
! בהצלחה
הוצאת מימדים מבעיה:
משפט πשל בקינגהאם:
שיטת פיתרון בעזרת בקינגהאם:
לכל משתנה מימדי ,מחפשים
קומבינציה של פרמטרים שנותנת את
המימד שלו ,ובעזרת חלוקה מגדירים
משתנה חדש חסר-מימד .בעזרת כלל
השרשרת מציבים את המשתנים
החדשים לבעיה ולתנאי ההתחלה .רצוי
לבחור צירוף של פרמטרים מאותו סדר
גודל כמו המשתנה שאותו מנרמלים.
נניח שקיימת תלות פיסיקלית בין nגורמים
בעלי מימד ,מן הצורה
R1, …, Rn
רושמים את מטריצת המימדים ,ובוחרים עמודות
בת"ל שלא כוללות את המשתנה אותו רוצים לחלץ,
מוצאים את כל הגורמים חסרי המימד ,רושמים
ש"קיימת פונקציה Fכך ש," F (π1, …, πn −r ) = 0 -
ולבסוף "לפי נתוני הבעיה ולפי משפט בקינגהאם ניתן
לחלץ את πiמתוך המשוואה" ,ומקבלים
. φ (R1, …, Rn ) = 0אזי הביטוי הנ"ל שקול
לביטוי מן הצורה , F (π1, …, πn −r ) = 0כאשר
πiהם הגורמים חסרי המימד בבעיה ו r -זו
הדרגה של מטריצת המימדים.
שיטת פיתרון בעזרת אנליזת דמיות:
:O Notation
. lim f (x ) / g (x ) = M
לבעיה בעזרת כלל השרשרת ומוצאים תנאים על a, b, cכדי שהבעיה תהיה אינווריאנטית ל .scaling-אם נקבל שמבין שלושת הפרמטרים
x →x 0
האלה ,רק אחד הוא בלתי תלוי )למשל ( a = c 2 , b = cאזי נוכל לצמצם את מספר המשתנים ב . 1 -רושמים את משוואת האינווריאנטיות
ונאמר ש f (x ) = o (g (x ))x →x 0 -אם:
u (x , y ) = u (ax , by ) / cעבור אותם , a, b, cומגדירים באופן מלאכותי ) a = 1/ xאו ( b = 1/ yומקבלים שהבעיה תלויה רק ב) y -או
. lim f (x ) / g (x ) = 0
x →x 0
.( xנותנים למשתנה שנותר שם חדש ,ומציבים את ) u (x , yהחדשה למד"ח ,ומקבלים מד"ר עבור הפונקציה φבמשתנה היחיד החדש.
בעיות ערכים עצמיים:
עבור , (A + εB ) v = λvרושמים את הערך העצמי
והוקטור העצמי של המטריצה המופרעת בתור טור חזקות ב-
εומציבים למשוואה .משתמשים במשפט לפיו למשוואה
Mx = aקיים פיתרון לא טריוויאלי עבור xאם"ם
†
מתקיים ש . a ⊥ ker {M } -מתוך דרישה זו מקבלים את
המקדמים בפיתוח של הערך העצמי ,ופותרים את המשוואה
המטריצית על מנת למצוא את המקדמים בפיתוח של
הוקטור העצמי .תמיד נקבל דרגת חופש בבחירת המקדם
הנ"ל ,ותמיד נזהה את הוקטור העצמי המקורי של A
בפיתרון הנ"ל ,ולכן נתעלם ממנו.
מציאת שורשים – פיתוח כללי:
רושמים פיתוח אסימפטוטי כללי לפיתרון מהצורה
… x (ε) = x1δ1 (ε) + x 2δ2 (ε) +תחת הדרישה שיתקיים
… ≫ δ1 ≫ δ2וכמו כן x i = O (1) , x i ≠ 0לכל . i
מציבים למשוואה ,ומשאירים אותה מסודרת )כלומר ,לא
פותחים סוגרים ואוספים איברים( .מכל מקדם לוקחים את
האיבר מהסדר המוביל ,ומחפשים את כל הדרכים לקבוע את
δ1כך שנקבל שני איברים לפחות מאותו סדר גודל וכל
השאר קטנים יותר .בוחרים את , δ1מציבים ופותרים עבור
. x 1לאחר מכן לוקחים את כל האיברים הבאים מכל קבוצה,
שעדיין לא השתמשנו בהם )כלומר ,הם היו זניחים בפיתרון
הקודם שעשינו עבור ( x 1וחוזרים על התהליך.
