוטוניות:
11יש לפרט.
44
√
1
n
√ = a
n 1
a
5.3
Dr. Rabayev Daniel
סדרות מונוטוניות
משפט 5.11סדרה מונוטונית תמיד מתכנסת במובן הרחב ,בפרט:
.1אם הסדרה חסומה אז היא מתכנסת לגבול סופי.
.2אם הסדרה לא חסומה אז היא מתכנסת ל־∞ אם היא עולה ול־∞ −אם היא יורדת.
הערות:
.1אם הסדרה עולה אז היא מתכנסת לסופרימום שלה ואם היא יורדת לאינפימום.
.2במקרים רבים נוכל להוכיח התכנסות של סדרה ע"י המשפט ללא יכולת לחשב את הגבול עצמו.
∞ n
.3ע"י חישוב ישיר )וארוך( מראים כי הסדרה
1 + n1מונוטונית עולה וחסומה ,לפיכך ,מהמשפט היא
n=1
∼
מתכנסת .את גבול הסדרה מסמנים ב־ .e = 2.71מכללי האריתמטיקה והרכבה נובע כי לכל x ∈ Rמתקיים
n
lim 1 + nx = ex
∞→n
דוגמאות:
∞ Pn 1
.קל לראות כי הסדרה עולה ממש ,פחות קל לראות כי היא חסומה:
.1נביט בסדרה i=1 i2 n=1
n
n
n
n
X
X
X
X
1
1
1
1
1
1
=
1
+
≤
1
+
=
1
+
−
=
1
+
1
−
= 2
≤1
i2
i2
)i (i − 1
)i − 1 i (i
)n (ii
i=2
i=2
i=2
i=1
) (iזהו "סכום טלסקופי" ,כלומר ,מרבית אברי הסכום מצטמצמים.
)(iהרי nטבעי ןבפרט חיובי.
לכן ,לפי המשפט הסדרה מתכנסת .12
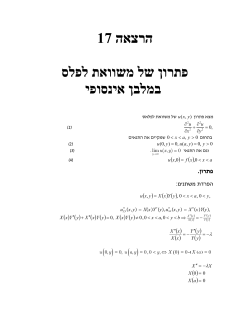
.2נוכיח קיום ונחשב את הגבול של הסדרה הבאה:
a =2
1
∀n ∈ N, an+1 = √2an − 1
)א( מונוטוניות :הסדרה יורדת ,נוכיח באינדוקציה על :n
.iבסיס האינדוקציה :עבור n = 1מתקיים:
√
√
√
√
4 > 3 = 2 · 2 − 1 = 2a1 − 1 = a2
2
12למעשה ,גבול הסדרה הוא . π6
45
= a1 =2
5.4
Dr. Rabayev Daniel
תת־סדרות
.iiשלב האינדוקציה :נניח נכונות ל־ nונוכיח עבור :n + 1
p
√
= 2an+1 − 1 ≥ 2an − 1 = an+1
an+2
)∗(
)∗( הנחת האינדוקציה ומונוטוניות השורש.
)ב( חסימות :הסדרה יורדת ולכן חסומה מלעיל ע"י .a1 = 2כמו כן ,הסדרה בבירור חיובית ולכן חסומה
מלרע ע"י .0
מהמשפט ,הסדרה מתכנסת לגבול .Lמהגדרת הסדרה ,לכל nמתקיים ,a2n+1 = 2an − 1לפיכך ,מיחידות
הגבול ואריתמטיקה נובע כי .L2 = 2L − 1הפתרון היחיד של המשוואה הוא L = 1וקיבלנו כי הסדרה
מתכנסת ל־.1
5.4
תת־סדרות
∞
∞} {ankכאשר n1 < n2 < ...סדרה עןלה ממש
הגדרה 5.12תת־סדרה של סדרה נתונה {an }n=1היא סדרה k=1
של מספרים טבעיים.
דוגמאות:
∞
∞} {a2kותת־הסדרה של
.1לכל סדרה {an }n=1ניתן לקחת את תת־הסדרה של האינדקסים הזוגיים k=1
∞} .{a2k−1
האינדקסים האי־זוגיים k=1
∞
2
∞}.{n
.2הסדרה {n }n=1היא תת־סדרה של n=1
הגדרה 5.13אם תת־סדרה של סדרה מתכנסת אז הגבול נקרא גבול חלקי של הסדרה.
∞
n
∞} {1ולכן
דוגמה :תהא הסדקה .{(−1) }n=1אז תת־הסדרה עם האינדקסים הזוגיים היא הסדרה הקבועה n=1
∞} {−1ולכן מתכנסת ל־ .−1נסיק כי 1, −1
מתכנסת ל־ 1ואילו תת־הסדרה של האינדקסים האי־זוגיים היא n=1
הם גבולות חלקיים של הסדרה.
