ABC
docz
Explore
Log in
Create new account
Download
Report
No category
PDEs1-FormulaSheet-v1.5
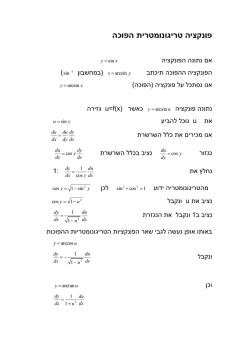
פונקציה טריגונומטרית הפוכה (אינו שייך לתוכנית הלימודים)
שאלון
אוניברסיטת בן־גוריון בנגב – המחלקה למתמטיקה חדו א להנדסת מכונות 201–1
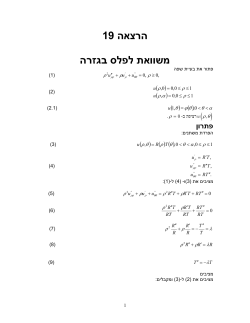
משוואת לפלס בגזרה
20152-2 חשבון אינפי `7. דף תרגילים מס באילוץ ומוחלט אקסטרמום פתרונות
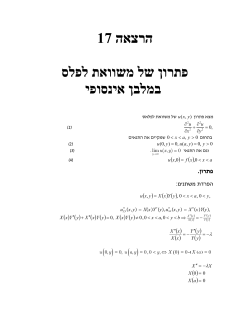
פתרון של משוואת לפלס
ארונות מתכת SD IP65
הצעת תשובה למשימה 4
.( כולל הצגה טריגונמטרית של מספרים מרוכבים ומישור גאוס ) תרגיל בנושאים
2 מבחן 807 - שאלון ( )0
בעיית ערכים ופונקציות עצמיות
© Copyright 2026
About abcdocz
DMCA / GDPR
Report