פיתוח נפוץ:
עבור ) x = x 0 + x1ε + x 2 ε2 + O (ε 3מתקיים:
) x 2 = x 02 + 2x 0x 1ε + (x 12 + 2x 0x 2 ) ε2 + O (ε 3
) x 3 = x 03 + 3x 02x 1ε + (3x 0x 12 + 3x 02x 2 ) ε2 + O (ε 3
) x 4 = x 04 + 4x 03x 1ε + (6x 02x 12 + 4x 03x 2 ) ε2 + O (ε3
פיתרון בעיות רגולריות:
שיטת פואנקרה-לינדשטט:
מניחים שהפיתרון הוא טור חזקות ב, ε -
ומציבים למשוואה .במקרה הצורך ,מפתחים
גם את איברי המשוואה לטורי חזקות ב. ε -
לבסוף משווים מקדמים של חזקות זהות,
ומקבלים שורה של מד"רים ,שאת תנאי
ההתחלה שלהם מקבלים מתוך הצבת טור
הפיתרון לתנאי ההתחלה של הבעיה
המקורית.
עבור משוואה מ הצורה ) y ′′ + ω02y = ε f (y, y ′, tמגדירים משתנה
dx
= tan x + C
cos2 x
dx
= − cot x + C
sin2 x
dx
x
= ln tan + C
sin x
2
זמן חדש , τ = ωtכאשר ωהוא טור חזקות ב ε -עם איבר מוביל
. ω0מציבים את משתנה הזמן החדש בעזרת כלל השרשרת ומקבלים
בעיה חדשה עבור ) . u (τ ) = y (tבזמן הפיתרון מאפסים את
האיברים הסקולריים )אלה שגוררים פתרונות לא מחזוריים או לא
חסומים( בעזרת בחירה חכמה של מקדמי εבפיתוח של . ω
מציאת שורשים – שיטת איטרציות:
מציאת שורשים – :scaling
מגדירים לבעיה הנתונה משתנה חדש
x = εαyומציבים למשוואה .עוברים
על כל זוגות המקדמים ומחפשים את
ערכי αכאלה שעבורם שני מקדמים
הם מאותו סדר גודל ,וכל השאר מסדר
גודל קטן יותר – כל זאת בהנחה ש-
) . y = O (1בהחלט ייתכן גם ש-
α = 0מקיים את התנאי ,זה פשוט
אומר שיש למשוואה גם שורשים
רגולריים )שהם מסדר יחידה בעצמם(.
מתבוננים במשוואה וחושבים האם ייתן פיתרון ), x = O (1
. x ≪ 1 , x ≫ 1אם ) , x ≠ O (1מוצאים סדר הגודל הצפוי של הבעיה.