ברור כי אם סדרה מתכנסת אז כל תת־סדרה שלה גם מתכנסת ולאותו הגבול ,למעשה ,יש כאן אפיון:
∞} {anמתכנסת לגבול Lאם ורק אם כל תת סדרה שלה מתכנסת ל־.L
טענה 5.14סדרה n=1
הערות:
.1המשפט נכון גם במובן הרחב.
.2מסקנה חשובה היא שאם יש לפחות שתי תת־סדרות המתכנסות לגבולות שונים אז הסדרה לא מתכנסת.
√
√
∞
∞ √
n
n
דוגמה :הואילו־ 5 5n n=1תת־סדרה של , { n n}n=1מהמשפט ,מתקיים כי . lim 5 5n = 1 13
∞→n
תכונה שימושית נוספת היא העובדה שבכל סביבה של גבול חלקי יש אינסוף 14מאברי הסדרה .אכן ,אם תת־
הסדרה מתכנסת אז כל סביבה של הגבול מכילה את כמעט כל אברי תת־הסדרה אך כמעט כל אברי תת־הסדרה
הם אינסוף מאברי הסדרה.
לבסוף ,תכונה חשובה היא שלכל סדרה חסומה יש תת־סדרה מתכנסת:
√
13כזכור ,ראינו כי lim n n = 1
∞→n
14נא לא להתבלבל ,יש הבדל גדול בין אינסוף מאברי הסדרה וכמעט כל אברי הסדרה.
46
5.5
Dr. Rabayev Daniel
משפט היינה ־ הקשר בין סדרות לפונקציות
משפט ) 5.15בולצאנו ויירשטראס( לכל סדרה חסומה יש תת־סדרה מתכנסת .יתרה מזאת ,לכל סדרה יש תת־
סדרה המתכנסת במובן הרחב.
5.5
משפט היינה ־ הקשר בין סדרות לפונקציות
נחזור לפונקציות limf (x) = L ,אומר שאם " xקרוב" ל־ aאז ערך הפונקציה ב־" xקרוב" ל־ .Lבפרט ,אם ניקח
x→a
סדרת ערכים של xאשר "מתקרבים" ל־ aנקבל סדרת ערכים של התמונה אשר "מתקרבים" ל־ .Lבכיוון השני,
השאלה היא :האם מכך שידוע כי לכל סדרת ערכים אשר "מתקרבים" ל־ aגם סדרת הערכים המתאימים בתמונה
"מתקרבים" ל־ Lנובע ?limf (x) = Lהתשובה היא שכן:
x→a
∞} {an
משפט ) 5.16היינה( תהא fמוגדרת בסביבה מנוקבת של ,aאז limf (x) = Lאם ורק אם לכל סדרה n=1
x→a
המתכנסת ל־ aושאבריה שונים מ־ aמתקיים .f (an ) −→ L
∞→n
הערות:
.1המשפט נכון גם עבור גבול במובן הרחב וגם עבור גבול חד־צדדי.
.2המשפט נותן כלי נוח להוכיח דווקא אי־קיום גבול של פונקציה ,כלומר ,מספיק למצוא סדרה המתכנסת ל־a
ושסדרת התמונות שלה לא מתכנסת ל־ Lאו לא מתכנסת כלל .גישה נוספת היא למצוא שתי סדרות שונות
המתכנסות ל־ aאך שסדרות התמונות מתכנסות לגבולות שונים.
דוגמה :נוכיח כי לפונקציה f (x) = sin x1אין גבול באפס .נביט בסדרות:
π
2
1
πn
= an
1
2πn +
= bn
הסדרות בבירור אפסות ומתקיים:
f (an ) =sin (πn) = 0
π
f (bn ) =sin 2πn +
=1
2
כלומר סדרת התמונות בשני המקרים היא סדרה קבועה ולכן מתכנסת ל־ 0, 1בהתאמה ,לכן ,מהיינה ,הגבול
limsin x1לא קיים.
x→0
6
6.1
פונקציות רציפות
הגדרה ותכונות בסיסיות
תהא fפונקציה המוגדרת בסביבת נקודה .aנאמר כי fרציפה בנקודה aאם גבול הפונקציה בנקודה קיים ושווה
ל־) .f (aבאופן מפורש:
∀ε > 0, ∃δ > 0, ∀x, |x − a| < δ, |f (x) − f (a)| < ε
הערות:
47
6.1
Dr. Rabayev Daniel
הגדרה ותכונות בסיסיות
.1אם הגבול קיים באופן חד־צדדי ושווה לערך הפונקציה נאמר כי הפונקציה רציפה מימין/שמאל.
.2רציפות היא תכונה נקודתית ולכן נאמר כי fרציפה בקטע אם היא רציפה בכל נקודה 15בקטע.