לכל מקרה בנפרד ,בונים פונקציה ) f (x, εמתאימה כך שx = f (x, ε) -
וכך ש f -תקיים את משפט נקודת השבת f ′ (x ) ≤ k -עבור . 0 < k < 1
ניתן ורצוי וצריך להשתמש בסדר הגודל שמצאנו עבור xבמציאת סדר
הגודל של הנגזרת .בוחרים נקודת התחלה )השורה המשוער של המשוואה(
ומבצעים איטרציות .את התיקון מעריכים בעזרת המשפט גם כן -
) . x − x n ≤ x1 − x 0 k n / (1 − k
הפרעות סינגולריות במד"ר – שכבות גבול:
הנחת היסוד :ידוע שיש לבעיה פיתרון יחיד .עבור הפיתרון החיצוני ,מחוץ לשכבת הגבול ,פותרים את הבעיה כבעיה רגולרית
לכל דבר ,ונעזרים בתנאי השפה שנמצא מחוץ לשכבת הגבול )במקרה של בעיית התחלה ,לפיתרון החיצוני בדרך כלל לא יהיו
תנאי התחלה( .עבור הפיתרון הפנימי ,מגדירים משתנה חדש ) , ξ = (x − a ) / δ (εכאשר שכבת הגבול נמצאת בx = a + -
)נהוג לבחור את ξשיהיה חיובי( .מציבים בעזרת כלל השרשרת ובוחרים את ) δ (εעל מנת לקבל בעיה רגולרית )שני
איברים לפחות מאותו סדר גודל ,כל השאר קטנים יותר( ,ופותרים תוך שימוש בתנאי השפה ששייך לשכבת הגבול )או בתנאי
ההתחלה( .לפחות באחד מהפתרונות יישאר קבוע ,שייקבע מתוך תפירת הפתרונות – רושמים את הפיתרון האסימפטוטי עד
לסדר nשל הפיתרון החיצוני כפונקציה של , ξומפתחים לטור ב ε -עד לסדר , mרושמים את הפיתרון האסימפטוטי עד
לסדר mשל הפיתרון הפנימי כפונקציה של , xומפתחים לטור ב ε -עד לסדר . nלבסוף משווים את שני הטורים )לפי
המקדמים של ,( εכאשר לוקחים בחשבון שניתן להזניח "איברים קטנים אקספוננציאלית" e −a / ε -עבור . a > 0איך
יודעים היכן שכבת הגבול? עבור בעיות מהצורה , εy ′′ + ay ′ + by = 0שכבת הגבול תהיה משמאל לתחום עבור a > 0
ומימין עבור . a < 0אם המקדם של y ′מחליף סימן ,שכבת הגבול תהיה בנקודת ההתאפסות )או שיש שתי שכבות גבול(.
אינטגרלים שכדאי לזכור:
זהויות טריגונומטריות:
∫
∫
∫
∫ ln xdx = x ln x − x + C
dx
1
x
= arctan + C
x2 + a2
a
a
dx
1
x −a
=
ln
+C
x 2 − a2
2a
x +a
dx
= ln x + x 2 ± a 2 + C
x2 ± a2
dx
x
= arcsin + C
a
a2 − x 2
∫
∫
∫
∫
טורי טיילור:
x2 x4
cos x = 1 −
+
…+
!2! 4
x3 x5
sin x = x −
+
…+
!3! 5
3
x
2x 5
tan x = x +
+
…+
3
15
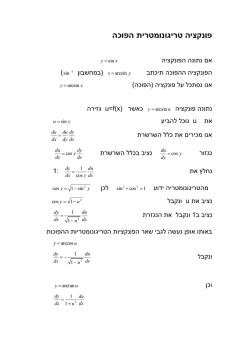
עבור )) : f (u (x
df
df du
=
dx
du dx
עפ"י בקינגהאם ,תופעה
פיסיקלית נשלטת על ידי
הגורמים חסרי המימד
שבה .לכן כל שתי בעיות
פיסיקליות יהיו שקולות,
אם ערכי הגורמים הנ"ל
יהיו זהים בשתיהן.
מגדירים משתנים חדשים x ′ = ax , y ′ = by, u ′ = cuעבור , a, b, c > 0כאשר ) . cu (x , y ) = cu (x ′ / a, y ′ / b ) = cu ′ (x ′, y ′מציבים
נאמר ש f (x ) = O (g (x ))x →x 0 -אם:
כלל השרשרת:
) . πi = f (π1, …, πn −r
מודלים מוקטנים וגם
מוגדלים:
x2 x3 x4
e =1+x +
+
+
…+
!2! 3! 4
x2 x3 x4
ln (1 + x ) = x −
+
−
…+
2
3
4
1
…= 1 + x + x2 + x3 +
1−x
x
1
1
= tan u + 1
= , cot2 u + 1
cos2 u
sin 2 u
u + v
u − v
sin u + sin v = 2 sin
cos
2
2
2
u + v u − v
cos u − cos v = −2 sin
sin
2 2
1
]) sin u sin v = [ cos (u − v ) − cos (u + v
2
1
]) cos u cos v = [ cos (u − v ) + cos (u + v
2
1
]) sin u cos v = [ sin (u + v ) + sin (u − v
2
1
]) cos u sin v = [ sin (u + v ) − sin (u − v
2
דוגמה להתאמת פתרונות בשכבת הגבול:
) ) = e (1 − εξ ) + εe + O (ε ) = ex + εe + O (ε
) + (c0 − 1) ξ + c0ξe −ξ ) + O (ε2 ) = … = (1 − c0 ) x + εc1 + O (ε2
2
cos (u ± v ) = cos u cos v ∓ sin u sin v
tan u ± tan v
1 ∓ tan u tan v
sin (2u ) = 2 sin u cos u
= ) tan (u ± v
u + v u − v
sin u − sin v = 2 cos
sin
2 2
u + v
u − v
cos u + cos v = 2 cos
cos
2
2
) y in = e x + εxe x + O (ε2 ) = e 1− εξ + ε (1 − εξ )e 1− εξ + O (ε2 ) = e ⋅ e −εξ + εe ⋅ e −εξ + O (ε2
2
sin (u ± v ) = sin u cos v ± cos u sin v
2
= e (1 − εξ ) + εe (1 − εξ ) + O (ε
−ξ
+ ε (c1 − c1e
−ξ
= 1 − c0 + c0e
out
y
cos (2u ) = cos2 u − sin2 u
= 2 cos u − 1 = 1 − 2 sin u
2
2
2 tan u
1 − tan 2 u
) 1 − cos (2u
= sin 2 u
2
) 1 + cos (2u
2
= cos u
2
) 1 − cos (2u
2
= tan u
) 1 + cos (2u
= ) tan (2u
בהצלחה!
סוכם על ידי:
חן אבינדב
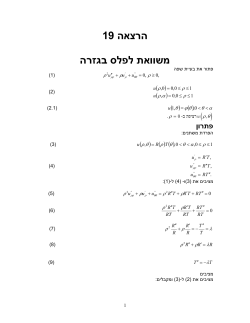
נקודות שבת של מד"ר יחידה
דיאגרמת ביפורקציה
עזרים לציור שדה כיוונים
מיון נקודות שבת במערכת לינארית
עבור המשוואה ) N ′ = f (Nמציירים גרף של ) f (N
הציר האופקי הוא הפרמטר
שמשתנה .לכל נקודת שבת,
מציירים עקום כשהציר
האנכי מציין את מיקומה.
נקודות יציבות -קו אחיד,
ולא יציבות -בקו מקווקו.
נולקלינות ,העקומים שעליהם x ′ = 0או
, y ′ = 0כיוון ששם החצים מקבילים לצירים.
כל נקודת חיתוך של הנולקלינות היא נקודת
שבת .כמו כן כדאי לצייר את החצים על גבי
הצירים הראשיים ,וכן על הוקטורים העצמיים,
משום ששם החצים מקבילים לכיוון הוקטורים.
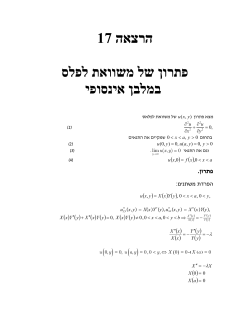
עבור המערכת , r ′ = Arכאשר ) (0, 0היא נקודת השבת היחידה.
רושמים את העקבה והדרמיננטה של המערכת ,וכן את הביטוי
. trace2 − 4 detסוג נקודת השבת נקבע מתוך הדיאגרמה הבאה:
ועל ציר Nמציינים את בעזרת חץ את הסימן של
) f (Nבכל תחום .הנקודות שבהן f (N ) = 0הן
נקודות השבת ,ואת היציבות שלהן קובע כיוון החצים
משמאל וימין להן.
שני טריקים
לינארזיציה
) x ′ = f (x , y ) , y ′ = g (x , y
אנו מוצאים את כל נקודות השבת
) ( f = g = 0ובכל אחת מחשבים:
∂ ( f , g ) fx
=
∂ (x , y ) gx
fy
gy
עבור , f , g ∈ C 1אם מתקיים ש-
lim y (t ) = L2
∞→ t
לאחר גזירה מקבלים את הקשרים:
∞→ t
אפשרי ,נקבל מד"ר עבור ) r (tאו ) θ (t
שאפשר לחקור או לפתור ומשם לראות כיצד
הפיתרון מתנהג בכלל ,ואסימפטוטית בפרט.