∞} {anהמתכנסת ל־ aמתקיים
.3השקילות של היינה f :רציפה בנקודה aאם ורק אם לכל סדרה n=1
).f (an ) −→ f (a
∞→n
.4ניתן להגדיר רציפות באופן שקול על־ידי .limf (x) = f limx
x→a
x→a
דוגמאות:
.1פונקציה לינארית היא רציפה ,למעשה מייד נראה כי כל הפולינומים רציפים.
.2הפונקציה ] [xרציפה בקטע ) [2, 3אך לא רציפה בנקודה .3
נסכם תכונות בסיסיות במשפט הבא:
משפט 6.1
) .1אריתמטיקה( סכום/מכפלה/מנה 16של פונקציות רציפות היא פונקציה רציפה.
.2אם fרציפה ב־ x0ו־ gמקיימת limg (t) = x0אז ) .limf ◦ g (t) = lim f (x) = f (x0
t→a
t→a
x→x0
.3כל הפונקציות האלמנטריות רציפות בתחום הגדרתן.
.4אם פונקציה fרציפה ומונוטונית ממש בקטע אז fהפיכה שם ו־ f −1גם כן רציפה ומונוטונית ממש.
.5אם פונקציה רציפה וחיובית בנקודה אז קיימת סבנבה של הנקודה בה הפונקציה חיובית.
הערה :בהינתן fחיובית ו־ gנגדיר )) .f (x)g(x) = eg(x)ln(f (xכמובן שהפונקציה המעריכית והלוגריתמית רציפות
בתחום הגדרתן וכמקרה פרטי חשוב של ההרכבה נקבל כי אם limf (x) = L > 0ו־ limg (x) = Mאז
x→a
x→a
.lim (f (x))g(x) = LMמכללי האריתמטיקה ,אם בנוסף L 6= 1 17אז Mיכול להיות לא סופי.
x→a
הוכחה :רעיון ההוכחה הוא:
.1נובע ישירות מאריתמטיקה של גבולות.
.2עבור פולינומים/פונקציות רציונליות/פונקציות טריגונומטריות האענה נובעת מאריתמטיקה +רציפות של
פונקציה לינארית ו־ sin/cosשכבר ראינו .עבור הפונקציה המעריכית ,הגדרנו את eבאמצעות סדרות ולכן
הרציפות נובעת מאריתמטיקה של סדרות והאפיון של היינה.
.3לאור העובדה שמונוטוניות גורר חח"ע ,יש פונקציה הפוכה אחרי צמצום של התחום והטווח .לא נוכיח את
הרציפות אך ניזכר כי באופן גיאומטרי ,הגרף של f, f −1זהה .18המונוטוניות של הפונקציה ההפוכה ברורה .19
.4ישירות מהגדרת הרציפות ומסקנה .4.6
15אם הקטע סגול אז בנקודות הקצה מדובר על רציפות מימין/שמאל.
16כאשר המכנה שונה מאפס.
17במקרה בו L = 1ו־ Mאינסופי ,לא ניתן להשתמש ישירות באריתמטיקה.
18כאשר חושבים על f −1כפונקציה מציר ,Yאחרת הגרף הוא שיקוף של הגרף של fבישר .y = x
−1
−1
19הרי אם fעולה ממש אז x < yאם ורק אם y1 = f (x1 ) < f (x2 ) = y2ולכן אם y1 < y2אז .x1 = f (y1 ) < f (y2 ) = x2
48
6.2
מיון נקודות אי־רציפות
6.2
מיון נקודות אי־רציפות
Dr. Rabayev Daniel
נבדיל בין שלושה מצבים בהם פונקציה לא מקיימת את הגדרת הרציפות:
הגדרה 6.2תהא fמוגדרת בסביבה מנוקבת של aאז:
.1נאמר כי יש לפונקציה אי־רציפות סליקה אם הגבול בנקודה קיים אך הפונקציה לא מוגדרת בנקודה או
שהגבול שונה מערך הפונקציה בנקודה.
.2נאמר כי יש לפונקציה אי־רציפות קפיצה )סוג ראשון( אם הגבולות החד צדדיים קיימים אך שונים.
.3נאמר כי יש לפונקציה אי־רציפות עיקרית )סוג שני( אם אחד הגבולות החד־צדדיים לא קיים.
הערה :כמסקנה ישירה ממשפט
דוגמאות:
4.21
נקבל כי לפונקציה מונוטונית ייתכנו רק נקודות אי־רציפות מסוג קפיצה.
.1לפונקציה:
x 6= 0
x
x=0
1
= )f (x
יש אי־רציפות סליקה באפס.
.2לפונקציית הערך השלם יש אי־רציפות מסוג קפיצה בכל מספר שלם.
.3ראינו כי הגבול החד־צדדי באפס של פונקציות x1 , sin x1לא קיים ולכן יש לשתיהן אי־רציפות עיקרת
באפס.
49









© Copyright 2026