.2נניח f (x , y ) ≠ 0ונקבל המד"ר:
) g (x , y
dy
=
dx
) f (x , y
שיטת האנרגיה
u ′2 = 2F (u ) + C
נניח ) (0, 0נקודת שבת מבודדת של המערכת ,ומוגדרת פונקציה V (x , y ) ∈ C 1בתחום Dשמכיל את הראשית ,כך ש-
V (0, 0) = 0ו V -מוגדרת חיובית ב . D -מחשבים את הביטוי , Vɺ = Vx f + Vy gואם Vɺמוגדרת שלילית ב D -אזי
שני משפטים על פתרונות מחזוריים
טור פורייה
π
∫−π f (x ) sin nxdx
1
π
∞
a0
+ ∑ an cos nx + bn sin nx
2
n =1
∞
cne inx
∑
∫−π
= f (x ) cos nxdx , bn
∼ ) dx ⇒ f (x
−inx
∞n =−
∼ ) ⇒ f (x
π
∫−π f (x )e
1
2π
= cn
זוהי נקודת שבת יציבה אסימפטוטית .אם Vɺמוגדרת אי-חיובית ,זוהי נקודת שבת יציבה )אך לא אסימפטוטית( .ואם
בכל סביבה של ) (0, 0יש לפחות נקודה אחת שבה V > 0, Vɺ > 0או V < 0, Vɺ < 0הנקודה לא יציבה .לֶמה:
מתקיים גם:
c−n = cn
dx
−ikx
∞
∫−∞ f (x )e
. F [af (x ) + bg (x )](k ) = aF (k ) + bG (k ) .1
.2
.1תהיינה f , f ′רציפות למקוטעין בקטע ] , [−π, πאזי טור פורייה
שלה מתכנס נקודתית ל f (x 0 ) -בכל נקודת רציפות פנימית x 0של
, fובנקודות שבהן היא לא רציפה הוא מתכנס נקודתית לממוצע בין
) . f (x 0+ ) , f (x 0−בקצוות הטור מתכנס לממוצע בין ) . f (−π) , f (πאם
הטור
בהכרח מתקיים . fɶ ≡ fתוספת :אם הטור
. F [ f (x + b )](k ) = e ikb F (k ) .3
. F e icx f (x ) (k ) = F (k − c ) .4
fרציפה f ′ ,רציפה למקוטעין ו-
. F f ′ (x ) (k ) = ikF (k ) : f , f ′ ∈ L1
.7עבור
. F f
רציפה למקוטעין ו: xf (x ) ∈ L -
1
f
) . F [xf (x )](k ) = iF ′ (k
.8
עבור
f
) f (x + ) + f (x −
2
)כתוצאה
רציפה
= dk
מכך,
ikx
אם
ו: f ∈ L1 -
למקוטעין
∞
∫−∞ F (k )e
גם
. lim
∞→ m
F (k ) ∈ L
1
נקבל
.9זהות פלנשרל :עבור f , gרציפות למקוטעין
ואינטגרביליות בריבוע מתקיים –
∞
∫−∞ f (x ) g (x )dx = ∫−∞ F (k )G (k )dk
)שימושי לחישוב אינטגרלים(
n cn
∑
מתכנס ,אזי
שיוויון
∞
cn
∑
פרסבל:
= f (x ) 2 dx
∞n =−
.5משפט גיבס :תהי
π
עבור
∫−π
) (x
1
2π
=
2
) f (x
רציפה
למקוטעין,
) . fשימושי לחישוב טורים(
fגזירה ברציפות למקוטעין ,ונניח שהיא לא
m
a0
+ ∑ an cos nx + bn sin nx
2
n =1
= , Smאזי קיימת סדרת נקודות
1
2π
התמרת פורייה בדידה
קונבולוציה בדידה
נתונות nדגימות של פונקציה
בנקודות . x jרוצים למצוא את
המקדמים ckכך שעבור הטור:
עבור שתי סדרות f , gבאורך nנגדיר
f
) f (x m ) − Sm (x m
מונוטונית x m → x 0כך ש≥ 0.089 -
jump of f (x ) at x 0
p (x ) = ∑ ck e
. j = 0, 1, …, n − 1למשל עבור n = 4
דגימות של הפונקציה ,נקבל את מערכת
המשוואות:
1 c
f (0)
0
ω 3 c1 f (π / 2)
=
6
ω c2 f (π)
c
ω 9 3 f (3π / 2)
1
ω2
ω4
ω6
1 1
1 ω
1 ω 2
3
1 ω
1
מתקיים Fn
n
זוגית:
יהיו f , gסדרות באורך , nכך ש) f = Fn fˆ, g = Fn gˆ -כלומרfˆ ,
ו gˆ -הן התמרות פורייה הדיסקרטיות של fו ,( g -אזי מתקיים:
) . f ∗ g = nFn ( fˆ gˆ) , fˆ ∗ gˆ = Fn−1 ( f g
x=0
−L ≤ x < 0
.
זהויות טריגונומטריות
sin (u ± v ) = sin u cos v ± cos u sin v
) flip : ( f2 , f1 , f0
) a 0 = ( f0 , f2 , f1 ) ⋅ (g 0 , g1 , g2
שימושי לצורך כפל פולינומים – למשל
אם נרצה לכפול את שני הפולינומים:
2
f = f0 + f1x + f2 x , g = g 0 + g1x + g 2x
2
לצורך כך נגדיר את הסדרות החדשות:
)f = ( f0 , f1 , f2 , 0, 0) , g = (g 0 , g1 , g 2 , 0, 0
) f (x
h (x ) = 0
(
)
f −x
המכפלה יהיה … . a 0 + a1x + a2 x 2 +
ניתן גם להשתמש בשיטה זו כדי לכפול
מספרים גדולים כאשר מציבים . x = 10
המשכה מחזורית:
−L < x < L
x = ±L
) f (x
) F (x ) = f (−L ) + f (L
2
וכן ) . F (x + 2L ) = F (x
קונבולוציה
cos (u ± v ) = cos u cos v ∓ sin u sin v
tan u ± tan v
1 ∓ tan u tan v
1
1
= , cot2 u + 1
cos2 u
sin2 u
u + v
u − v
1
sin u sin v = [ cos (u − v ) − cos (u + v )] sin u + sin v = 2 sin 2 cos 2
2
u + v u − v
1
sin
cos u cos v = [ cos (u − v ) + cos (u + v )] sin u − sin v = 2 cos
2 2
2
u + v
u − v
1
sin u cos v = [ sin (u + v ) + sin (u − v )] cos u + cos v = 2 cos
cos
2
2
2
1
u
+
v
u
−
v
cos u sin v = [ sin (u + v ) − sin (u − v )] cos u − cos v = −2 sin
2 sin 2
2
= tan2 u + 1
) f (x
g (x ) =
) f (−x
אי-זוגית:
0<x ≤L
למשל עבור n = 3נבצע את חישוב את
המקדמים באופן הציקלי הבא:
) f = ( f0 , f1 , f2
נחשב את המקדמים , akואז פולינום
הרחבות של פונקציות
−L ≤ x ≤ 0
i + j =0
) (mod n
) a 2 = ( f2 , f1, f0 ) ⋅ (g 0 , g1, g2
= Fn−1וכך למעשה ניתן
0≤x ≤L
∑
= a0
) a1 = ( f1 , f0 , f2 ) ⋅ (g 0 , g1 , g 2
כאשר ω = e iπ / 2שורש היחידה מסדר
. 4אם נסמן את המטריצה , Fnאזי
. lim
נגדיר. ( f0 , f1 , …, fn−1 )(g 0 , g1 , …, gn −1 ) = ( f0 g 0 , f1g1 , …, fn −1gn−1 ) :
… fi g j ,
∑
= fi g j , a1
i + j =1
) (mod n
k =0
∞→ m
) f ∗ g = (a 0 , a1, …, an −1כאשר:
n −1
למצוא את המקדמים . ck
משפט הקונבולוציה הדיסקרטית
( F [F (k )] (x ) = f (−x ) / 2π
∞
k
∞
רציפה בנקודה ] . x 0 ∈ [−π, πנסמן ב Sm -את הסכום החלקי
של 2Lודוגמים אותה בתדירות גדולה מ 2L -ניתן לבצע שחזור מדוייק ומלא שלה.
יתקיים השיוויון ) p (x j ) = f (x jלכל
∞n =−
2
m
cne inx
∞
∑
∞n →±
) (x ) (k
) n π sin (Lx − n π
⋅ . f (x ) = ∑ f כלומר ,אם לפונקציה יש רוחב פס
, k ≥ Lאזי
L
Lx − n π
∞n =−
מתכנס במ"ש לפונקציה רציפה ) , fɶ (xכשלא
.3הלֶמה של רימן-לבג :עבור ) f (xרציפה למקוטעין. lim cn = 0 ,
) (m
∞
ikx
הטור פורייה הנ"ל מתכנס במ"ש ל fɶ ∈ C k -לכל הפחות.
= ) . F [ f (ax )](k
.6באופן דומה= (ik ) F (k ) :
cn
∑
מתכנס אז
∞n =−
.4
.5עבור
∞
.2יהיו cnמקדמי פורייה של ) , f (xאם הטור
F (k ) .0רציפה בכל ℝודועכת באינסוף לאפס.
1 k
F
a a
משפטים של פורייה וחברים
משפט הדגימה של נייקוויסט
∞n =−
= ) F [ f (x )](k ) = F (k
אם"ם
שלילית
תהי ) f (xרציפה למקוטעין ואינטגרבילית בהחלט ,ונניח שמתקיים F (k ) = 0לכל
גם ) , f (π) = f (−πהטור פורייה יתכנס במ"ש בכל הקטע.
התמרת פורייה
חיובית
b 2 − ac < 0, a > 0
ומוגדרת
אם"ם
. b 2 − ac < 0, a < 0
שמוכל ממש בקטע הזה .אם הפונקציה רציפה בכל ] [−π, πומתקיים
עבור ) f (xרציפה למקוטעין ואינטגרבילית
בהחלט מגדירים את התמרת פורייה:
1
2π
V (x , y ) = ax 2 + 2bxy + cy 2
מוגדרת
fרציפה בקטע כלשהו ,אז הטור פורייה מתכנס במ"ש בכל קטע
1
cn = (an − ibn ),
2
קיום ויחידות של מסלולים
עבור , f , g ∈ C 1דרך כל נקודה ) (x 0 , y 0במישור הפאזה עובר פיתרון
יחיד .דרך ההוכחה :מניחים בשלילה ששני פתרונות עוברים שם
בזמנים שונים ,מבצעים הזזה של פיתרון אחד כך ששניהם יעברו שם
באותו הרגע ,ומקבלים סתירה למשפט קיום ויחידות של מד"ר.
פונקציית ליאפונוב
.1כל מסלול מחזורי Cשמתאר פיתרון מחזורי של המערכת חייב להקיף לפחות נקודת שבע
אחת.
.2פואנקרה-בנדיקסון D :תחום סגור וחסום שלא מכיל אף נקודת שבת .אם מסלול פיתרון
מוכל ב D -לכל , t ≥ t0אז או שהוא מסלול סגור )ו מחזורי( ,או שהוא מתקרב למסלול פיתרון
סגור עבור ∞ → ) . tבשביל להשתמש במשפט זה ,מגדירים בדרך כלל טבעת סביב נקודת שבת(
π
= λ1,2
ונזכור שאנחנו לא מתעסקים במקרים שבהם det = 0משום שאז לא
מדובר כבר בנקודת שבת מבודדת .על הפרבולה ניתן גם לקבל קרניים
ישרות ,אם לע"ע הבודד יש שני ו"ע שונים .כללי אצבע :הראשית
יציבה אסימפטוטית אם"ם לכל הע"ע יש חלק ממשי שלילי .היא
תהיה לא יציבה אם"ם יש לפחות ע"ע אחד עם חלק ממשי חיובי .היא
תהיה יציבה )אך לא אסימפטוטית( אם לכל הע"ע יש חלק ממשי אי-
חיובי ,ולכל הע"ע המדומים טהורים יש ר"א שווה ל-ר"ג.
ש (ρ f )x + (ρg )y -בעל סימן קבוע ,אז
בתחום זה לא קיים פיתרון מחזורי.
ומציירים את u ′כפונקציה של uעל מישור הפאזה ,עבור קבועים שונים .בגלל שיש שני
ענפים לכל קבוע ,נקבל תמיד אוכפים ומוקדים ,ולא ספירלות .חשוב לבחור ערכים "מעניינים"
של ) Cשבמחינה פיסיקלית ,אגב ,מייצג את האנרגיה(.
1
π
trace± trace2 − 4 det
2
אם הסימן של הביטוי fx + gyהוא בעל
סימן קבוע בתחום מסויים ,אזי בתחום זה
לא קיים אף פיתרון מחזורי.
וריאציה :אם קיימת פונקציה ρ ∈ C 1כך
עבור בעיות מהצורה ) , u ′′ = f (uכופלים המשוואה ב u ′ -ומבצעים אינטגרציה:
= an
הערכים העצמיים הם:
קריטריון בנדיקסון
שאולי אפשר לפתור) .אם f = 0נעשה להיפך,
אם גם g = 0אז זו נקודת שבת ואין בעיה(.
⇒ u ′ = ± 2F (u ) + C
∞→ t
לכן ,אם
מונוטוניות
) N 1 (t ) , N 2 (t
וחסומות ,זה אומר שקיים הגבול שלהן עבור
שהן
אומר
וזה
∞→ ,t
חייבות לשאוף לנקודת שבת שבה
. Nɺ 1 = Nɺ 2 = 0כך ניתן להוכיח בשלילה
שפיתרון לא יכול להישאר חסום בתחום
כלשהו כאשר ) N1 (t ) , N 2 (tמונוטוניות,
אם אין בתחום זה נקודת שבת יציבה.
מציבים את מערכת המשוואות שלנו ומנסים
להביע את אגף ימין כפונקציה של . r, θאם זה
וממשיכים בניתוח לפי מיון של נקודות
שבת במערכת לינארית .משפט :אם
במערכת הלינארית קיבלנו נקודת שבת
מסוג צומת ,אוכף או ספירלה גם
למערכת הלא-לינארית יש נקודת שבת
מסוג דומה באותה נקודה .בפרט ,אם
הנקודה היא יציבה אסימפטוטית
במערכת הלינארית ,היא תהיה כזו גם
במערכת הלא-לינארית.
lim x (t ) = L1,
∞→ t
⇒ lim x ′ (t ) = lim y ′ (t ) = 0
rr ′ = xx ′ + yy ′, r 2 θ ′ = xy ′ − x ′y
= J
הוכחת חסימות של פתרונות
.1מערכת לקואורדינטות פולריות:
) r 2 = x 2 + y 2 , θ = tan−1 (y / x
בהינתן המערכת הלא-לינארית:
= ) tan (u ± v
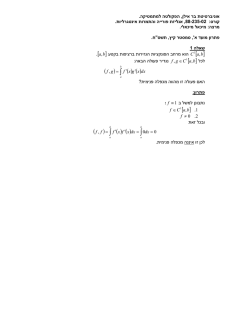
תהיינה f , gמוגדרות בכל הישר ,הקונבולוציה של fעם gהיא:
∞
∫−∞ f (x − t ) g (t )dt
= ) ( f ∗ g )(x
עבור f , gרציפות למקוטעין ואינטגרביליות בהחלט ,הפונקציה
f ∗ gקיימת ,והיא רציפה ואינטגרבילית בהחלט .תכונות:
) ( f + g ) ∗ h = f ∗ h + g ∗ h, ( f ∗ g ) ∗ h = f ∗ (g ∗ h
) f ∗ g = g ∗ f , (α f ) ∗ g = f ∗ (αg ) = α ( f ∗ g
משפט הקונבולוציה :אם f , g ∈ L1רציפות למקוטעין מתקיים -
) F [ f ∗ g ](k ) = 2πF (k )G (k






© Copyright 2026